液壓挖掘機(jī)多路閥同步性能負(fù)載敏感性分析
2016-02-16 10:06:36O曠水章湖南交通工程學(xué)院湖南421009
當(dāng)代化工研究 2016年8期
關(guān)鍵詞:分析
O曠水章(湖南交通工程學(xué)院 湖南 421009)
液壓挖掘機(jī)多路閥同步性能負(fù)載敏感性分析
O曠水章
(湖南交通工程學(xué)院 湖南 421009)
傳統(tǒng)負(fù)流量控制多路閥進(jìn)行復(fù)合動(dòng)作時(shí),其各分支輸出流量受負(fù)載壓力影響較大,有動(dòng)作協(xié)同性差的不足點(diǎn),出于這一現(xiàn)象,搭建了負(fù)流量控制多路閥數(shù)學(xué)模型,對(duì)其負(fù)載敏感性進(jìn)行了仿真分析,找到了影響其同步性能的敏感因素。
液壓挖掘機(jī);多路閥;同步性能
引言
伴隨改革開(kāi)放的繼續(xù)推進(jìn),工業(yè)現(xiàn)代化繼續(xù)深入,社會(huì)對(duì)工程機(jī)械的資源有效率和工作性能等提出了進(jìn)一步的需要。目前國(guó)外對(duì)多路閥的研究已經(jīng)相對(duì)成熟,已經(jīng)大量的投入到生產(chǎn)使用當(dāng)中,最知名的如德國(guó)的Rexroth、美國(guó)的Husco和日本的Kyb等生產(chǎn)廠商。國(guó)內(nèi)也有部分高等院校和研究機(jī)構(gòu)對(duì)它進(jìn)行過(guò)一些研究。本文通過(guò)對(duì)負(fù)流量節(jié)流控制系統(tǒng)的理論研究,搭建負(fù)流量控制系統(tǒng)的數(shù)學(xué)模型。通過(guò)AMESim軟件搭建挖掘機(jī)結(jié)構(gòu)的仿真模型,對(duì)挖掘機(jī)在執(zhí)行復(fù)合動(dòng)作時(shí)多路閥的同步性能負(fù)載敏感性進(jìn)行仿真分析,找出影響其同步性能的敏感因素。
1.負(fù)流量控制系統(tǒng)研究
(1)工作原理
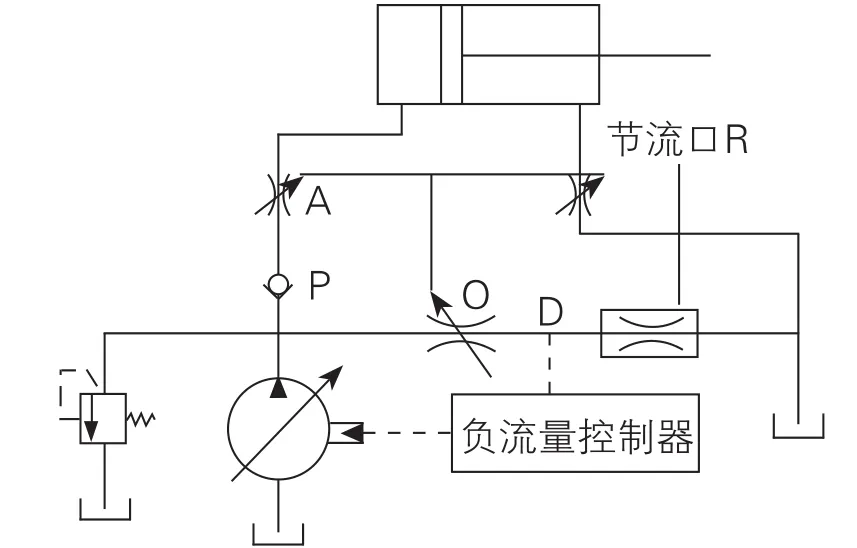
圖1 負(fù)流量控制原理
本章將分析的主體是川崎企業(yè)研發(fā)的K3V系列多路閥及液壓泵組建的負(fù)流量控制系統(tǒng),其多路閥中的三位六通閥的負(fù)流量控制系統(tǒng)可以簡(jiǎn)化為如圖1所示的結(jié)構(gòu)。其工作原理如下:當(dāng)不操縱多路閥動(dòng)作(即主閥芯處于中位)時(shí),節(jié)流口A、B口關(guān)閉,旁路回油口O全開(kāi),系統(tǒng)通過(guò)旁路回油口O卸荷;當(dāng)控制多路閥運(yùn)動(dòng)時(shí),節(jié)流口A、B口慢慢開(kāi)啟,從主液壓泵的壓力油液體被隔成兩份,其中一份通過(guò)節(jié)流口A進(jìn)入執(zhí)行元件做功,然后經(jīng)過(guò)節(jié)流口B回到油箱,同時(shí)隨著旁路回油口O的逐漸關(guān)閉,另一部分流量則經(jīng)過(guò)多路閥的旁路回油口O,節(jié)流后回到油箱(以下將這部分流量稱為“旁路回油”),產(chǎn)生很大的功率損失,使系統(tǒng)嚴(yán)重發(fā)熱。
(2)數(shù)學(xué)計(jì)算模型
液壓泵流量連續(xù)方程:

液壓泵到節(jié)流口O及節(jié)流口A的關(guān)系表達(dá)式:

節(jié)流口A的壓力—流量表達(dá)式:

節(jié)流口O上的流量—壓力方程:

負(fù)流量檢測(cè)口R上的流量—壓力方程:

2.建模仿真分析
考慮多路閥里面的任一個(gè)閥,其結(jié)構(gòu)是節(jié)流控制的三位六通閥。當(dāng)操作手柄運(yùn)動(dòng)時(shí),閥芯的位移量是由先導(dǎo)壓,力的大小來(lái)決定的,接著改變各節(jié)流口的通流面積。應(yīng)用AMESim中HCD庫(kù)搭建負(fù)流量控制多路閥仿真模型,其中節(jié)流口通流面積隨閥芯行程變化的數(shù)據(jù)通過(guò)matlab編程計(jì)算得到。本文主要針對(duì)挖掘機(jī)動(dòng)臂聯(lián)及回轉(zhuǎn)聯(lián)的協(xié)同控制采取建模仿,真分析,圖2是進(jìn)行回轉(zhuǎn)聯(lián)及動(dòng)臂聯(lián)協(xié)同動(dòng)作時(shí)的AMESim仿真模型。
給挖掘機(jī)實(shí)現(xiàn)回轉(zhuǎn)-動(dòng)臂協(xié)同運(yùn)動(dòng)仿真研究,回轉(zhuǎn)聯(lián)及動(dòng)臂聯(lián)的載荷壓力都調(diào)節(jié)到15Mpa,另外的數(shù)據(jù)按如下表1調(diào)節(jié)好。從而獲得兩動(dòng)作閥在相等的載荷下的流量分配規(guī)律線,見(jiàn)3圖。通過(guò)讀圖可知,理想流,量分,配曲線及仿真得,到的流量分,配曲線大概類似,可知在回,轉(zhuǎn)聯(lián)及動(dòng),臂聯(lián)載荷壓力相等的狀態(tài)時(shí),可以根據(jù)駕駛者的動(dòng)作達(dá)到流量分配。

表1 AMESim模型仿真參數(shù)表
給回轉(zhuǎn)聯(lián)及動(dòng)臂聯(lián)設(shè)置不一樣的載荷壓力實(shí)現(xiàn)仿真研究,載荷力大小分別調(diào)節(jié)為20、10Mpa,另外數(shù)據(jù)保持一樣,可得兩控制聯(lián)在不等載荷時(shí)的分配流量規(guī)律,如圖3。分析曲線可知,理論分配流量曲線及仿真獲得的分配流量曲線區(qū)別不小,分析原因?yàn)榛剞D(zhuǎn)閥載荷力比動(dòng)臂閥載荷力小,從此使得回轉(zhuǎn)閥的液壓油變多,大于理論流量值;流經(jīng)動(dòng)臂閥的流量變少,小于理論流量值。可知在兩聯(lián)復(fù)合動(dòng)作且載荷力不同的狀態(tài)時(shí),不能根據(jù)駕駛者想法達(dá)到理論流量配置。
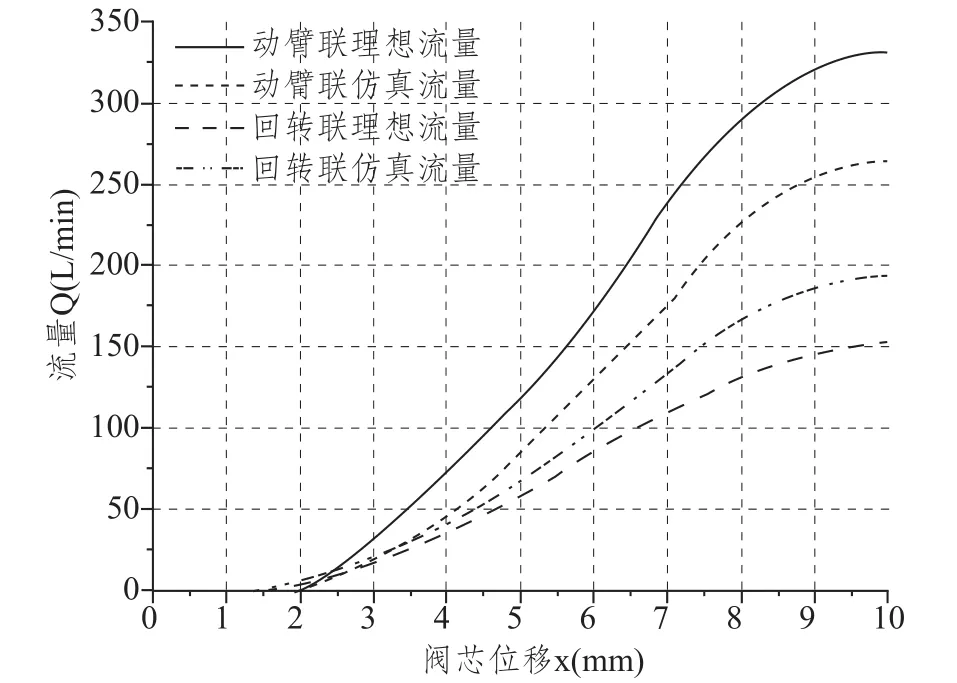
圖3 復(fù)合動(dòng)作流量分配(負(fù)載不同)
3.試驗(yàn)驗(yàn)證
(1)試驗(yàn)方案
該試驗(yàn)是在自行設(shè)計(jì)制造的多路閥綜合檢測(cè)試驗(yàn)臺(tái)上完成。
(2)試驗(yàn)分析
實(shí)現(xiàn)載荷力不等大的協(xié)同運(yùn)動(dòng)試驗(yàn)時(shí),給回轉(zhuǎn)閥載荷力調(diào)節(jié)到10MPa,動(dòng)臂閥載荷力調(diào)節(jié)到20MPa,通過(guò)試驗(yàn)獲得的配置流量規(guī)律見(jiàn)4圖。
進(jìn)行試驗(yàn)獲得的回轉(zhuǎn)-動(dòng)臂協(xié)同運(yùn)動(dòng)配置流量規(guī)律和仿真研究算出的協(xié)同運(yùn)動(dòng)配置流量規(guī)律進(jìn)行比較分析,可知兩類辦法獲得的數(shù)據(jù)非常接近,偏差不大,從而可以證明仿真研究獲得的各聯(lián)閥配置流量曲線是正確有效的,可以證明仿真模型的正確性。
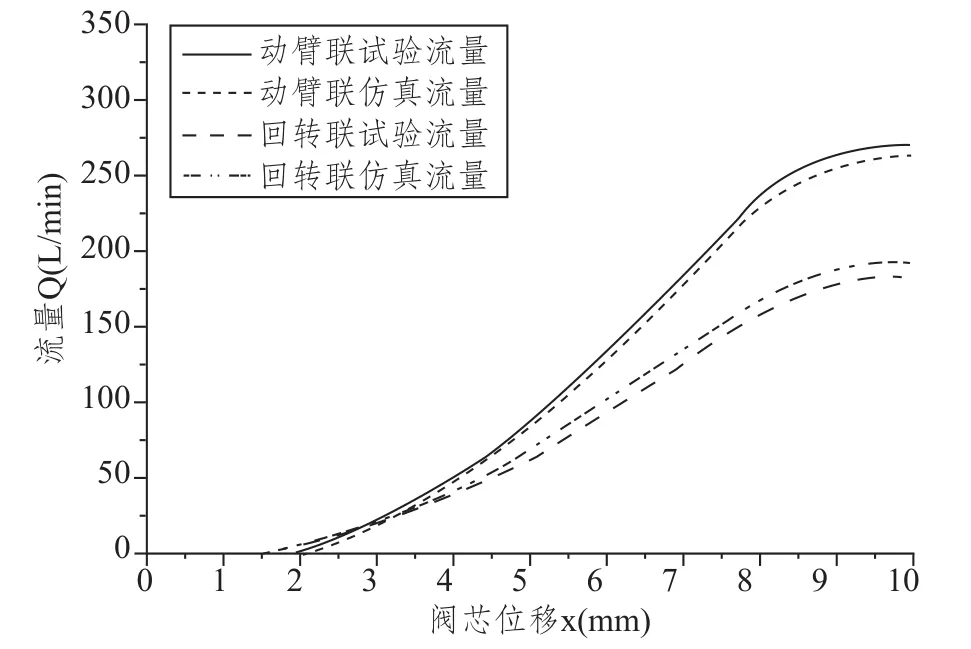
圖4 動(dòng)臂-回轉(zhuǎn)聯(lián)流量試驗(yàn)曲線(負(fù)載不同)
由之前對(duì)多路閥,閥芯節(jié)流口面積和負(fù)流量,控制數(shù)據(jù)的研究,可見(jiàn)閥口O的面積變化規(guī)律對(duì)整個(gè)系統(tǒng)的控制性能起決定性作用,而與閥口A和B差不多沒(méi)有聯(lián)系。可以把原來(lái)的節(jié)流孔通流,面積導(dǎo)入到AMESim模型中仿真分析,判斷仿真結(jié)果動(dòng)臂聯(lián)流量與理想流量曲線之間的偏差是否小于3L/min,假設(shè)小于則所求的面積則是需要的優(yōu)化值,否則,以仿真結(jié)果得到的流量為初始數(shù)據(jù)代入到節(jié)流口面積優(yōu)化公式中進(jìn)行迭代循環(huán)計(jì)算,達(dá)到條件才結(jié)束。
4.結(jié)論
(1)建立的負(fù)流量控制系統(tǒng)仿真模型是正確的,為設(shè)計(jì)人員對(duì)液壓系統(tǒng)中各結(jié)構(gòu)參數(shù)優(yōu)化設(shè)計(jì)提供了依據(jù)。
(2)可以通過(guò)優(yōu)化負(fù)流量控制多路閥,解決傳統(tǒng)多路閥輸出流量受載荷壓力影響較大、協(xié)同運(yùn)動(dòng)難以實(shí)現(xiàn)合理配油的問(wèn)題;優(yōu)化后系統(tǒng)的壓力損失將會(huì)減小,系統(tǒng)的節(jié)能效果會(huì)提升。
[1]投資工程機(jī)械關(guān)鍵零部件領(lǐng)域的最好時(shí)機(jī)[J].液壓氣動(dòng)與密封, 2011(09):38.
[2]張德勝,郭勇.液壓挖掘機(jī)典型液壓控制系統(tǒng)分析[J].建筑機(jī)械, 2007(21):86-88.
[3]郭雄華,曹顯利.挖掘機(jī)負(fù)流量液壓系統(tǒng)的控制特性分析[J].液壓與氣動(dòng),2011(05): 55-57.
[4]LMS.AMESim系統(tǒng)建模和仿真實(shí)例教程[M].北京航空航天大學(xué)出版社,2011.
Load Sensitivity Analysis of Hydraulic Shovel Multitandem Valve Synchronous Property
Kuang Shuizhang
(Hunan Traffi c Engineering College, Hunan, 421009)
When the traditional negative fl ow control multi-way valve takes the composite moves, its output fl ow of each branch is infl uenced greatly by the loading pressure and has the shortcoming of weak action synchronicity. In order to solve this problem, we establish the mathematical model of negative fl ow control multi-way valve and take simulation analysis of its loading sensitivity, besides, we fi nd out the sensitive factors infl uencing the synchronization performance.
hydraulic shovel;multitandem valve;synchronous property
湖南省教育廳高等學(xué)校科研項(xiàng)目(15C0494)、湖南省大學(xué)生研究性學(xué)習(xí)和創(chuàng)新性實(shí)驗(yàn)計(jì)劃項(xiàng)目(634)
T
A
曠水章(1986~),男,湖南交通工程學(xué)院,研究方向:汽車電子。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
