應用于遠程圖像監控的四軸飛行器
2016-02-06 05:44:44廖健林許生鴻蔡展標胡均萬
電腦與電信 2016年11期
關鍵詞:單片機
廖健林 許生鴻 蔡展標 劉 燕 胡均萬
(嘉應學院電子信息工程學院,廣東 梅州 514015)
應用于遠程圖像監控的四軸飛行器
廖健林 許生鴻 蔡展標 劉 燕*胡均萬
(嘉應學院電子信息工程學院,廣東 梅州 514015)
介紹一種基于5.8 G圖像傳輸技術,可以用于森林防火防盜巡邏、電力巡檢等情況的四軸飛行器。該飛行器采用C o r t e x-M 4架構的ST M 3 2單片機作為主控芯片,以M PU 6 0 0 0運動傳感器、H M C 58 8 3 L磁力計來獲取無人機姿態位置信息。主控芯片將傳感器所采集的值,利用慣性導航技術和數據融合技術通過四元數運算求出當前的飛機姿態,然后通過PID算法實現穩定飛行。
5.8 G圖像傳輸;ST M 3 2單片機;慣性導航技術;數據融合;四元數;PID算法
1 引言
四軸飛行器屬于一種小型飛行器,可以靈活在空中飛行,具有很高的可控性。利用搭載在四軸飛行器上的5.8G遠程圖像傳輸模塊,可以通過顯示屏觀察回傳過來的圖像,替代人工巡邏等情況。從而節省人力物力,只需要一個操作人員通過觀察遠程傳來的圖像對飛行器進行操作。
一般來說,市場上很多四軸飛行器使用的電子調速器是通過脈沖寬度控制的,普遍控制頻率都在200Hz~600Hz,根據四軸飛行器的設計要求,設計了一款利用IIC總線協議控制的電子調速器,控制頻率提升到400KHz,從而提高飛行器的響應速度[1]。同時飛行控制板采用Cortex-M4架構的單片機,其主頻可達168MHz,并且內核集成了FPU浮點運算單元,提高了姿態解算和PID運算的速率。
四軸飛行器機體采用碳纖維材料作為中心板,鋁方管作為機臂,使機身重量降低的同時不改變機身強度,同時增加了續航時間。
2 總體設計
2.1 機械結構設計
機架中心板使用碳纖維,機臂使用鋁方管,如圖1所示。這樣的架構使用的材料最少、質量最輕、強度最大和靈活性最高。
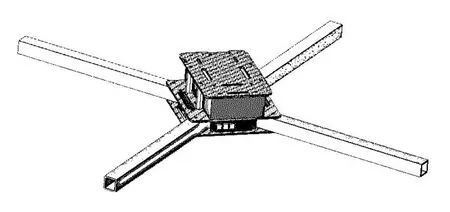
圖1 機架結構圖
2.2 系統結構設計
四軸飛行器主要由遙控器、飛行控制板、圖像傳輸和動力系統組成[2],其系統結構圖如圖2所示。
遙控器端單片機通過采集操作桿的ADC值,經過2.4G發射模塊發送到飛行控制板端。遙控器端可以通過按鍵來完成功能設置和參數調節等操作,蜂鳴器用作遙控電池低電壓報警。
飛行控制板端通過SPI總線獲取MPU6000的陀螺儀和加速度計值,利用一系列的算法運算得出當前姿態,根據2.4G接收模塊接收到的遙控數據調整姿態,實現一系列復雜的飛行動作。
圖像傳輸選用5.8G圖像傳輸技術的TS835模塊,傳輸距離可達2公里遠,可以通過觀察遠程回傳的圖像來控制飛行和巡邏工作。動力系統則采用IIC總線控制方案設計出電子調速器。

圖2 系統結構圖
3 硬件設計
3.1 飛行控制板設計
飛行控制板硬件電路結構示意圖如圖3所示,由于STM32單片機具有性價比高、外設豐富、主頻較高和帶有浮點運算單元等優點,采用了STM32F407VGT6這款芯片作為主控核心[3]。MPU6000運動傳感器內部集成了高精度的陀螺儀和加速度計,且價格低廉性能穩定。HMC5883L具有高靈敏度和線性高精度的特點,故用于作為航向角的校準。
四軸飛行器采用IIC控制的電子調速器,因此要克服外圍大電流對IIC總線所產生的電磁干擾,抗干擾電路采用了10K歐的電阻分別上拉時鐘線和數據線到5V,然后再用1K歐的電阻分別串聯到時鐘線和數據線上。
2.4 G接收模塊通過SPI總線控制,直接讀取由遙控器端發送過來的控制數值,然后經過校驗后送到PID作為參考值。
穩壓電路采用了LP2992-3.3低噪聲線性輸出穩壓芯片。

圖3 飛行控制板硬件電路結構示意圖
3.2 遙控器設計
遙控器電路結構示意圖如圖4所示,同樣遙控器主控芯片選用STM32F103RBT6,然后通過內部ADC采集控制搖桿的電壓值,將該值進行限幅和死區設置轉化成控制值,最后通過SPI總線控制2.4G發射機發送該數據。用戶可以通過按鍵設定飛行器的飛行參數等。若遙控器電池過低,即單片機ADC采集的值低于設定低壓值時,蜂鳴器通電發聲提醒用戶充電。
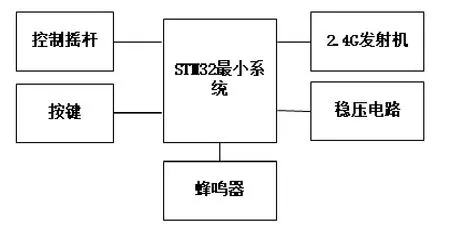
圖4 遙控器電路結構示意圖
3.3 電子調速器設計
電子調速器電路采用AVR單片機設計系統部分,結構示意圖如圖5所示,其中Atmega 8A作為控制芯片,通過ADC采集和過零檢測電路檢測過零信號,若檢測到過零信號,主控通過PWM控制電機驅動電路實現換相。
電機驅動電路由3對N和P組合的MOSFET管兩兩導通控制相位導通,從而實現電路換流,實現電機換相。
主控器通過定時器中斷,開啟電流測量,電流測量電路由一條固定阻值的蛇形走線,并聯一個小電容,最后通過主控器的ADC采集該電壓值,然后轉化成電流值。
低壓保護電路通過電阻分壓來擴大測量量程,然后通過并聯一個小電容作為濾波,直接輸出到主控的ADC,再得出電壓值。

圖5 電子調速器電路結構示意圖
4 程序設計
4.1 主控程序
飛行控制板上電后,單片機初始化所需的通信總線如IIC、SPI、UART,同時初始化定時中斷。通過通信總線來配置和初始化傳感器工作。開啟無線接收,接收來自遙控發出的數據,返回機體姿態等信息回遙控,電腦上位機通過讀取遙控串口輸出的值來獲取飛機返回的信息。單片機根據傳感器采集的數值做一系列的數學運算得到機體姿態信息,通過與接收到的遙控值做誤差輸入到PID運算子程序,通過PID來調節飛機,從而達到所期望的姿態[4],其主控程序流程圖如圖6所示。

圖6 主控程序流程圖
4.2 姿態解算
系統上電初始化后獲取各傳感器的原始數據,經過一系列的濾波得到比較準確的值,利用四元數將地理重力加速度變換到飛行器坐標上的加速度,即將n系坐標系(地理坐標系)的數值轉換到b系坐標系(機體坐標系)上得到重力分量,再把機體上的加速度計讀取的值做歸一化處理,然后與b系坐標系上的重力分量做外積,求出零偏值,最后通過比例-積分處理融合到三軸角速度上。將融合后的三軸角速度通過一階龍格-庫塔法,更新為四元數,再進行歸一化處理。通過四元數轉換歐拉角公式得到當前的航向角、俯仰角和橫滾角,姿態解算流程圖如圖7所示[5]。
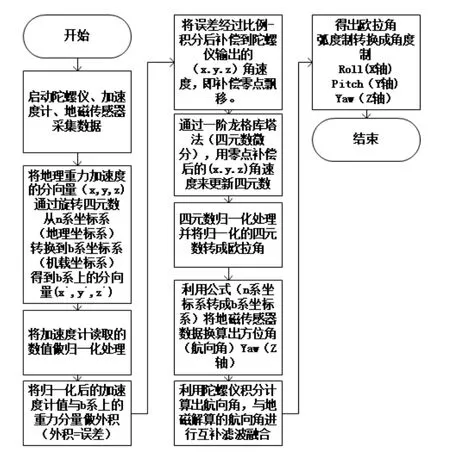
圖7 姿態解算流程圖
4.3 PID算法控制
運用串級PID位置式控制算法,把外環輸出作為內環的誤差輸入,提高系統的穩定性。通過工程上的試湊方法分別得到比例P、積分I和微分D作用的參數大小。
PID控制算法流程圖如圖8所示[6],其中,對于外環部分:外環角度誤差=期望角度-當前角度;外環積分+=外環角度誤差;外環輸出=外環角度誤差*P+外環積分*I;為防止滯后效應,適當對積分做一下限幅。而對于內環部分:內環角速度誤差=外環輸出-當前角速度值;內環積分+=內環角速度誤差;內環微分項=D*(上次角速度值-當前角速度);內環輸出=外環角度誤差*P+外環積分*I+內環微分項輸出;并對上次角速度值進行保存;同樣地對積分環節做一下限幅操作。
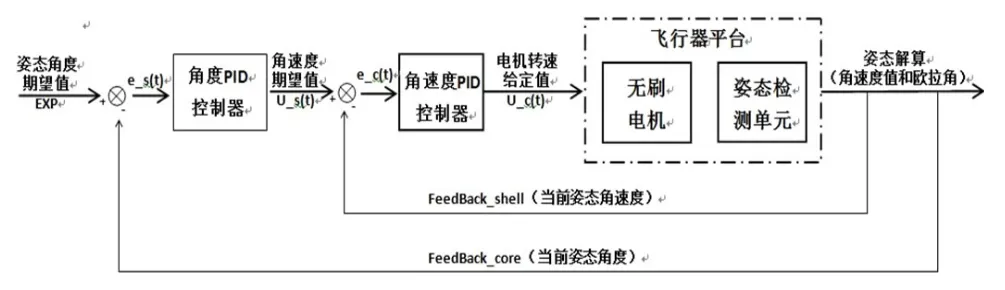
圖8 PID控制算法流程圖
5 系統測試
5.1 電子調速器線性度測試
由于PID控制器屬于線性控制器,因此要保證控制通道與電機輸出力矩是線性的。本文利用杠桿原理搭建了一個測試平臺,對單個電子調速器進行了線性度測試。
線性度測試使用了勝利牌DM6234P非接觸式數字轉速測量表和精準臺秤,分別測試出當前的單個新西達2208電機升力,從控制量為40開始每隔5取一個測試點,得出數據如表1所示,可以觀察出數據分布大致呈一條斜線,可得該電子調速器線性度良好。
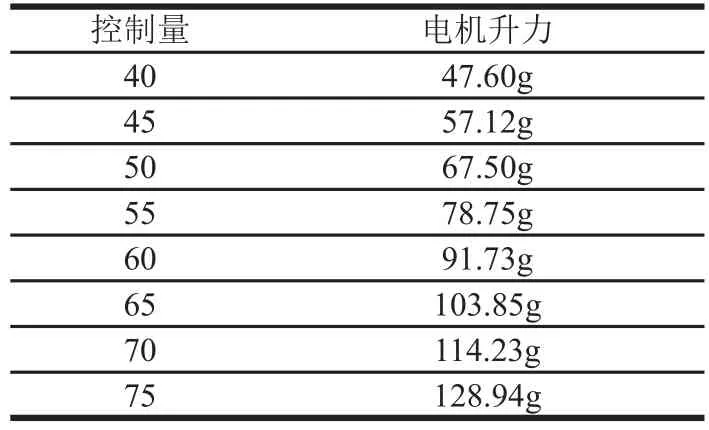
表1 電子調速器線性度測試
5.2 飛行測試
將油門緩抬高,使飛行器平穩離地2米高,觀察地面站調試平臺中顯示的當前飛行器三維姿態,可以發現航向角略微有點偏差,但是橫滾角和俯仰角卻保持平穩,飛行器能夠平穩地在空中飛行。通過遙控改變俯仰角,飛行器能平穩地實現前進和后退;改變橫滾角,飛行器能平穩地實現左右移動;改變航向角,飛行器能旋轉任意角度。實驗飛行測試效果圖參考圖9。
對于遙控器的感應距離測試和圖像傳輸距離測試,我們采取靜止測試的途徑,即是將四軸飛行器用尼龍扎帶固定好,然后每隔100米輕抬一下遙控油門,同時觀察屏幕的圖像清晰度判斷信號的強度,實際測量得到表2數據。

表2 遙控距離和圖像傳輸距離測試

圖9 實驗飛行測試效果圖
6 結語
該四軸飛行器通過MPU6000和HMC5883L采集數據,然后把飛行姿態解算成歐拉角,并根據當前姿態與遙控給定值做誤差處理,再通過PID算法來實現遙控對飛機各種姿態的控制,其中包括俯仰、橫滾、機動自旋等高難度動作,飛行器控制正常。同時實現其與電腦上位機的無線通信,實時得到四軸飛行器的姿態等信息,方便人們調試PID參數以及了解飛行器的運行狀況。無刷無感電機電子調速器設計合理,具有帶負載重、控制精度高和響應速度快等優點。通過顯示屏觀察5.8G模塊回傳的圖像可見,在1.5公里以內圖像清晰穩定。
[1]曹杰,史金飛,戴敏.基于M EG A 8單片機的無傳感器無刷直流電機控制系統設計[J].自動化儀表,2 0 0 5(12):13-16.
[2]周建陽,陳家樂,薛斌,等.基于ST M 3 2四軸飛行器的設計[J].欽州學院學報,2 0 15(0 2):3 1-3 3.
[3]張天華.基于ST M3 2 F4系列單片機的四旋翼自主飛行器系統[J].電子制作,2 0 16(2 1):7-8.
[4]周賀.基于ST M 3 2單片機的三葉漿四旋翼飛行器設計[J].電腦知識與技術,2 0 14(2 1):512 6-512 8.
[5]朱陽,王偉成,王民慧.基于M PU 9 150的四軸飛行器姿態控制系統設計[J].制造業自動化.2 0 15(10):46-48.
[6]陸偉男,蔡啟仲,李剛,等.基于四軸飛行器的雙閉環PID控制[J].科學技術與工程,2 0 14(3 3):12 8-13 1.
AQuadcopter for Remote Image Monitoring
Liao Jianlin Xu Shenghong Cai Zhanbiao Liu Yan*Hu Junwan
(Jiaying University,Meizhou 514015,Guangdong)
This paper mainly introduces a kind of quadcopter based on 5.8G image transmission technology,which is widely used in the power patrol and daily forest patrol.This design takes Cortex-M4 architecture of STM32 microprocessor as the center core,and obtains the position and attitude of the UAV by the MPU6000 and HMC5883L.The data of the sensor is collected by the main control chip,and the current attitude of the aircraft is obtained by using the inertial navigation technology through the four element calculation.Finally,the control of flight attitude is realized by the PID algorithm.
5.8G image transmission technology;STM32 microprocessor;inertial navigation technology;data fusion techniques;PID algorithm
V249
A
1008-6609(2016)11-0024-05
廖健林(19 9 4-),男,廣東佛山人,本科,研究方向為嵌入式Li n u x開發。
*通信作者簡介:劉燕(19 8 9-)女,湖南永州人,助理實驗師,碩士,研究方向為控制技術。
2 0 16年廣東省大學生創新訓練項目,項目編號:2 0 16 10 58 2 0 2 3;嘉應學院自然科學研究項目,項目編號:3 14E2 3。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
