基于四元數的三維坐標變換解析解的改進
2016-01-26 02:28:14呂志鵬伍吉倉
測繪通報 2015年6期
呂志鵬,伍吉倉,2
(1. 同濟大學測繪與地理信息學院,上海 200092;
2. 現代工程測量國家測繪地理信息局重點實驗室,上海 200092)
Improvement of Three-dimensional Coordinate Transformation Analytic
Solution Based on Quaternion
LV Zhipeng,WU Jicang
?
基于四元數的三維坐標變換解析解的改進
呂志鵬1,伍吉倉1,2
(1. 同濟大學測繪與地理信息學院,上海 200092;
2. 現代工程測量國家測繪地理信息局重點實驗室,上海 200092)
Improvement of Three-dimensional Coordinate Transformation Analytic
Solution Based on Quaternion
LV Zhipeng,WU Jicang
摘要:利用單位四元數構造三維坐標變換最小二乘解析解的過程,具有非迭代、穩定性強等特征。然而,它并不適用于左右手坐標系之間的變換。本文在已有的基于四元數的三維坐標變換解析算法基礎上進行改進,使其適合于左右手坐標系之間的變換。同時,利用實際工程案例對其有效性進行了驗證。
關鍵詞:三維坐標變換;解析法;單位四元數;左右手坐標系
一、引言
在工程測量、攝影測量、機器視覺等領域,經常需要進行大旋轉角三維坐標變換。目前,大旋轉角三維坐標變換的解法分為兩類:迭代法[1-3]和解析法[4-9]。其中,迭代法將旋轉矩陣分別構造為正交矩陣形式[1]、單位四元數形式[2]和歐拉角形式[3],然后建立牛頓迭代格式求解三維坐標變換參數。解析法采用分布最優的策略,首先求解尺度參數,然后分別利用SVD分解法[4-5]、正交矩陣法[6]、單位四元數法[7-8]對旋轉矩陣進行求解,最終獲得平移參數。特別地,對偶四元數法[9]可以對旋轉矩陣和平移參數進行同步求解。與迭代法相比,解析法不需要初值,計算效率高,對退化點集的魯棒性好。但是,解析法中的單位四元數法并不適合于左右手坐標系之間的變換,這極大地限制了它在工程測量等領域的應用。為此,本文首先分析了造成這種情況的原因,并提出了解決方案。
二、算法原理
Horn B K P于1987年提出了應用單位四元數構造三維坐標變換解析解的算法[8]。下面對其原理進行簡介。對于一組對應點集{pi}和{qi},i=1,2,…,N。構造三維坐標變換模型
qi=T+kRpi
(1)
式中,T為平移參數;k為尺度參數;R為旋轉矩陣。為了計算參數最優解將點集{pi}變換到點集{qi},需要建立如下目標方程
(2)
將對應點集{pi}和{qi}進行中心化,有
(3)
(4)
將式(3)代入目標方程式(2)并整理得

(5)
考慮到式(4),可知式(5)中第2項為零。因而,式(5)保留了第1項和第3項。由于此時僅第3項含有平移向量T并且第3項非負。為了讓式(5)取得最小值,可先令第3項為零對目標方程進行分步最優化,即

(6)
此時目標方程簡化為
(7)
為使對應點集正逆變換保持對稱性[7-8],可將目標方程式(7)改寫成對稱形式,有
(8)
將式(8)展開得
(9)
式(9)中第1項和第3項含有尺度參數k,此時令它們之和為零,得
(10)
至此,為了讓目標方程取得最小值,有
(11)
對式(11)進行變形,得

(12)

兩個坐標系之間的定向關系,包括旋轉變換和左右手指向變換。因而,將同時描述這兩種變換關系的矩陣稱為定向矩陣。
當對應點集僅存在旋轉變換時,式(12)的最大值為矩陣N的最大正特征值,最大正特征值所對應的特征向量就是最優旋轉矩陣所對應的單位四元數[8]。設其為q=[q0q1q2q3],可構造如下旋轉矩陣
(13)
如圖1所示,給出了左右手坐標系的關系示意圖。在僅考慮兩個坐標系之間左右手指向的變換時,可得定向矩陣
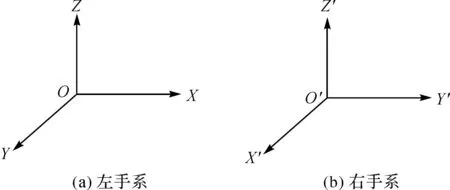
圖1 左右手坐標系關系
(14)
將式(14)代入式(12),得式(11)的變型

(15)
因此,當對應點集存在左右手指向變換時,式(15)的最大值為矩陣N的最小負特征值,最小負特征值所對應的特征向量就是最優旋轉矩陣所對應的單位四元數。然后,根據式(13)求得旋轉矩陣。同時,結合式(15)可知,最終得到定向矩陣
O=-R
(16)
三、實例分析
本文采用文獻[1]中廣州新機場航站樓網架中一個構件的節點坐標數據進行改進算法驗證。在這個實例中目標坐標系(設計坐標系)軸的指向為:X向北、Z向東、Y向上,原點為構件端點鉸的中心。原坐標系(測量坐標系)軸的指向為:x向北、y向東、z向上,原點任意假設。因此,兩個坐標系之間存在左右手指向的變換。采用本文改進的算法,17個公共點全部參加三維坐標變換的計算,得到尺度因子為u=1.002 031 772 2,平移參數為(ΔX,ΔY,ΔZ)=(-109 110.884,-101 335.296,-96 497.345),旋轉矩陣為

單位權中誤差σ0=8.16 mm。同時,采用將文獻[1]中的條件方程轉換為偽觀測方程的方法并利用其數學模型計算三維坐標變換參數。
利用本文改進的算法和文獻[1]中的算法完成三維坐標變換并將實測的坐標轉換為設計坐標,與已知設計坐標的較差見表1。
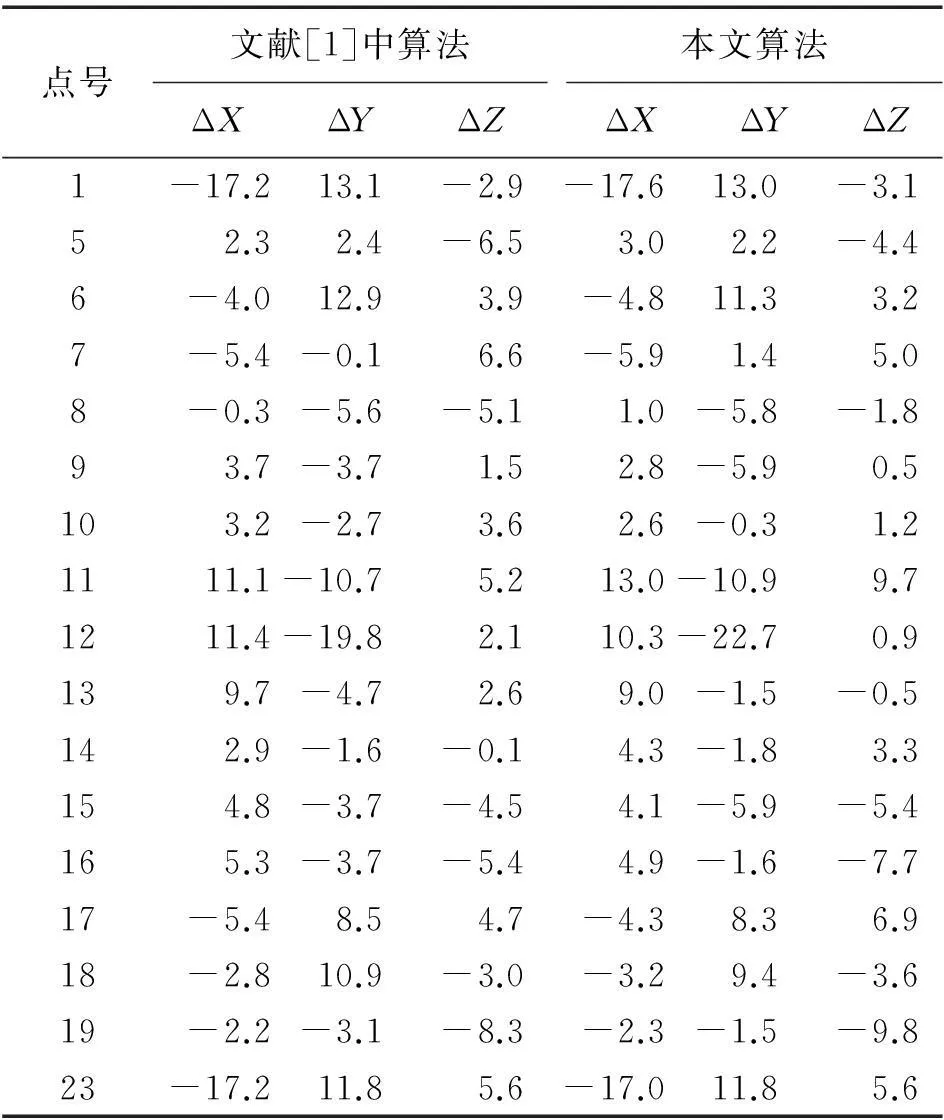
表1 轉換后的坐標較差 mm
從表1中可知,利用本文算法計算的X、Y、Z方向的坐標較差與文獻[1]中的算法計算的坐標較差互差絕大部分都保持在3 mm以內,說明兩種算法具有很好的一致性;同時,兩種算法計算的坐標較差結果也主要集中在10 mm以內,反映出兩種算法對數據均具有很好的擬合。可以說,本文所作的算法改進適用于左右手坐標系變換。
四、結束語
在工程測量、攝影測量、機器視覺等領域需要進行大旋轉角的三維坐標變換。基于四元數的三維坐標變換的解析解法能夠非迭代、穩定地求解大旋轉角三維坐標變換問題。然而,現有算法并不適合于左右手坐標系之間的變換,本文對其進行了改進。同時,利用工程案例對改進算法作了驗證,證明了改進算法的有效性,表明其具有實際應用性。
參考文獻:
[1]陳義, 沈云中, 劉大杰. 適合于大旋轉角的三維基準轉換的一種簡潔模型[J]. 武漢大學學報:信息科學版, 2004, 29(12): 1101-1105.
[2]趙雙明, 郭秋燕, 羅研, 等. 基于四元數的三維空間相似變換解算[J]. 武漢大學學報:信息科學版, 2009, 34(10): 1214-1217.
[3]姚宜斌, 黃承猛, 李程春, 等. 一種適用于大角度的三維坐標轉換參數求解算法[J]. 武漢大學學報:信息科學版, 2012, 37(3): 253-256.
[4]ARUN K S, HUANG T S, BLOSTEIN S D. Least-squares Fitting of Two 3-D Point Sets[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9(5): 698-700.
[5]UMEYAMA S. Least-squares Estimation of Transformation Parameters between Two Point Patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1991, 13(4): 376-380.
[6]HORN B K P, HILDEN H M, NEGAHDARIPOUR S. Closed-form Solution of Absolute Orientation Using Orthonormal Matrices[J]. Journal of the Optical Society of America A, 1988, 5(7): 1127-1135.
[7]HORN B K P. Closed-form Solution of Absolute Orientation Using Unit Quaternions[J]. Journal of the Optical Society of America A, 1987, 4(4): 629-642.
[8]SHEN Y Z, CHEN Y, ZHENG D H. A Quaternion-based Geodetic Datum Transformation Algorithm[J]. Journal of Geodesy, 2006, 80(5): 233-239.
[9]WALKER M W, SHAO L, VOLZ R A. Estimating 3-D Location Parameters Using Dual Number Quaternions[J]. CVGIP: Image Understanding, 1991, 54(3): 358-367.
[10]LORUSSO A, EGGERT D W, FISHER R B. A Comparison of Four Algorithms for Estimating 3-D Rigid Transformations[C]∥Proceedings of the 1995 British Conference on Machine Vision. UK: BMVA Press Surrey, 1995: 237-246.
[11]譚駿祥, 李少達, 楊容浩. 基于非迭代與迭代法聯合估計的七參數坐標轉換方法研究[J]. 大地測量與地球動力學, 2014, 34(1): 131-134, 138.
引文格式: 呂志鵬,伍吉倉. 基于四元數的三維坐標變換解析解的改進[J].測繪通報,2015(6):9-11.DOI:10.13474/j.cnki.11-2246.2015.0166
作者簡介:呂志鵬(1988—),男,碩士,助理工程師,主要研究方向為精密工程測量與變形監測。E-mail:lvzhipeng2007@gmail.com
基金項目:中美國際合作項目(2010DFB20190);國家自然科學基金(41074019)
收稿日期:2014-06-17
中圖分類號:P226.3
文獻標識碼:B
文章編號:0494-0911(2015)06-0009-03