基于STC15W4K的自動避障四軸飛行器設計
2016-01-20 06:52:37李承駿商凱迪朱凱飛
科學家 2015年12期
李承駿 商凱迪 朱凱飛
摘要:本文設計的四軸飛行器控制CPU采用STCl5W4K32S4單片機,充分利用其接口和存儲資源豐富的特點,通過超聲波傳感器與氣壓計檢測飛行器的飛行高度、陀螺儀檢測飛行器的平衡狀態、GPS實現導航,結合藍牙無線電路收發數據,并使用PID算法對飛行器進行飛行控制計算,設計出能夠實現自動避障導航功能的四軸飛行器。多次飛行試驗表明自動避障導航系統能較好地執行飛行任務,達到既定設計目標。
關鍵詞:四軸飛行器;STCl5W4K;自動避障;導航
中圖分類號V2 文獻標識碼A 文章編號2095-6363(2015)12-0065-01
1.系統總體架構
四軸飛行器自動避障導航系統包括機載控制系統平臺和地面站遙控平臺及地面站監測平臺。機載系統通過無線模塊與地面站遙控平臺和檢測平臺進行通信。機載控制系統包括無線模塊、藍牙模塊、超聲波避障模塊、陀螺儀模塊、飛控板、GPS定位模塊、電機信號功率放大電路、STCl5W4K32S4主處理器模塊等。地面站遙控平臺主要由藍牙模塊、輸入模塊以及處理器模塊組成;地面站監測平臺主要由無線模塊、顯示模塊以及處理器模塊組成。
本文設計的四軸飛行器,要求能夠實現如下功能。
1)通過自制的地面站遙控平臺控制飛行器按一般飛行器的飛行模式飛行外,還能夠切換到定點模式和自動避障導航模式。
2)能夠利用地面站遙控平臺發送目標地點的經緯度數據給飛行器。
3)當切換到自動避障導航模式后,飛行器能夠自動繞開障礙物順利到達目標位置后平穩降落。
4)能夠通過地面數據監測站查看當前飛行器的狀態數據,包括前方、上方和下方障礙物的距離,當前經緯度及前傾(俯仰)、側傾(翻滾)、油門和偏航信號的大小。
2.系統的硬件設計
四軸飛行器地面站遙控平臺、地面站監測平臺及機載系統硬件設計分別介紹如下。
1)地面站遙控平臺硬件組成部分有STC89C52單片機最小系統、穩壓電源電路、雙搖桿手柄模塊、PCF8591A/D轉換模塊、藍牙通訊模塊等模塊。
2)地面站監測平臺硬件組成部分有STC89C52單片機最小系統、穩壓電源電路、12864液晶顯示模塊、無線通訊模塊等模塊。
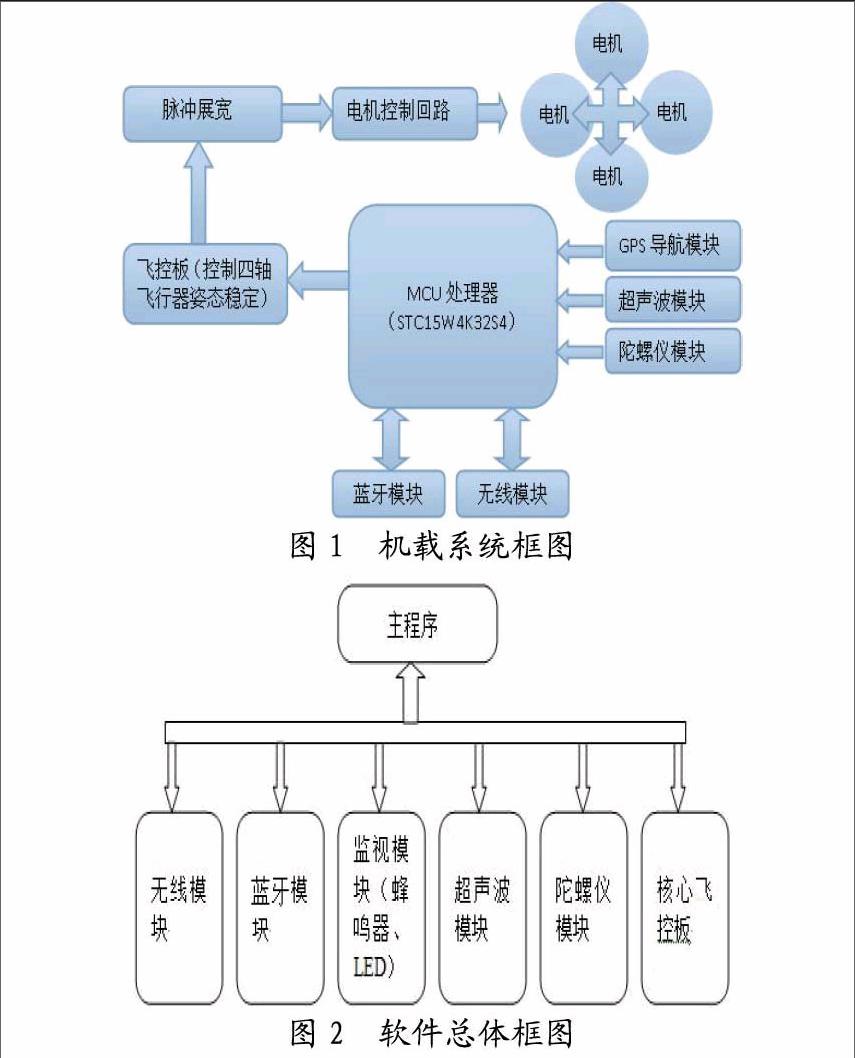
3)機載系統硬件組成部分有四軸飛行器飛行系統及電子控制系統等模塊,其中電子控制系統主要由STCl5W4K32S4單片機最小系統、機載電池、穩壓電源電路、ARM飛控板、GPS、超聲波、陀螺儀、藍牙、無線等模塊組成。機載系統組成框圖如圖1所示。
3.系統的軟件設計
本系統軟件設計采用模塊化編程思想,將系統復雜的功能分解成功能單一、接口簡單、結構清晰、容易理解的功能子程序模塊,然后由主程序按照規定順序流程調用子程序,方便調試和修改。軟件總體框圖如圖2所示。
機載系統上電后首先進行初始化:GPS開關復位為打開,超聲波定高開關復位為關閉,LED燈關斷,PWM輸出端口初始化為低,超聲波12C串行總線初始化為空閑狀態,串口初始化內容包括設置串口通信方式為方式1,波特率為9600,1位停止位,無校驗位。初始化完成后進入大循環中,首先進行判斷串口一幀數據是否接收完成,如果接收完成則處理一幀數據,否則進入判斷超聲波定高是否打開,如果超聲波打開則進行超聲波定高處理,否則進入PWM初值轉載判斷環節,若上一次初值裝載完成,則進行初值重新裝載,否則等待PWM初值裝載完成。
為實現自動避障導航功能,需要對障礙物進行距離測量,對反饋數據處理后送入飛控處理,由飛控發出飛行姿態調整的指令,并向地面站發送數據,循環進行,完成飛行任務。飛行流程如圖3所示。
4.實驗情況
完成后的系統實物如圖4所示。經實際試飛實驗,該系統能夠實現自動避障功能,較好地執行了飛行任務,達到了既定設計目標。
5.總結
本文基于STCl5W4K32S4單片機,利用其豐富的集成功能,采用模塊化的硬件設計思想和模塊化的軟件編程思想,完成了自動避障系統的硬件和軟件設計,實現了飛行器自動導航與避障功能。考慮到四軸飛行器廣闊的應用前景,該設計有著良好的實用價值和應用前景。
