北斗衛星導航系統偽距差分定位技術研究
2016-01-20 08:53:31李明峰吳繼忠
全球定位系統 2015年2期
戴 偉,李明峰,吳繼忠
(南京工業大學測繪學院,江蘇 南京 211816)
北斗衛星導航系統偽距差分定位技術研究
戴偉,李明峰,吳繼忠
(南京工業大學測繪學院,江蘇 南京 211816)
摘要:闡述了北斗衛星導航系統(BDS)偽距差分定位模型,比較了該模型與GPS偽距差分定位模型的差異。結合實例對BDS和GPS的基線解算進行了比較,分析了兩模型基線解算結果的精度,發現偽距差分能達到亞米級至米級的精度,可為BDS地基增強建設提供新思路;并探討了BDS衛星可見數對偽距差分定位的影響,得出有益的結論。
關鍵詞:北斗衛星導航系統;偽距;差分;基線解算;精度
doi:10.13442/j.gnss.1008-9268.2015.02.008
中圖分類號:P228.4
文獻標志碼:: A
文章編號:: 1008-9268(2015)02-0036-04
收稿日期:2015-02-09
作者簡介
Abstract:The model of BDS pseudorange differential positioning is introduced, and the differences between BDS and GPS for pseudorange differential positioning are discussed. Through two examples of baseline solving, it is proved that the precision on a level of meter and even sub-meter may be reached with BDS for pseudorange differential positioning which is beneficial for the development of BDS ground based augmentation system. Furthermore the influence of the number of visible satellites on the precision is discussed and some beneficial conclusions are made
0引言
北斗衛星導航系統(BDS)與美國的GPS、俄羅斯的GLONASS以及歐盟的Galileo并列為全球四大導航定位系統。北斗衛星導航系統正在高速發展,至2012年實現了向亞太的大部分地區提供定位、導航、授時以及短報文通信服務功能[1],且具有特有的短報文通信功能。
目前,多個省市正在推進北斗地基增強系統的建設,以滿足相關行業和大眾用戶對米級和亞米級定位的需求。當前的主要研究集中在使用載波進行精密解算,需解算整周未知數,存在觀測值出現周跳等多種因素的影響;對于精度要求不高、要求實時定位或者快速定位的應用,GPS偽距差分定位已能滿足要求[1]。本文對BDS偽距差分定位進行研究,分析BDS與GPS的時間系統和坐標系統的異同及其對偽距差分定位的影響,對2條基線分別使用BDS和GPS進行偽距差分解算,對比分析BDS和GPS偽距差分結果的差異性。
1時間系統和坐標系統
BDS采用的北斗時(BDT)與GPS的GPS時間均為協調世界時(UTC),兩者解算的時間起點不同。BDT的起始歷元為2006年1月1日協調世界時00時00分00秒,時間不閏秒,連續累計[3-4];GPS時間的起始歷元為1980年1月6日協調世界時00時00分00秒,時間不閏秒,連續累計。經計算BDS周與GPS周相差1 356周,BDS秒與GPS秒相差14 s.
BDS采用的坐標系是2000中國大地坐標系(CGCS2000)。與GPS的WGS-84坐標系一樣,CGCS2000也是協議地球坐標系。該坐標系的原點位于地球質心,Z軸指向IERS定義的參考極(IRP)方向,X軸為IERS定義的參考子午面(IRM)與通過原點且與Z軸正交的赤道面的交線,Y軸與Z、X軸構成右手坐標系。WGS-84與CGCS2000的精度差異為厘米級[5]。因此,本文研究條件無須進行坐標系轉換。
2基線解算模型
偽距定位觀測方程為[6-8]

(1)

將式(1)線性化得

(2)
資助項目: 南京市科技發展計劃項目(編號:2014sc331065)
聯系人: 戴 偉E-mail:daiwei2013@live.com
式中: ρ′i同式(1)表示偽距觀測值;

設有S、T兩測站,i時刻的觀測方程分別為

(3)

(4)
式(3)與式(4)相減,可消除衛星鐘差影響。對于較短基線,可認為i時刻S站與T站的電離層與對流層誤差相同。所以,得

(5)
同理,可得j時刻S站與T站的單差觀測方程。將i時刻與j時刻兩測站單差觀測方程相減,即得偽距雙差觀測方程為


(6)
若S站為基準站,則其坐標改正數為零。式(6)簡化為
(7)
上式只含有與待定點T坐標相關的未知數dXT,dYT,dZT.進一步整理式(7)可得形如V=B[dXTdYTdZT]T-L的形式,從而可方便地通過平差計算獲得待定點T的坐標。
3實例分析
選用司南導航官方網站(http://www.comnav.cn)提供的約17km北斗/GPS/GLONASS三系統基線的觀測數據進行驗證。該數據由司南K508GNSS板卡采集,采集時間為2014年7月1日,數據文件格式為rinex3.02,觀測文件中歷元的間隔為10s.
選取C1類型觀測值,采用華測公司的CGO軟件進行Lc固定解基線解算,并以Lc固定解為基線參考值。利用MATLAB對該數據進行偽距差分計算,將偽距差分結果與基線參考值求差,分別用Dx,Dy,Dz表示。分別對GPS和BDS數據的解算結果如圖1.可以看出,GPS偽距差分結果良好,三軸誤差最大不超過8m,且主要在2 ~3m的范圍;北斗偽距差分結果優于GPS結果,三軸方向誤差主要為亞米級,且穩定性相對較高。

圖1 GPS與BDS基線解算三軸誤差
圖2示出了GPS和BDS衛星可見數。可以看出,BDS衛星數變化較穩定;GPS衛星可見數多于BDS衛星可見數,但其衛星可見數變化大,從而導致偽距差分結果穩定性比BDS差。對照圖1不難發現,變化較大的Dx,Dy,Dz發生在衛星可見數變化之處,衛星可見數對偽距差分存在一定的影響。

圖2 GPS與BDS衛星可見數
表1示出了GPS和BDS的基線解算結果。從表中可以看出,BDS偽距差分定位的穩定性高于GPS.與Lc參考值相比,BDS和GPS偽距差分定位的精度并不很低,表明在合適的條件下偽距差分也能得到較好結果。

表1 GPS和BDS基線解算結果
此外,對1條約77 km的基線進行解算。衛星可見數如圖3所示,由于受天氣等多種因素的影響,存在短時間內不能收到某顆衛星信號的情況。以北斗為例,圖3中400歷元至1 000歷元間北斗的衛星可見數主要為8顆,但存在部分歷元衛星可見數的變化。
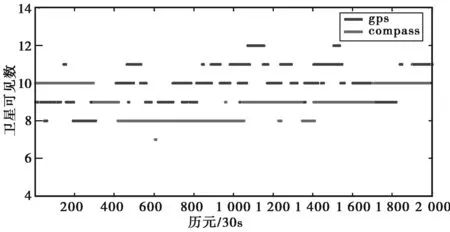
圖3 GPS與BDS衛星可見數
圖4是分別采用GPS和BDS進行基線解算的三軸誤差結果圖。可以看出,在100歷元之前的某些歷元,BDS三軸誤差較大,由圖3可知在該歷元附近北斗的衛星可見數發生了變化。從整體上看,GPS偽距差分的穩定性優于BDS.GPS衛星數目基本在10 ~11顆,而BDS衛星數目則不很穩定。BDS偽距差分基本能保持與GPS相同的精度,即接近亞米級。
基線解算的結果如表2所示,發現北斗與GPS的結果相近。北斗偽距差分的中誤差比GPS大,說明北斗在穩定性方面不如GPS.
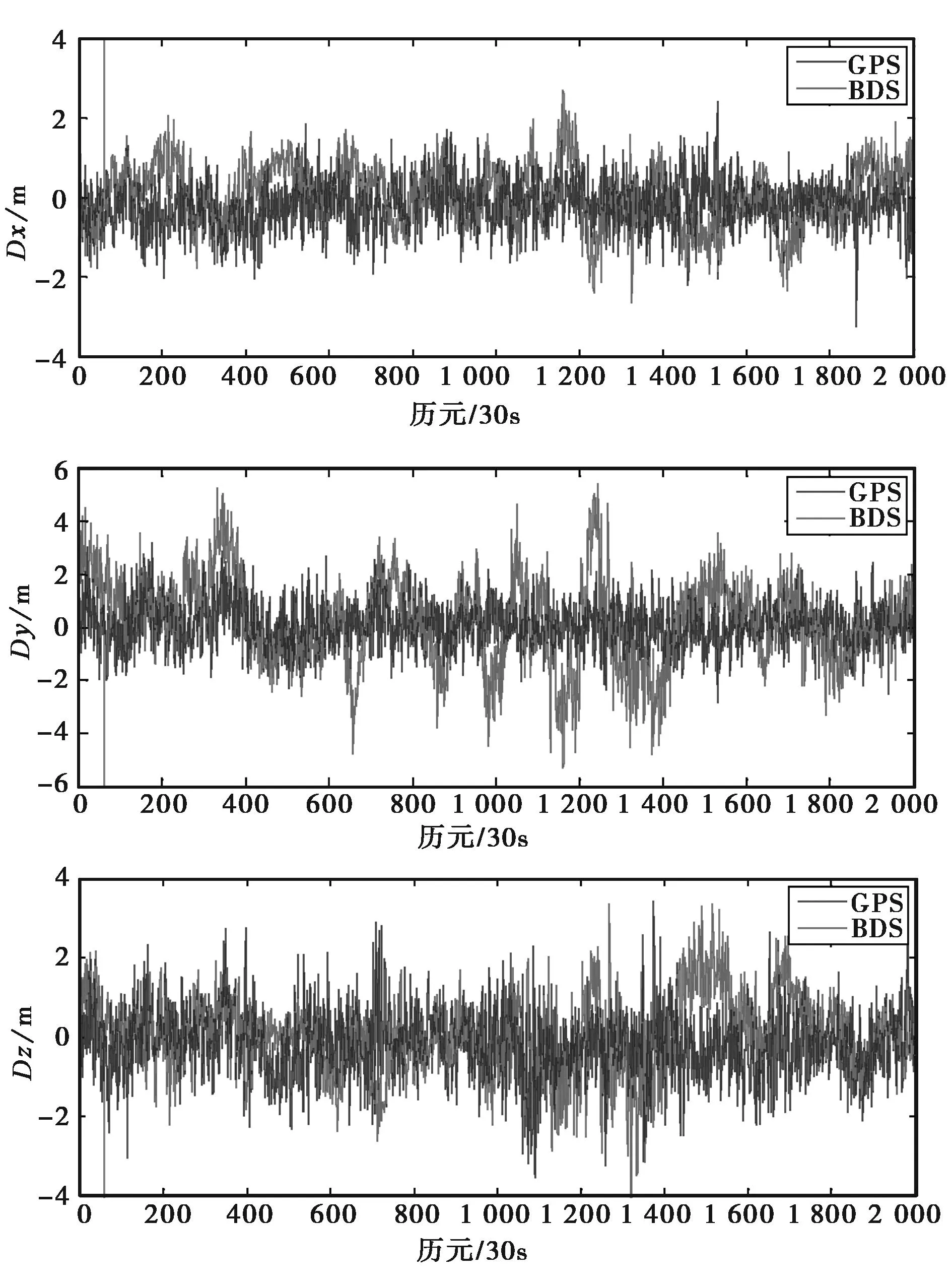
圖4 GPS與BDS基線解算三軸誤差

表2 GPS和BDS基線解算結果
4結束語
本文探討了BDS偽距差分定位模型,對兩條典型基線進行偽距差分計算和對比分析,得出如下結論:
1) 在短基線的合適條件下,BDS與GPS偽距差分均能達到亞米級的定位精度。
2) 在定位精度要求不高的情況下,可采用偽距差分定位代替載波相位差分定位,提高工作效率。同時,偽距差分定位結果可為整周模糊度解算提供參考[9]。
3) 衛星可見數對偽距差分結果存在較大影響[10]。當BDS與GPS衛星可見數變化相近時,由于GPS衛星可見數多于BDS衛星可見數,GPS結果精度相對較高和穩定;若GPS衛星可見數變化相對較大,BDS結果精度相對較高和穩定。
參考文獻
[1] 范龍, 柴洪洲. 北斗二代衛星導航系統定位精度分析方法研究[J]. 海洋測繪, 2009, 29(1): 25-27.
[2] 蘭孝奇,張兵良,黃繼紅,等. GPS偽距差分定位技術的試驗研究[J]. 河海大學學報·自然科學版,2004,32(3):300-303.
[3] 中國衛星導航系統管理辦公室. 北斗衛星導航系統空間信號接口控制文件公開服務信號(2.0版)[R]. 中國衛星導航系統管理辦公室,北京,2013.
[4] 中國衛星導航系統管理辦公室.北斗衛星導航系統公開服務性能規范(1.0版)[R]. 中國衛星導航系統管理辦公室,2013.
[5] 陸亞峰, 樓立志, 馬緒瀛, 等. 北斗與 GPS 組合偽距單點定位精度分析[J]. 全球定位系統, 2013, 38(6): 1-6.
[6] 魏子卿, 葛茂榮. GPS相對定位的數學模型[M]. 測繪出版社, 1998.
[7] 徐紹銓,張華海, 楊志強, 等. GPS 測量原理及應用[M]. 武漢大學出版社, 2003.
[8] 唐衛明, 鄧辰龍, 高麗峰. 北斗單歷元基線解算算法研究及初步結果[J]. 武漢大學學報·信息科學版, 2013, 38(8): 897-901.
[9] 廖遠琴, 邱蕾, 李曉東, 等. GPS 偽距雙差方法比較分析[J]. 上海地質, 2008 (2): 43-46.
[10]劉季, 張小紅. GPS/BD 組合導航定位試驗和精度分析[J]. 測繪信息與工程, 2012, 37(4): 1-3.
戴偉(1990-),男,碩士生,主要從事衛星導航定位及其應用研究。
李明峰(1964-),男,博士,教授,碩士/博士生導師,主要從事測繪數據處理研究。
吳繼忠(1981-),男,博士,副教授,碩士生導師,主要從事GPS衛星定位技術應用。
Research on the Technology of BDS Pseudorange
Differential Positioning
DAI Wei,LI Mingfeng,WU Jizhong
(CollegeofGeomaticsEngineering,NanjingTechUniversity,Nanjing211816,China)
Key words: BDS; pseudorange; differential; baseline solving; precision
