基于數據融合濾波算法的EMA故障自修復策略
2016-01-19 03:30:45
西北工業大學學報 2015年2期
?
基于數據融合濾波算法的EMA故障自修復策略
周勇1,王嫚1,劉奇1,張超1,張舉中2
(1.西北工業大學航空學院,陜西西安710072; 2.中船重工第713研究所,河南鄭州450015)
摘要:為了提高雙余度機電作動器(EMA)伺服系統的可靠性和容錯能力,分析了EMA系統中永磁無刷直流電機用線性可變差動變壓器(LVDT)和旋轉可變差動變壓器(RVDT)及其輔助電路的故障在線自修復技術,提出了一種基于數據融合濾波算法的故障自修復控制策略。該方法可快速定位故障點,實現EMA伺服系統的故障檢測與隔離(FDI),并對故障數據進行重組。該方法可有效提高EMA的可靠性、壽命和可維護性,滿足EMA伺服系統的發展要求,推動其故障預測與健康管理的理論研究及技術應用進程。
關鍵詞:數據融合;濾波; EMA;故障檢測;故障自修復
以永磁無刷直流電機為基礎的機電伺服系統被廣泛應用于航空航天領域的功率電傳操縱中,其核心部件機電作動器(electro-mechanical actuator,EMA)是操縱系統中的重要子系統之一,同時又是故障的高發環節。余度技術是提高EMA可靠性的一種最為有效的控制方法,對余度問題的研究主要經歷了硬件余度、解析余度、自修復方法、故障預測與健康管理(prognostics and health management,PHM) 4個階段[1-2]。
本文提出了一種雙余度EMA轉子位置傳感器和位移傳感器失效后的自修復策略,該EMA采用電氣雙余度,即包含2臺永磁電機,每臺電機具有各自獨立的測量與控制系統,EMA輸出端安裝2個直線位移傳感器(LVDT)。本文提出的自修復策略為:若某一余度電機的轉子位置傳感器(RVDT)失效,則根據另一余度的RVDT信號進行基于數據融合濾波算法的轉子位置信號重構;若全部失效,則根據推測算法進行估計。該方法可有效提高EMA的可靠性、壽命和可維護性,滿足EMA伺服系統的發展要求,推動其故障預測與健康管理的理論研究及技術應用進程。
1 數據融合濾波自修復系統
在文獻[3]的基礎上,本文設計的數據融合濾波自修復系統由3個濾波器(RVDT濾波器、LVDT濾波器和母線電流傳感器濾波器),3個相應的故障檢測與隔離(fault detection and isolation,FDI)模塊,1個vω估計器、1個推測模塊和1個數據融合模塊組成,如圖1所示。

圖1 數據融合濾波系統結構圖
數據融合系統的工作過程如下: RVDT濾波器根據傳感器輸出數據計算EMA中永磁電機的速度v和角速度ω,其FDI模塊實時檢測傳感器輸出值是否失效。若某一余度電機的RVDT失效(如某個電機傳感器發生故障),則根據另一個有效的RVDT濾波器的預測值進行校正;若全部失效,則將vω估計器的輸出值送入推測模塊。推測模塊根據EMA的速度信息,以及上一時刻的狀態推算出當前的狀態^xD,并將其作為預測值^x-U輸入到LVDT濾波器。電流傳感器濾波器對輸出值進行估計,將估測的雙余度電機轉子角度(^θc和^xUD中的^θUD)進行數據融合;否則^x = ^xUD。
1) RVDTvω濾波器
定義xvω(k) =[v(k),ω(k)]T,

式中,Hvω=,zvω(k) =[Ul(k),Ur(k)]T,Ul(k)和Ur(k)分別為雙余度電機各自的RVDT的測量值,wvω和vvω滿足均值為零、相互獨立和服從高斯分布的統計特性。
2) vω估計器

式中,b為遺忘因子,通常0<b<1。
3)推測模塊
定義xD(k) =[xD(k),yD(k),θD(k)]T,則推測模塊的推算方程可表示為
式中,T為采樣周期。
4) LVDT濾波器
EMA的狀態方程和測量方程可寫為

5)電流傳感器濾波器
電流傳感器濾波器是1個向量濾波器,定義xc(k) =θc(k),則

由于實際中電流傳感器的采樣周期為125 ms,LVDT 和RVDT的采樣周期為25 ms,故取Δxc=^θUD(k)-^θ(k-5)。wc和vc滿足均值為零、相互獨立和服從高斯分布的統計特性。
6) FDI模塊
FDI現已發展成為一項專門的技術,常用的FDI方法有基于硬件余度的方法[4]、基于解析余度的方法[5-6]和基于人工智能的方法[7-8]。其中基于解析余度的方法因具有成本低和計算簡單等優點而被廣泛應用于卡爾曼濾波的監測中。在數據融合領域,常用的檢驗方法有狀態χ2檢驗和新息珓z(k) (珓z(k) =z(k)-h(^x-(k) )或珓z(k) =z(k)-H^x-(k) )χ2檢驗,本文主要討論后者。
文獻[6]已證明,當無故障發生時,卡爾曼濾波器的新息珓z(k)為零均值高斯白噪聲,其方差為

當系統出現故障時,新息珓z(k)的均值就不再為零了。因此,可以通過對新息的均值檢驗來確定系統是否發生故障。本文將引入多元統計分析的1個結論來對新息的均值進行檢驗。
根據文獻[9],設X1,X2,…,Xn為來自均值為μ,協方差陣為正定陣Σ的總體的1個隨機樣本。當n-p很大時,對所有的a,aT珚X±包含aTμ的概率近似為1-α。因此,我們有100(1-α) %的聯合置信表示
在本文涉及的3個FDI模塊中,均取珋xi= 0,=。通過上述新息的χ2檢驗,我們可以判斷出發生故障的具體傳感器,便于故障的隔離和系統的重構。
對于RVDTvω濾波器,若判斷出其中1個傳感器失效,如左電機傳感器故障,則可重組測量方程,利用右電機傳感器的有效信息對預測值進行校正,即

式中,xvω(k) =[v(k),ω(k)]T,zvω(k) = vr(k),Hvω=[1d ] ;若右電機傳感器故障,則zvω(k) = vl(k),Hvω=[ 1-d ]。若2個RVDT同時失效,則將vω估計器的輸出值送入推測模塊。
同理,對于LVDT濾波器,若判斷出1#傳感器失效,則可隔離1#的測量信息,僅利用2#的信息對預測值進行校正,即

若判斷出2#失效,則:

對于電流傳感器濾波器,因為只有1個測量通道,所以沒有測量方程重組的問題。其FDI模塊主要是為是否進行數據融合提供判斷依據。
7)數據融合模塊
針對本文的數據融合模塊

其中選取P1為LVDT濾波器狀態方差第3行第3列的元素,P2為電流傳感器濾波器的狀態方差。
2 仿真驗證
為了驗證本文提出的數據融合濾波算法的有效性,針對RVDT失效的情況,在Matlab中進行了仿真。EMA全行程仿真600 mm,電流傳感器的測量方差rc=0. 01。
為了驗證RVDT失效時數據融合濾波的性能,仿真過程按照下列方式引入干擾:
即在第Ⅰ階段,1#RVDT失效;在第Ⅱ階段,2#RVDT失效;在第Ⅲ階段2個RVDT均失效。此外,取α= 0. 1,即(0. 1) = 4. 61。仿真結果如圖2和圖3所示。
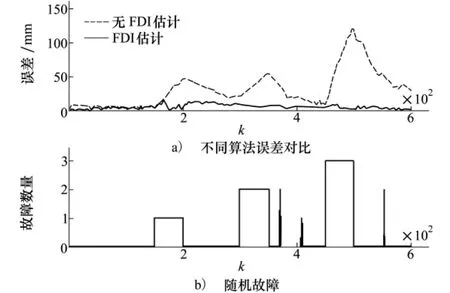
圖2 RVDT失效下基于數據融合濾波算法的直線位移估計
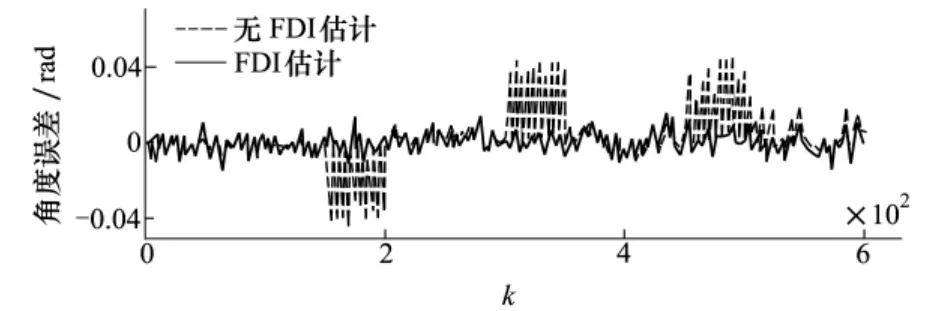
圖3 RVDT失效下基于數據融合濾波的角位置估計
圖中的短虛線(無FDI估計)表示采用非數據融合方法的狀態估計值或估計誤差,長虛線(FDI估計)表示采用數據融合濾波方法的狀態估計值或估計誤差。故障數量(fn)為FDI模塊的輸出值,含義如下: fn= 0,表示無失效現象; fn= 1,表示1#RVDT失效; fn= 2,表示2#RVDT失效; fn= 3,表示2個RVDT均失效。
從圖2和圖3中可以看出,當仿真進行到第150 ~200步時,基于數據融合濾波的方法可以迅速檢測出1#RVDT失效(fn= 1),對RVDT的測量方程進行重組,在vω濾波器中僅利用2#RVDT的有效信息對預測值進行校正;當仿真進行到第300~350步時,數據融合濾波方法可以快速檢測出2#RVDT失效(fn= 2),在vω濾波器中僅利用1#RVDT的輸出值對預測值進行校正;當仿真進行到第450~500步時,數據融合濾波方法可以立刻檢測出2個RVDT均失效(fn= 3),將vω估計器的輸出值送入推測模塊。由此可見,數據融合濾波利用FDI模塊可以檢測并隔離無效的錯誤信息,盡量確保狀態估計的精度,使位置估計誤差始終保持在1. 7%以內,角度估計誤差維持在0. 01 rad左右;而非數據融合由于無FDI模塊,引入了錯誤的測量信息,導致估計精度大幅下降,位置估計誤差在單RVDT失效時達到8%,在雙RVDT失效時,誤差超過20%,角度估計精度也只有0. 04 rad。
3 結論
本文針對雙余度EMA系統可靠性與容錯性能,結合故障檢測與隔離技術和系統重構的思想,設計了一種數據融合濾波系統。并在假定RVDT失效的情況下,通過Matlab對該方法進行了仿真。結果表明,本文提出的數據融合濾波系統在有效提升EMA系統可靠性的同時,大大提高了系統的穩定性、精確度和容錯能力。
參考文獻:
[1]Cieslak J,Henry D,Zolghadri A.Development of an Active Fault-Tolerant Flight Control Strategy[J].Journal of Guidance,Control,and Dynamics,2008,31(1) : 135-147
[2]Ducard G,Geefing P H.Efficient Nonlinear Actuator Fault Detection and Isolation System for Unmanned Aerial Vehicles[J].Journal of Guidance,Control,and Dynamics,2008,31(1) : 225-237
[3]周勇,張玉峰.基于Sage-Husa的線性自適應平方根卡爾曼濾波算法[J].西北工業大學學報,2013,31(1) : 89-93 Zhou Yong,Zhang Yufeng.A Novel Algorithm of Linear Adaptive Square-Root Kalman Filtering based on Sage-Husa[J].Journal of Northwestern Polytechnical University,2013,31(1) : 89-93 (in Chinese)
[4]Bak T,Wisniewski R,Blanke M.Autonomous Attitude Determination and Control System for the Orsted Satellite[C]∥Proceedings of the 1996 IEEE Aerospace Applications Conference,Snowmass,CO,USA,1996: 173-185
[5]Hajiyev C.Innovation Approach Based Measurement Error Self-Correction in Dynamic Systems[J].Measurement,2006,39: 585-593
[6]Mehra R K,Peschon J.An Innovations Approach to Fault Detection and Diagnosis in Dynamic Systems[J].Automatica,1971,7: 637-640
[7]Alessandri A.Fault Diagnosis for Nonlinear Systems Using a Bank of Neural Estimators[J].Computers in Industry,2003,52: 271-289
[8]Borairi M,Wang H.Actuator and Sensor Fault Diagnosis of Non-Linear Dynamic Systems via Genetic Neural Networks and A-daptive Parameter Estimation Technique[C]∥Proceedings of the IEEE Conference on Control Applications,1998: 278-282
[9]Johnson R A,Wichern D W.Applied Multivariate Statistical Analysis[M].4th Ed.Upper Saddle River,NJ: Prentice Hall,1998
A Fault Self-Repairing Strategy of EMA Based on Data Fusion Filtering Algorithm
Zhou Yong1,Wang Man1,Liu Qi1,Zhang Chao1,Zhang Juzhong2
(1.College of Aeronautics,Northwestern Polytechnical University,Xi'an 710072,China 2.Institute 713,China Shipbuilding Industry Corporation,Zheng Zhou 450015,China)
Abstract:To enhance the reliability and fault tolerance of the dual-redundant electro-mechanical actuator of a servo system,we analyze the online fault self-repairing techniques of the linear variable differential transformer and rotational variable differential transformer which are used in the permanent magnet brushless DC motor of an electro-mechanical actuator (EMA).We propose what we believe to be its novel fault self-repairing strategy based on the data fusion filtering algorithm.The strategy can accurately and rapidly determine the fault location,realize the fault detection and isolation of the servo system and recombine the data of faulted sensor.It can effectively enhance the reliability,life and maintainability of the EMA,satisfy the requirements of its servo system and quicken the research progress in fault forecast and health management.
Key words:Data Fusion,Filtering Algorithm,EMA,Fault Detection,Fault Self-Repairing
作者簡介:周勇(1978—),西北工業大學副教授,主要從事電氣工程及自動化研究。
收稿日期:2014-09-04基金項目:國家自然科學基金(51207129、61104030、51307137)資助
文章編號:1000-2758(2015) 02-0204-05
文獻標志碼:A
中圖分類號:TP274