一種魯棒高階滑模Super-Twisting算法的全橋逆變器
2016-01-19 03:31:15
西北工業大學學報 2015年2期
?
一種魯棒高階滑模Super-Twisting算法的全橋逆變器
皇甫宜耿,王毅,趙冬冬,梁波
(西北工業大學,陜西西安710072)
摘要:利用高階滑模super-twisting算法設計一種全橋逆變電路的控制器。該算法的核心思想是將離散控制律轉移至更高階的滑模面,從本質上消除一介滑模的抖顫影響。為了驗證算法的可行性和有效性,利用MATLAB仿真軟件對控制系統進行了對比實驗,結果表明: 1)在穩態性能下,相比于典型PI控制高階滑模控制具有更好的跟蹤效果。2)在輸入和負載的擾動情況下,高階滑模控制顯示出強魯棒性,對輸入和負載的擾動不敏感。
關鍵詞:魯棒性;全橋逆變器; super-twisting滑模
風力發電、太陽能發電等新能源受天氣影響大,如風速、風向、日照強度、日照時間等因素干擾,使得發出的電能有很強的間歇性和不確定性。這些新能源特點使得電源變化器輸出穩定電壓變得困難,輸出精度難以保證。此時就需要一種具有魯棒性的控制器。
滑模控制以其結構簡單、對內部參數和外部擾動均不敏感的強魯棒性得到了廣泛應用。然而傳統滑模控制由于自身控制律的離散型存在不可避免的抖顫問題,被控系統將出現高頻振蕩[1-2],影響了滑模控制的效果,嚴重時甚至損毀控制系統。
高階滑模是傳統滑模的推廣,是目前最為全面的、能夠消除傳統滑模的缺陷,并保持了傳統滑模優點的方法。Aire Levant首先提出了高階滑模控制的思想[3],并且系統地提出了幾種二階滑模(second order sliding mode,SOSM)控制算法并給出了控制精度估計。Fridman和Levant闡述了高階滑模原理及應用并得到了國際控制界的廣泛關注[4]。Bartolini教授和他領導的研究小組發表了一系列的關于二階滑模理論與應用的研究成果[5]。Levant提出了基于super-twisting算法的二階滑模微分器,極大地促進了高階滑模理論和應用的發展[6]。Levant的貢獻主要有2個方面:①在2001年提出了任意階滑模控制[7];②于2003年提出了任意階精確魯棒微分器[8]。根據上述兩點可以實現任意階滑模輸出反饋控制。Levant提出的super-twisting算法應用于系統的相對階數為1的情形,不需要滑模變量的導數信息且控制律是連續的; Drift算法是針對離散系統提出來的; prescribed convergence law算法和Man等[9]所提出的終端滑模(terminal sliding mode,TSM)控制方法很相近,利用了傳統滑模控制的思想,讓系統的狀態保持在一個適合的非線性滑模面上,能在有限時間內收斂到滑動集s == 0,從而實現二階滑模控制。Bartolini等[10-11]基于雙積分系統的時間最優控制推導出了sub-optimal(次優)算法。Shtessel等提出了一種漸近收斂的光滑二階滑模(smooth second order sliding mode,SSOSM)控制方法,隨后,又基于齊次性技術提出了另一類新型的光滑二階滑模控制算法,該算法適用于攔截彈的制導律設計[12-13]。Pan針對相對階數為2的線性時不變連續系統,提出了一種漸近收斂的二階滑模控制方法,并采用Lyapunov函數對穩定性進行了分析。Plestan等[14]在有限采樣頻率和只利用輸出信息的情況下,提出了一種新的二階滑模輸出反饋控制方法,在存在不確定性和擾動時,實現了有限時間內對參考軌跡的高精度跟蹤。
本文采用高階滑模中的super-twisting控制算法,并基于此算法設計了一種動態滑模控制器,將其應用于全橋逆變器當中。
1 全橋逆變器的建模
全橋逆變器是一種把直流變交流的開關電源拓補結構。
主要由Q1~Q4,D1~D4以及LC低通濾波器組成:

圖1 全橋逆變器的拓撲結構圖
如圖1所示逆變橋由4個MOSFET管組成,分為2組,其中Q1和Q4為1組,Q2和Q3為1組,2組交替通/斷,D1~D4是續流二極管,輸出交流方波電壓經LC低通濾波器后得到交流正弦輸出電壓。由于全橋型逆變器的輸出濾波電容電壓及其導數是連續可測的,可以取電容電壓及電感上的電流作為系統的相變量來描述系統。系統的狀態方程為:
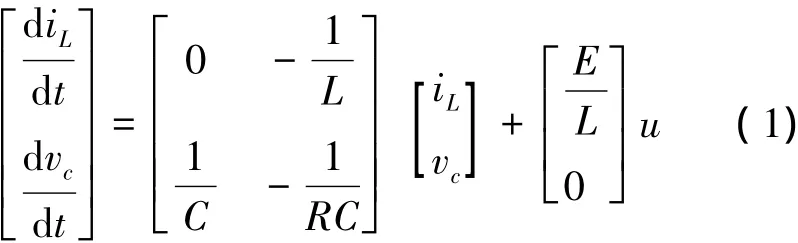
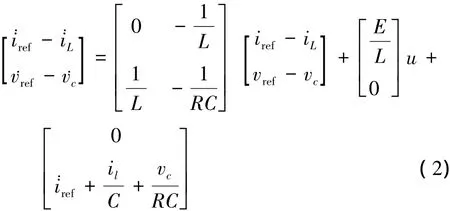
式中,u∈{-1 1}分別代表2組開關的開通/關斷狀態。當u = 1時,代表Q1和Q4導通;當u =-1時,代表Q2和Q3導通,系統狀態方程變為:
2 super-twisting控制算法
二階滑模控制算法由于將離散控制律轉移至更高階的滑模面,消除了傳統滑模控制中存在的抖振問題。super-twisting控制算法是二階滑模控制算法的一種由兩部分組成,第一部分為滑模面在時間上的積分,第二部分為滑模面的一個連續函數。

保證有限時間內收斂于滑模面原點的充分條件是[8]:

式中,W,ρ,λ和s0均為正常數。
當系統與控制律u相關度r≥1時,控制器可以簡化為:
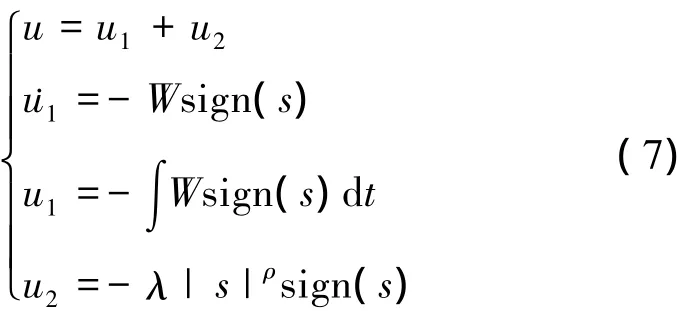
super-twisting算法并不需要任何有關滑模面在時間上的微分的信息。如果在(7)式中ρ取1,系統將達到一個指數穩定的二階滑動模態,如果ρ取0. 5,系統將最大可能實現二階滑動模態。
對于全橋逆變器,采用二階滑模super-twisting算法進行控制,分別設計全橋逆變器的切換函數s和滑動模態控制律u。
滑模存在的條件要求所有滑模面附近的狀態軌跡都指向滑模面。因此,在(2)式確定的相平面上,選擇通過原點的斜率為負的直線作為開關切換面,即:

對于其控制率: u(t) = u1(t) + u2(t),即為u =∫-Wsign(s) dt-λ| s |ρsign(s)
所以控制算法為:
為了證明算法的收斂性,根據李雅普諾夫穩定性判據,構造正定函數

對該函數求導可得如下方程組:
式中: K = iref+ iL/C + U/RC,在相平面中,(12)式表示2條平行線之間的區域。可以得到切換線上的滑模存在域滿足以上2個不等式區域,將(8)式帶入(12)式得:
式中:λ= k1/k2由于輸入電壓E和參考電壓Vref是確定的通過選擇參數λ,R,C,L可以得到不等式:

為了保證狀態軌跡嚴滑模面穩定于坐標原點,就必須使滑模面包含向平面的原點。可得:

(15)式等效控制必須滿足的條件u≤1得到的滑模區域。如給定輸入電壓E = 24 V,濾波電感L = 2. 5 mH,濾波電容C = 2. 43μF,(8)式中的參數k1= 0. 01,參數k2= 12,參考電壓Uref= 220sin2π50t(V),參考電流Iref= 0. 6sin2π50t(A)即可滿足上述不等式,即<0。所以super-twisting算法在有限時間內是收斂的,即全橋逆變器能夠滿足穩定性的要求。
3 實驗結果與分析
為了進一步驗證算法的收斂性和有效性,本文對基于super-twisting算法的全橋逆變器進行了MATLAB仿真,系統所采用的輸入電壓為24 V,電感L=2. 5 mH,電容C = 2. 43 μF,電阻R = 40 Ω,輸出給定電壓Uref=280sin2π50t(V),Iref=0. 6sin2π50t (A)。
根據已知參數建立的數學模型,二階supertwisting滑模算法的s的相軌跡如圖2所示。
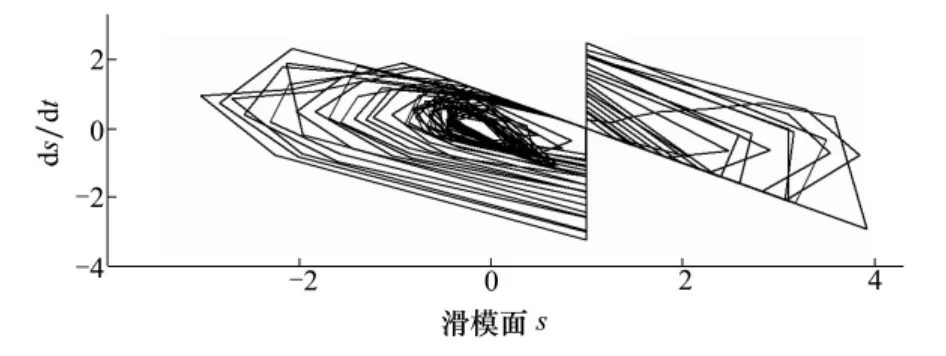
圖2 super-twisting算法s滑模面相軌跡收斂曲線
為了更好地說明super-twisting算法的魯棒性能和消抖性能,利用MATLAB進行,常態下高階滑模與典型PI控制比較,并在輸入擾動和負載擾動下與典型PI控制進行比較。
3. 1穩態性能比較測試
當全橋逆變器在典型比例積分PI控制下,電壓瞬時值為內環取比例系數Kp= 2. 4641×104,積分系數Ki= 3. 1,電壓平均值外環取比例系數Kp= 0. 1,積分系數Ki= 64. 8。變換器輸入電壓為48 V,輸出給定參考值為280 V,50 Hz。和高階滑模super-twisting算法控制下的輸出電壓波形圖:
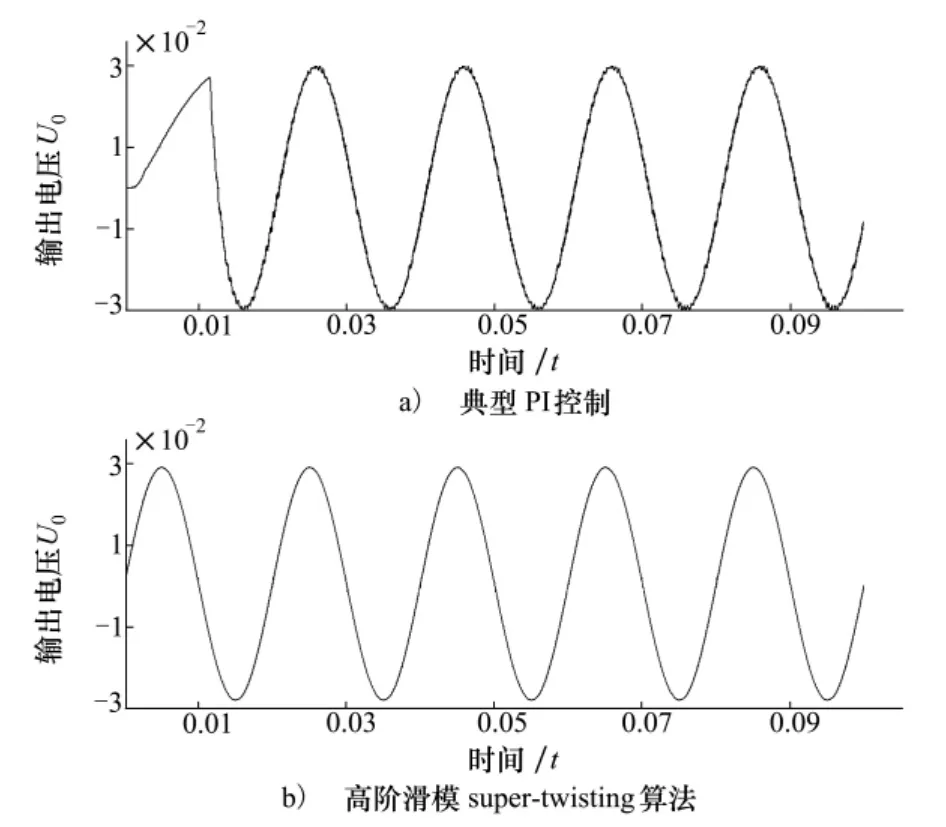
圖3 全橋逆變器輸出電壓波形
通過對比圖3中的a)和b),高階滑模的動態響應過程快,穩態時波形更加平滑,能夠很好地跟蹤參考電壓,從而對于用電負載更加安全和高效。
3. 2負載擾動測試
當負載從40 Ω到100 Ω變化時,如圖4a)所示,在0. 05 s時,負載由100 Ω變化到40 Ω,在0. 08 s時負載由40 Ω變化到100 Ω。全橋逆變器采用瞬時值內環和平均值外環的雙環控制算法和高階滑模super-twisting控制算法,得出如下電壓波形。在圖4a)所示的負載擾動下,通過對比圖4中的b)和c),圖4b)中的典型PI調節,在0. 05 s和0. 08 s有明顯波動。圖4c)中的高階滑模控制對于外界的干擾不敏感,具有強的魯棒性。并且反應速度快,仿真波形更加平滑,對于用電負載更加安全有效。

圖4 負載擾動全橋逆變器輸出電壓波形
3. 3輸入擾動電壓測試
為了更近一步測試2種算法的效果。在MATLAB仿真中,對于輸入電壓如圖5a)所示變化,輸入電壓在0. 02 s時從36 V變化到24 V,在0. 04 s時,從24 V升到58 V,然后在0. 06 s時,上升到72 V,在0. 08 s時重新回到了36 V。這種輸入電壓的擾動模擬新能源發電中受天氣因素的干擾所發出的電能具有隨機性。全橋逆變器采用瞬時值內環和平均值外環的雙環控制算法和高階滑模super-twisting控制算法,得出如下電壓波形。通過比較圖5b)和圖5c),在輸入擾動頻繁發生的情況下,典型PI調節完全不能滿足跟蹤電壓,輸出正弦波有畸變。而控制器使用高階滑模super-twisting算法,該算法的強魯棒性,對輸入擾動的不敏感。圖5c)中可以清晰看出輸出電壓的正弦波較好。

圖5 輸入擾動電壓下全橋逆變器輸出電壓波形
4 結論
針對新能源發電中存在的隨機性問題,本文設計了一種基于super-twisting算法的動態滑模控制器,并以全橋整流器為例與典型PI控制效果進行對比試驗。仿真結果表明: 1)在常態下典型PI調節可以控制發出正弦波,而高階滑模的動態效果更好。2)在出現輸入和負載擾動時,典型PI調節不能滿足實際需要,而基于super-twisting算法的控制器能夠利用其強魯棒性的特性很好地滿足實際需要。
本文所提出的無抖顫的高階滑模逆變器得到了仿真驗證,基于super-twisting算法的控制器設計為隨機性能源發電的實際工程應用推廣提供了理論基礎和新的設計思路。
參考文獻:
[1]Utkin V.Sliding Mode in Control and Optimization[M].Berlin: Springer-Verlag,1992
[2]Huangfu Y,Laghrouche S,Liu W,Miraoui A.A Chattering Avoidance Sliding Mode Control for PMSM Drive[C]∥Proceedings of the 8th IEEE International Conference on Control and Automation,Xiamen,China,2010: 2082-2085
[3]Levant A.Higher Order Sliding Modes and Their Application for Controlling Uncertain Processes[D].Institute for System Studies of the USSR Academy of Science,Moscow,1987
[4]Fridman L,Levant A.Higher Order Sliding Modes as the Natural Phenomena of Control Theory[C]∥Proceedings of the Workshop Variable Structure and Lyapunov Technique,Benevento,1994: 302-309
[5]Bartolini G,Pisano A,Punta E,Usai E.A Survey of Application of Second-Order Sliding Mode Control to Mechanical Systems [J].International Journal of Control,2003,76(9/10) : 875-982
[6]Levant A.Robust Exact Differentiation via Sliding Mode Technique[J].Automatica,1998,34(3) : 379-384
[7]Levant A.Universal SISO Sliding-Mode Controllers with Finite-Tine Convergence[J].IEEE Trans on Automatic Control,2001,46(9) : 1447-1451
[8]Levant A.Higher Order Sliding Modes,Differentiation and Output-Feedback Control[J].International Journal of Control,2003,76(9/10) : 924-941
[9]Man Z,Paplinski A P,Wu H.A Robust MIMO Terminal Sliding Mode Control for Rigid Robotic Manipulators[J].IEEE Trans on Automatic Control,1994,39(12) : 2464-2468
[10]Bartolini G,Ferrara,A,Usai,E.Output Tracking Control of Uncertain Nonlinear Second-Order Systems[J].Automatica,1997,33(12) : 2203-2212
[11]Bartolini G,Ferrara A,Usai E.Chattering Avoidance by Second-Order Sliding Mode Control[J].IEEE Trans on Automatic Control,1998,43(2) : 241-246
[12]Shtessel Y B,Shkolnikov I A,Levant A.Smooth Second Modes: Missile Guidance Application[J].Automatica,2007,43(8) : 1470-1476
[13]Shtessel Y B,Tournes C H.Integrated Higher-Order Sliding Mode Guidance and Autopilot for Dual-Control Missiles[J].AIAA Journal of Guidance,Control,and Dynamics,2009,32(1) : 79-94
[14]Plestan F,Moulay E,Glumineau A,Cheviron T.Robust Output Feedback Sampling Control Based on Second-Order Sliding mode[J].Automatica,2010,46(6) : 1096-1100
A Super-Twisting Algorithm of Robust High Order Sliding Mode Control for Full-Bridge Inverter
Huangfu Yigeng,Wang Yi,Zhao Dongong,Liang Bo
(Northwestern Polytechnical University,Xi'an 710072,China)
Abstract:Based on Super-Twisting algorithm of high order sliding mode,this paper designs a controller of full bridge inverter.The core idea is to transfer the discrete control law to high order sliding manifold,essentially eliminating the impact of chattering effect.In order to justify the feasibility and effectiveness of the algorithm,it uses MATLAB to simulate control systems and compare results.The simulation results and their analysis show preliminarily that: (1) under the steady state condition,compared with the typical PI control,the high order sliding mode has better tracking; (2) under the condition of large disturbances in input and output,the high order sliding mode control shows strong robustness to the input and output disturbances.
Key words:robustness(control systems),full-bridge inverters,super-twisting,sliding mode control
作者簡介:皇甫宜耿(1981—),西北工業大學副教授,主要從事電源變換技術、新能源發電及其應用研究。
收稿日期:2014-09-30基金項目:教育部博士新教師基金(20126102120050)、陜西省國際科技合作重點項目計劃(20121203202758)與西北工業大學本科畢業設計重點扶持項目資助
文章編號:1000-2758(2015) 02-0315-05
文獻標志碼:A
中圖分類號:TM34