基于D-S理論和模糊神經(jīng)網(wǎng)絡(luò)的疲勞駕駛監(jiān)測(cè)
2016-01-19 01:43:56王仲民李佳玉鄧三鵬
自動(dòng)化與儀表 2016年3期
王仲民,李佳玉,鄧三鵬
(天津職業(yè)技術(shù)師范大學(xué) 機(jī)械工程學(xué)院,天津 300222)
疲勞駕駛監(jiān)測(cè)主要是通過(guò)對(duì)各疲勞特征參數(shù)值進(jìn)行綜合分析來(lái)判斷駕駛員是否疲勞駕駛,為駕駛員疲勞駕駛預(yù)警提供決策依據(jù)[1]。國(guó)內(nèi)外關(guān)于監(jiān)測(cè)疲勞駕駛的方法主要包括檢測(cè)駕駛員操作行為、檢測(cè)車輛狀態(tài)、檢測(cè)駕駛者生理反應(yīng)等。然而,疲勞監(jiān)測(cè)方法現(xiàn)仍處于探索階段,還未形成統(tǒng)一的疲勞監(jiān)測(cè)系統(tǒng)模型及制定出疲勞監(jiān)測(cè)標(biāo)準(zhǔn)。由于疲勞是一種復(fù)雜的生理現(xiàn)象,生理信息能較準(zhǔn)確地反映出疲勞狀態(tài)[2],本文通過(guò)實(shí)驗(yàn)采集駕駛員的生理特征信息,融合分析心率、脈搏和呼吸信號(hào),決策識(shí)別出駕駛員所處的駕駛狀態(tài)。
D-S證據(jù)理論在決策級(jí)的信息融合中具有較好的識(shí)別作用[3],是由Dempster和Shafer提出的一種識(shí)別、融合不確定信息的推理方法。然而,D-S理論中基本可信度的分配需要綜合有關(guān)領(lǐng)域?qū)<业闹R(shí)和經(jīng)驗(yàn),在實(shí)際應(yīng)用中很難實(shí)現(xiàn)。本文首先通過(guò)運(yùn)用與訓(xùn)練模糊神經(jīng)網(wǎng)絡(luò),將相關(guān)專家的經(jīng)驗(yàn)判斷和采集的模糊信息一并融入疲勞決策過(guò)程,然后利用模糊神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)速度快、識(shí)別精度高等優(yōu)點(diǎn),將其輸出的結(jié)果歸一化后設(shè)置為基本可信度。最后采用D-S理論與模糊神經(jīng)網(wǎng)絡(luò)相融合來(lái)決策判定駕駛員駕駛狀態(tài)。決策判定過(guò)程如圖1所示。

圖1 疲勞識(shí)別流程Fig.1 Process of fatigue recognition
1 疲勞駕駛特征參數(shù)的提取
疲勞狀態(tài)下駕駛屬非法駕駛且較危險(xiǎn),開展實(shí)際道路環(huán)境下疲勞駕駛實(shí)驗(yàn)具有很大的危險(xiǎn)性。研究表明,模擬駕駛與實(shí)車駕駛之間存在良好的一致性[4],因此可采用模擬駕駛實(shí)驗(yàn)進(jìn)行相關(guān)研究。
室內(nèi)模擬駕駛實(shí)驗(yàn)中使用Pulse Sensor光電反射式脈搏傳感器、Polar RS800CX運(yùn)動(dòng)心率表、HXB-2型壓電式呼吸傳感器來(lái)采集駕駛員的呼吸、脈搏和心率信號(hào)。在每天相同時(shí)間段內(nèi)進(jìn)行實(shí)驗(yàn),整個(gè)實(shí)驗(yàn)過(guò)程時(shí)間為3 h,持續(xù)一周。安裝心率、脈搏、呼吸儀器設(shè)備后,實(shí)驗(yàn)員先駕駛5 min熟悉操作環(huán)境,根據(jù)研究,單調(diào)路況下,駕駛員將在30 min后出現(xiàn)疲勞特征,即使在實(shí)驗(yàn)前沒(méi)有睡眠或疲勞現(xiàn)象[5],所以選擇120 min作為實(shí)驗(yàn)時(shí)間,其他時(shí)間作為參考。實(shí)驗(yàn)中實(shí)時(shí)動(dòng)態(tài)監(jiān)測(cè)并記錄模擬駕駛者的各種數(shù)據(jù)。
2 D-S理論與模糊神經(jīng)網(wǎng)絡(luò)融合
2.1 D-S證據(jù)理論基本思想
以Ω作為有限個(gè)變量A全部取值的集合,且集合中所有元素均互不相容,集合Ω是變量A的識(shí)別框架。由Ω的全部子集構(gòu)成的一個(gè)集合記作Ω的冪集,表示為 2Ω。
設(shè)識(shí)別框架Ω內(nèi)任意變量A、函數(shù)m、Bel均是從集合 2Ω到[0,1]的映射。
疲勞識(shí)別中,把駕駛員可能出現(xiàn)的狀態(tài)作為假設(shè),各種可能狀態(tài)的集合為辨識(shí)框架,疲勞引起的各個(gè)生理特征信息為證據(jù),則駕駛員各種狀態(tài)之下各個(gè)生理特征的概率分布為該狀態(tài)的基本可信度分配。
設(shè)E1、E2…En為同一識(shí)別框架Ω中的n個(gè)獨(dú)立證據(jù),m1、m2…mn是相應(yīng)的基本概率分配函數(shù),相應(yīng)焦元是 Ai(i=1,2,…,n),若存在,則D-S合成規(guī)則為

2.2 模糊神經(jīng)網(wǎng)絡(luò)的可信度分配
疲勞識(shí)別過(guò)程中,基本可信度可看作是駕駛員各生理特征信息從屬于其駕駛狀態(tài)的隸屬度,因此采用模糊神經(jīng)網(wǎng)絡(luò),利用學(xué)習(xí)建立的模糊推理規(guī)則,模糊推理輸入的駕駛員生理特征參數(shù),推出駕駛員生理特征參數(shù)隸屬于各駕駛狀態(tài)的程度,從而得到D-S理論的基本可信度。
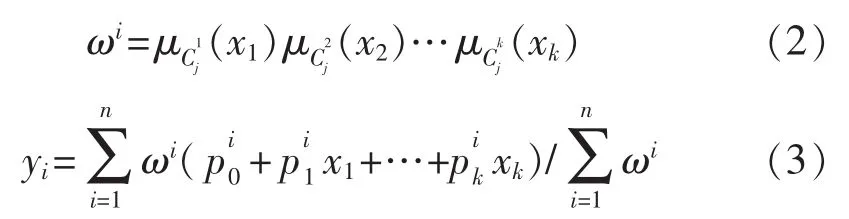
模糊神經(jīng)網(wǎng)絡(luò)包括輸入層、模糊化層、模糊規(guī)則計(jì)算層和輸出層,結(jié)構(gòu)如圖2所示。輸入層為輸入變量xi;模糊化層是用曲線較為平滑的高斯型隸屬度函數(shù)模糊化輸入值,以求出模糊隸屬度值μ;模糊規(guī)則計(jì)算層以模糊連乘式(2)求出模糊算子ω;輸出層以式(3)求出計(jì)算結(jié)果y。
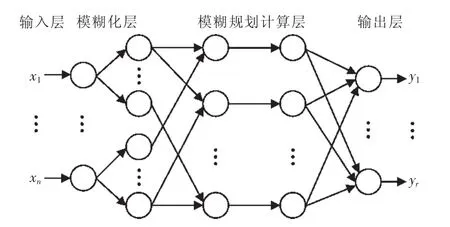
圖2 模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.2 Structure of FNN
2.3 模糊神經(jīng)網(wǎng)絡(luò)疲勞決策
駕駛員狀態(tài)分為清醒和疲勞2類,因此需構(gòu)造2個(gè)子模糊神經(jīng)網(wǎng)絡(luò),每個(gè)子模糊神經(jīng)網(wǎng)絡(luò)的輸入對(duì)應(yīng)著生理特征,即人體呼吸、脈搏和心率信號(hào)特征參數(shù),輸出分別對(duì)應(yīng)一種狀態(tài)。選用提取的清醒和疲勞狀態(tài)下的心率、脈搏、呼吸樣本數(shù)據(jù)各80個(gè),歸一化處理后如表1所示,其中60個(gè)(分為3組)進(jìn)行訓(xùn)練,剩余20個(gè)進(jìn)行測(cè)試。
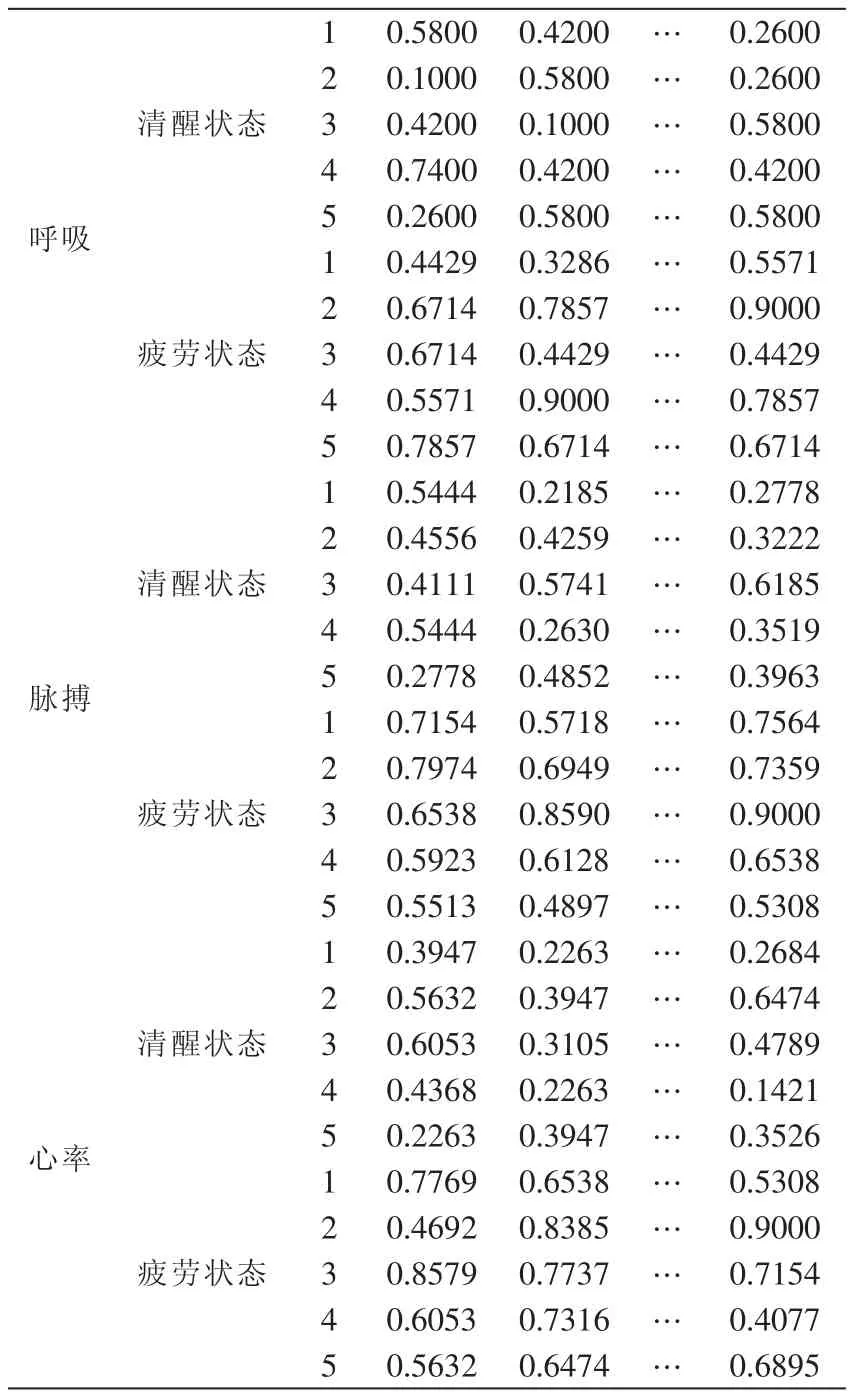
表1 歸一化后生理特征參數(shù)Tab.1 Physiological characteristic parameters after normalization
將每種信號(hào)的3組數(shù)據(jù)作為輸入特征變量,輸入節(jié)點(diǎn)數(shù)為20,輸出節(jié)點(diǎn)數(shù)為2,以減法聚類算法聚類分析樣本,并訓(xùn)練2個(gè)子模糊神經(jīng)網(wǎng)絡(luò),得到誤差變化曲線如圖3所示,337次達(dá)到最佳訓(xùn)練誤差值0.00099226。
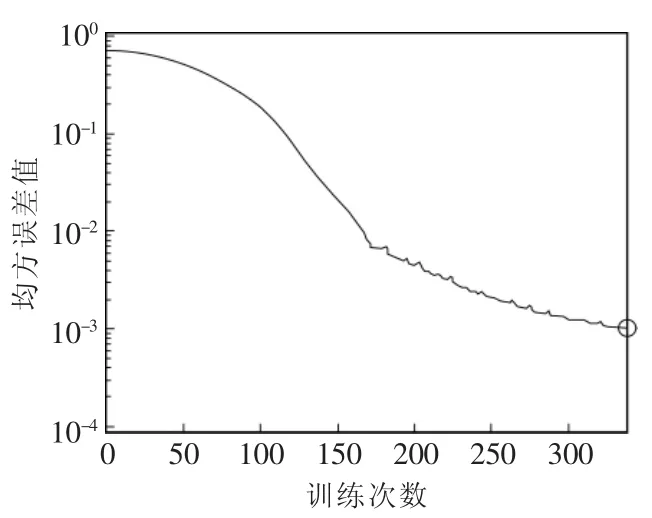
圖3 模糊神經(jīng)網(wǎng)絡(luò)訓(xùn)練誤差曲線Fig.3 Curve of FNN training error
又設(shè)計(jì)一個(gè)3層BP網(wǎng)絡(luò)進(jìn)行疲勞駕駛識(shí)別,輸入層節(jié)點(diǎn)數(shù)取20,根據(jù)網(wǎng)絡(luò)訓(xùn)練效果調(diào)整隱含層節(jié)點(diǎn)數(shù),先設(shè)置為9,輸出層神經(jīng)元個(gè)數(shù)為2,以自適應(yīng)學(xué)習(xí)率與附加動(dòng)量項(xiàng)結(jié)合的方法訓(xùn)練BP網(wǎng)絡(luò)。用訓(xùn)練后的樣本和測(cè)試樣本分別訓(xùn)練與測(cè)試網(wǎng)絡(luò),誤差變化曲線如圖4所示,3000次達(dá)到最佳訓(xùn)練誤差值0.033991。
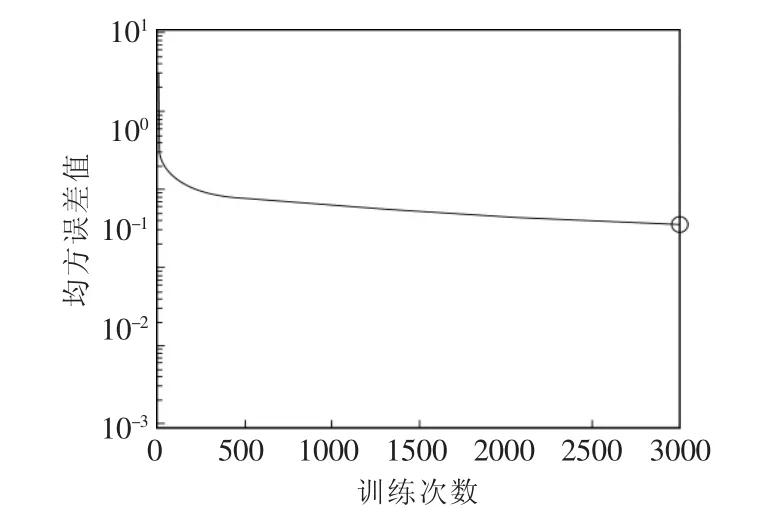
圖4 BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練誤差曲線Fig.4 Curve of BP network training error
從圖3與圖4可知,模糊神經(jīng)網(wǎng)絡(luò)訓(xùn)練速度與性能優(yōu)于BP網(wǎng)絡(luò),誤差也較小,基本無(wú)震蕩現(xiàn)象,因此模糊神經(jīng)網(wǎng)絡(luò)的疲勞決策精度優(yōu)于BP網(wǎng)絡(luò)。
2.4 D-S理論疲勞決策
對(duì)于每個(gè)焦元的基本可信度的獲取問(wèn)題,利用模糊神經(jīng)網(wǎng)絡(luò)進(jìn)行解決。用實(shí)測(cè)數(shù)據(jù)在訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)中進(jìn)行測(cè)試,以經(jīng)過(guò)歸一化處理的模糊神經(jīng)網(wǎng)絡(luò)測(cè)試輸出作為每個(gè)焦元的基本可信度分配,輸出誤差e作為不確定度θ,輸出歸一化計(jì)算公式為
式中:i=1,2為駕駛員的2種狀態(tài),1代表清醒,2代表疲勞;ei為網(wǎng)絡(luò)誤差;yi為模糊神經(jīng)網(wǎng)絡(luò)的輸出;mi為3種生理信號(hào)狀態(tài)下的基本可信度分配。D-S融合結(jié)果如表2所示。
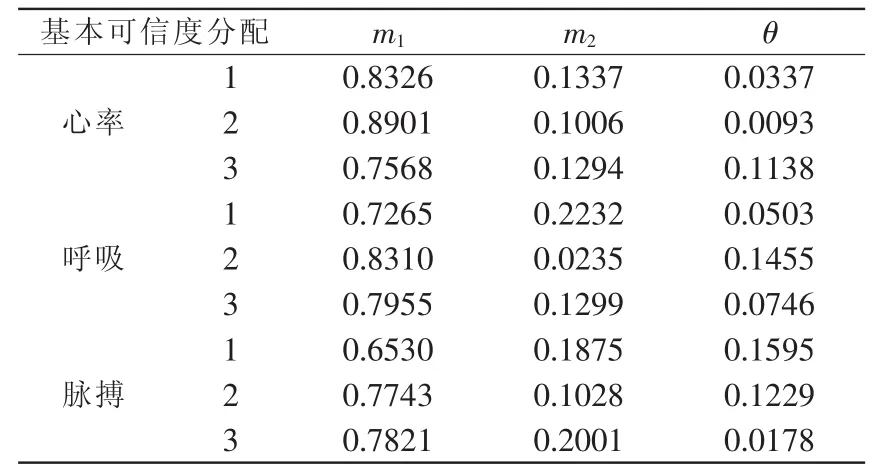
表2 模糊神經(jīng)網(wǎng)絡(luò)輸出歸一化結(jié)果Tab.2 Normalized output of fuzzy neural network
由于m1,m2相互獨(dú)立,將表2中的數(shù)據(jù)按式(1)進(jìn)行融合,結(jié)果如表3所示。與表2對(duì)比可知,決策精度有了很大提高。
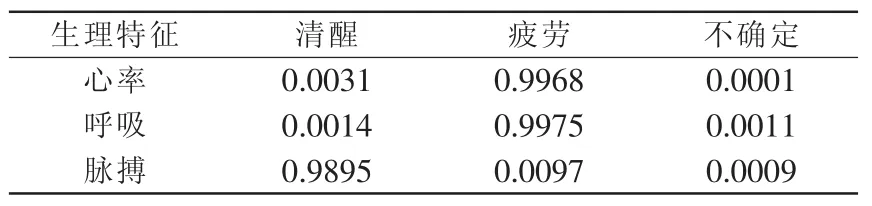
表3 證據(jù)融合結(jié)果Tab.3 Results of evidence fusion
對(duì)表3中數(shù)據(jù)進(jìn)行融合,可得到清醒狀態(tài)下m=0,疲勞狀態(tài)下m=1,不確定度為 0,所以此時(shí)駕駛員處于疲勞狀態(tài)。由于對(duì)模糊神經(jīng)網(wǎng)絡(luò)進(jìn)行測(cè)試的數(shù)據(jù)就是駕駛員處于疲勞狀態(tài)時(shí)的數(shù)據(jù),融和結(jié)果與實(shí)際相符。與表3對(duì)比,可知單個(gè)傳感器對(duì)疲勞狀態(tài)的識(shí)別精度沒(méi)有多傳感器的精度高,且多個(gè)信息融合的結(jié)果優(yōu)于單一信號(hào)判定結(jié)果。
3 結(jié)語(yǔ)
根據(jù)模糊神經(jīng)網(wǎng)絡(luò)兼有模糊理論與神經(jīng)網(wǎng)絡(luò)的特性,構(gòu)建了模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),提出了疲勞駕駛監(jiān)測(cè)方法,并與BP網(wǎng)絡(luò)進(jìn)行對(duì)比,證明該方法具有較高的識(shí)別精度,在疲勞決策過(guò)程中有較好的應(yīng)用。同時(shí),驗(yàn)證了D-S證據(jù)理論在實(shí)現(xiàn)疲勞駕駛監(jiān)測(cè)中的可行性和有效性,為駕駛員疲勞駕駛預(yù)警研究提供一種決策依據(jù),這對(duì)降低因疲勞駕駛引發(fā)的事故具有重要的參考價(jià)值。
[1]孫偉,張小瑞,唐慧強(qiáng),等.基于自適應(yīng)遺傳粒子群優(yōu)化模糊神經(jīng)網(wǎng)絡(luò)的疲勞駕駛預(yù)測(cè)模型[J].汽車工程,2013,35(3):219-223.
[2]Shen K Q,Li X P,Shao S Y,et al.EEG-based mental fatigue measurement using multiclasssupport vector machines with confidence estimate[J].Clinical Neurophysiology,2008,119(7):1524-1533.
[3]屈肖蕾,成波,林慶峰,等.基于駕駛員轉(zhuǎn)向操作特性的疲勞駕駛檢測(cè)[J].汽車工程,2013,35(9):803-807.
[4]Godley S T,Triggs T J,F(xiàn)ildes B N.Driving simulator validation for speed research[J].Accident Analysis and Prevention,2002(34):589-600.
[5]Gillberg M,Kecklund G,Akerstedt T.Sleepiness and performance of professional drivers in a truck simulator comparisons between day and night driving[J].Journal of Sleep Research,1996,5(1):12-15.
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無(wú)線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
汽車電器(2018年1期)2018-06-05 01:22:54
