基于STM32的礦井環境分布式檢測系統研究
2016-01-19 01:43:53賀洪江劉春成任建濤
自動化與儀表 2016年3期
賀洪江,劉春成,任建濤
(1.河北工程大學 裝備制造學院,邯鄲 056038;2.河北工程大學 信息與電氣工程學院,邯鄲 056038)
井下環境監測是安全生產的關鍵。傳統方法采用人工檢測,檢測人員周期性地定點巡回測量。這種監測方式時間間隔大,監測點分布不均勻,已不適應當前礦井環境檢測要求。由于井下環境管理不善所帶來的CO中毒、粉塵爆炸等災難,會給企業帶來無法挽回的經濟損失[1]。因此有必要開發一套適合煤炭井下的精度高、誤差小的自動化環境監測系統。
本系統以井下環境監測需求為出發點,結合實時環境監測的功能要求,以井下空氣質量檢測參數CO和溫濕度為例,開發了以傳感適配器和STM32微控制器為下位機、PC為上位機的環境監測系統。通過CAN總線實現了多點分布、集中監控,開發了監測精度高、易于擴展、能夠實時多點監控井下環境的實用系統。
1 環境檢測系統結構及功能
環境檢測系統采用下位機和上位機2層結構設計,如圖1所示。下位機是基于STM32處理器的數據采集終端,主要功能是數據采集和信號處理。終端通過CAN總線[2]與上位機通信。實時發送CO濃度、溫濕度、報警等信息至上位機。
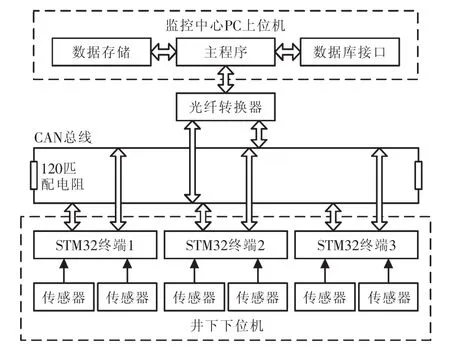
圖1 環境監測系統結構示意Fig.1 Schematic diagram of environmental monitoring system
監控中心以PC監控主機作為上位機,對整個監控系統的數據進行存儲,可遠程控制系統采集終端。下位機和上位機2部分協同工作,完成對環境質量多點多參數的監測任務。PC監控主機接收到警報信息、數據進行二次比對,防止誤報,超出閾值上位機報警,實時告知管理人員井下基本情況,同時顯示時間、地點和環境指標等報警信息,管理人員在地面的監測中心就能對整個井下環境質量了如指掌。
2 檢測系統下位機硬件設計及工作原理
下位機硬件結構如圖2所示,由STM32微控制器、防爆電源模塊、顯示模塊、撥碼開關、CO濃度檢測(EC805-CO)、溫濕度采集模塊 SHT11、CAN總線等模塊組成。
下位機將采集的信號轉換成STM32可識別的數字信號并裝入數組,再進行歸一化加權算法處理,提高精確度;最終數據與終端的閾值進行對比,高出閾值報警,然后通過CAN總線向遠端上位機發送數據;低于閾值,數據直接上傳至上位機,完成后繼續處理下一個數據。

圖2 系統終端硬件結構示意Fig.2 Schematic diagram of the hardware structure of the system terminal
2.1 下位機電源電路
設計采用KDW127/12防爆電源對下位機進行供電,重點解決現場電源與備用電源的無縫切換問題。現場電路工作正常時,處理器采用井下現場127 V進行供電,蓄電池做備用電源。為保證數據采集的連續性,本文采用4個超級電容設計了下位機的內部供電系統。保證現場電路和備用電池之間無縫切換。 供電電路如圖 3 所示,R100對 C401,C402,C403,C404充電電流進行限制;C401,C402,C403,C404作為現場電路事故時持續為控制器供電的電源,最長供電時間可達400 s。
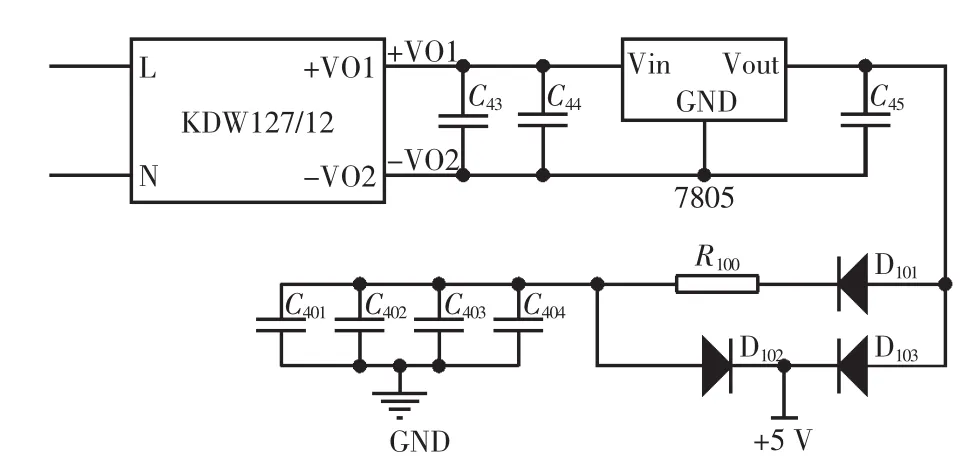
圖3 下位機供電電路Fig.3 Lower computer power circuit
2.2 CO濃度監測電路設計
EC805-CO模塊采用TTL串口輸出,電化學檢測方式,檢測范圍大(0~500 ppm),無需預熱,可靠穩定,因此采用EC805-CO對CO進行采集。EC805-CO模塊是TTL串口輸出,所以EC805-CO的4引腳RX與STM32的PA9連接,3引腳與STM32的PA10連接,2引腳接地,1引腳接電源+5 V。電路應用如圖4所示。
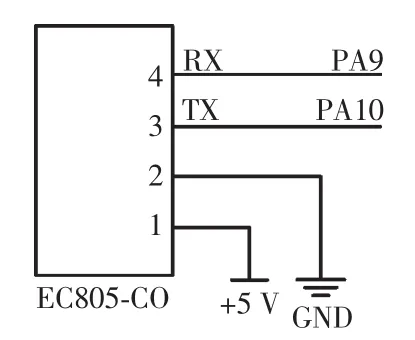
圖4 CO濃度監測電路Fig.4 Carbon monoxide concentration monitoring circuit
2.3 溫濕度采集電路
下位機溫濕度傳感器采用SHT11芯片。該傳感器單總線設計,接口電路簡單,直接輸出數字信號,測量精度高、抗干擾能力強。SHT11傳感器2腳DATA與STM32的PB6相連加10 k上拉電阻,3腳SCK與PB7連接,VDD和GND之間連接去耦電容。通過STM32控制就可采集到相應的溫濕度[3]。 SHIT11芯片電路應用如圖5所示。
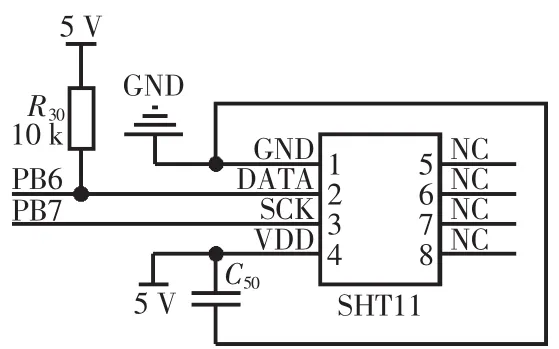
圖5 溫濕度采集電路Fig.5 Temperature and humidity sampling circuit
2.4 繼電器控制電路
該下位機采用歐姆龍/MK3HP防爆繼電器,控制電路采用光電耦合器與現場電路電氣隔離,防止紋波干擾。當現場電路發生停電、閃斷、短路等異常情況時,STM32控制對應輸出端口,光耦9腳輸出高電平,R32是基極偏置電阻,給三極管基極提供偏置電流;三極管飽和時,控制繼電器閉合,線路斷開,實現電源切換;如果現場電網故障沒有排除,則繼電器斷開狀態保持,由備用電池組繼續供電。D6為續流二極管,C15為濾波電容。繼電器控制電路設計如圖6所示。
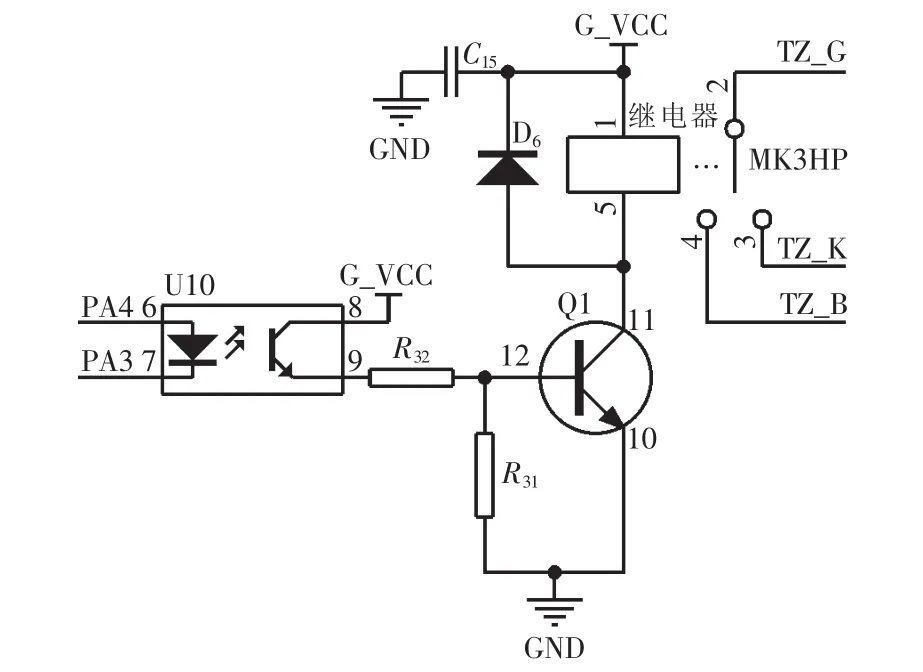
圖6 繼電器控制Fig.6 Relay controlling circuit
2.5 CAN總線硬件設計
硬件電路如圖7(a)所示。CAN收發器采用PCA82C250,采用6N137光耦進行電氣隔離,防止網絡因故障燒毀主控芯片。PCA82C250是一款高速CAN收發器芯片,兼容ISO/DIS 11891標準,具有接口簡單、體積小、性能可靠的優點。該模塊的主要功能是將邏輯電平轉換為差分電平。CAN總線傳輸差分信號,為防止因電阻匹配問題引起的信號反射,在網絡的兩端加上120 Ω的終端電阻。
U3接收端IN+端采用MORNSUN B0505S5V/5 V隔離,防止旁路對CAN總線產生紋波干擾,如圖7(b)所示。
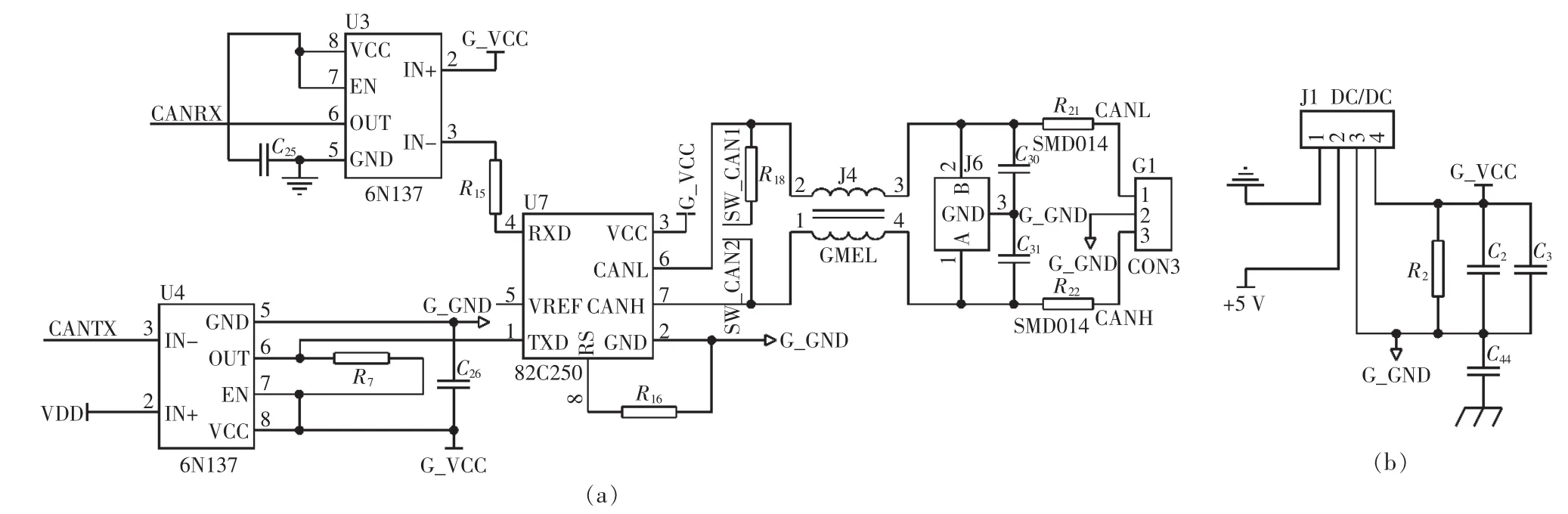
圖7 CAN總線硬件Fig.7 CAN-Bus hardware
3 軟件設計
環境監控終端的軟件設計,直接影響到環境監控系統的穩定性。監控中心和下位機距離不確定,最遠端可達十幾公里。針對這種特殊情況,設計采用LCAN-FOB總線型CAN轉光纖設備進行遠距離通信,該設備已做防爆處理,性能穩定,抗干擾能力強,符合井下使用標準。
3.1 CAN協議的選擇
CAN協議已成為工業控制領域標準通信協議之一,通過該協議,可以把不同廠商的設備組網,實現集中控制。
根據DSA-123 CAN網傳輸規約,CAN2.0協議有標準幀和擴展幀2種工作模式,本系統采用CAN2.0B標準幀[4]。幀格式如表1所示,CAN2.0B標準幀ID為11位,可管理200多臺下位機,下位機每幀1次可傳輸8個字節有效數據。
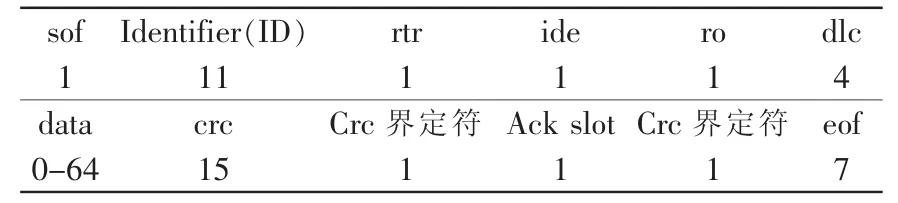
表1 幀格式結構示意Tab.1 CAN-Bus data frame format
下位機首次開機,為保證與上位機信息同步,先與上位機系統進行時間同步。現在上位機是2015-06-01T7:13:24:33。 時間存放在 8 個寄存器中,精確到毫秒,轉換成16進制,則上述時間存儲為07DF 06 01 07 0D 18 00 21。則上位機發送校時廣播命令,格式為
ID28—ID21:1111 1111 目標地址:廣播地址
ID20—ID19:00 保留位 置0
ID18—ID13:00 0000 幀號 0
ID12—ID5:0000 0000 源地址:管理單元地址
ID2—ID0:00 0 幀類型:校時幀
X X X:000 保留位 置0
DATA0=07DF (0-99)BIN 年
DATA1=06 (1-12)BIN 月
DATA2=01 (1-31)BIN 日
DATA3=07 (0-23)BIN 時
DATA4=0D (0-59)BIN 分
DATA5=18 (0-59)BIN 秒
DATA6=00 (0-999)BIN 毫秒高位
DATA7=21 毫秒低位
3.2 下位機控制程序
下位機終端采用定時中斷方式對傳感器數據Ti進行采集。為防止下位機由于某些特殊情況造成誤報錯報,提高采集準確度,本設計采用歸一化加權平均法對采集的溫濕度和CO數據進行處理。如果采用普通的平均值算法,只是把誤差進行了平均化,所以得到的最終處理結果精確度不高。歸一化加權平均值算法是利用計算數據的加權值進行數據處理,該方法精度高、計算量小、實現簡單,因此本系統采用歸一化加權平均算法對采集數據進行處理[5]。具體過程如下:
1)采集數據 Ti(i∈[1,n])進行平均值處理

2)計算每個數據相對平均值Tˉ的偏差量 ΔTi(i∈[1,n])

3)將偏差量 ΔTi代入權值函數 F(T)作歸一化處理得到 ΔUi(i∈[1,n])

4)由歸一化的偏差量得到加權值 Ui(i∈[1,n])
5)由上述加權值最終得到平均值Uˉ

計算得到的物理量與系統STM32存儲器中的閾值進行比較,當超過閾值時,即環境對應指標超限,觸發子程序,聲光報警,同時將數據發送至上位機。下位機工作流程如圖8所示。
3.3 上位機工作流程和程序設計
上位機系統采用VC++6.0開發,SQL數據庫對數據進行管理,通過調用API函數實現CAN的數據收發,完成通信工作。上位機模塊化設計包括CAN通信、數據處理、人機交互界面3大部分。
CAN通信和數據處理工作流程如圖9所示,CAN總線初始化完成后,上位機PC采用輪巡方式對各下位機發送的數據接收處理。上位機再次校驗接收到的數據,超出閾值,報警;數據正常,繼續接收下一個ID的數據;人機交互界面完成鍵盤解釋工作,如圖10所示,實時顯示位置、CO濃度、溫度、時間、警報狀態等信息。通過滾動條可以查看其他作業區環境情況。
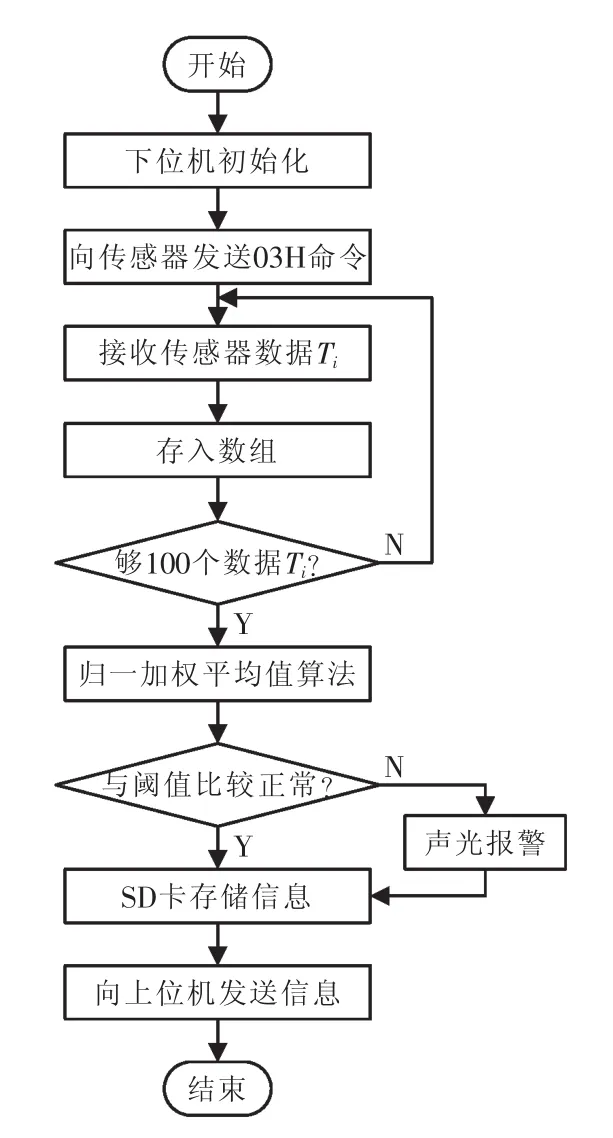
圖8 下位機工作流程Fig.8 Lower computer work flow chart
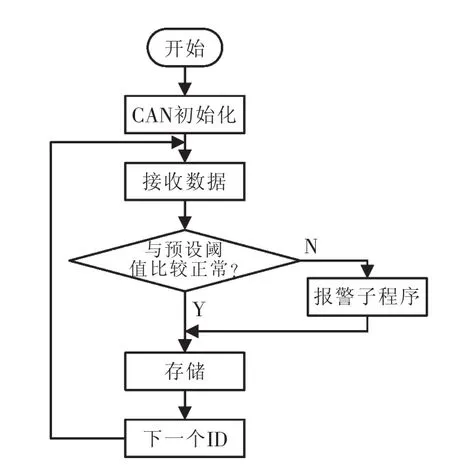
圖9 上位機工作流程Fig.9 Upper computer work flow chart

圖10 上位機人機交互界面Fig.10 PC man-machine interaction interface
4 結語
分布式監測系統的設計是為了提高煤礦工人井內作業的安全性、最大限度規避井內CO、溫濕度等因素帶來的風險。系統以STM32微處理器和CAN總線為硬件基礎,實時檢測井下環境質量。經長時間測試,系統工作穩定、丟包率低,達到了實時監控井下環境的目的。
[1]孫繼平.煤礦安全監控技術與系統[J].煤炭科學技術,2010,38(10):1-4.
[2]張濤.煤礦井下安全監控分站的設計及其仿真實現[J].計算機測量與控制,2015,23(1):86-89.
[3]張艷麗,楊仁弟.數字溫濕度傳感器SHT11及其應用[J].工礦自動化,2007(3):113-114.
[4]DSA-123 CAN網傳輸規約[Z],2003.
[5]龍宏波,葉曉慧,譚思煒.歸一化加權平均值算法在測量中的應用[J].電光與控制,2010,17(12):68-70.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
