船舶推進裝置氣囊隔振系統對中可控性問題研究
2016-01-12 10:39:31卜文俊,何琳,施亮
振動與沖擊 2015年5期
第一作者卜文俊男,博士生,1979年2月生
通信作者何琳男,教授,博士生導師,1957年生
船舶推進裝置氣囊隔振系統對中可控性問題研究
卜文俊1,2,何琳1,2,施亮1,2
(1.海軍工程大學振動與噪聲研究所,武漢430033;2.船舶振動噪聲國家重點實驗室,武漢430033)
摘要:對船舶推進裝置氣囊隔振系統對中可控性問題進行了系統研究。通過建立控制響應計算模型、多目標對中控制模型,提出了對中可控性分析方法,使得控制系統能夠根據不同工作情況自主調整控制系統工作參數,以保持良好的對中控制收斂性能,并通過實驗驗證了該方法的可行性。該方法已應用于某型船舶推進裝置氣囊隔振系統,成功實現了氣囊柔性支撐狀態下的推進裝置高效隔振。
關鍵詞:推進裝置;氣囊;可控性
基金項目:海軍工程大學基金(HGDKYJGZXJH006)
收稿日期:2013-12-11修改稿收到日期:2014-03-07
中圖分類號:O328文獻標志碼:A
Alignment controllability of air spring vibration isolation system of a ship propulsion plant
BUWen-jun1,2,HELin1,2,SHILiang1,2(1. Institute of Noise & Vibration, Naval University of Engineering, Wuhan 430033, China;2. National Key Laboratory on ship Vibration & Noise, Wuhan 430033, China)
Abstract:The alignment controllability of air spring vibration isolation system of a ship propulsion plant was studied systematically. The controllability analysis was carried out through establishing a control response calculation model and a multi-object alignment control model. The control system was made to adjust control capability parameters automatically and to manifest good alignment control astringency. Experiment results confirmed the feasibility of the method. The method has been used in an air spring vibration isolation system and has realized a high vibration isolation effect triumphantly on a ship propulsive plant mounted on flexible air springs.
Key words:propulsion plant; air spring; controllability
推進裝置是船舶主要機械噪聲源,對其實施高效隔振可提高船舶舒適性,對艦艇而言可同時提高其聲隱身性能。
根據隔振理論,實現推進裝置高效隔振需盡量降低隔振器固有頻率。氣囊隔振器具有固有頻率低、駐波頻率高等優點,是實現其低頻高效隔振的有效途徑。但推進裝置采用低頻隔振器后將在擾動(如輸出扭矩、船舶傾斜、搖晃等)作用下產生較大軸系不對中。軸系不對中將導致推進軸系軸承負荷增加、軸系傳遞效率降低、聯軸器承受較大交變應力等一系列問題[1]。如何保持良好的軸系對中是推進裝置采用氣囊隔振技術面臨的障礙。Kantola[2]介紹了美國某潛艇推進電機采用了低頻橡膠隔振器后在輸出扭矩反作用下產生較大不對中,為此專門設計了利用氣囊充氣產生作用力抵消反扭矩影響的裝置,但該裝置不能實時監測對中狀態并實現高精度控制。
2007年以前,國、內外還沒有關于直接采用氣囊隔振器對推進裝置進行隔振的相關報導。徐偉等[3]對船舶主機氣囊隔振系統的動態特性進行了理論研究,評估了其隔振性能。卜文俊等[4]對船舶主機軸系對中測量方法進行了研究,解決了實時對中監測問題。施亮等[5]探討了一種推進裝置不運行情況下的靜態對中控制方法,該方法未考慮擾動影響下的對中控制,存在一定局限性。施亮等[6]采用多元二次函數求極值方法研究了不同故障模式下的對中可控性,分析結果受建模誤差影響較大,且未進一步分析可控性分析結果的應用。總體而言,已開展的研究未形成系統的對中可控性問題的分析及應用方法。
推進裝置氣囊隔振系統隔振器數目多,導致控制通路多,對數百噸級大型氣囊隔振系統其控制通路更多達幾十條,此外,軸系對中控制涉及多個平動、轉動分量,這使得控制過程比較復雜。如何實現各類情況下的軸系對中可控直接關系到裝置能否長期安全、穩定地運行。
本文在建立對中控制響應計算模型以及多目標對中控制模型的基礎上,進行對中可控性分析方法研究,并根據對中可控性分析結果,提出了相應的控制系統工作參數自主調整方法,使系統能夠適應不同工作情況具備良好的控制收斂性能。
1對中可控性問題
推進裝置軸系結構示意如圖1所示。
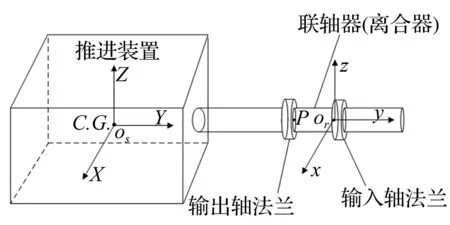
圖1 推進裝置軸系結構示意圖 Fig.1 Shaft configuration of propulsion plant
圖中,os-XYZ為本體坐標系,坐標系原點位于推進裝置質心;or-xyz為參考坐標系,坐標系原點位于輸入軸法蘭端面中心點;推進裝置輸出軸法蘭端面中心點為P。
設軸系對中狀態向量為:

(1)
式中,x、y、z分別為聯軸器(離合器)中心點P相對參考坐標系or-xyz的水平偏移量、軸向偏移量、豎直偏移量;φ、ψ、θ分別為豎直偏斜角、自轉角、水平偏斜角,表示本體坐標系os-XYZ相對參考坐標系or-xyz的各轉動分量。
根據可控性一般定義[7],對中可控性是指從任意初始狀態出發,在有限時間內,是否存在可施加的控制作用使系統由當前狀態遷移至期望對中狀態。
推進裝置氣囊隔振系統主要由氣囊隔振子系統、智能控制子系統、保護子系統三部分組成,工作原理如圖2所示。
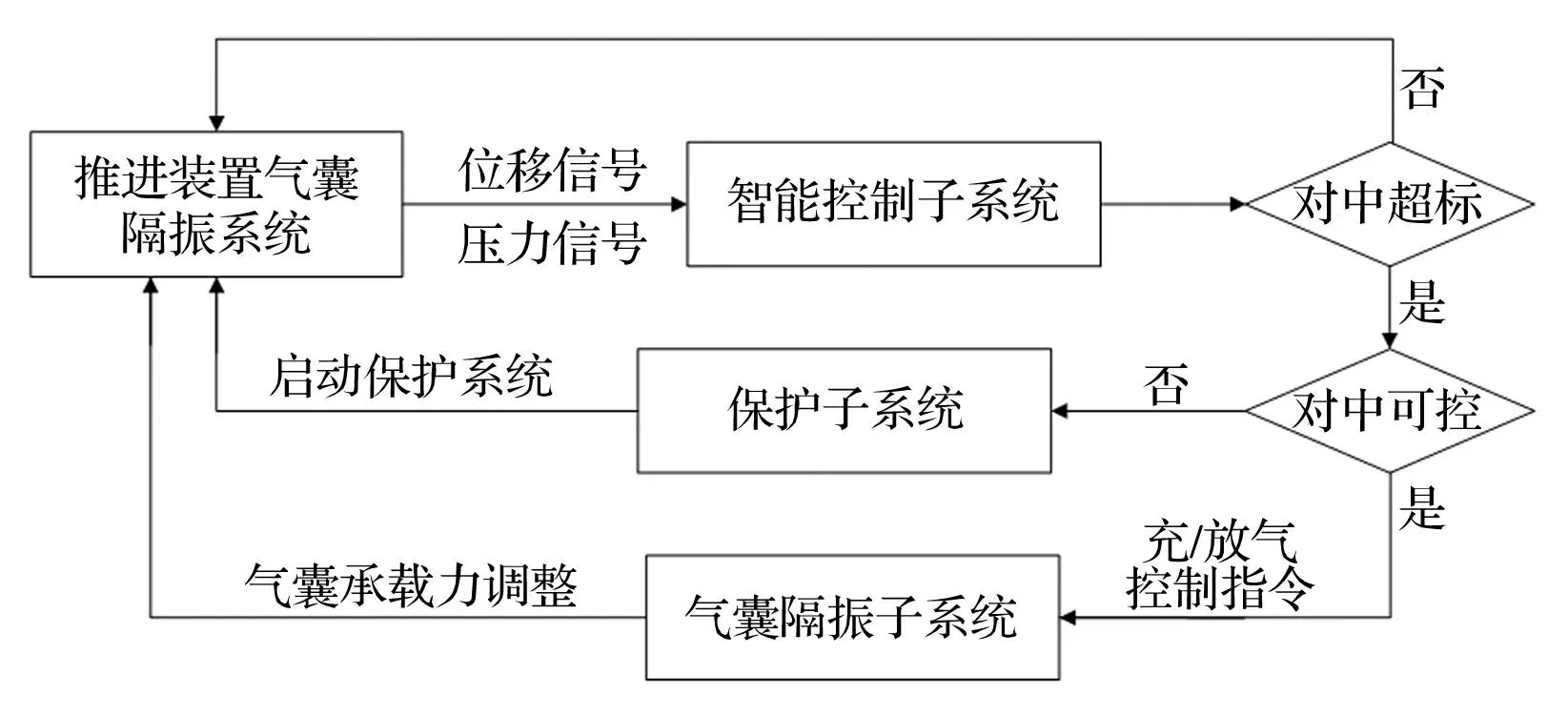
圖2 推進裝置氣囊隔振系統工作原理 Fig.2 Work principle of air spring vibration isolation system of propulsion plant
系統基本工作原理如下:智能控制子系統實時監測軸系對中狀態及氣囊工作壓力,如果對中超標且具備對中可控性,則通過氣囊充放氣控制保持軸系對中,如果由于元件嚴重故障等原因造成對中不可控,則通過保護子系統保持軸系對中。本文研究通過氣囊充放氣進行對中控制的可控性問題。
將充/放氣控制對軸系不對中的控制作用表示為:
AeqΔp=-xeq
(2)
式中,Δp為各氣囊隔振器工作壓力變化向量;Aeq為氣囊壓力變化引起的軸系對中變化變換矩陣;xeq為可測的初始不對中量狀態。
如果Aeq為定值,則對中可控性問題就歸結為判斷以下關系式是否成立:
Rank(Aeq)=Rank([Aeq,-Xeq])
(3)
由于對氣囊進行充/放氣控制會引起氣囊壓力變化從而引起系統剛度矩陣變化,因此,進行對中可控性分析時,不能將Aeq看成具有固定形式的變換矩陣,即不能直接求解判斷對中可控性。
因此,本文將Δp進行分解,建立充放氣控制動作序列{ug(1),ug(2),…,ug(N)},通過迭代方法不斷更新剛度矩陣,獲得較為精確的對中控制作用(AeqΔp)計算結果,從而進行對中可控性分析。
綜上所述,對中可控性分析需解決:如何計算Δpi引起的對中狀態變化,即建立控制響應計算方法;如何建立控制模型規劃控制路徑,以確定充放氣控制動作序列{ug(1),ug(2),…,ug(N)};如何根據控制響應、規劃的控制路徑進行可控性分析。
2控制響應計算模型
控制響應計算模型建立了充/放氣控制作用與氣囊壓力變化量、對中狀態變化量間的關系。
采用“準靜態”過程進行控制響應分析,將充放氣控制等效為沿氣囊主支撐方向作用力Fi。Fi及充放氣控制引起的氣囊壓力變化ΔPi可表示為[8]:
(4)
式中,i為充/放氣控制對應的氣囊編號;qz為滿足超音速流動條件的空氣管路流量;t為充/放氣時間;Pi為#i氣囊的工作壓力;Δri為#i氣囊沿主支撐方向的變形量;η1、η2為根據試驗數據提取的氣囊主支撐方向變形對有效面積、容積的影響系數;Se0i、V0i分別為#i氣囊額定工作高度狀態的有效面積、容積;sgn為符號函數,充氣控制取+1,放氣控制取-1。
第n次充/放氣控制引起的氣囊剛度變化為:
(5)
第n次充/放氣作用后系統剛度矩陣變為:
(6)
式中,j為氣囊編號;m為氣囊總數;Gj為隔振器剛度集結至總體坐標系的變化矩陣。
將Fi沿總體坐標方向分解得到作用力向量Fi,根據隔振裝置力學模型,可建立對中控制響應計算模型:
(7)
式中,Gc為姿態變換矩陣。Δxn為第n次充/放氣控制引起的軸系對中變化量。
3多目標對中控制模型
基于多目標滿意優化方法[9],建立推進裝置氣囊隔振系統多目標對中控制模型。該模型可從任意初始狀態出發,搜索出最優控制路徑,實現多個對中控制目標快速收斂。
對控制路徑點k,最優控制對象ug(k)滿足:
(8)


4對中可控性分析及工作參數自主調整方法
(9)
N次充/放氣控制對應有序數列Ug(控制路徑):
Ug=ug(1),ug(2),…,ug(N)
(10)

根據可控性分析方法,對任意初始狀態、固定預設控制精度,系統是否可控是確定的。但是,工程上預設對中控制精度通常比裝置可正常運行的對中精度限制值嚴格,即部分控制目標具有一定彈性,可根據不同工作情況在限制值范圍內對部分控制目標的精度進行調整,以滿足控制收斂要求。能夠根據不同工作情況自主調整控制系統性能參數已被作為智能控制系統設計中的一項重要工作[10]。
對于推進裝置氣囊隔振系統,自轉角ψ主要影響氣囊隔振器變形量,對聯軸器變形量影響較小,其控制精度具有一定調整空間,可根據對中可控性分析結果,對ψ控制精度進行調整,以保持對中控制收斂。這是進行對中可控性分析的應用目的。

經過以上調整后,重新進行對中可控性分析,若仍然判定當前狀態系統對中不可控,則啟動保護子系統保持軸系對中,以確保裝置安全運行。
5實驗驗證
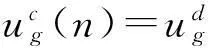
為驗證對中可控性分析及應用方法,在圖3所示的推進裝置氣囊隔振實驗裝置上進行了實驗。
該實驗裝置重約10 t,以30°斜支撐方式布置了12只額定承載力1噸的氣囊隔振器,隔振器固有頻率約6 Hz。
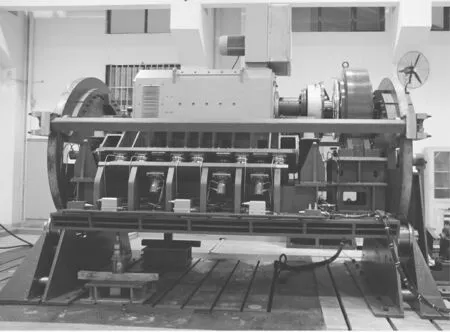
圖3 船舶推進裝置氣囊隔振實驗裝置 Fig.3 Experimental set of air spring vibration isolation system of ship propulsion plant
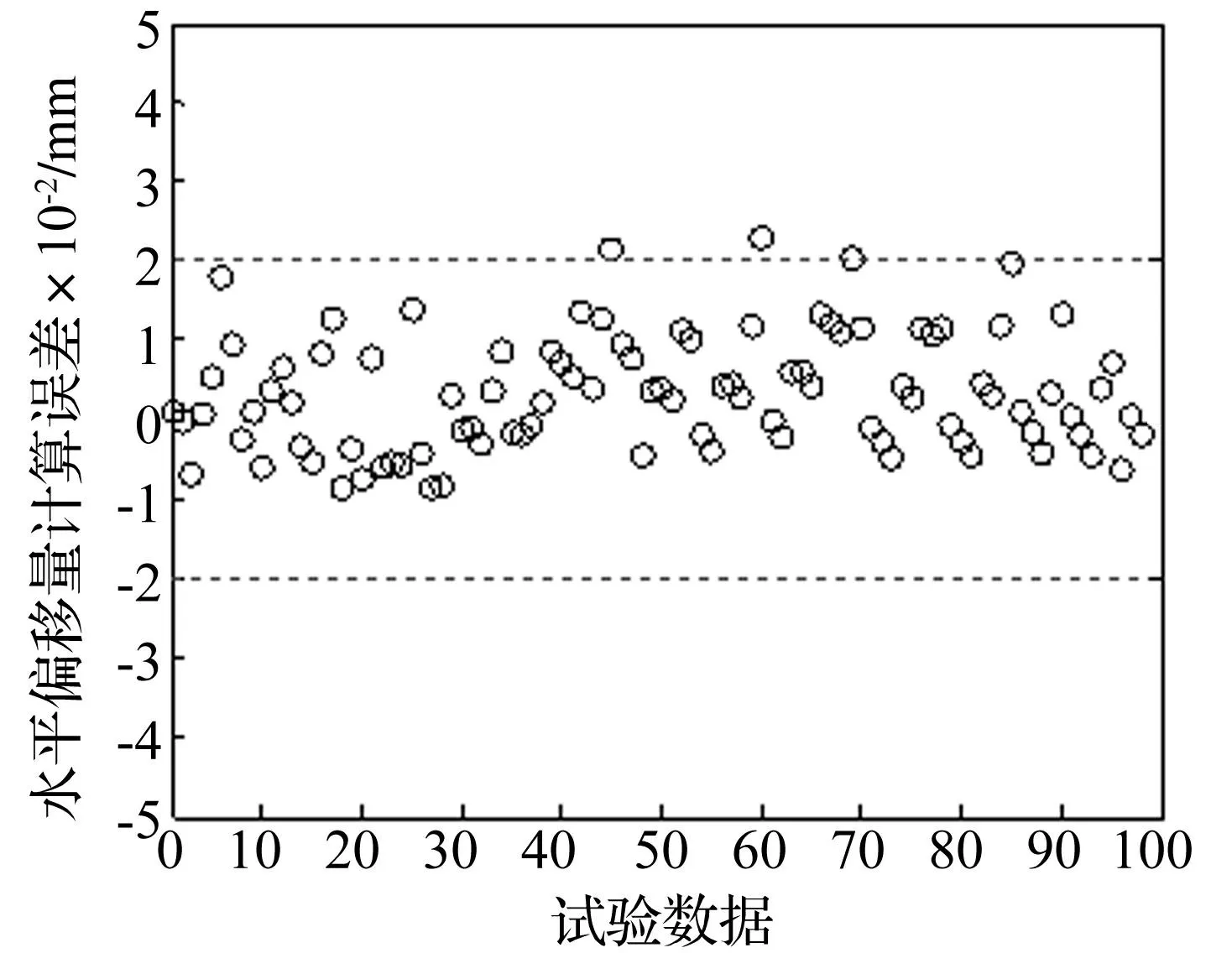
圖4 (a) 水平偏移量計算誤差 Fig.4 a Calculation error of horizontal offset
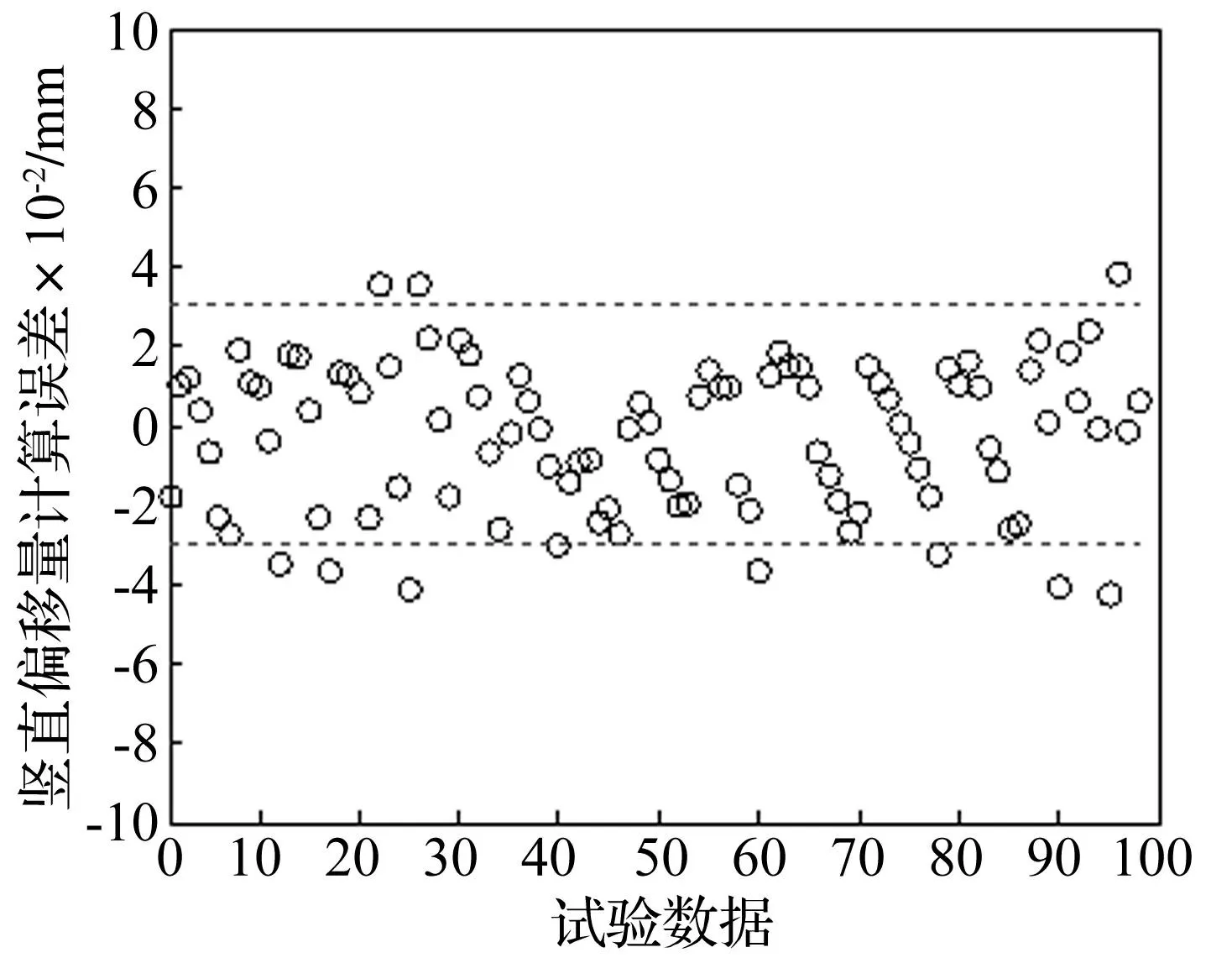
圖4 (b) 豎直偏移量計算誤差 Fig.4 b Calculation error of vertical offset
應用實驗裝置控制系統的數據采集功能,隨機提取100組不同狀態下的控制響應數據,與理論模型計算結果進行對比,分析控制響應模型計算誤差,計算誤差如圖4所示。
從圖4可見,對中控制響應模型計算誤差較小,能滿足對中可控性分析要求。誤差未體現明顯方向性,說明存在一定隨機誤差影響。造成誤差的原因包括:以氣囊隔振器樣品的剛度數據計算,未考慮實際裝置各氣囊隔振器剛度差異;計算過程假設氣源壓力不變,未考慮實際過程氣源壓力波動影響。
偏移量、姿態角的預設對中控制精度分別為0.5 mm、0.5 mm/m,其中自轉角限制值為1.0 mm/m。為減小誤差累積效應的影響,限定每次迭代最大步數為10,若未達到預設對中精度且式(10)中的約束條件滿足則繼續迭代分析。限定最大控制步數為100,相鄰控制動作間隔時間3 s。
調整電機輸出扭矩為50 kN/m,對中控制前初始對中狀態為:水平偏移量-1.18 mm、豎直偏移量-0.55 mm、水平偏斜角0.37 mm/m、豎直偏斜角-0.06 mm/m、自轉角0.1 mm/m。未采用可控性分析方法的控制過程如圖5所示:
從圖5(a)、圖5(b)可以看出,該實驗工況下,由于未采用可控性分析方法,對固定預設控制精度,水平偏移量、自轉角控制收斂性存在沖突,水平偏移量在控制精度閾值(0.5mm)附近振蕩,自轉角也產生振蕩,對中控制過程無法收斂。
圖中,負數表示放氣氣囊號;正號表示充氣氣囊號。
從圖5(c)可以看出,未采用可控性分析方法時,控制系統持續對#7、#9進行頻繁的充氣、放氣控制動作,導致系統陷入振蕩過程,這直接威脅充放氣控制電磁閥的壽命。
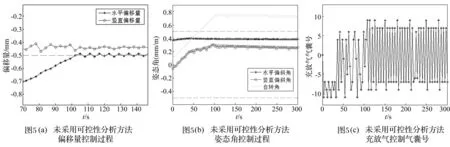

Fig.5(a)ControlprocessofoffsetswithoutcontrollabilityanalysismethodFig.5(b)ControlprocessofattitudeangleswithoutcontrollabilityanalysismethodFig.5(c)Airspringnumberofchargeordeflatewithoutcontrollabilityanalysismethod
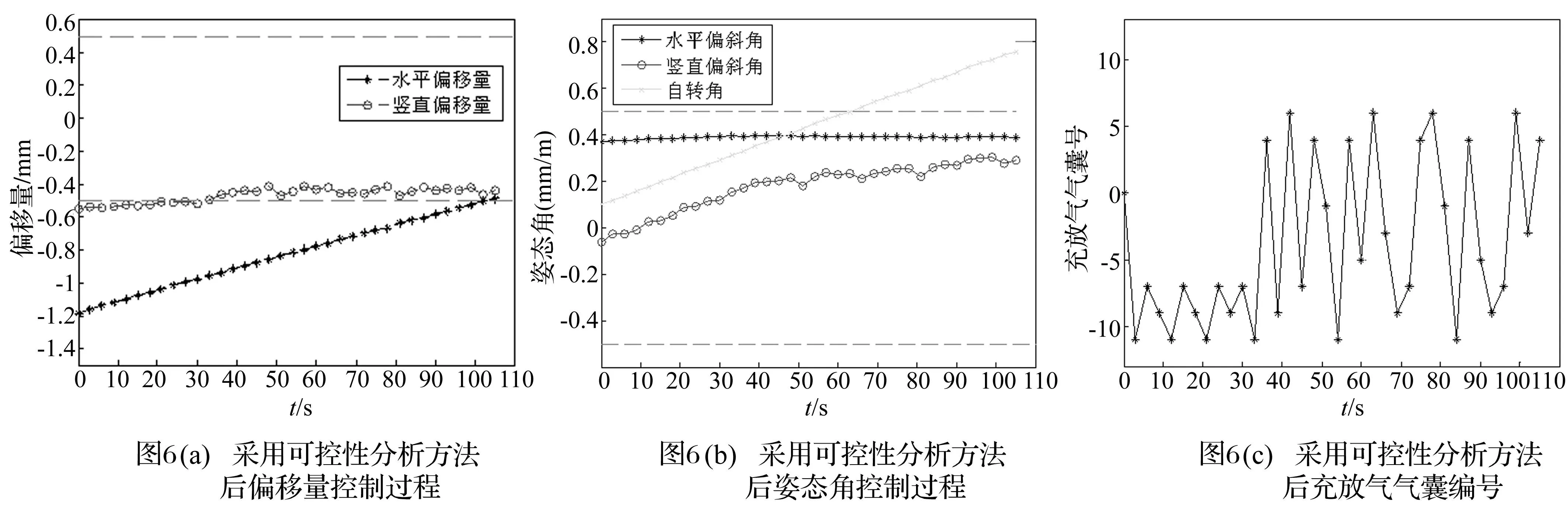

Fig.6(a)ControlprocessofoffsetswithcontrollabilityanalysismethodFig.6(b)ControlprocessofattitudeangleswithcontrollabilityanalysismethodFig.6(c)Airspringnumberofchargeordeflatecontrolwithcontrollabilityanalysismethod
相同實驗工況下,采用可控性分析方法后,對中控制過程見圖6。
從圖6可以看出,采用可控性分析方法后,系統可根據對中可控性分析結果及控制系統參數自主調整方法,調整自轉角的控制精度(由0.5 mm/m降低至0.8 mm/m,未超出其限制值1 mm/m),有效避免了系統陷入振蕩,確保控制過程收斂,同時對中控制模型規劃的控制路徑實現了各對中控制目標的快速收斂。
6結論
為解決氣囊隔振器應用于船舶推進裝置低頻高效隔振面臨的軸系對中難題,開展了軸系對中可控性問題研究,通過建立控制響應計算、多目標對中控制模型,建立了對中可控性分析方法及控制系統工作參數自主調整方法。
通過分別建立充/放氣控制作用下的等效作用力模型、系統剛度矩陣模型,可進行較高精度的控制響應計算,為對中可控性定量分析奠定基礎。
通過多目標滿意優化方法,建立了多目標對中控制模型,可解決控制路徑規劃問題,提供了多目標條件下的對中可控性分析輸入。
通過建立對中可控性分析方法,可判斷裝置任意初始狀態下的對中可控性,并提出了根據可控性進行控制系統工作參數自主調整的方法,使裝置在不同工作條件下能夠保持良好控制收斂性能,實驗結果驗證了該方法的可行性。
該方法已應用于某型船舶推進裝置氣囊隔振裝置,成功實現了氣囊柔性支撐狀態下的推進裝置高效隔振。
參考文獻
[1]Harris C M, Piersol A G. Shock and Vibration Handbook [M]. McGraw-Hill Press, New York, 2002.
[2]Kantola R A,Marine propulsion isolation system for control of motion due to torque and related method [P]. United States Patent: 6623318,2003.
[3]徐偉,何琳,呂志強,等. 船舶主機氣囊隔振裝置動態特性分析[J]. 振動與沖擊,2007,26(7):122-124.
XU Wei, HE Lin, Lü Zhi-qiang.Dynamic characteristic analysis of ship main engine [J].Journal of Vibration and Shock, 2007 26(7):122-124.
[4]卜文俊,何琳,施亮.艦船主機空氣彈簧隔振裝置輸出軸對中姿態實時監測研究[J].振動與沖擊,2009,28(10):217-220.
BU Wen-jun, HE Lin, SHI Liang. Study on output shaft alignment attitude real time monitoring of a marine main engine air mounting system [J]. Journal of Vibration and Shock, 2009,28(10):217-220.
[5]施亮,何琳,徐偉,等.主機氣囊隔振裝置對中姿態控制算法研究[J].振動與沖擊,2010,29(4):97-100.
SHI Liang, HE Lin, XU Wei. Study on alignment controlarithmetic of main engine air spring vibration isolation system [J]. Journal of Vibration and Shock, 2010 29(4):97-100.
[6]施亮,何琳,徐偉,等.船舶主機氣囊隔振裝置的對中可控性[J].海軍工程大學學報,2011,23(5):27-30.
SHI Liang, HE Lin, XU Wei.Alignment controllability of ship main engine air suspension system [J]. Journal of Naval University of Engineering, 2011,23(5):27-30.
[7]Jing F C, Wang L, Xie G M. On the controllability of multible dynamic agents with fixedtopology [C]. Proc of American control conf Hyatt Regency Riverfront, 2009: 5665-5670.
[8]卜文俊.艦船推進主機氣囊隔振技術對中監測及控制研究[D] .武漢:海軍工程大學, 2010.
[9]馮曉云.模糊預測控制及其在列車自動駕駛中的應用研究[D].成都:西南交通大學,2001.
[10]吳宏鑫,胡軍,解永春. 基于特征模型的智能自適應控制[M].北京:中國科學技術出版社,2009.

