Serret-Frenet框架下的神經滑模船舶路徑跟蹤控制
2016-01-08 05:30:00李湘平吳漢松阮苗鋒
武漢理工大學學報(交通科學與工程版) 2015年1期
李湘平 吳漢松 阮苗鋒
(海軍工程大學電氣工程學院 武漢 430033)
Serret-Frenet框架下的神經滑模船舶路徑跟蹤控制
李湘平吳漢松阮苗鋒
(海軍工程大學電氣工程學院武漢430033)
摘要:針對欠驅動船舶在恒定速度航行下的路徑跟蹤問題,提出了一種在Serret-Frenet框架下,基于輸入輸出線性化的神經滑模控制算法.該算法利用Serret-Frenet框架下船舶運動方程的推導形式,將其轉換為類似于直線航跡控制的問題,采用神經網絡對基于趨近律的滑模控制進行優化,解決了趨近律滑模控制對系統模型的依賴性,提高了控制器的魯棒性,并設計了狀態觀測器對控制對象狀態進行重構,以解決系統狀態量測量誤差對控制效果的影響.在無干擾和存在干擾及參數攝動的條件下分別進行了仿真,結果表明該控制律具有良好的跟蹤性能.
關鍵詞:欠驅動船舶;路徑跟蹤;輸入輸出線性化;神經滑模控制
李湘平(1990- ):男,碩士生,主要研究領域為船舶非線性控制
0引言
研究欠驅動船舶的路徑跟蹤控制,可以簡化控制系統的結構、降低成本.目前就欠驅動船舶的路徑跟蹤問題,已經有了大量的研究[1-6].文獻[1-3]給出了自適應的航跡控制算法,但不適合曲線航跡控制的情況;文獻[4]采用反步法的滑模控制實現了曲線航跡控制,但是對于滑模切換項系數采用預估上界的方法給定,因而控制量存在較大的抖振;文獻[5]給出了在Serret-Frenet標架下的船舶運動方程,通過坐標變換可以將曲線路徑跟蹤問題轉換為直線路徑跟蹤問題,再直接利用神經網絡進行控制,設計方法較為繁瑣;文獻[6]同樣給出了Serret-Frenet標架下船舶航跡控制,但是由于采用精確反饋控制,魯棒性較差;文獻[7]給出了基于輸入輸出線性化的重定義輸出變量的航跡控制方法,并在理論上推導了系統全局漸近穩定時的充分條件.
本文在文獻[1-6]研究成果的基礎上,結合重定義輸出變量和神經滑模控制算法,設計了一個自適應神經滑模路徑跟蹤控制器.利用滑模控制的設計簡便性,結合神經網絡對非線性系統的強大映射能力,有效地消除趨近律滑模控制對被控對象模型的依賴性.并設計了狀態觀測器,減少船舶狀態量測量所帶來的擾動和噪聲.最后理論上證明了系統的全局漸近穩定性,仿真結果表明該控制器具有較好的性能.
1船舶路徑跟蹤模型
欠驅動船舶運動的數學模型描述如下[8]
(1)
式中:x,y,φ為船舶的位姿狀態量,分別表示縱向位置、橫向位置和航向角;u為船舶前進速度;v為船舶的橫蕩速度;ω為航向角速度;mii(1≤i≤3),dii(2≤i≤3)為船舶模型參數;控制輸入Tr為首向力矩.本文的控制目標是給定期望航跡,設計控制量Tr,使船舶能從任意初始偏差位置處跟蹤上設定軌跡,其跟蹤原理圖見圖1.
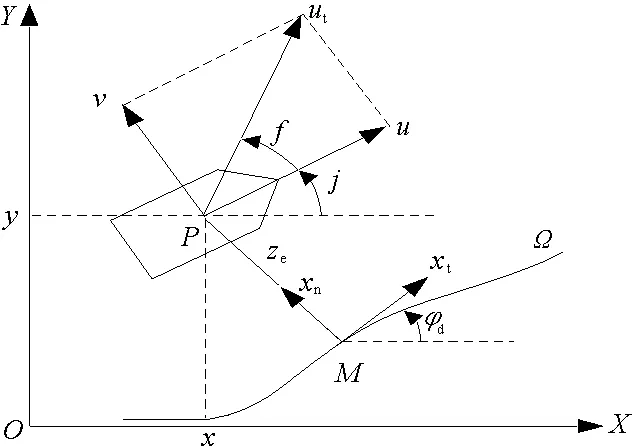
圖1 欠驅動船舶路徑跟蹤原理

(2)

(3)
(4)
可得到新的狀態方程如下.
(5)
式中:

(6)
式(6)的控制目標是設計控制輸入量Tr,使得z=0.
2船舶路徑跟蹤控制器設計
2.1狀態觀測器設計
在恒定速度下,若令x=[φ,v,w]T,定義輸出y=φ=Cx,則有

(7)
設計狀態觀測器為
(8)


(9)
因此只要設計L使得式(8)全局漸近穩定,即可實現對式(7)狀態的重構,利用極點配置算法設計L,此處略.

(10)

2.2滑模控制器設計
對式(10)設計基于指數趨近律的滑模控制器,滑模切換函數為
(11)
趨近律為

(12)
(13)
(14)

(15)

(16)
2.3神經滑模控制器設計
由于受外界干擾及對象參數本身的不穩定性,f和g不易求得,利用RBF神經網絡能夠從期望的精度逼近任何連續映射[11],設計RBF網絡用于逼近滑模控制律式(14).
神經網絡徑向基向量h=[h1h2…hn]T,式中:n為隱含層節點數目;hj為高斯基函數.
(17)

(18)
設神經網絡的整定指標為
(19)
式中:r(t)為期望輸出;y(t)為實際輸出.對于神經網絡的權值及參數,可采用最小梯度下降學習算法進行調整,如下式
(20)

(21)
定義神經網絡模型的輸出為
(22)
定義神經網絡整定指標為
(23)
由式(20)可得神經網絡的權值及參數學習規則

(24)
(25)

(26)
由定理1可知,在神經滑模控制律式(18)的控制下,式(10)可以趨于穩定,同時式(6)趨于穩定.由于控制律式(18)不需要對象的精確參數,因此在存在干擾的情況下,式(6)是趨于穩定的.
3仿真與分析
針對標稱情況及存在外界干擾和參數攝動兩種情況下分別進行仿真,以文獻[2]中的船為例進行仿真設計,仿真參數如下.
m11=1.2×105kg,m22=1.779×105kg,m33=6.36×107kg,d22=1.47×105kg·s-1,d33=8.02×106kg·s-1,u=10m·s-1.
3.1控制器參數設定
本文涉及的主要參數是神經滑模控制器參數的選擇以及重定義輸出變量式(4)中k的選擇.其中滑模控制器參數設定為:c=0.2,q=20 000,ε=50,k=0.012.RBF神經網絡隱層節點數為10,初始權值w=ones(1,10),v=ones(1,10),網絡結構為b=10×ones(1,10),c=zeros(4,10).
考慮到實際船舶在海上航行時主要受海浪干擾的影響,因此對海浪進行數值仿真.本文采用基于P-M譜的海浪模型[12],并采用能量等分法進行海浪建模,經計算得到5級海況下,遭遇角為30°時,海浪對首搖力矩的干擾量,如圖2所示.
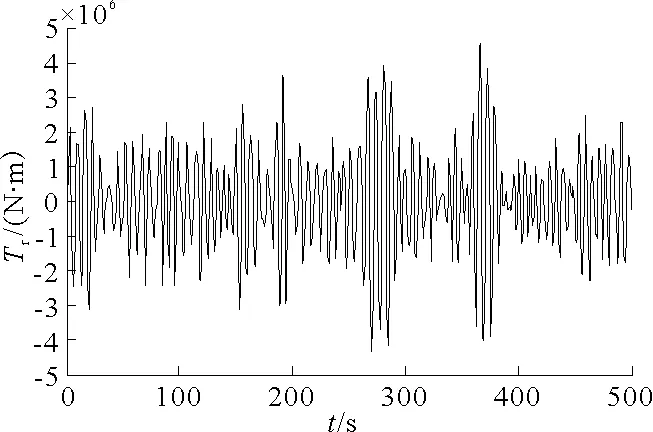
圖2 5級海況海浪作用下的干擾力矩
3.2仿真結果
本文所設計的控制器既適合對曲線航跡的跟蹤,也適用于對直線航跡的控制.將期望航跡設定為圓,設定的半徑r=80 m,期望船舶航跡的表達式為xr(t)=rsinφd,yr(t)=-rcosφd,并設定船舶的初始狀態為x=100m,y=0m,φ=0.52rad,w=0rad·s-1,v=0.12m·s-1,仿真結果見圖3~4.

圖3 船舶在(x,y)平面內的運動軌跡
圖4 船舶控制首搖力矩
3.3仿真分析
圖3表明,在標稱情況下,船舶航行軌跡能較快地以較小的誤差跟蹤上預定路徑,且穩定性較好;在存在干擾及參數攝動時,仍能較快地跟蹤上參考路徑.
圖4表明,在標稱情況下,控制器的輸出艏搖力矩曲線平滑、大小合理,并最終穩定在一個特定的值上.在存在外界干擾和參數攝動的情況下,輸出首搖力矩能夠抑制海浪的干擾,使船舶以一定精度運行在設定路徑上.
4結束語
本文在基于Serret-Frenet框架下船舶的運動方程,采用RBF神經網絡逼近控制對象中的非線性以及不確定部分,實現了設計與對象模型和參數分離,具有較強的魯棒性;考慮到船舶航行時速度量測量的可操作性較低,設計了狀態觀測器,利用船舶的航向角重構了船舶橫蕩速度及航向角速度,最后在simulink平臺下用實船參數進行了仿真,仿真結果表明,控制器具有較好的魯棒性能.
參 考 文 獻
[1]BACKSTEPPING N.Ship course controller[J].International Journal of Automation and Computating,2009,6(3):277-284.
[2]LIU Wenjiang,SUI Qingmei,XIAO Hairong,et al.Sliding backstepping control for ship course with nonlinear disturbance observer[J].Journal of Information & Computational Science,2011(8):3809- 3817.
[3]劉楊,郭晨,沈智鵬,等.欠驅動船舶路徑跟蹤的神經網絡穩定自適應控制[J].控制理論與應用,2010,27(2):169-174.
[4]朱齊丹,于瑞亭,夏桂華,等.風浪流干擾及參數不確定欠驅動船舶航跡跟蹤的滑模魯棒控制[J]. 控制理論與應用,2012,29(7):956-964.
[5]段海慶,朱齊丹.基于反步自適應神經網絡的船舶航跡控制[J].智能系統學報,2012,7(3):1-8.
[6]王志文,彭秀艷,王大巍.Serret-Frenet框架下欠驅動船的輸出反饋路徑跟蹤魯棒控制[J].船舶工程.2010,32(6):24-28.
[7]周崗,姚瓊蕓,陳永冰,等.基于輸入輸出線性化的全局直線航跡控制[J].控制理論與應用,2007,24(1):117-121.
[8]ZHANG Lijun, JIA Heming, QI Xue, NNFFC-adaptive output feedback trajectory tracking control for a surface ship at high speed[J].Ocean Engineering. 2011,38(13): 1430-1438.
[9]SKJETNE R,THOR I.Fosen.Nonlinear maneuvering and control of Ships[C].//Proceedings of OCEANS 2001 MTS/IEEE Conference and Exhibition, 2001:1808-1815.
[10]劉金琨.滑模變結構控制MATAB仿真[M].北京:清華大學出版社,2005.
[11]胡德文,王正志,王耀南,等.神經網絡自適應控制[M].長沙:國防科技大學出版社,2004.
[12]黨祎.基于神經網絡的船舶航向PID控制研究[D].哈爾濱:哈爾濱工程大學,2011.
中圖法分類號:TP183
doi:10.3963/j.issn.2095-3844.2015.01.041
收稿日期:2014-07-09
Neural Sliding Mode Control for
Tracking of Ships under Serret-renet Frame
LI XiangpingWU HansongRUAN Miaofeng
(CollegeofElectricalEngineering,NavalUniversityofEngineering,Wuhan430033,China)
Abstract:Aiming at the problem of path following of underacuated ships at a constant speed, a neural sliding mode algorithm based on input-output linearization under serret-frenet frame was designed. This algorithm uses the deduction form of ship motion equation under serret-frenet frame to converts the problem above into a case similar to straight line path following and employs neural network to optimize approaching law sliding mode control(ALSMC). It solves the dependency on system model of ALSMC and then improves the robust of controller. To eliminate the influence on control effect brought by measurement error of system state variables, a state observer was designed to reconstruct states of the controlled plant. Simulations on the condition without disturbance and with disturbance also with parameters perturbation indicate that this control law has a good performance index.
Key words:underactuated surface ships;path following; input-output linearization; neural siding-mode control
