一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法
2016-01-04 08:02:43潘林,蔡昌盛,戴吾蛟等
測繪通報(bào) 2015年2期
引文格式: 潘林,蔡昌盛,戴吾蛟,等. 一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法[J].測繪通報(bào),2015(2):5-9.DOI:10.13474/j.cnki.11-2246.2015.0030
一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法
潘林,蔡昌盛,戴吾蛟,朱建軍
(中南大學(xué)地球科學(xué)與信息物理學(xué)院,湖南 長沙 410083)
An Approach Using Multi-epoch Observations of Combined GPS/BeiDou
Single Point Positioning
PAN Lin,CAI Changsheng,DAI Wujiao,ZHU Jianjun
摘要:在GPS/BDS組合單點(diǎn)定位中,定位精度受觀測信息量影響很大,但觀測時(shí)段中不可避免地會(huì)有個(gè)別歷元觀測信息過少,導(dǎo)致這些歷元的定位精度很差。基于此,本文提出了一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法,以彌補(bǔ)單歷元方法中單個(gè)歷元觀測信息量不足的缺點(diǎn)。利用開闊環(huán)境和遮擋環(huán)境下的觀測數(shù)據(jù)進(jìn)行分析,結(jié)果表明,在GPS單系統(tǒng)、北斗單系統(tǒng)及GPS/BDS組合系統(tǒng)單點(diǎn)定位中,多歷元方法的定位精度均優(yōu)于單歷元方法。
關(guān)鍵詞:GPS;北斗;單點(diǎn)定位;定位精度;多歷元
中圖分類號(hào):P228.4文獻(xiàn)標(biāo)識(shí)碼:B
收稿日期:2013-11-14
基金項(xiàng)目:國家自然科學(xué)基金(41004011);湖南省國土資源廳科技項(xiàng)目(2012-41)
作者簡介:潘林(1989—),男,碩士生,主要研究方向?yàn)楸倍窋?shù)據(jù)處理和精密單點(diǎn)定位。E-mail:panlin_1989@163.com
一、引言
北斗區(qū)域衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou navigation satellite system,BDS)于2012年12月27日開始組網(wǎng)運(yùn)行,面向我國及周邊地區(qū)提供定位精度10m、測速精度0.2m/s、授時(shí)精度10ns的開放服務(wù)。BDS由14顆衛(wèi)星構(gòu)成,包括5顆地球靜止軌道(GEO)衛(wèi)星、5顆傾斜地球同步軌道(IGSO)衛(wèi)星和4顆中圓地球軌道(MEO)衛(wèi)星。預(yù)計(jì)到2020年左右,建成覆蓋全球的導(dǎo)航系統(tǒng),完整星座由5顆GEO衛(wèi)星、3顆IGSO衛(wèi)星和27顆MEO衛(wèi)星組成(http:∥www.beidou.gov.cn/)。
相比單系統(tǒng),雙系統(tǒng)、多系統(tǒng)組合具有明顯的優(yōu)勢,可以大大增加可視衛(wèi)星數(shù),改善衛(wèi)星幾何結(jié)構(gòu),提高定位的精度、可靠性和效率[1]。在未來多GNSS系統(tǒng)共存的格局下,進(jìn)行雙系統(tǒng)、多系統(tǒng)組合已成為衛(wèi)星導(dǎo)航和定位應(yīng)用發(fā)展的一個(gè)必然趨勢。
在GPS/BDS組合單點(diǎn)定位中,定位精度受觀測信息量影響很大,但觀測時(shí)段中不可避免地會(huì)有個(gè)別歷元觀測信息過少,導(dǎo)致這些歷元的定位精度很差。基于此,本文提出了一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法,以彌補(bǔ)單歷元方法中單個(gè)歷元觀測信息量不足的缺點(diǎn)。筆者利用開闊環(huán)境和遮擋環(huán)境下的觀測數(shù)據(jù),對多歷元方法的可行性進(jìn)行了分析,并與單歷元方法的結(jié)果進(jìn)行了對比。
二 、GPS/BDS組合單點(diǎn)定位方法
1. GPS/BDS組合單點(diǎn)定位觀測模型
對于GPS/BDS單頻偽距組合單點(diǎn)定位,其基本觀測方程表示如下[2]
(1)
(2)
式中,g和b分別表示一顆GPS衛(wèi)星和一顆北斗衛(wèi)星;P是衛(wèi)星第一個(gè)頻率上的偽距觀測值,單位m;ρ是衛(wèi)星與接收機(jī)之間的幾何距離,單位m;c是光速,m/s;dt是接收機(jī)鐘差,單位s;dtsys是GPS-BDS時(shí)間差,單位s;dT是衛(wèi)星鐘差,單位s;dorb是衛(wèi)星軌道誤差,單位m;dtrop是對流層延遲誤差,單位m;dion是電離層延遲誤差,單位m;ε包含觀測噪聲與多路徑誤差,單位m。
在式(1)、式(2)中,對流層延遲誤差通過Saastamoinen模型[3]改正,電離層延遲誤差通過Klobuchar模型[4]改正,衛(wèi)星位置和衛(wèi)星鐘差通過廣播星歷計(jì)算得到。北斗的坐標(biāo)系統(tǒng)為2000國家大地坐標(biāo)系統(tǒng)(CGCS2000),GPS的坐標(biāo)系統(tǒng)為WGS-84,但兩個(gè)坐標(biāo)系統(tǒng)相差僅在厘米級(jí),而單頻偽距單點(diǎn)定位的精度在米級(jí),故在解算過程中無須進(jìn)行坐標(biāo)轉(zhuǎn)換[5]。北斗的時(shí)間系統(tǒng)為北斗時(shí),GPS的時(shí)間系統(tǒng)為GPS時(shí),兩時(shí)間系統(tǒng)除了有一個(gè)14s的偏差外[5],還有一個(gè)小于1s且隨時(shí)間變化的偏差,因此需要估計(jì)一個(gè)額外的GPS-BDS時(shí)間差參數(shù)。忽略軌道誤差及殘留的衛(wèi)星鐘差后,待估參數(shù)包括三維位置坐標(biāo)、接收機(jī)鐘差及GPS-BDS時(shí)間差。
2. 多歷元單點(diǎn)定位方法
在單點(diǎn)定位中,定位精度受觀測信息量影響很大,但觀測時(shí)段中不可避免地會(huì)有個(gè)別歷元觀測信息過少,導(dǎo)致這些歷元的定位精度很差。基于此,考慮聯(lián)合多個(gè)歷元的觀測信息進(jìn)行定位,以彌補(bǔ)單歷元方法中單個(gè)歷元觀測信息量不足的缺點(diǎn),這就是多歷元單點(diǎn)定位方法的主要思想。
由于本文只是驗(yàn)證,以及和單歷元方法相比,多歷元方法是否能夠有效改善定位精度,因此只處理了靜態(tài)觀測數(shù)據(jù)。在靜態(tài)觀測中,接收機(jī)的位置是不變的,但由于接收機(jī)鐘漂的存在,每個(gè)歷元的接收機(jī)鐘差和GPS-BDS時(shí)間差參數(shù)是不同的,因此與單歷元方法相比,多歷元方法中每增加一個(gè)歷元的觀測信息,待估參數(shù)就增加一個(gè)接收機(jī)鐘差參數(shù)和一個(gè)GPS-BDS時(shí)間差參數(shù)。如果多歷元方法中歷元的個(gè)數(shù)為m,則單系統(tǒng)定位的參數(shù)個(gè)數(shù)為3+m,包括3個(gè)位置坐標(biāo)參數(shù)和m個(gè)接收機(jī)鐘差參數(shù);雙系統(tǒng)定位的參數(shù)個(gè)數(shù)為3+2m,相比單系統(tǒng)增加了m個(gè)GPS-BDS時(shí)間差參數(shù)。需要說明的是,本文使用的是多歷元遞推的方法,如果多歷元方法中歷元的個(gè)數(shù)為m,則從第m個(gè)歷元開始解算,第m個(gè)歷元利用1到m歷元的觀測信息,第m+1個(gè)歷元利用2到m+1歷元的觀測信息,依此類推直至最后一個(gè)歷元。
3. GPS/BDS組合單點(diǎn)定位定權(quán)方法
在GPS/BDS組合單點(diǎn)定位中,涉及兩個(gè)不同衛(wèi)星系統(tǒng)的觀測值,因此需要確定這兩個(gè)衛(wèi)星系統(tǒng)觀測值的合理權(quán)比。目前,主要有兩種方法來獲得這一權(quán)比:一種是先驗(yàn)定權(quán),即得到兩衛(wèi)星系統(tǒng)觀測值的先驗(yàn)方差[2];另一種是驗(yàn)后定權(quán),如Helmert方差分量估計(jì)[6]。
先驗(yàn)定權(quán)方法可以粗略地獲得GPS與北斗這兩個(gè)衛(wèi)星系統(tǒng)觀測值的合理權(quán)比,但需要得到兩衛(wèi)星系統(tǒng)觀測值的先驗(yàn)方差。但由于受到多種誤差的綜合影響,先驗(yàn)方差通常不能準(zhǔn)確獲得。在具體實(shí)施的過程中,通常是選擇較長時(shí)間的觀測數(shù)據(jù)進(jìn)行測試,不斷調(diào)整兩衛(wèi)星系統(tǒng)觀測值的先驗(yàn)方差,即兩衛(wèi)星系統(tǒng)觀測值的權(quán)比[2],獲得最優(yōu)定位精度的權(quán)比即為兩衛(wèi)星系統(tǒng)觀測值的合理權(quán)比。
Helmert驗(yàn)后方差分量估計(jì)是一種典型的驗(yàn)后定權(quán)方法。它的基本思想是首先根據(jù)驗(yàn)前估計(jì)權(quán)進(jìn)行預(yù)平差,用平差后得到的殘差信息來估計(jì)觀測值的方差,根據(jù)方差的估計(jì)值重新進(jìn)行定權(quán),以改善初始權(quán)值,然后根據(jù)重新確定的權(quán)值再次進(jìn)行平差,如此重復(fù)進(jìn)行,直至不同類觀測值的權(quán)趨于合理,詳細(xì)處理過程見文獻(xiàn)[6]。
三、觀測環(huán)境與數(shù)據(jù)采集
為了測試多歷元單點(diǎn)定位方法的可行性,特采集了開闊環(huán)境和遮擋環(huán)境下的觀測數(shù)據(jù)進(jìn)行分析。開闊環(huán)境觀測點(diǎn)位于中南大學(xué)附近的一棟居民樓樓頂,如圖1(a)所示。遮擋環(huán)境觀測點(diǎn)位于中南大學(xué)采礦樓前的一片樹林區(qū)域中,如圖1(b)所示。在開闊環(huán)境觀測中,衛(wèi)星信號(hào)沒有任何遮擋。在遮擋環(huán)境觀測中,部分衛(wèi)星信號(hào)會(huì)被樹葉遮擋。

圖1 GPS/BDS野外數(shù)據(jù)采集
采集數(shù)據(jù)的接收機(jī)是由南方測繪公司生產(chǎn),接收機(jī)型號(hào)是SOUTH S82-C。該接收機(jī)可以輸出采樣率為1Hz的GPS L1/L2雙頻數(shù)據(jù)和北斗B1/B2雙頻數(shù)據(jù)。采集數(shù)據(jù)時(shí)截止高度角設(shè)為10°,采樣間隔設(shè)為30s。開闊環(huán)境數(shù)據(jù)在2013年4月10日采集,觀測時(shí)間段為00:00—23:15(GPS時(shí))。遮擋環(huán)境數(shù)據(jù)在2013年3月25日采集,觀測時(shí)間段為04:30—09:30。由于導(dǎo)航用戶大多使用單頻接收機(jī),因此只利用L1/B1上的偽距觀測值進(jìn)行分析。
四、結(jié)果與分析
本文選擇4種方案用于GPS/北斗組合單點(diǎn)定位:第1種是采用先驗(yàn)定權(quán)的單歷元定位方法;第2種是采用先驗(yàn)定權(quán)的多歷元定位方法;第3種是采用驗(yàn)后定權(quán)即Helmert方差分量估計(jì)的單歷元定位方法;第4種是采用驗(yàn)后定權(quán)的多歷元定位方法。
利用測站所測GPS數(shù)據(jù)進(jìn)行精密單點(diǎn)定位[7]獲得的位置解作為參考坐標(biāo),從而對各方案的定位精度進(jìn)行評(píng)估。
在使用方案1和方案2之前,必須首先通過先驗(yàn)定權(quán)方法獲得GPS與BeiDou這兩個(gè)衛(wèi)星系統(tǒng)觀測值的合理權(quán)比。選取開闊環(huán)境數(shù)據(jù)進(jìn)行單歷元單點(diǎn)定位分析。圖2所示是GPS/BDS組合單點(diǎn)定位取不同權(quán)比時(shí)三維定位誤差的RMS統(tǒng)計(jì)值。從圖2中可知,當(dāng)權(quán)比為1∶1,即GPS與BeiDou的先驗(yàn)方差相等時(shí),定位精度最高。因此在方案1和方案2中,取兩衛(wèi)星系統(tǒng)觀測值的權(quán)比為1∶1。
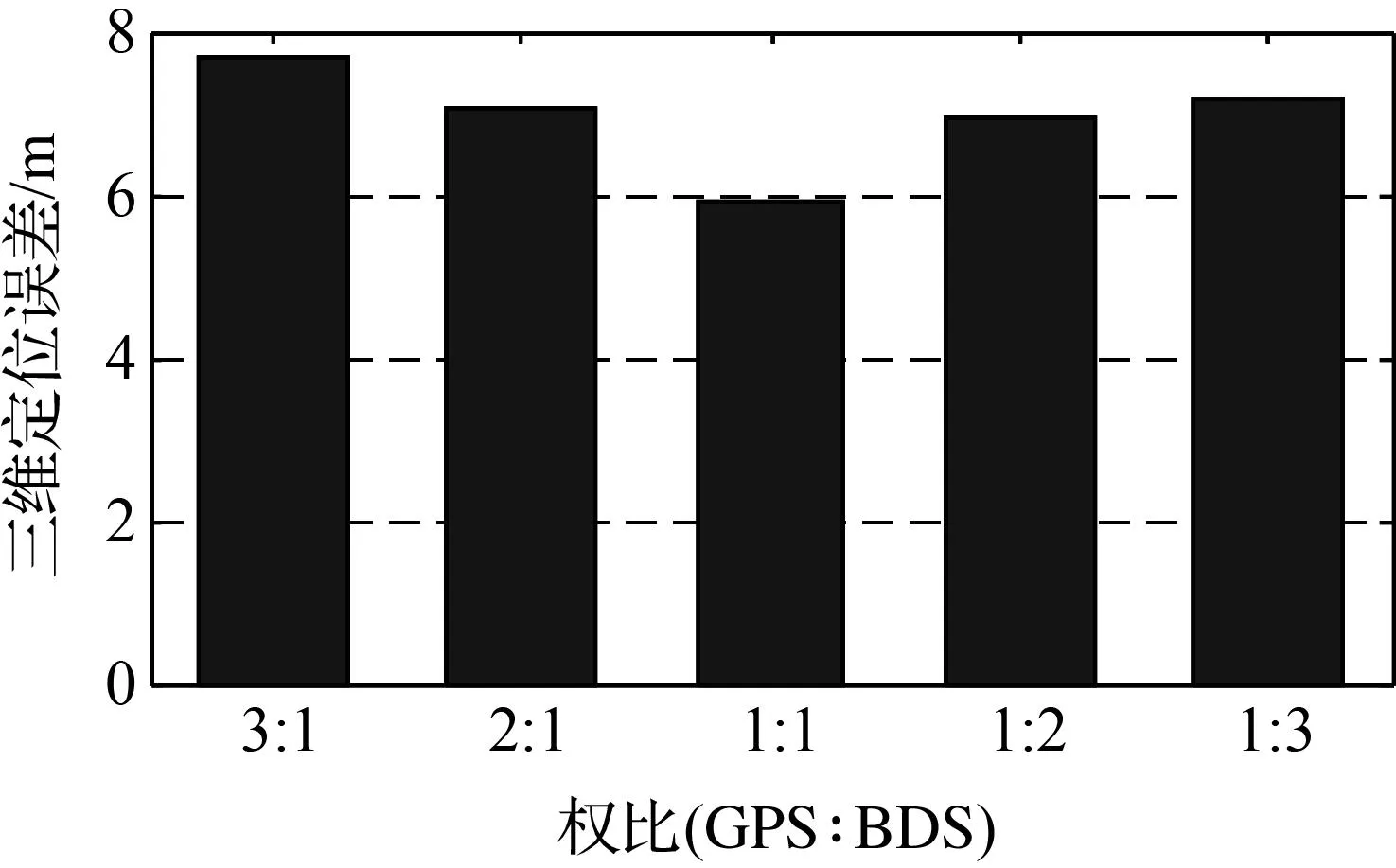
圖2 GPS/BDS組合單點(diǎn)定位取不同權(quán)比時(shí)三維定位誤差的RMS統(tǒng)計(jì)值
在使用方案2和方案4之前,必須首先確定多歷元單點(diǎn)定位方法中取多少個(gè)歷元的觀測信息才是最合理的。表1所示是開闊環(huán)境數(shù)據(jù)采用多歷元單點(diǎn)定位方法取不同歷元個(gè)數(shù)時(shí)三維定位誤差的RMS統(tǒng)計(jì)值。從表1中可知,隨著歷元個(gè)數(shù)的增多,定位精度不斷提高,但歷元個(gè)數(shù)從2變到3時(shí),定位精度改善并不明顯,為兼顧算法的計(jì)算效率,在方案2和方案4中,多歷元單點(diǎn)定位方法的歷元個(gè)數(shù)取2。
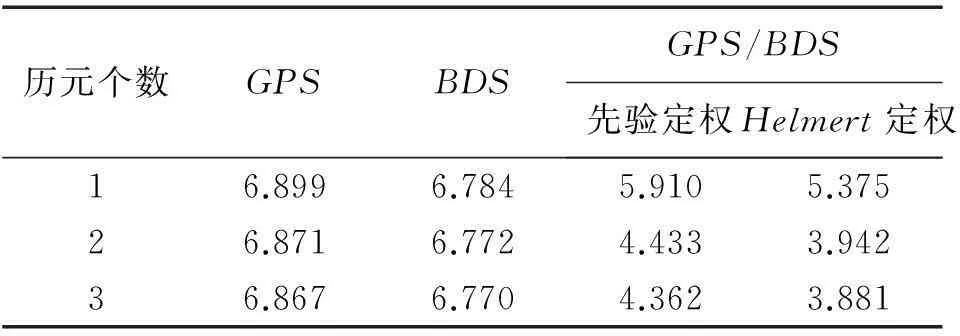
表1 多歷元單點(diǎn)定位方法取不同歷元個(gè)數(shù)時(shí)三維定位誤差的 RMS統(tǒng)計(jì)值 m
為了進(jìn)一步驗(yàn)證所取權(quán)比的合理性,特求取了GPS/BDS組合單點(diǎn)定位取不同權(quán)比時(shí)GPS與BDS衛(wèi)星偽距觀測值的殘差。表2所示是GPS與BDS衛(wèi)星偽距觀測值殘差的RMS統(tǒng)計(jì)值。從表2可知,當(dāng)權(quán)比為1∶1時(shí),GPS與BDS衛(wèi)星偽距觀測值殘差最小,因此方案1和方案2中取兩衛(wèi)星系統(tǒng)觀測值的權(quán)比為1∶1是合理的。從表2中還可知,除權(quán)比為3∶1之外,BDS衛(wèi)星的殘差值均小于GPS。圖3所示是GPS/BDS組合單點(diǎn)定位取權(quán)比為1∶1時(shí)各GPS與BDS衛(wèi)星偽距觀測值的殘差值。從圖3可知,兩衛(wèi)星系統(tǒng)絕大部分歷元的殘差值在5m以內(nèi),并且BDS衛(wèi)星的殘差值較GPS更加穩(wěn)定,造成這種現(xiàn)象的原因是大部分時(shí)間BDS衛(wèi)星的高度角均較高[4]。
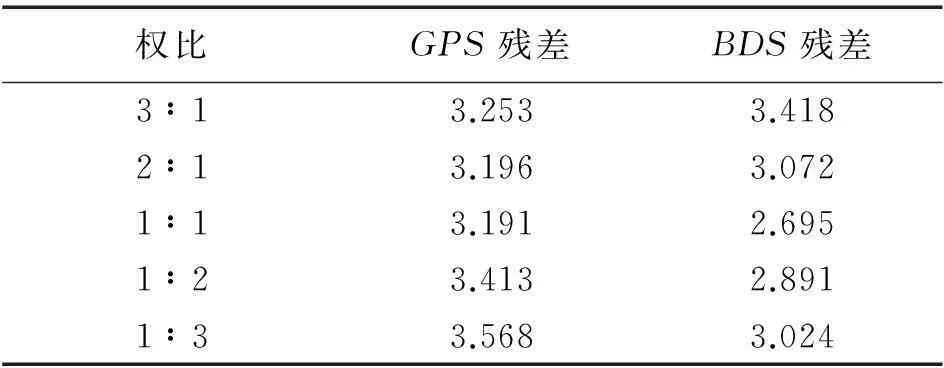
表2 GPS/ BDS組合單點(diǎn)定位取不同權(quán)比時(shí) GPS與 BDS衛(wèi)星偽距觀測值殘差的 RMS統(tǒng)計(jì)值 m
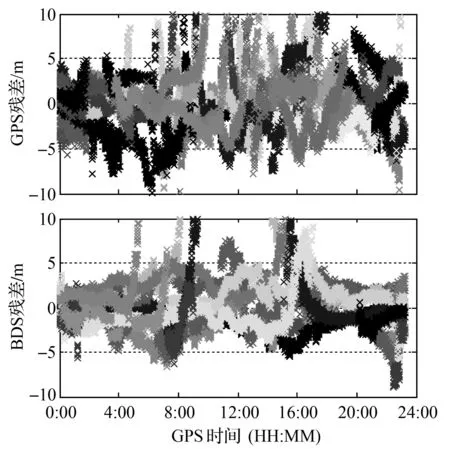
圖3 各GPS衛(wèi)星與北斗衛(wèi)星偽距觀測值殘差
為了比較方案1、2和方案3、4所得到的兩衛(wèi)星系統(tǒng)觀測值的權(quán)比是否一致,使用Helmert方差分量估計(jì)方法定權(quán),分別采用單歷元方法和多歷元方法處理開闊環(huán)境數(shù)據(jù),求取兩衛(wèi)星系統(tǒng)觀測值的收斂權(quán)比,結(jié)果如圖4所示。據(jù)統(tǒng)計(jì),單歷元方法中,Helmert方差分量估計(jì)方法所得權(quán)比為0.53~1.98,均值為1.02,STD(standarddeviation)值為0.25;多歷元方法中,權(quán)比為0.70~1.65,均值為1.00,STD值為0.16。因此,Helmert方差分量估計(jì)方法所得權(quán)比與先驗(yàn)定權(quán)方法是一致的。并且,與單歷元方法相比,多歷元方法所得權(quán)比更加穩(wěn)定和可靠。

圖4 Helmert方差分量估計(jì)方法收斂權(quán)比
圖5是利用開闊環(huán)境數(shù)據(jù),使用4種方案進(jìn)行GPS/BDS組合單點(diǎn)定位的結(jié)果。圖6是相應(yīng)的可見衛(wèi)星數(shù)與PDOP值。從圖5中可知,4種方案在東方向的定位誤差相差不大;方案4北方向的定位誤差要明顯小于其他3種方案;而在高程方向,有諸多時(shí)間段,如12:00和16:00附近時(shí)間段,多歷元方法的定位精度要明顯優(yōu)于單歷元方法。從圖6中可知,和單歷元方法相比,多歷元方法的可見衛(wèi)星數(shù)增加了一倍,PDOP值顯著減小,這是多歷元方法定位精度得到改善的直接原因。
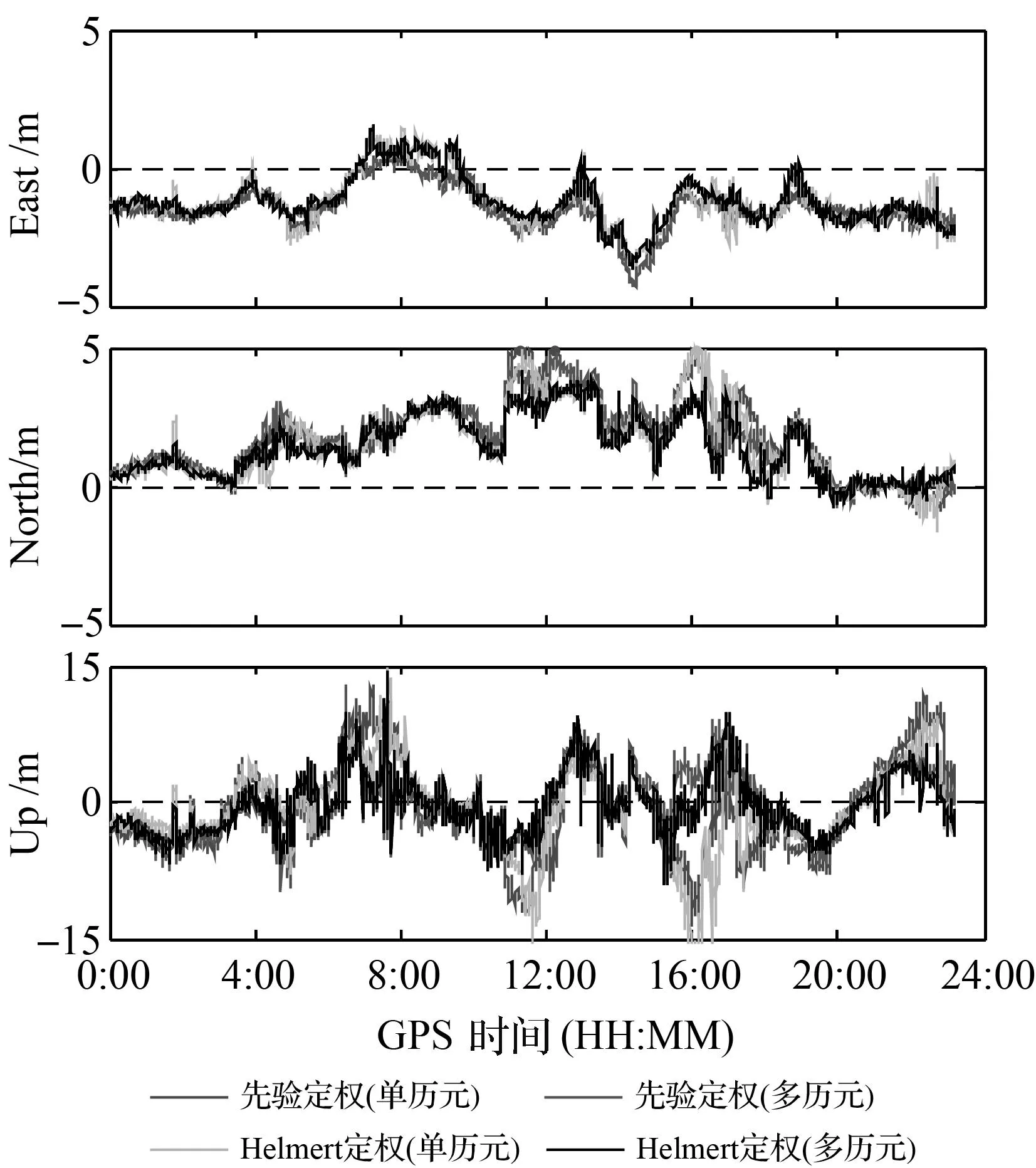
圖5 開闊環(huán)境數(shù)據(jù)GPS/BDS組合單點(diǎn)定位結(jié)果
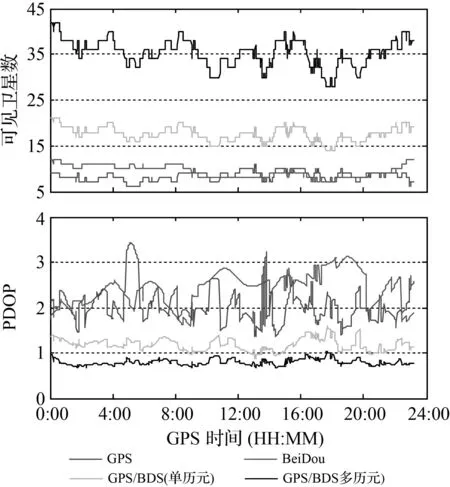
圖6 開闊環(huán)境數(shù)據(jù)可見衛(wèi)星數(shù)與PDOP值
為了分析可見條件不好情況下的定位情況,特對遮擋環(huán)境數(shù)據(jù)進(jìn)行分析。圖7是利用遮擋環(huán)境數(shù)據(jù),使用4種方案進(jìn)行GPS/BDS組合單點(diǎn)定位的結(jié)果。圖8是相應(yīng)的可見衛(wèi)星數(shù)與PDOP值。由圖8和圖6比較可知,與開闊環(huán)境相比,在遮擋環(huán)境中,可見衛(wèi)星數(shù)減少,PDOP值增大。由于沒有足夠多的多余觀測,圖7中方案3的定位結(jié)果最差,出現(xiàn)了嚴(yán)重的發(fā)散情況,而方案4中采用多歷元方法,則很好地避免了這種情況的發(fā)生。因此,在遮擋環(huán)境中沒有足夠多的多余觀測時(shí),不建議使用方案3進(jìn)行GPS/BDS組合單點(diǎn)定位。
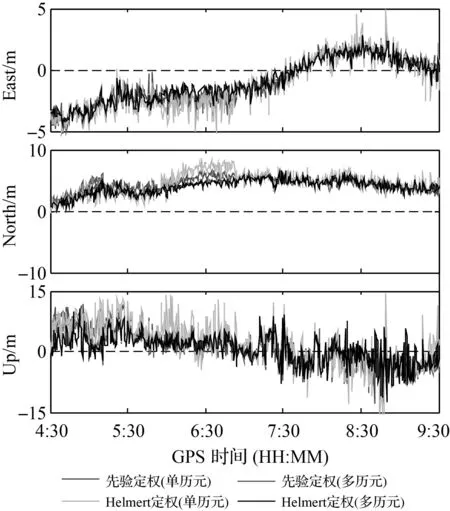
圖7 遮擋環(huán)境數(shù)據(jù)GPS/BDS組合單點(diǎn)定位結(jié)果
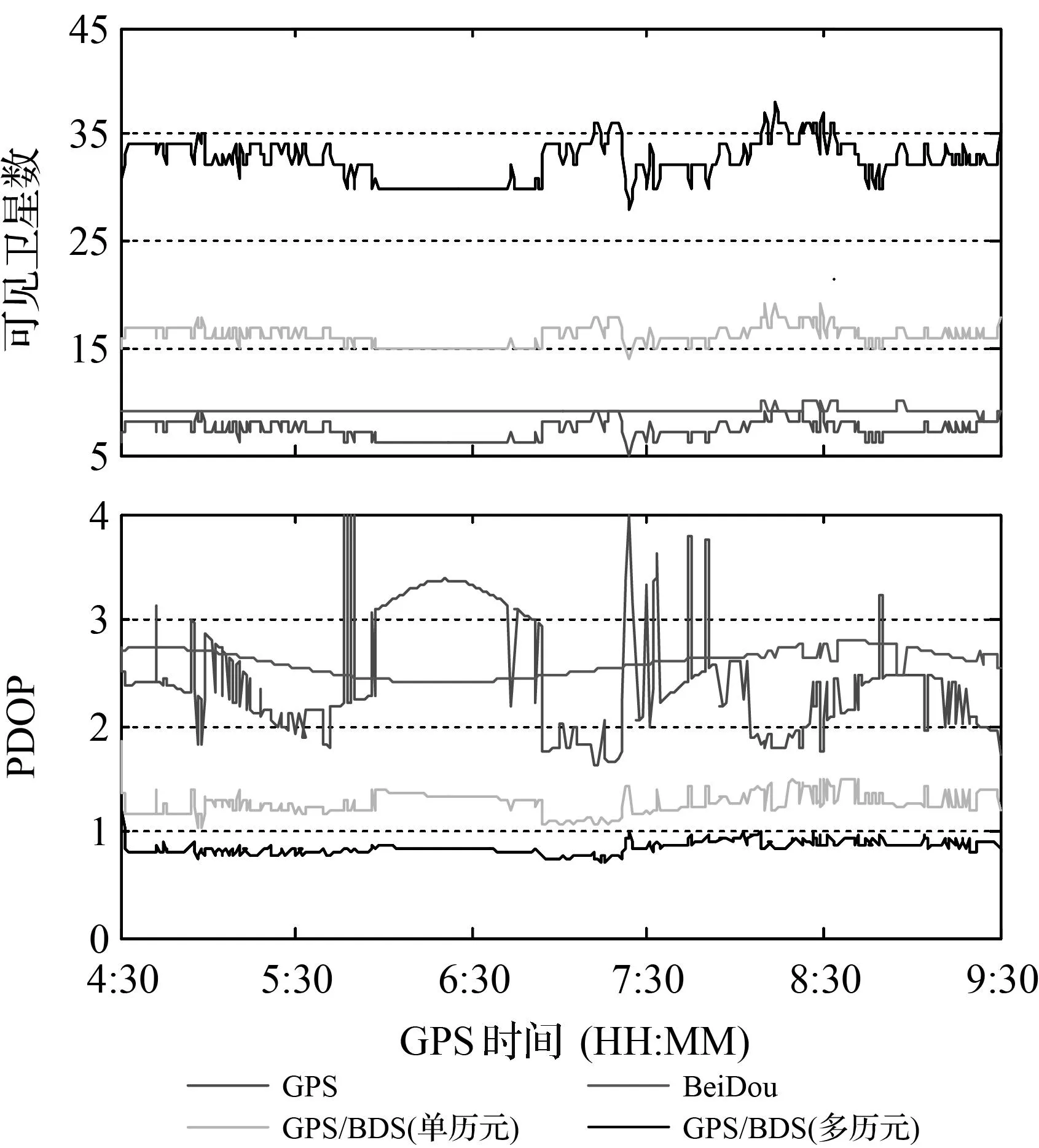
圖8 遮擋環(huán)境數(shù)據(jù)可見衛(wèi)星數(shù)與PDOP值
表3、表4是GPS單系統(tǒng)、BDS單系統(tǒng)、GPS/BDS組合系統(tǒng)單點(diǎn)定位誤差RMS統(tǒng)計(jì)值。從表中可知,BDS單點(diǎn)定位的精度達(dá)到甚至超過GPS單點(diǎn)定位的水平;雙系統(tǒng)組合單點(diǎn)定位的精度要明顯優(yōu)于單系統(tǒng)。對于單系統(tǒng)單點(diǎn)定位,在開闊環(huán)境下,與單歷元方法相比,多歷元方法的定位精度只有輕微改善;在遮擋環(huán)境下,與單歷元方法相比,多歷元方法的定位精度有顯著提高。對于GPS/BDS組合單點(diǎn)定位,無論是開闊環(huán)境還是遮擋環(huán)境,與單歷元方法相比,多歷元方法的定位精度均有顯著改善,并且精度改善主要體現(xiàn)在高程方向。從表4中可知,在所有的觀測時(shí)段中,方案4的定位精度最高。
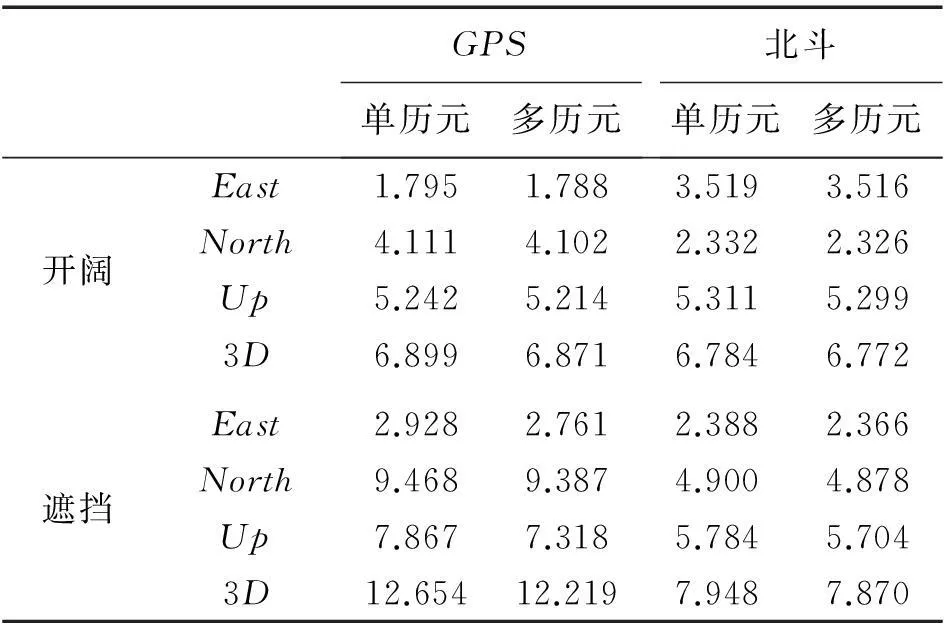
表3 GPS單系統(tǒng)、 BDS單系統(tǒng)單點(diǎn)定位誤差 RMS統(tǒng)計(jì)值 m
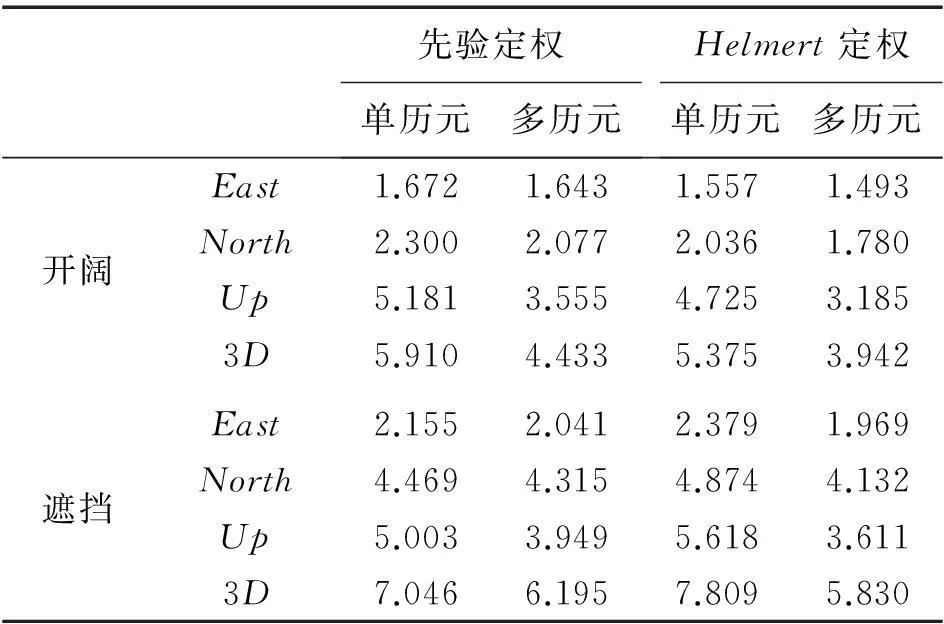
表4 GPS/ BDS組合系統(tǒng)單點(diǎn)定位誤差 RMS統(tǒng)計(jì)值 m
五、結(jié)束語
在GPS/BDS組合單點(diǎn)定位中,定位精度受觀測信息量影響很大,尤其是使用Helmert方差分量估計(jì)方法定權(quán)時(shí),如果沒有足夠多的多余觀測,會(huì)出現(xiàn)嚴(yán)重的發(fā)散現(xiàn)象。但觀測時(shí)段中不可避免地會(huì)有個(gè)別歷元觀測信息過少,導(dǎo)致這些歷元的定位精度很差。基于此,本文提出了一種聯(lián)合多歷元觀測信息的GPS/BDS組合單點(diǎn)定位方法,以彌補(bǔ)單歷元方法中單個(gè)歷元觀測信息量不足的缺點(diǎn)。利用開闊環(huán)境和遮擋環(huán)境下的觀測數(shù)據(jù)進(jìn)行分析,結(jié)果表明,在GPS單系統(tǒng)、BDS單系統(tǒng)及GPS/BDS組合系統(tǒng)單點(diǎn)定位中,和單歷元方法相比,多歷元方法的定位精度均有不同程度的改善。
本文證明了多歷元方法在單點(diǎn)定位中的可行性,但只處理了靜態(tài)觀測數(shù)據(jù)。在動(dòng)態(tài)觀測中,由于接收機(jī)位置是不斷變動(dòng)的,如果使用多歷元方法,單點(diǎn)定位的函數(shù)模型需要進(jìn)一步研究。本文為下一步的研究工作打下了基礎(chǔ),具有重要的指導(dǎo)意義。
參考文獻(xiàn):
[1]CAIC,GAOY.ACombinedGPS/GLONASSNavigationAlgorithmforUsewithLimitedSatelliteVisibility[J].JournalofNavigation, 2009, 62(4): 671-685.
[2]CAIC,GAOY,PANL.AnAnalysisonCombinedGPS/COMPASSDataQualityandItsEffectonSiglePointPositioningAccuracyunderDifferentObservingCondtions[J].AdvancesinSpaceResearch, 2013,DOI: 10.1016/j.asr.2013.02. 019.
[3]SAASTAMOINENJ.ContributiontotheTheoryofAtmosphericRefraction[J].BulletinGéodésique, 1972, 105(1):279-298.
[4]KLOBUCHARJ.IonosphericTime-DelayAlgorithmsforSingle-FrequencyGPSUsers[J].IEEETransactionsonAerospaceandElectronicSystems, 1987,AES-23(3): 325-331.
[5]SHIC,ZHAOQ,HUZ,etal.PreciseRelativePositioningUsingRealTrackingDatafromCOMPASSGEOandIGSOSatellites[J].GPSSolutions, 2012,17(1):103-119.
[6]HELMERTFR.DieAusgleichungsrechnungNachderMethodederKleinstenQuadrate[M].ZweiteAuflage:Teubner,1907.
[7]ZUMBERGEJF,HEFLINMB,JEFFERSONDC,etal.PrecisePointPositioningfortheEfficientandRobustAnalysisofGPSDatafromLargeNetworks[J].JournalofGeophysicalResearch, 1997, 102(B3):5005-5017,DOI: 10.1029/96JB03860.