TDI CCD遙感衛(wèi)星對其他衛(wèi)星成像的可行性分析
2015-12-31 11:46:30謝少波丁丕滿何赟晟徐實學
上海航天 2015年2期
謝少波,丁丕滿,何赟晟,徐實學,韓 旭
(上海衛(wèi)星工程研究所,上海 200240)
0 引言
歐空局Envisat衛(wèi)星是目前最大最先進的地球環(huán)境監(jiān)測衛(wèi)星,衛(wèi)星總質(zhì)量8 200kg,高10m,展開寬度25m,厚度5m。根據(jù)衛(wèi)星的幾何尺寸和構形,其最大有效反射截面可達約120m2。該衛(wèi)星運行于平均高度799.8km的太陽同步圓軌道,軌道傾角98.55°,降交點地方時10:00。2012年4月8日,Envisat衛(wèi)星向地面提供最后一幅遙感圖像后出現(xiàn)故障。工程人員決定利用法國昴宿星對Envisat衛(wèi)星實施成像,幫助判斷Envisat衛(wèi)星的狀況。昴宿星運行于太陽同步軌道,軌道高度695km,軌道傾角98.2°,對地最高分辨率0.5m,降交點地方時為上午10:30。根據(jù)美國提供的失控后Envisat衛(wèi)星的軌道參數(shù),2012年4月15日在昴宿星與Envisat衛(wèi)星相距約100km時,昴宿星對Envisat衛(wèi)星實施了成像作業(yè)。由此次成像任務可知,基于TDI CCD的空間相機拍攝其他衛(wèi)星是可行的。國內(nèi)對光學成像衛(wèi)星拍攝其他衛(wèi)星的可行性研究較少[1]。為此,本文對其應用的可行性進行了分析。
1 昴宿星對Envisat衛(wèi)星成像過程
昴宿星對Envisat衛(wèi)星實施的成像作業(yè)獲取的部分圖像如圖1所示。
根據(jù)軌道特征,昴宿星的運行軌道較Envisat衛(wèi)星低105km。昴宿星為對地觀測衛(wèi)星,為拍攝Envisat衛(wèi)星,昴宿星需作大角度姿態(tài)機動,由對地調(diào)整到對天姿態(tài),運行速度約7.43km/s,而Envisat衛(wèi)星的運行速度約7.37km/s。成像圖片表明:昴宿星在8min內(nèi)有效獲取了Envisat衛(wèi)星的清晰圖像至少3幅。可初步判斷在成像時刻附近,兩航天器同向交會運行。
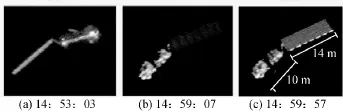
圖1 昴宿星拍攝Envisat衛(wèi)星圖片F(xiàn)ig.1 Envisat’s pictures taken by Pleiades satellite
對昴宿星與Envisat衛(wèi)星30d時長的軌道運行情況進行仿真,結果表明:兩航天器的最小距離約107.875km,與文獻中成像任務條件相似,此時,兩航天器相對運動速度約0.971km/s,運動速度矢量夾角約7.43°,如圖2所示。Envisat衛(wèi)星最大尺寸為24m,經(jīng)過昴宿星傳感器的視場時間小于0.024 7s。

圖2 昴宿星與Envisat衛(wèi)星交會速度矢量Fig.2 Crossing angle of velocity vector between Pleiades satellite and Envisat satellite
交會過程仿真結果表明:交會過程中Envisat衛(wèi)星相對昴宿星最大視運動角速度0.6(°)/s,昴宿星小角度下機動能力可達0.7(°)/s,昴宿星可實現(xiàn)姿態(tài)調(diào)整多次對Envisat衛(wèi)星進行拍攝,由此獲得多張圖片。進一步分析可知:昴宿星對Envisat衛(wèi)星成像的分辨率約0.1m/0.4m(全色/多光譜)。昴宿星對地觀測時,全色CCD行頻約10.6kHz,多光譜CCD行頻約2.7kHz,對Envisat衛(wèi)星成像時全色CCD行頻不低于9.7kHz,多光譜CCD不低于2.5kHz。太陽光矢量與航天器連線間夾角128°。
昴宿星對Envisat衛(wèi)星成功成像主要取決于兩個因素:昴宿星具備大角度姿態(tài)快速機動能力,其光軸可任意指向,尤其是可指向天頂,還能大角度調(diào)整偏航角,以此適應衛(wèi)星間相對運動矢量方向;任務選擇了合適的時機,目標距離近,亮度高,與目標航天器相對運動速度低。
2 TDI CCD遙感衛(wèi)星拍攝其他衛(wèi)星可行性
成像衛(wèi)星主要是對地成像,若拍攝其他衛(wèi)星則需要分析衛(wèi)星交會情況,必須滿足一定的限制條件。
2.1 交會方位
設成像衛(wèi)星瞬時半視場角為ω,衛(wèi)星可機動角度為θ,則衛(wèi)星的可視范圍為±(ω+θ),目標衛(wèi)星需在成像衛(wèi)星下方±(ω+θ)范圍才進入成像衛(wèi)星視場范圍,如圖3所示。
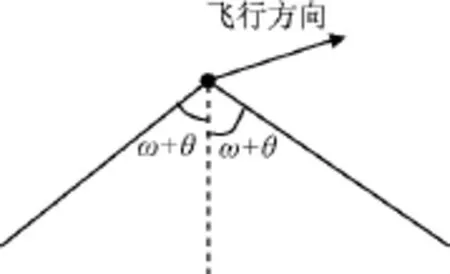
圖3 成像衛(wèi)星視場Fig.3 Field of view of imaging satellite
2.2 交會距離
兩顆衛(wèi)星的交會距離直接影響對目標星拍攝的成像分辨率。衛(wèi)星在大角度側擺時因受地球畸變的影響,分辨率下降較明顯,當成像衛(wèi)星拍攝近距離目標時,分辨率畸變的影響明顯減小。
設成像衛(wèi)星的對地成像分辨率為a,軌道高度為L,目標衛(wèi)星的軌道高度為H,成像衛(wèi)星與目標衛(wèi)星的垂直距離為h,成像衛(wèi)星的側擺角為θ,地球半徑為R(如圖4所示),則成像衛(wèi)星對目標星成像分辨率
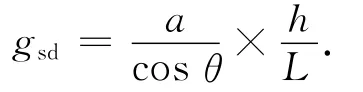
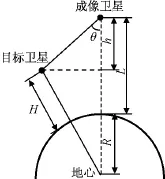
圖4 成像衛(wèi)星與目標星距離關系Fig.4 Spatial relationship between imaging and target satellite
為較清楚反映目標信息特征,對目標衛(wèi)星拍攝圖像的像元數(shù)應不小于30×15,對一個幾何尺寸為12m×6m的衛(wèi)星,則對目標衛(wèi)星拍攝分辨率gsdmin應不低于0.4m。衛(wèi)星0.4m分辨率仿真圖如圖5所示,可較清楚地描述衛(wèi)星外形特征。

圖5 分辨率0.4m衛(wèi)星仿真圖Fig.5 Satellite picture simulated with 0.4mresolution
根據(jù)上文可知兩顆衛(wèi)星垂直軌道距離和成像衛(wèi)星側擺角應滿足

由式(1)可推算出目標星的最低軌道高度Hmin和成像衛(wèi)星最大側擺角θmax的關系。成像衛(wèi)星軌道高度1 200km時目標星的Hmin見表1。
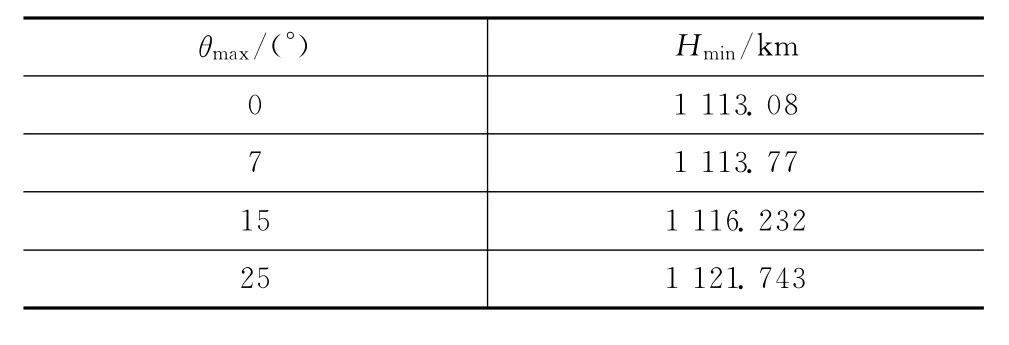
表1 不同成像衛(wèi)星機動角度時目標星HminTab.1 Minimum orbit altitude of target satellite under various imaging satellite attitude angle
2.3 交會速度
成像衛(wèi)星相機采用TDI CCD器件,為使成像圖像清晰,衛(wèi)星必須采用精準的行頻和偏流角匹配,這對交會時相對速度矢量有一定要求,分析逆向和同向兩種交會情況。
a)逆向交會
逆向交會時,一顆衛(wèi)星為降軌,另一顆衛(wèi)星為升軌,如圖6所示。
因成像行頻與目標相對拍攝衛(wèi)星的速高比成正比,對地面目標來說,相對拍攝衛(wèi)星運動速度低、距離遠,而對逆向交會的衛(wèi)星來說,相對拍攝衛(wèi)星運動速度高、距離近,因此行頻極高。
令逆向交會時成像衛(wèi)星軌道高度1 200km,則其速度7 254m/s,軌道傾角100.406°;若目標星軌道高度1 100km,則目標星的速度7 288m/s,軌道傾角100.062°。兩衛(wèi)星相對運動速度14 100m/s,理論行頻35 250Hz。拍攝衛(wèi)星針對地面成像時行頻不大于1 175Hz,星上實際行頻不及理論行頻的4%,對目標星成像實際像元數(shù)只有1個點,因此無法使用,可見逆向交會無法實現(xiàn)對目標星實現(xiàn)拍攝成像。

圖6 逆向交會Fig.6 Reverse crossing between two satellites
b)同向交會
同向交會時,因目標星軌道低,目標星運行速度較快,交會過程是目標星從成像衛(wèi)星下方追逐和超越成像衛(wèi)星,如圖7所示。同向交會時兩顆衛(wèi)星的相對運動速度很小,成像衛(wèi)星的行頻將大幅減小,如交會段在赤道附近,目標星與成像衛(wèi)星軌道傾角差異較小,成像衛(wèi)星偏流角要求很小且穩(wěn)定不變,采用固定偏流角的方式可較好適應對目標星的拍攝。若成像衛(wèi)星的實際偏流角不能采取固定偏流角模式,而是根據(jù)側擺角度及星下點緯度而變,則選擇在遠離赤道成像可減少偏流角差異的影響。
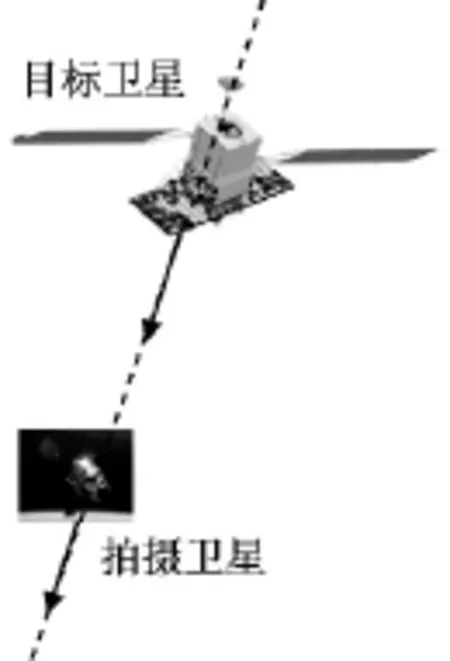
圖7 同向交會Fig.7 Forward crossing between two satellites
令同向交會時成像衛(wèi)星軌道高度為1 209km,目標星軌道高度1 100km,則兩衛(wèi)星相對運動速度34m/s;分辨率0.4m;理論行頻85Hz。衛(wèi)星實際行頻遠高于理論行頻,屬于過采樣,仍可拍攝成像。
2.4 交會光照條件
交會時應盡可能選擇目標星與地面反照率差異大的工況。目標星的反射率主要體現(xiàn)在太陽翼上,太陽翼反射率較高,可取其值為0.9。為能較好反映目標外形輪廓,背景最好選擇低反射率的海面,當選擇陸地背景時應選擇沙漠等單一背景。
3 成像衛(wèi)星與目標衛(wèi)星交會過程仿真
對軌道高度1 209km的光學衛(wèi)星對美國NROL-66衛(wèi)星進行拍攝在1年內(nèi)的交會進行了仿真。該衛(wèi)星為美國軍用衛(wèi)星,發(fā)射質(zhì)量350kg,軌道高度1 199~1 202km。仿真中設NROL-66衛(wèi)星的軌道傾角90°,采用標準極軌道,軌道平面的進動速率與太陽同步軌道不同,因此隨著時間推移,軌道面的進動總能使兩顆衛(wèi)星的軌道面近似在同一個平面,故有機會對衛(wèi)星進行成像。兩顆衛(wèi)星軌道如圖8所示。
分析對兩顆衛(wèi)星的可見性(無地球遮攔),1年內(nèi)兩顆衛(wèi)星交會有4次,起止時間見表2。表中第2、3次交會均在陰影區(qū)內(nèi),不具備成像條件。以第1次交會為例,分析兩顆衛(wèi)星的距離、速度等相對關系是否滿足成像要求。交會時兩顆衛(wèi)星相對距離和徑向速度如圖9所示。由圖可知:兩顆衛(wèi)星最小距離34km,對應時刻的徑向速率小于50m/s。
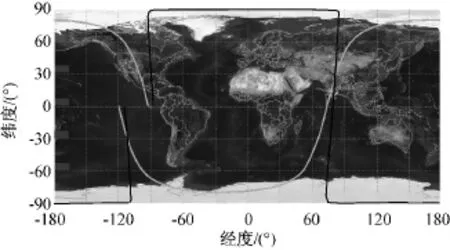
圖8 成像衛(wèi)星與目標星軌道Fig.8 Orbits of imaging and target satellite

表2 交會時機仿真結果Tab.2 Simulation result of crossing opportunities
交會過程目標星相對成像衛(wèi)星的俯仰角、方位角及其角速率分別如圖10、11所示。交會過程目標星光照條件如圖12所示。
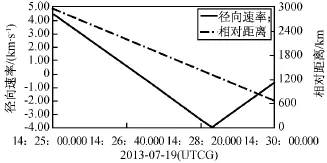
圖9 目標星相對成像衛(wèi)星距離和徑向速度Fig.9 Distance and radial velocity of target satellite relate to imaging satellite
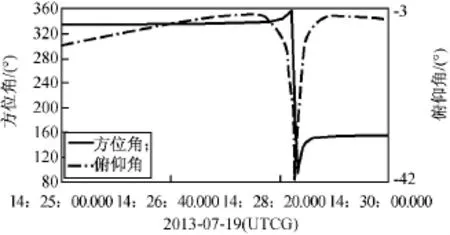
圖10 交會方位角和俯仰角仿真結果Fig.10 Change of azimuth and elevation crossing angle
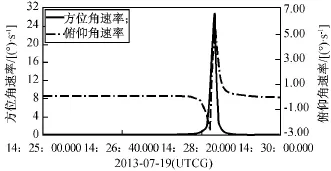
圖11 方位角和俯仰角速率仿真結果Fig.11 Changing rate of azimuth and elevation crossing angle
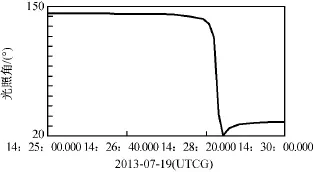
圖12 光照角仿真結果Fig.12 Simulation results of incident angle of sunlight
由圖10可知:方位角和俯仰角規(guī)律表示其為逆向交會,故無法成像。第4次交會與第1次交會類似,在1年內(nèi)無有效成像時機。
4 結束語
本文受昴宿星拍攝Envisat衛(wèi)星啟發(fā),對昴宿星拍攝Envisat衛(wèi)星過程進行了分析,討論了TDI CCD光學遙感衛(wèi)星拍攝其他衛(wèi)星的技術要點,研究了交會的方位、距離、速度和光照條件等因素的影響,并進行了仿真分析。此方法和過程對TDI CCD遙感衛(wèi)星拍攝其他衛(wèi)星任務有一定的參考作用。
[1] 李雁斌,江利中,黃 勇,等.天基目標探測與監(jiān)視系統(tǒng)發(fā)展研究[J].制導與引信,2012,33(3):50-60.