InSAR編隊衛(wèi)星波束同步姿態(tài)策略分析
2015-12-31 11:57:26王文妍
上海航天 2015年2期
槐 超,王文妍
(上海航天控制技術研究所,上海 200233)
0 引言
InSAR編隊通過多顆衛(wèi)星的協同工作,實現地形高程測量、地面動目標檢測(GMTI)等功能。系統(tǒng)高效工作的前提是良好的多星波束同步,即編隊中各衛(wèi)星地面觀測區(qū)域盡可能重合,這需要對衛(wèi)星進行合理的軌道構型設計和姿態(tài)規(guī)劃。以往的研究多側重于軌道構型,對基于波束同步的姿態(tài)規(guī)劃則較少論及。文獻[1]定性分析了干涉車輪系統(tǒng)對天線波束指向同步的要求;文獻[2]討論了軌道平行的星載雙站SAR系統(tǒng)的波束同步;文獻[3]提出了一種基于波束指向同步的波束同步方法,并給出了六種同步方案;文獻[4]考慮了主星偏航導引要求的系統(tǒng)波束同步方案,給出了波束覆蓋同步的姿態(tài)策略,取得了較好的同步效果。需要指出的是,針對后期成像處理問題,SAR衛(wèi)星,尤其是X波段SAR衛(wèi)星需進行偏航和俯仰二維導引,使雷達波束中心盡量指向零多普勒點,即實現全零多普勒導引[5]。以往文獻對此很少涉及。
本文以文獻[4]的波束覆蓋同步方案為基礎,同時考慮主星的偏航和俯仰二維導引,給出從星的姿態(tài)規(guī)劃策略,并分析這種波束覆蓋同步情況下從星的多普勒中心頻率。然后,通過對全零多普勒導引方法的分析,提出一種綜合考慮波束同步和全零多普勒的姿態(tài)規(guī)劃方案。據此方案,在編隊中所有衛(wèi)星均實現全零多普勒導引的同時,可使各衛(wèi)星對地觀測區(qū)域重疊率最大。
1 波束覆蓋同步策略
波束同步可分為波束指向同步和波束覆蓋同步。前者要求各星的SAR天線中心指向地面同一點;后者還要求各星波束以近似相同的方位照射地面目標區(qū)域,以進一步提高波束同步效果和干涉成像質量。本文研究了考慮主星二維導引的編隊波束覆蓋同步姿態(tài)策略。為不失一般性,以由兩顆衛(wèi)星組成的“一發(fā)雙收”主從雙星編隊為例進行討論。
1.1 相關坐標系
慣性系采用地心赤道慣性坐標系。衛(wèi)星的軌道坐標系定義為:原點O在衛(wèi)星質心;OZ軸在軌道面內指向地心;OX軸在軌道面內與OZ軸垂直且指向衛(wèi)星飛行方向;OY軸與OX、OZ軸構成右手系。SAR天線與星體固聯。初始時各坐標系的相互關系和SAR天線安裝如圖1所示。其中,初始的衛(wèi)星本體系與軌道系重合;Os-XsYsZs為SAR天線坐標系;α為天線安裝下視角。因本文僅涉及各坐標系間的轉動關系,故將點O與點Os視為同一點;OsXs軸沿SAR天線平面的法線方向,即SAR天線中心的波束照射方向;OsYs軸沿SAR天線的長度方向。
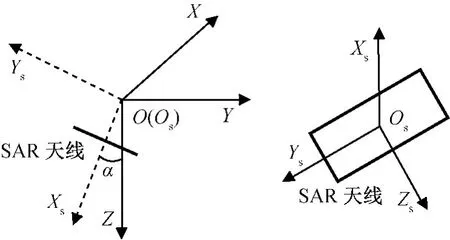
圖1 SAR天線安裝示意Fig.1 SAR antenna installation
1.2 姿態(tài)規(guī)劃
為保證主星的全零多普勒,主星采用二維導引姿態(tài),從星根據主星進行姿態(tài)調整以實現編隊的波束覆蓋同步。從星姿態(tài)策略規(guī)劃如下:若已知初始時從星SAR天線坐標系三個坐標軸在其軌道坐標系中的表示為[XssYssZss],進行從星姿態(tài)導引后SAR天線坐標系三個坐標軸在軌道系中的表示為[XseYseZse],則有

求得后,再根據特定轉序,即可求出從星姿態(tài)導引對應的歐拉角,從而完成從星的姿態(tài)規(guī)劃策略。
以下分別求取[XssYssZss],[XseYseZse]中的各量。
首先,根據天線安裝方位,可求[XssYssZss]。
其中,Xss=[0 -sinαcosα]T,[1 0 0]T=Zss,Yss= [0 -cosα-sinα]T。
其次求Xse,Yse,Zse。
a)Xse
Xse為從星進行姿態(tài)導引后的天線中心波束指向向量。波束覆蓋同步的雙星InSAR編隊觀測關系如圖2所示。圖中:S1為主星;S2為從星;T為兩星波束中心指向的地面目標點。
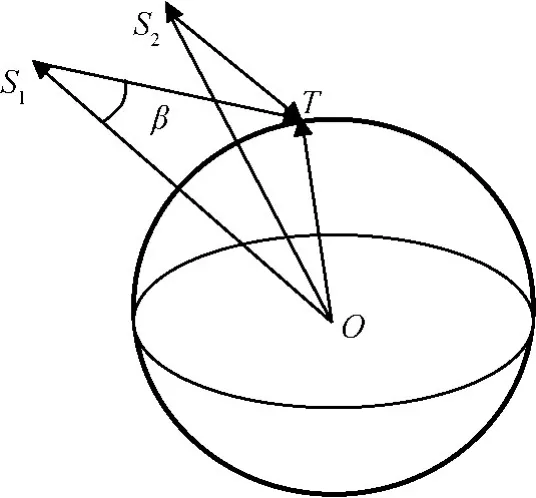
圖2 InSAR編隊觀測示意(1)Fig.2 Observation 1of InSAR formation
則有

由各星的軌道數據可求得OS1,OS2在慣性系中的表示,有

式中:nS1T為S1T的單位向量,在慣性系中
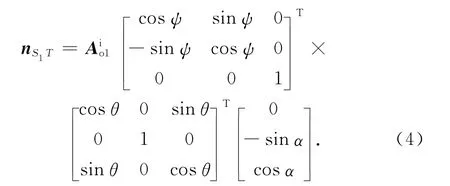
此處:1為主星軌道系到慣性系的姿態(tài)陣;ψ為主星偏航角;θ為主星俯仰角。|S1T|可在三角形OS1T中解出。S1T的方向就是主星經過二維導引后SAR天線視線軸方向,即圖2中的β。β可通過轉動幾何關系得到,

至此,式(2)中各量在慣性系中的表示均已求出。再由軌道數據轉到從星的軌道系,進行單位化,即可得Xse。
b)Yse
因衛(wèi)星飛行方向與其星下點軌跡方向近似平行,SAR天線OsYs軸在軌道系XOY面內的投影與OY軸間的夾角(設此角為σ2,相應地主星此角為σ1)應與地面觀測投影區(qū)橢圓長軸與星下點軌跡之間的夾角近似相同,如圖3所示。當兩星相距較近時,可認為其星下點軌跡平行。因此,為達到兩星波束覆蓋橢圓長短半軸分別平行的波束同步效果,需保證σ1=σ2。
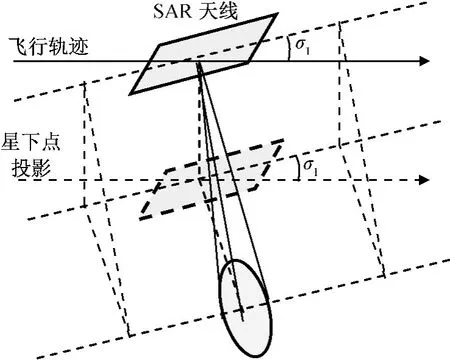
圖3 星地關系Fig.3 Relationship of satellite and earth
對主星,二維導引后OsYs軸在主星軌道系中可表示為

由此可求得σ1。
采用文獻[4]中的方法求取從星σ2。設從星OsYs軸在其軌道系中的方位角和高低角分別為ζα,ζβ,則有
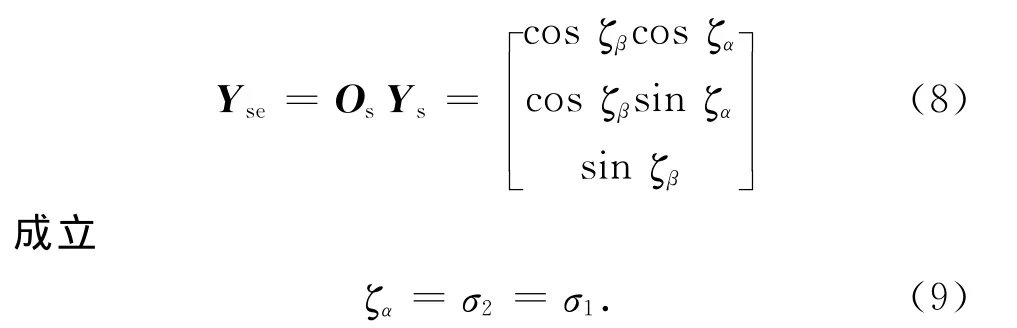
又因OsXs、OsYs軸垂直,有

因OsXs已知,故由式(9)、(10)可求得ζβ。至此可得Yse。
c)Zse
因Xse,Yse,Zse相互正交,故有

求出[XssYssZss],[XseYseZse]各量后,即可得Aob。根據特定轉序轉成歐拉角,就完成了從星的波束覆蓋姿態(tài)規(guī)劃策略。
2 多普勒中心頻率分析
對一發(fā)雙收的InSAR編隊,主星自發(fā)自收,其多普勒中心頻率

從星僅接收從主星發(fā)射經地面反射的回波,其圖像的多普勒中心頻率

式中:Vst1,Vst2分別為主從星相對地面目標點的速度矢量;R1,R2分別為主從星相對地面目標點的斜距矢量,且R1=|R1|,R2=|R2|。
為減小多普勒質心去相干對測高精度的影響,理想的波束同步策略是使主從星兩幅圖像的多普勒中心頻率盡量相同且最好為零,同時兼顧觀測區(qū)域的重疊率。通過分析基于全零多普勒的二維導引規(guī)律,發(fā)現SAR天線下視角對多普勒中心頻率的影響極小[5]。即衛(wèi)星采用二維導引后,不僅SAR天線中心的多普勒頻率為零,在整個SAR天線距離向中心線上的多普勒頻率也都近似為零。因此,二維導引后再對衛(wèi)星進行滾動調整,其圖像的多普勒中心頻率還可視為零,不受影響。
基于此,本文提出一種兼顧編隊多普勒中心頻率的波束同步方案:主星采用二維導引,從星在二維導引后再進行滾動姿態(tài)調整,使兩星對地觀測區(qū)域在SAR天線距離向投影上重合,如圖4所示In-SAR編隊雙星對地觀測的重疊區(qū)域才構成有效的觀測范圍,其中圖4(b)的重疊區(qū)域大于圖4(a),且在對地觀測期間,觀測區(qū)域的移動方向與投影橢圓的長軸方向近乎垂直,因此在一段時間的連續(xù)觀測中,重疊區(qū)域的長軸越長,則有效觀測范圍越大。因此,圖4(b)的有效觀測范圍要大于圖4(a),僅略小于圖4(c)。
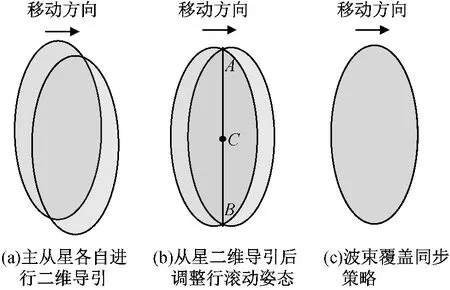
圖4 對地觀測區(qū)域Fig.4 Observation area to the earth
新方案中,因無法實現兩星觀測區(qū)域的完全重合,從星將不能完全接收經地面反射的主星電磁波,從星的成像范圍只是兩星對地觀測的重疊區(qū)域。此時,從星的多普勒中心頻率應為圖4(b)AB中點C處對應回波多普勒。鑒于主從兩星的多普勒中心頻率點不再為同一點,故將式(13)表示的從星多普勒中心頻率修改為

綜上所述,新的波束同步方案為主星二維導引、從星二維導引后再滾動姿態(tài)調整。新方案中主從星圖像的多普勒中心頻率均為零,實現了全零多普勒導引,可避免圖像干涉處理時的多普勒質心去相干,同時兼顧InSAR編隊的對地觀測范圍。
3 新方案從星姿態(tài)策略
新方案中從星姿態(tài)策略的關鍵是求出從星二維導引后滾動姿態(tài)調整的角度。InSAR編隊觀測如圖5所示。圖中:為地心;S1,S2分別為主星和從星;A,B分別為主從星二維導引后SAR天線中心在地面的投影點;C為從星進行滾動調整后SAR天線中心的地面投影點。需求出的就是S2B,S2C間的夾角φ。
圖5 InSAR編隊觀測2Fig.5 Observation 2of InSAR formation
由上可知,向量OS1,OS2,OA,OB在慣性系中的表示均可求。當編隊為緊密構型,即兩星相距較近時,可將對地觀測區(qū)域的地面視為平面。為保證姿態(tài)規(guī)劃后兩星對地觀測區(qū)域在SAR天線距離向投影完全重合,待求的點C應滿足關系使AC⊥平面OBC。由此,可從幾何關系求出向量AC,從而求出向量OC。至此S2,S2C均可在慣性系中表示。則有

由此完成了從星的姿態(tài)規(guī)劃策略。
4 數學仿真
主從星初始軌道根數見表1。SAR天線安裝下視角為左側視35°,距離和方位向天線寬度分別為10,3.5m。偏航和俯仰二維導引律為
式中:u為緯度幅角;ωs,ωe分別為衛(wèi)星軌道和地球自轉角速度[5]。
表1 編隊軌道參數Tab.1 Orbit parameters of InSAR formation
兩星均采用二維導引(方案1)、波束覆蓋同步(方案2)、兩星二維導引后從星再調整滾動姿態(tài)(方案3)的3種姿態(tài)策略對應的不同緯度地區(qū)的地面觀測區(qū)域如圖6~8所示。
由仿真結果可知:波束覆蓋同步姿態(tài)策略(方案2)較好地實現了主從星觀測區(qū)域波束重疊的效果;與只對雙星進行二維導引的方案(方案1)相比,綜合考慮全零多普勒與波束同步的方案(方案3)也進一步提高了波束覆蓋的范圍。就仿真的軌道構型而言,在低緯度地區(qū)的效果尤為明顯。
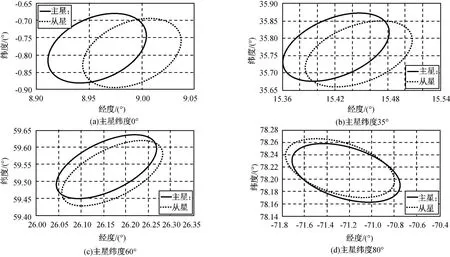
圖6 方案1Fig.6 Results of method 1
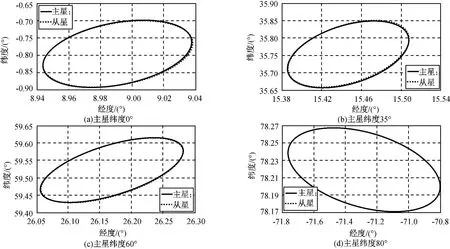
圖7 方案2Fig.7 Results of method 2
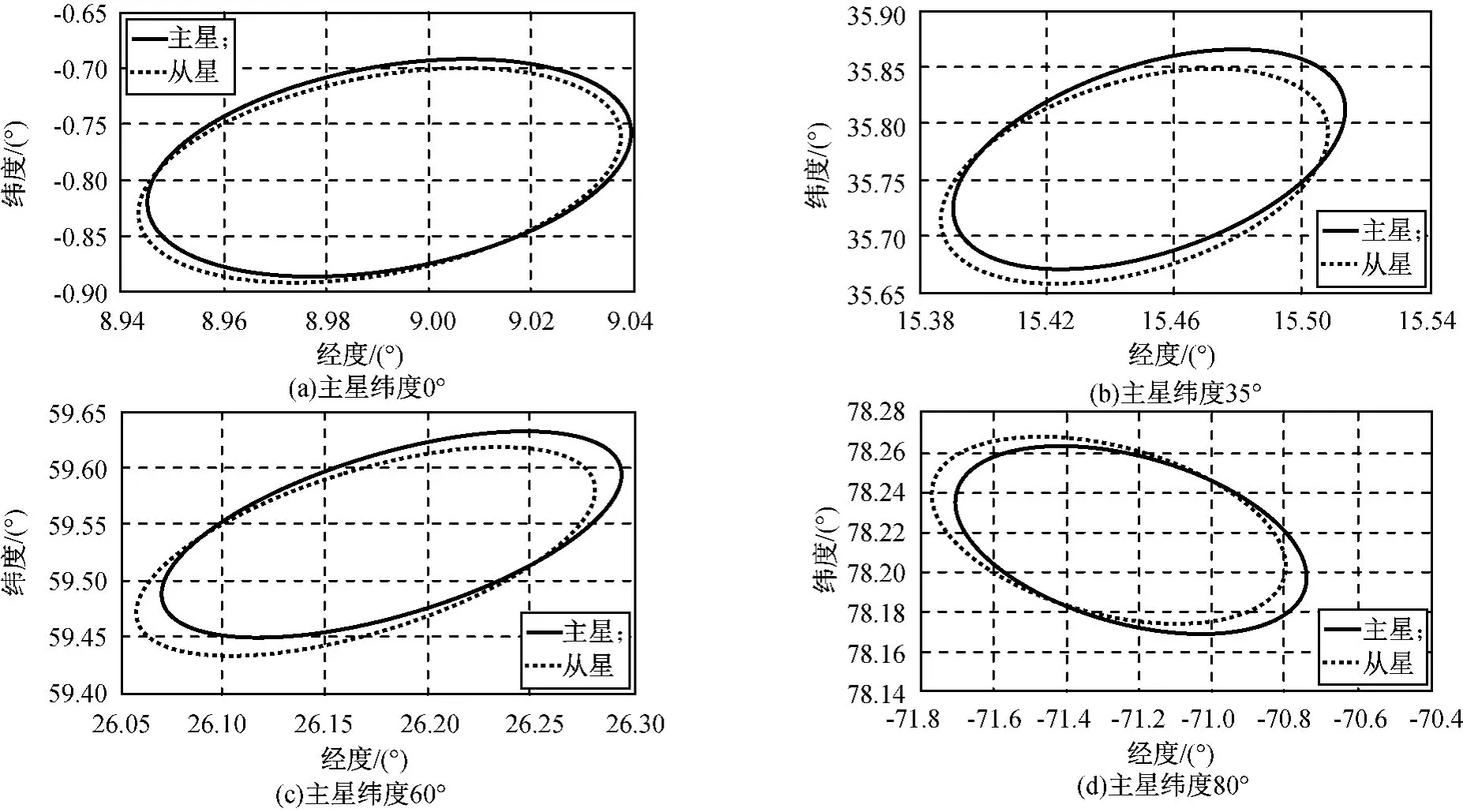
圖8 方案3Fig.8 Results of method 3
5 結束語
本文提出了一種考慮主星二維導引的InSAR編隊衛(wèi)星波束覆蓋同步策略,可實現約100%的波束重疊覆蓋。分析了該策略下主從兩顆衛(wèi)星圖像的多普勒中心頻率以及對后期圖像干涉處理的影響,提出了一種綜合考慮全零多普勒和波束同步的姿態(tài)規(guī)劃策略,在保證雙星多普勒中心頻率均為零的情況下可使編隊對地觀測有效區(qū)域最大。
[1] MASSONNET D.Capabilities and limitation of the interferometric cartwheel[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(3):506-520.
[2] ERRICO M D.Attitude and antenna pointing design of bistatic radar formations[J].IEEE Transactions on Aerospace and Electronic Systems,2003,39(3):949-960.
[3] 黃海風,梁甸農.非合作式星載雙站雷達波束同步設計[J].宇航學報,2005,26(5):606-611.
[4] 賀東雷,曹喜濱.星載InSAR編隊波束同步策略[J].宇航學報,2009,30(5):2031-2036.
[5] FIEDLER H,BOERNER E,MITTERMAYER J,et al.Total zeros Doppler steering-a new method for minimizing the Doppler centroid[J].IEEE Geosci Remote Sens Lett,2005,2(2):141-145.
[6] 張永俊,黃海風,張永勝,等.最大相干波束同步方法及其性能驗證研究[J].電子學報,2012,40(8):1564-1571.