電網擾動狀態下的機電轉子穩定控制方法研究
2015-12-30 09:19:50彭秋紅周昕
電網與清潔能源 2015年8期
關鍵詞:發電機
彭秋紅,周昕
(1.平頂山工業職業技術學院 自動化與信息工程學院,河南 平頂山 467000;2.平頂山工業職業技術學院網絡教育學院,河南 平頂山 467000)
電網擾動狀態下的機電轉子穩定控制方法研究
彭秋紅1,周昕2
(1.平頂山工業職業技術學院 自動化與信息工程學院,河南 平頂山 467000;2.平頂山工業職業技術學院網絡教育學院,河南 平頂山 467000)
在對電網擾動狀態下的機電轉子穩定控制方法的研究過程中,采用當前的方法進行機電轉子穩定控制時,轉子角行波傳輸不穩定,控制性能較差。提出基于改進TORA轉子位置反饋的機電轉子穩定控制方法。該方法依據電網在擾動狀態下的特有框架結構,融合FLOYD算法,計算并得到機電設備頻率特征函數的變化規律,在此基礎上對電網系統穩態時和電網擾動狀態下,機電波到達后機電頻率的特征進行有效的區分,完成了電網擾動狀態下的機電轉子穩定控制。實驗證明,該方法控制精確度高,穩定性強。
高通濾波器;控制器;FLOYD算法
在電力行業不斷發展的同時,電網規模也在快速擴大[1-3]。但隨之而來的電網擾動問題也給電力行業帶來了嚴重的危害。而電網擾動狀態下的穩定控制方法則是解決這一問題的關鍵,引起了很多專家與學者的重視[4-6]。其中,電網擾動狀態下的機電轉子穩定控制在一些領域得到了較好的應用,也成為了業內人士研究的焦點課題,受到了廣泛的關注,同時也出現了很多好的方法[7]。
文獻[8]提出了將動力學轉換為反饋形式的非線性級聯來實現對電網擾動狀態下的機電轉子穩定控制。該方法較為簡單,但是存在局限性大的問題。文獻[9]重點研究了通過自調節模糊滑模控制實現電網擾動狀態下的機電轉子穩定控制。該方法耗時短,但是進行機電轉子穩定控制時,轉子角增量行波傳輸不穩定,存在控制性能不穩定的問題。文獻[10]依據徑向懸浮力與偏心位移的相互關聯性,使機電對轉子偏心位移進行直接控制,完成了電網擾動狀態下的機電轉子穩定控制。該方法適應性較強,但是計算較為繁瑣,存在耗時較長的問題。
針對上述問題的產生,提出了一種基于改進TORA轉子位置反饋算法,在電網擾動狀態下,應用到了機電轉子穩定控制中。
1 擾動狀態下的機電轉子穩定控制問題分析
一般情況下,電網擾動包含短路與切機/切負荷2種類型。當相關設備的定子連接到電網時,機電轉子會由電壓型交-直-交PWM變流器配備三相轉差頻率電流進行勵磁。電網擾動狀態下的機電轉子穩定控制過程中,需要高頻率的調節機電轉子勵磁電流的幅值、頻率和相位,使得電網在擾動狀態下發電機可以在同步速上、下大范圍內做變速恒頻運行,完成對有功、無功的解耦控制。具體的步驟如下詳述。
在對電網擾動狀態下的機電轉子穩定控制中,B代表電機氣隙磁密,順著x與y軸位置上分量,可以用式(1)表述為:

在上式中,由l代表電機定子鐵心長度,可以表述為由r代表的外徑。
在對電網擾動狀態下的機電轉子穩定控制中,當轉子出現偏移時,其矢量可以表述為:

在上式中,由x、y表述為電渦流位移傳感器,且各測得的轉子沿x、y方向的偏心位移。
在對電網擾動狀態下的機電轉子穩定控制中,機電轉子偏心位移的方向即偏心位移角度能夠表述為:

依據上式可以得出,對機電轉子的發電機有功、無功的解耦控制方程,可以用下式表述為:
2 控制過程的優化
在對電網擾動狀態下的機電轉子穩定控制過程中,依據電網在擾動狀態下的框架結構,引入FLOYD算法,計算并得到發電機頻率特征函數的變化規律,在此基礎上對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效的區分。
2.1 電網擾動狀態下的發電機頻率規律分析
在電網正常運行的狀態下,機電設備頻率較為穩定,只是會因為負荷而形成頻率在50 Hz范圍內波動,周期較短。在電網擾動狀態下,當機電信號到達后,因為受到長時間不平穩功率的影響,會形成加速或者減速情況,會促使頻率在一定時間內出現單調上升和下滑的情況,且周期性較強。在電網穩態時,機電波出現較短周期的波動性,與在電網擾動狀態下,當機電到達后周期性較強的單調性區別較為明顯。
在對電網擾動狀態下的機電轉子穩定控制過程中,引入FLOYD算法。由CF(i)代表的時間序列,也可以表述為特征函數。用下式計算:

在上式中,由f(i)代表在第i時刻發電機的頻率。
在對電網擾動狀態下的機電轉子穩定控制過程中,依據式(5)可以說明,由CF可以明顯的區分電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征。由W1和W2分別代表發電機頻率特征函數范圍,利用下式分別定義由L1和L2代表的發電機頻率特征函數范圍:
在對機電轉子穩定控制過程中,定義由R(κ)代表的第κ點的判別函數,用下式表述為:

當電網的系統處于穩定的狀態時,由CF代表的特征函數會形成較短的波動性,因為正負相抵消會促使每個時刻L1的數值較短,而L2的數值也會出現較小的正數,同時也說明了如果電網在穩定的狀態下,會在零值范圍內迭代。反之,在電網擾動的狀態下的數值單調增大或者減小。
依據上述結論可以得到,在電網擾動狀態下,機電波到達時刻判斷規律如下:
綜上所述可以說明,在對電網擾動狀態下的機電轉子穩定控制中,依據電網在擾動狀態下的框架結構,融合于FLOYD算法,計算并得到發電機頻率特征函數的變化規律,在此基礎上對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效區分的過程,為實現電網擾動狀態下的機電轉子穩定優化控制奠定了有利的基礎。
2.2 機電轉子穩定控制過程
在對電網擾動狀態下的機電轉子穩定優化控制過程中,計算并得到發電機頻率特征函數的變化規律后,對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效的區分,并構建一個含有電網系統能力性能控制的李亞普諾夫函數,融合于李亞普諾夫穩定性定理優化設計機電轉子狀態變量的控制器與高通濾波器,有效完成電網擾動狀態下的機電轉子穩定控制。具體的步驟如下。
在對電網擾動狀態下的機電轉子穩定控制過程中,構造的含有電網系統能力性能控制的李亞普諾夫函數用下式表述為:

在上式中,由κE、κθ分別代表電網系統的正常數,因為電網系統能量從始至終為非負,所以由v代表的李亞普諾夫函是正定的。利用下式對v進行計算,可以表述為:

在對電網擾動狀態下的機電轉子穩定優化控制過程中,融合于李亞普諾夫穩定性判定,設計出機電轉子狀態變量的控制器,用下式表述為:

在對電網擾動狀態下的機電轉子穩定優化控制過程中,依據上式可以求得機電轉子閉環控制系統的穩定性。
在對電網擾動狀態下的機電轉子穩定優化控制過程中,利用高通濾波器估計電網擾動狀態下中的速度反饋變量。將控制李亞普諾夫函數重新設計為

在上式中,由η代表動態濾波器的輸出,由α,κη代表正常數。
在對電網擾動狀態下的機電轉子穩定優化控制過程中,需要設計一個濾波器促使其能夠輸出一個動態的偽角速度取代真實的機電轉子的角速度反饋,因此設計的動態濾波器可以采用下式表述為:

在對電網擾動狀態下的機電轉子穩定優化控制過程中,利用下式對新的控制李亞普諾夫函數進行計算可以得出:

在對電網擾動狀態下的機電轉子穩定優化控制過程中,要想保證上式得出的由代表的李亞普諾夫函數非負,其控制輸入可利 用下式可選為:

在對電網擾動狀態下的機電轉子穩定優化控制過程中,依據上述結論構建的閉環控制系統在李亞普諾夫意義上是穩定的。
3 實驗仿真證明
為了證明電網擾動狀態下的機電轉子穩定控制方法的有效性,需要進行一次實驗。
實驗在psim6.0平臺上搭建電網擾動狀態下的機電轉子穩定控制實驗平臺。利用psim調用C++編譯的動態鏈接庫實現電網擾動狀態下的機電轉子穩定控制實驗。實驗需要在2 000 r/min滿功率時進行,在實際操作的實驗中需要收集1 760 r/min滿功率時的相應波形。
實驗①
在升壓變壓器高壓側A相串聯+10%(2.02 kV)的電壓源,通過Dyll變壓器后機組進線電壓的幅值與相位都存在一定的擾動性,分別采用傳統算法與改進算法進行機電轉子穩定控制實驗,不同算法的波形對比見圖1。

圖1 不同算法的機電轉子穩定控制對比Fig.1 Different algorithms of mechanical and electrical rotor stability control
從圖1中可以看出改進算法進行機電轉子穩定控制的穩定性要優于傳統算法,這是由于改進算法先依據電網在擾動狀態下的框架結構,融合于FLOYD算法,計算并得到發電機頻率特征函數的變化規律,在此基礎上對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效的區分,因此有效地保障了對機電轉子穩定控制的穩定性。
實驗②
分別采用傳統算法與改進算法進行電網擾動下的機電轉子穩定控制實驗。將不同算法的控制結果進行對比,用來衡量2種算法的控制效果,對比結果見表1。
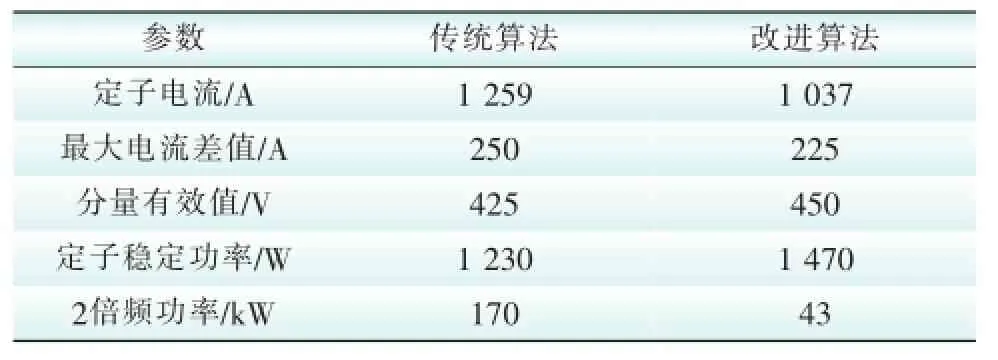
表1 不同算法機電轉子控制結果對比Tab.1 The results of different algorithms of mechanical and electrical rotor control
表1可以說明改進算法進行電網擾動下的機電轉子穩定控制的精確度要優于傳統算法,這是因為使用改進算法計算并得到發電機頻率特征函數的變化規律后,對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效的區分,并構建了一個含有電網系統能力性能控制的李亞普諾夫函數,融合于李亞普諾夫穩定性定理優化設計出機電轉子狀態變量的控制器與高通濾波器,保障了算法控制的精確度。
上述實驗可以證明基于改進TORA轉子位置反饋算法的電網擾動狀態下的機電轉子穩定方法精確度高,穩定性強。
4 結語
針對采用當前的算法進行機電轉子穩定控制時,轉子角行波傳輸不穩定,造成控制性能差的問題,提出了一種基于改進TORA轉子位置反饋算法的電網擾動狀態下的機電轉子穩定控制方法。該方法依據電網在擾動狀態下的框架結構,融合于FLOYD算法,計算并得到發電機頻率特征函數的變化規律,在此基礎上對電網系統穩態時和電網擾動狀態下機電波到達后發電機頻率的特征進行有效的區分,并構建了一個含有電網系統能力性能控制的李亞普諾夫函數,融合于李亞普諾夫穩定性定理優化設計出機電轉子狀態變量的控制器與高通濾波器,有效的完成了電網擾動狀態下的機電轉子穩定控制。實驗仿真證明,基于電網擾動狀態下的機電轉子穩定控制方法控制精確度高,穩定性強。
[1]邵慶華,邵昱,趙波,等.風速擾動情況下的風電并網電壓穩定性研究[J].陜西電力,2013,41(3):15-17. SHAO Qinghua,SHAO Yu,ZHAO Bo,et al.The wind speed disturbance of wind power grid voltage stability study[J].Journal of Shaanxi electric Power,2013,41(3):15-17(in Chinese).
[2]陳恩澤,劉滌塵,廖清芬,等.多重擾動下的跨區電網低頻振蕩研究[J].電工技術學報,2014(2):290-296. CHEN Enze,LIU dichen,LIAO Qingfen,et al.Multiple inter-district grid disturbance under the 1ow frequency oscillation research[J].Journal of electrotechnics,2014(2):290-296(in Chinese)
[3]薛家祥,鐘良文,張思章,等.光伏系統中擾動觀察法的控制方法研究[J].電氣傳動,2013,43(3):40-44. XUE Jiaxiang,ZHONG Liangwen,ZHANG Sizhang,et al. In the photovoltaic system control method of perturbation of observation study[J].electric Drive,2013,43(3):40-44(in Chinese).
[4]王長青,張馬林,王偉,等.隨機擾動情況下繩系衛星狀態保持階段的最優控制[J].空間科學學報,2014,34(6):881-886. WANG Changqing,ZHANG Malin,WANG wei,et al. The randomized cases tethered satellite state maintenance phase of the optimal control[J].Journal of Space Science,2014,34(6):881-886(in Chinese).
[5]李江,李國慶,鄒維,等.固定增益與變增益最優勵磁控制策略的小擾動穩定域研究[J].電力自動化設備,2014,34(2):97-100. LI Jiang,LI Guoqing,ZOU Wei,et al.The fixed gain with variable gain the optimal excitation control strategy of small disturbance stability domain research[J].electric Power Automation Equipment,2014,34(2):97-100.
[6]燕躍豪,畢天姝,楊奇遜.一種基于機電波理論的電網擾動在線定位方法[J].華北電力大學學報:自然科學版,2014,41(1):1-6.
YAN Yuehao,BI Tianshu,YANG Qixun.A grid disturbance of online positioning method based on the theory of the electromechanical wave[J].Journal of North China electric Power University:Natural Science Edition,2014,41(1):1-6(in Chinese).
[7]胡柳,宋平崗.不對稱故障下主輔電流控制對雙饋電機轉子側變換器的研究[J].科技創新與應用,2013,(8):13-14. HU Liu,SONG pinggang.Advocate complementary under asymmetric fault current control of doubly-fed motor rotor side converter study[J].Science and Technology Innovation and Application,2013(8):13-14(in Chinese).
[8]唐欣,李建霖,滕本科.提高擾動下VSC-HVDC供電電壓質量的逆變站控制方法[J].電工技術學報,2013,28(9):112-119. TANG Xin,LI Jianlin,TENG Benke.Improve the quality of disturbance of VSC-HVDC power supply voltage of inverter station control method[J].Journal of electrotechnics,2013,28(9):112-119(in Chinese).
[9]劉巨,孫海順,文勁宇,等.交流互聯電網中大擾動對聯絡線的沖擊特性分析方法[J].電力系統自動化,2013,37(21):17-22. LIU Ju,SUN Haishun,WEN Jinyu,et al.Ac interconnected power grid cuhk disturbance impact characteristics of 1ink analysis method[J].Automation of electric Power Systems,2013,37(21):17-22(in Chinese).
[10]付永新,張永明,張仁杰.電網模擬裝置諧波控制器仿真研究[J].計算機仿真,2014,31(7):140-143. FU Yongxin,ZHANG Yongming,ZHANG Renjie.Power grid harmonic controller simulator simulation[J].Computer Simulation,2014,31(7):140-143.
(編輯 徐花榮)
Research on Mechanical and Electrical Rotor Stability Control Method under Grid Disturbances
PENG Qiuhong1,ZHOU Xin2
(1.Department of Automation and Information Engineering,Pingdingshan Industrial College of Technology,Pingdingshan 467000,Henan,China;2.School of Network Education,Pingdingshan Industrial College of Technology,Pingdingshan 467000,Henan,China)
In the process of studying the mechanical and electrical rotor stability under the power grid disturbance,if the current method is used for the mechanical and electrical rotor stability,the rotor angle traveling wave transmission is not stable and the control performance is poor.This paper proposes a new method for the mechanical and electrical rotor stability control based on the improved TORA rotor position feedback. This method,based on the unique frame structure of the power gird under disturbances and fusion of the FLOYD algorithm,calculates and obtains the change 1aw of the mechanical and electrical equipment frequency characteristic function.On the basis,effective distinguishing of the electrical and mechanical frequency characteristic upon arrival of the mechanical and electrical wave under both steady power grid conditions and grid disturbances is realized, and also the electrical and mechanical stability control under power grid disturbances is completed.Experiments show that the method is of high control precision and strong stability.
2014-04-08。
彭秋紅(1966),女,工程碩士,副教授,主要研究方向為礦山機電技術;
周 昕(1973),男,工程碩士,講師,主要研究領域為計算機網絡技術。
1674-3814(2015)08-0055-04
TM131
A
KEY W0RDS:high-pass filter;the controller;FLOYD algorithm
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45