基于單位四元數的單獨像對相對定向
2015-12-29 05:47:22柳建鋒,盛慶紅,王惠南
測繪工程 2015年6期
基于單位四元數的單獨像對相對定向
柳建鋒,盛慶紅,王惠南
(南京航空航天大學航天學院,江蘇南京210016)
摘要:目前對單位四元數描述空間旋轉的應用,基本上是將其轉換成旋轉矩陣的形式,而忽略了單位四元數描述空間向量旋轉具有描述幾何關系的直觀性以及運算簡潔的優勢。基于此提出一種基于單位四元數的單獨像對相對定向法,方法首先采用向量描述同名光線,然后利用單位四元數描述立體像對中左右影像同名光線的變換關系,建立單位四元數共面條件方程模型,再按照帶有約束條件的間接平差原理進行最小二乘平差,確定相對定向元素。針對RC30航空影像和低空無人機影像采用單位四元數法分別進行單獨像對相對定向實驗,結果表明單位四元數相對定向方法計算精度較高,為解決攝影測量中坐標變換問題提供更多選擇。
關鍵詞:單獨像對相對定向;單位四元數;共面條件方程;歐拉角
中圖分類號:P23
收稿日期:2014-10-30
基金項目:國家自然科學基金資助項目(41471381;41101441);南京航空航天大學研究生創新基地開放基金項目(kfjj130133)
作者簡介:柳建鋒(1990-),男,碩士研究生.
Independent relative orientation based on unit quaternion
LIU Jian-feng,SHENG Qing-hong,WANG Hui-nan
(College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Abstract:The main method of describing spatial rotation with unit quaternion is rotation matrix,without considering property of unit quaternion.Unit quaternion can intuitively and succinctly describe rotation of vectors.Based on this,an innovative method in the independent relative orientation based on unit quaternion is proposed.The algorithm describes corresponding image rays as vectors,then uses unit quaternion to describe the rotational relationship of corresponding image rays.Coplanarity condition equation is linearized by the eight elements of two unit quaternion and elements of relative orientation and calculated using an iterative method according to indirect adjustment with constraints.The relative orientation of RC30 aerial images and UAV images are realized with method unit quaternion and method Euler angles.The results show that the relative orientation accuracy of the method unit quaternion is better than method Euler angle.It provides more options to solve the problems of coordinate transformation in photogrammetry.
Key words:independent relative orientation;unit quaternion;coplanarity condition equation;Euler angles
立體像對的相對定向是攝影測量學的基礎,相對定向在三維重建技術、數字影像三維可視化研究以及高精度定位等方面發揮著重要作用[1]。如何有效精準地描述左右影像像空間輔助坐標系之間的關系是相對定向中的關鍵問題。基于多種同名特征的相對定向法[2]和基于廣義點的相對定向[3],從獲取高精度匹配點的角度出發,提高定向精度。附有四個獨立約束條件的相對定向法[4],將約束條件加入到解決過度參數化的求解中,計算結果更加穩定可靠。利用IMU/GPS信息作為外方位元素先驗值加入到相對定向的平差中[5],有效降低匹配誤差對于定向結果的影響,提高定向元素解算的精準度。以上相對定向方法在描述坐標系轉換關系時主要利用歐拉角法,求解過程中存在著復雜的三角運算,運算量大而且求解時可能會導致溢出。單位四元數可以方便的構建旋轉矩陣,而且可以實現姿態描述的唯一性,已廣泛應用于導航[6]和飛行器姿態確定等領域[7]。在攝影測量學中單位四元數也已經成功應用于構建共線條件方程[8]、線陣CCD影像的外方位元素解算[9]以及空間后方交會[10]、三維空間相似變換解算[11]、連續像對相對定向[12]中。
但上述單位四元數的應用只是將旋轉矩陣用單位四元數的元素來表示,與歐拉角唯一區別僅僅在于參數的選擇不同,并沒有體現出單位四元數描述空間向量旋轉的幾何關系的直觀性以及其運算簡潔的優勢[13]。本文利用四元數對向量進行代數表示,利用單位四元數描述向量的空間旋轉,建立基于單位四元數的共面條件方程模型,解算相對定向元素。
1單位四元數共面條件方程
1.1單位四元數空間旋轉



圖1 單位四元數空間旋轉示意圖
(1)式中:n=(l,m,n)表示旋轉軸的單位向量;θ表示繞定軸旋轉的角度。將空間中的某一點看成是原點指向該點的向量,記為P(x,y,z)T,旋轉后得到的點記為P′ (x′,y′,z′)T,那么單位四元數表示的空間旋轉過程如圖1所示,用數學公式描述為
(2)其中,首先要將三維向量表示成第一個量為零的四元數的形式,然后按照四元數的乘法進行運算。為了方便計算,將P′,P,q表示成矩陣形式


(3)四元數乘法運算法則為pq=[p1q1-p2q2-p3q3-p4q4,
p1q2+p2q1+p3q4-p4q3,
p1q3-p2q4+p3q1+p4q2,
p1q4+p2q3-p3q2+p4q1].
(4)
1.2單位四元數共面條件
圖2表示一個立體像對實現單位四元數單獨像對相對定向的過程,S1-x1y1z1和S2-x2y2z2分別為立體像對左右影像的像空間坐標,S1-X1Y1Z1和S2-X2Y2Z2分別為左右影像的像空間輔助坐標系,S1m1,S2m2表示一對同名光線,單獨像對相對定向的過程即為將所有的同名光線分別繞各自的投影中心旋轉,使得它們與空間基線S1S2共面。假設同名像點m1和m2的像平面坐標分別為 (xl,yl)和(xr,yr),焦距為f,ql和qr為單位四元數,用于分別描述左右影像同名光線向量的坐標變換[14],記為
(5)那么根據式(2)可以得到m1和m2的像空間輔助坐標,即同名光線S1m1與S2m2的向量為
(6)由于四元數乘法不滿足乘法交換律,所以式中參數均按照式(4)的乘法公式從左至右運算。根據式(6),共面條件方程為
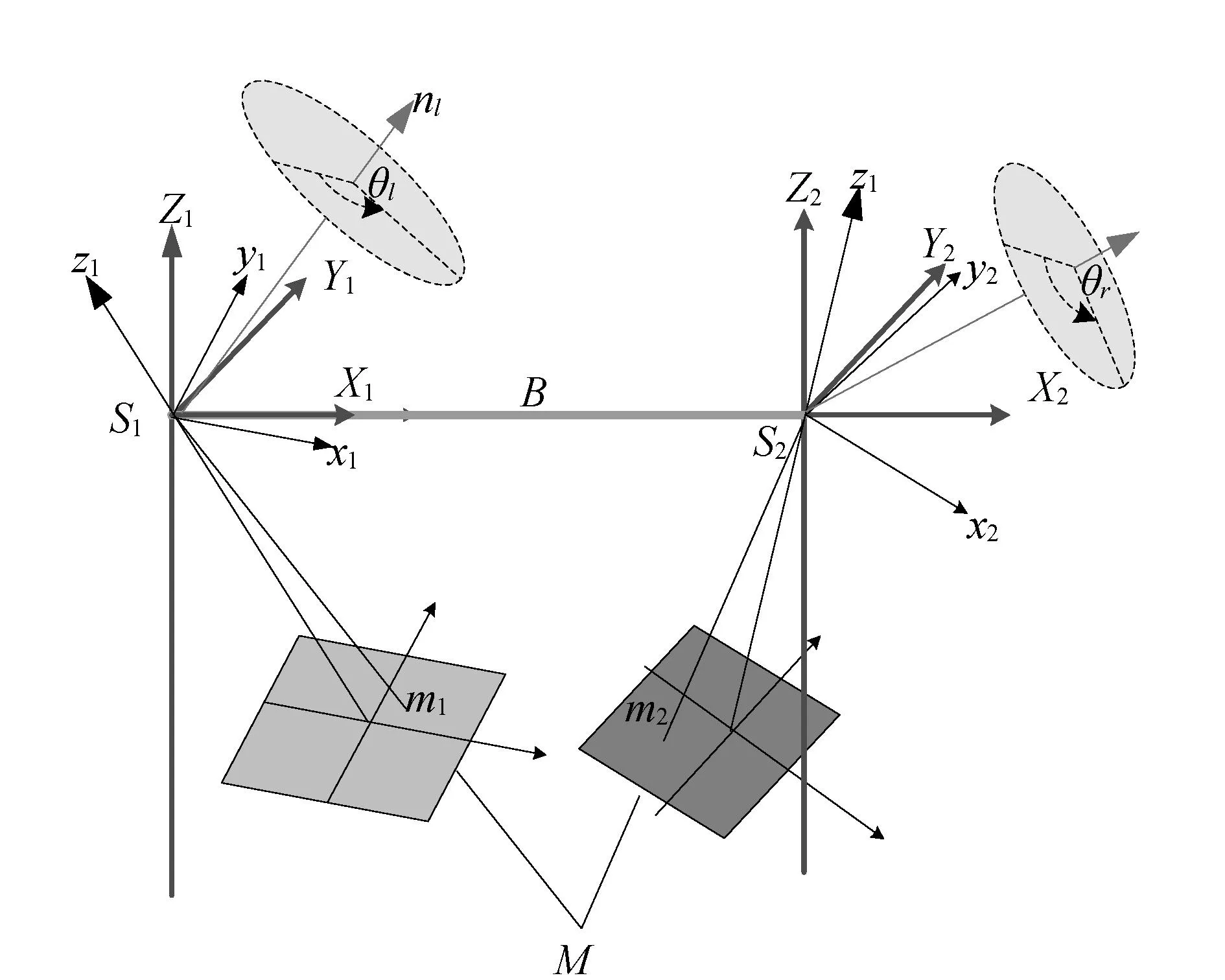
圖2 單位四元數共面條件方程模型
(7)目前,對單位四元數的應用主要為將單位四元數轉換為旋轉矩陣,具體形式如下:
(8)
將式(6)與式(8)比較,可以看出單位四元數與向量的直接運算代替旋轉矩陣,在形式上更加簡潔,運算更為方便。結合圖2可以看出,利用單位四元數代替旋轉矩陣,引入的旋轉軸和旋轉角,可以將光線向量的空間旋轉的幾何直觀性體現出來。
2平差模型及其解算
2.1線性化模型
利用式(4)與式(6),將式(7)展開,并將等式兩邊對B歸一化處理,然后進行線性化,得到誤差方程式為
v=a1dql0+a2dql1+a3dql2+a4dql3+a5dqr0+
(9)
式中,dql0,dql1,dql2,dql3,dqr0,dqr1,dqr2,dqr3為未知數的改正數,其中
F0=YlZr-YrZl.
2.2單獨像對相對定向平差計算
將誤差方程式V寫成矩陣形式為
V=AX+F0.
(10)
其中,
X=
ql和qr是單位四元數,V存在兩個約束條件:
(11)
由于單獨像對相對定向左影像的ω1=0,則V還存在一個約束條件:
(12)
對式(11)和式(12)進行線性化,可得到約束條件方程
(13)
式中:
令
式(13)矩陣形式為

(14)
設觀測n對同名點,則對每對同名點按照式(10)可列一個誤差方程,則整體平差的誤差方程式為
(15)
式中:V和F0是n×1維矩陣,A是n×8維矩陣。采用聯系數的直接法[16],得
(16)
式中
當選取的同名點數量n≥5時,給定ql和qr的初始值,然后解算相對定向元素的改正數,再根據式(16)逐步迭代,直到改正數小于規定的限差終止。
2.3精度評定
單獨像對相對定向的相對定向元素φ1,κ1,φ2,ω2,κ2是各未知數的非線性函數。根據協方差傳播律[17],可以計算相對定向元素的精度。記φ1,κ1,φ2,ω2,κ2的協方差陣為DXX,有
(17)
式中,N11=(ATA)-1為8×8的方陣,其主對角線上的元素分別對應著各未知數的權倒數,
式中,
3實驗結果與分析
由于相對定向主要用于航空攝影測量,為了驗證基于單位四元數的單獨像對相對定向算法的正確性、有效性和適用性,本文采用RC30航空影像與低空無人機影像分別進行實驗驗證。單位四元數的初值設置如下:ql0=qr0=1,ql1=ql2=ql3=qr1=qr2=qr3=0。
RC30航空影像,其航向重疊度為60%,影像的像元大小為0.045mm,內方位元素x0=-0.004mm、y0=-0.008mm、f=152.72mm,影像分辨率5 120×5 120,航高2 290m。實驗中,人工選取21對同名點,其分布如圖3所示。

圖3 RC30航空影像和特征點
無人機數據為某地區無人機影像,其航向重疊度70%,影像的像素大小為0.006 4mm,影像內方位元素x0=-0.05mm、y0=-0.087mm、f=48.1mm,影像分辨率7 264×5 440,航高700m。實驗選取20對同名像點,分布情況如圖4所示。

圖4 無人機影像和特征點
利用本文方法進行實驗,定向結果如表1所示,定向精度如表2所示。

表1 相對定向結果
從表1可以看出,本文采用的單位四元數法能夠實現RC30航空影像與低空無人機影像的相對定向,而據相對定向結果可以看出,RC30航空影像相對定向元素值較小,這是由于其平臺穩定導致相鄰影像相對姿態相差不大;而無人機影像相對定向元素相對偏大,這是由于其平臺受外界影響較大,導致相鄰影像間相對姿態差別較大。
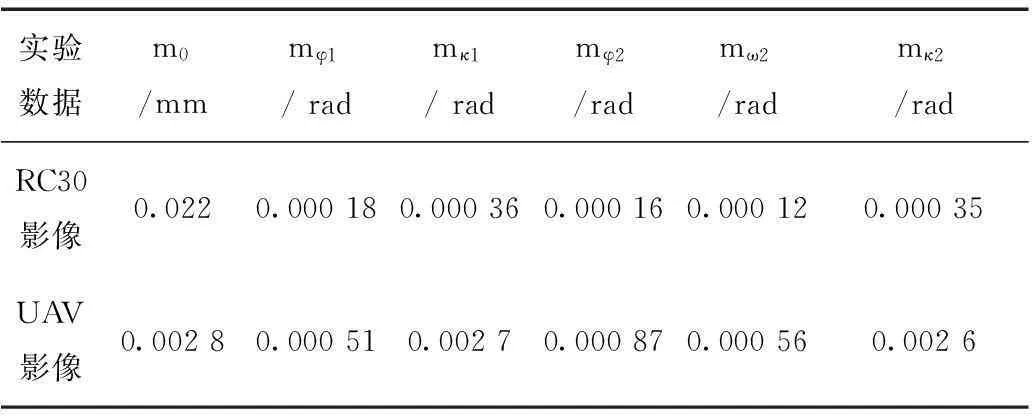
表2 相對定向精度
從表2可以看出,RC30航空影像單獨像對相對定向單位權中誤差約為0.022 mm(0.5個像素)左右,各未知數中誤差也完全合理,驗證算法的正確性。無人機影像中誤差0.008 3 mm(1.3個像素),中誤差相對偏大,這是由于無人機平臺的不穩定導致無人機影像存在一定的形變導致,各相對定向元素精度也在比較合理范圍之內。
4結論
單位四元數描述的旋轉過程,大多停留在將其轉換為旋轉矩陣的形式,而忽略單位四元數與向量直接運算在幾何意義上的直觀與形式上的簡潔。本文利用單位四元數與向量直接運算的特點,摒棄旋轉矩陣,采用單位四元數與向量的直接運算建立單位四元數單獨像對相對定向模型,首先用向量描述同名光線,并將向量擴展為四元數的形式,然后采用單位四元數來描述同名光線的旋轉關系,根據同名光線相交原理建立共面方程,求解相對定向元素。結果表明文中采用的方法形式簡潔,同時還驗證了文中相對定向方法對多種航空影像的可靠性,為今后越來越多的輕小平臺影像的相對定向提出一種新思路,為攝影測量中涉及到坐標變換的問題提供更多的選擇性。如何發掘單位四元數法在攝影測量以及其他更多領域中的潛能和更多的優勢將成為接下來要研究的內容。
參考文獻:
[1]張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2009.
[2]ZHANG Y,HU B,ZHANG J.Relative orientation based on multi-features [J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(5):700-707.
[3]何喬,趙泳,張保明,等.基于廣義點的相對定向和絕對定向[J].海洋測繪,2006,26(4):24-26.
[4]ZHANG Y,HUANG X,HU X,et al.Direct relative orientation with four independent constraints [J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(6): 809-817.
[5]趙祖軍,柳欽火,劉強,等.利用IMU/GPS信息作為約束進行相對定向[J].應用技術,2006(6):31-35.
[6]CHANG L,HU B,CHEN S,et al.Comments on Quaternion-Based Method for SINS/SAR Integrated Navigation System [J].Aerospace and Electronic Systems,IEEE Transactions on,2013,49(2): 1400-1402.
[7]WU S,WU G,TAN S,et al.Quaternion-based adaptive terminal sliding mode control for spacecraft attitude tracking[C].Control and Automation (ICCA),2013 10th IEEE International Conference on,Hangzhou,2013.劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2009.
[2]ZHANG Y,HU B,ZHANG J.Relative orientation based on multi-features [J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(5):700-707.
[3]何喬,趙泳,張保明,等.基于廣義點的相對定向和絕對定向[J].海洋測繪,2006,26(4):24-26.
[4]ZHANG Y,HUANG X,HU X,et al.Direct relative orientation with four independent constraints [J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(6): 809-817.
[5]趙祖軍,柳欽火,劉強,等.利用IMU/GPS信息作為約束進行相對定向[J].應用技術,2006(6):31-35.
[6]CHANG L,HU B,CHEN S,et al.Comments on Quaternion-Based Method for SINS/SAR Integrated Navigation System [J].Aerospace and Electronic Systems,IEEE Transactions on,2013,49(2): 1400-1402.
[7]WU S,WU G,TAN S,et al.Quaternion-based adaptive terminal sliding mode control for spacecraft attitude tracking[C].Control and Automation (ICCA),2013 10th IEEE International Conference on,Hangzhou,2013.
[8]楊化超,盧曉攀,王永波,等.攝影測量共線方程的單位四元數描述[J].中國圖像圖形學報,2012,17(3):301-308.
[9]JIANGG,JIANGT,GONGH,etal.ExteriorOrientationofLine-ArrayCCDImagesBasedonQuaternionSphericalLinearInterpolation[C].ISPRSTCVIISymposium-100YearsISPRS,Vienna,2010.
[10]閆利,聶倩,趙展.利用四元數描述線陣CCD影像的空間后方交會[J].武漢大學學報:信息科學版, 2010,35(2): 201-204.
[11]趙雙明,郭秋燕,羅研,等.基于四元數的三維空間相似變換解算[J].武漢大學學報:信息科學版, 2009,34(10):1214-1217.
[12]周永軍,鄧才華.利用HGA和單位四元數的相對定向解法[J].武漢大學學報:信息科學版,2011,36(6):670-673.
[13]DIEBELJ.Representingattitude:Eulerangles,unitquaternions,androtationvectors[J].Matrix,2006.
[14]KUIPERSJB.Quaternionsandrotationsequences[M].Princeton:Princetonuniversitypress,1999.
[15]李德仁,鄭肇葆.解析攝影測量學[M].北京:測繪出版社,1992.
[16]周秋生.測量控制網優化設計[M].北京: 測繪出版社,1992.
[17]武漢大學測繪學院測量平差學科組.誤差理論與測量平差基礎[M].武漢: 武漢大學出版社,2009.
[責任編輯:張德福]