液路浮動斷接器安裝精度及優化控制方法
2015-12-23 06:48:54王偉臣李興乾柏林厚
航天器環境工程 2015年3期
關鍵詞:支架
李 喆,王偉臣,李興乾,柏林厚,鄭 昊
(中國空間技術研究院 載人航天總體部,北京 100094)
0 引言
為延長長期在軌航天器的運行壽命并提高其綜合效益,推進劑在軌加注已經成為此類航天器設計中的必選項。在加注航天器和被加注航天器通過對接機構連接為剛性組合體之后,須使用液路浮動斷接器將加注管路連通,形成密封的通道,從而具備推進劑在軌加注的條件。液路浮動斷接器的主、被動端分別安裝在兩個航天器上,兩航天器間和航天器內部均存在安裝誤差,因此液路浮動斷接器需具備一定的浮動能力以適應在插合過程中各安裝環節引起的總誤差[1-2]。本文旨在通過對各安裝環節的誤差分析,科學、合理地制定液路浮動斷接器浮動能力指標,并探求減少誤差傳遞鏈路從而對安裝精度進行優化控制的方法。
1 液路浮動斷接器工作原理
如圖1所示,液路浮動斷接器采用插入式結構,分為主動端和被動端。被動端安裝于被加注航天器上,采用簡單的套筒結構以提高對接可靠性。主動端安裝在加注航天器上,由插入管、驅動模塊和浮動模塊3 部分組成。插入管是推進劑通路,在驅動模塊驅動下伸出且插入到被動端的套筒內。插入管上設置有密封圈,與被動端的套筒內壁接觸并壓緊,以實現密封連接。驅動模塊負責驅動插入管和浮動模塊的推出或拉回,實現插合和分離功能。浮動模塊實現對插入管橫向和角度的浮動,以適應對接誤差[3-4]。
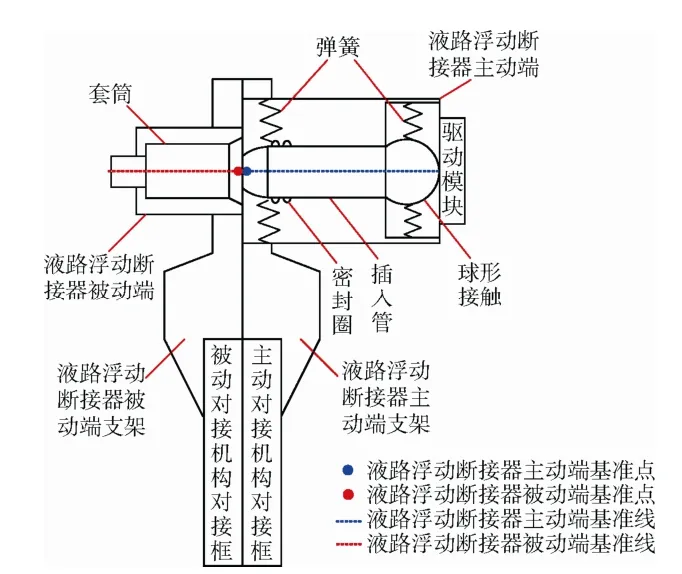
圖1 液路浮動斷接器結構示意 Fig.1 Configuration of the fluid floating coupling
設液路浮動斷接器橫向浮動能力為ΔO,角度浮動能力為Δα。當主動端基準點與被動端基準點橫向位移≤ΔO,且主動端基準線與被動端基準線夾角≤Δα時,插入管可以可靠地插入套筒內(如圖2所示)。

圖2 液路浮動斷接器橫向浮動和角度浮動示意 Fig.2 Lateral and angular floating ability of the fluid floating coupling
2 坐標系定義
2.1 對接機構坐標系
定義主、被動對接機構坐標系Odaxdaydazda,Odpxdpydpzdp,如圖3、圖4所示[5-6]。
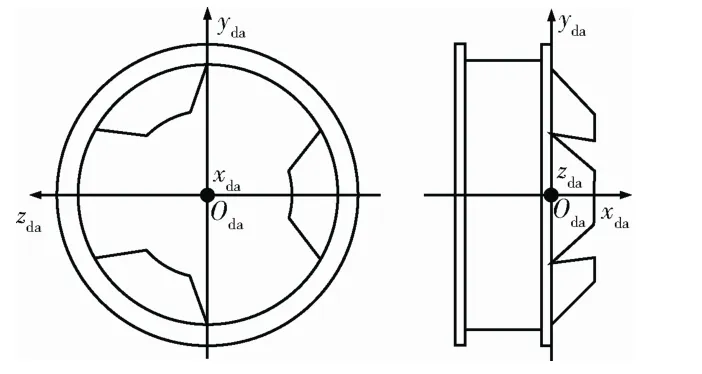
圖3 主動對接機構坐標系 Fig.3 Coordinate system of the active docking mechanism
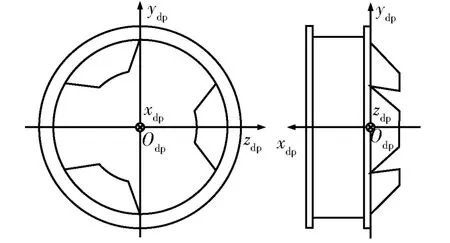
圖4 被動對接機構坐標系 Fig.4 Coordinate system of the passive docking mechanism
2.2 液路浮動斷接器坐標系
定義液路浮動斷接器主、被動端坐標系Ofaxfayfazfa,Ofpxfpyfpzfp,如圖5、圖6所示。
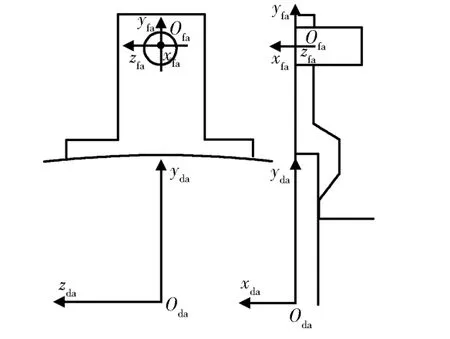
圖5 液路浮動斷接器主動端坐標系 Fig.5 Coordinate system of the active end of the fluid floating coupling
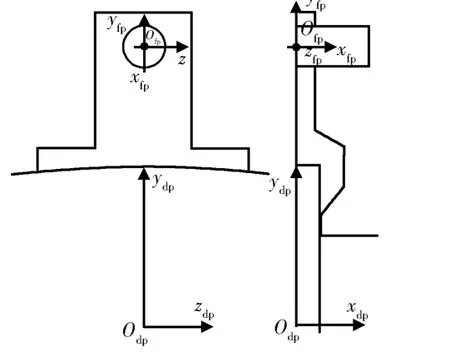
圖6 液路浮動斷接器被動端坐標系 Fig.6 Coordinate system of the passive end of the fluid floating coupling
2.3 液路浮動斷接器安裝支架坐標系
定義液路浮動斷接器主、被動端支架坐標系Ohaxhayhazha,Ohpxhpyhpzhp,如圖7、圖8所示。
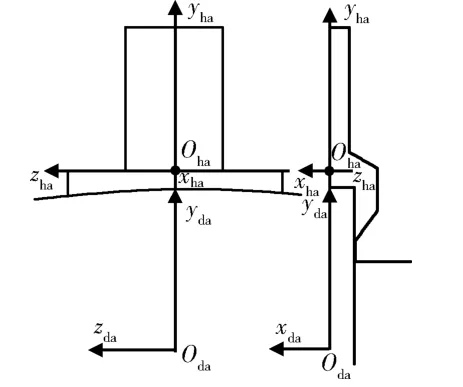
圖7 液路浮動斷接器主動端支架坐標系 Fig.7 Coordinate system of the active-end holder
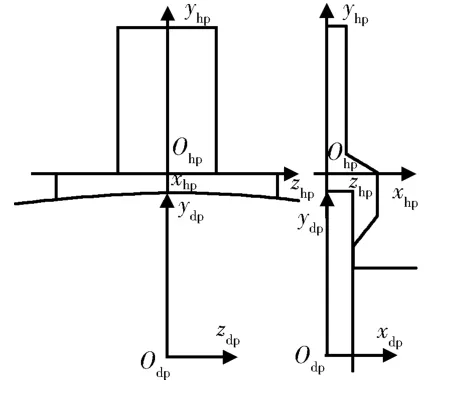
圖8 液路浮動斷接器被動端支架坐標系 Fig.8 Coordinate system of the passive-end holder
3 安裝環節及誤差源分析
由于存在安裝誤差,導致Ofa和Ofp存在位移 誤差并且xfa軸和xfp軸存在角度誤差,而這兩項誤差將直接關系液路浮動斷接器在軌是否能可靠插合。本文研究的對象即為這兩項誤差,以及導致這兩項誤差的各環節安裝誤差。
3.1 安裝環節分析
液路浮動斷接器共存在5 個安裝環節,如圖9所示:
A——液路浮動斷接器主動端與其支架的安裝環節;
B——主動對接機構與液路浮動斷接器主動端支架的安裝環節;
C——主動對接機構與被動對接機構的在軌對接環節;
D——被動對接機構與液路浮動斷接器被動端支架的安裝環節;
E——液路浮動斷接器被動端與其支架的安裝環節。
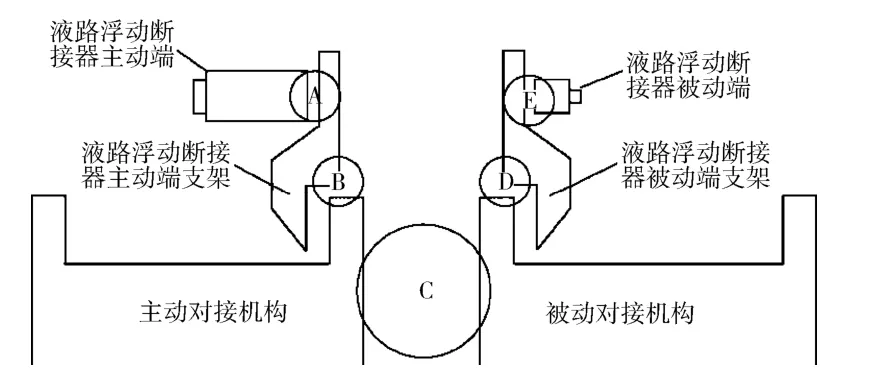
圖9 液路浮動斷接器安裝環節 Fig.9 Installation links of the fluid floating coupling
3.2 誤差源分析
3.2.1 液路浮動斷接器相對支架的安裝誤差分析
假設液路浮動斷接器主、被動端與其各自支架的安裝界面的加工等級和安裝方式相同,因此主、被動端與支架之間按照相同的安裝誤差進行分析,下面以主動端為例展開分析。
如圖10(a)所示,將液路浮動斷接器坐標系原點Ofa與其在支架坐標系下理論安裝點之間沿zha軸的位移誤差定義為支架坐標系下液路浮動斷接器z軸誤差,設其最大值為ΔOhL;將沿yha軸的位移誤差定義為支架坐標系下液路浮動斷接器y軸誤差,設其最大值為ΔOhU。
如圖10(b)所示,將液路浮動斷接器坐標系xfa軸與支架坐標系xha軸之間的夾角定義為支架坐標系下液路浮動斷接器角度誤差,設其最大值為Δαhf。
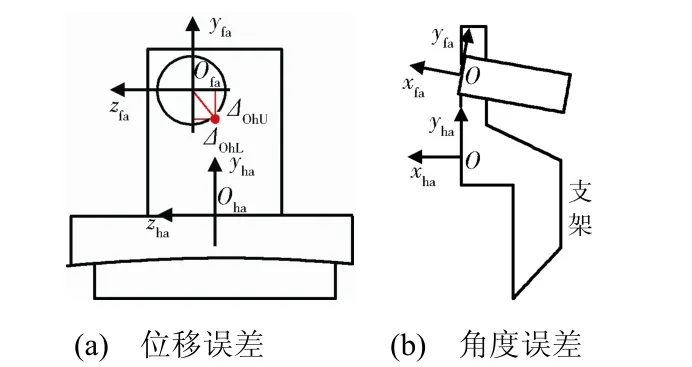
圖10 液路浮動斷接器與支架相對安裝誤差 Fig.10 Installation error between the fluid floating coupling and its end holder
液路浮動斷接器與支架通常采用組合加工,ΔOhL、ΔOhU、Δαhf相對容易控制,因此這三者對Ofa和Ofp的位移誤差以及xfa軸和xfp軸的角度誤差影響較小。
3.2.2 液路浮動斷接器支架相對對接機構的安裝 誤差分析
假設液路浮動斷接器主/被動端支架與主/被動對接機構的安裝界面的加工等級和安裝方式相同,因此主/被動端與主/被動對接機構之間按照相同的安裝誤差進行分析,下面以主動端為例展開分析。
如圖11(a)所示,將支架坐標系原點Oha與其在對接機構坐標系下理論安裝點之間沿yda軸的位移誤差定義為對接機構坐標系下支架y軸誤差,設其最大值為ΔOdU;將沿zda軸的位移誤差定義為對接機構坐標系下支架z軸誤差,設其最大值為ΔOdL。
如圖11(b)所示,將支架坐標系xha軸與對接機構坐標系xda軸之間的夾角定義為對接機構坐標系下支架角度誤差,設其最大值為Δαdh。
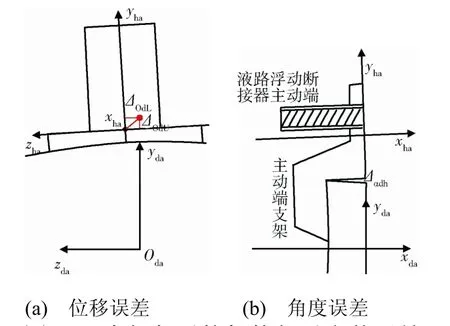
圖11 支架與對接機構相對安裝誤差 Fig.11 Installation error between the docking mechanism and the holder
ΔOdU、ΔOdL在安裝過程中可通過調整墊片和螺釘與支架通孔間的間隙,從而保持在相對較小的范圍內,因此ΔOdU、ΔOdL對Ofa和Ofp的位移誤差影響相對較小。
支架與對接機構之間為L 型安裝面,安裝形式的不對稱性和L 型安裝面導致的角度不易調整,使Δαdh成為影響xfa軸和xfp軸之間角度誤差的最大因素。
3.2.3 主、被動對接機構的在軌對接誤差分析
1)對接機構橫向誤差及其影響
將主、被動對接機構鎖緊后兩對接機構坐標系原點Oda和Odp的位移誤差定義為對接機構橫向誤差,設其最大值為ΔOd,則有

式中:c為對接機構導向銷/套兩邊最小間隙;d為導向銷/套在對接機構上徑向分布誤差。由導向銷/套兩邊間隙導致的橫向誤差為c/cos 30°,由導向銷/套在對接機構上徑向分布誤差導致的橫向誤差為2dsin 30°,如圖12和圖13所示。

圖12 導向銷/套配合間隙 Fig.12 Fitting clearance between the guide pin and the guide cage
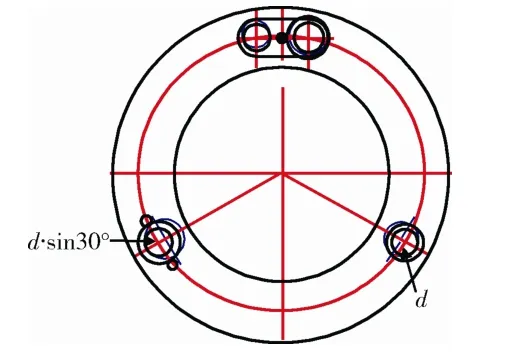
圖13 導向銷/套徑向分布誤差 Fig.13 Radial distribution errors of the guide pin and the guide cage
為了保證導向銷、導向套和導向銷套順利插合,且插合力和分離力的大小適當,通常c的取值較大,對d的要求也相對寬松,導致ΔOd較大,從而對Ofa和Ofp的位移誤差影響較大。
2)對接機構軸向誤差及其影響
將主、被動對接機構鎖緊后兩對接機構坐標系yda軸和ydp軸的角度誤差定義為對接機構軸向誤差,設單個導向銷(導向套、導向銷套)軸向最大分布誤差為Δδ,則對接機構軸向誤差最大值為2Δδ,如圖14所示。
對接機構半徑較大,因此導向銷、導向套和導向銷套軸向分布誤差Δδ對Ofa和Ofp的位移誤差影響較大。
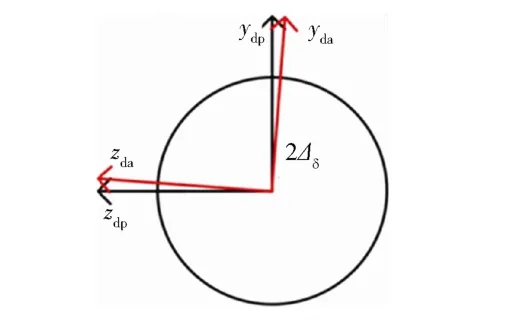
圖14 主、被動對接機構鎖緊后軸向誤差 Fig.14 Axial error of the docking mechanism
3)對接機構角度誤差及其影響
圖15中,將主、被動對接機構鎖緊后兩對接機構坐標系xda軸和xdp軸的角度誤差定義為對接機構角度誤差,設其最大值為Δαd,則有

式中:e為主、被動對接機構鎖緊后對接面的最大間隙;f為主、被動對接機構對接框平面度;L為對接框直徑。
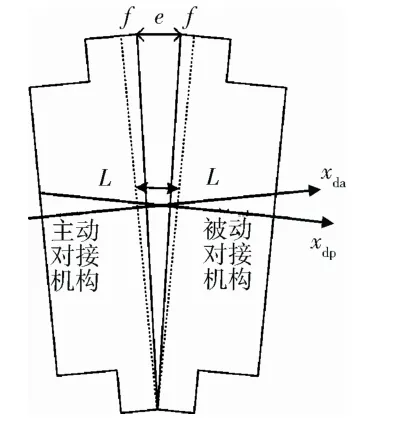
圖15 主、被動對接機構角度誤差 Fig.15 Angular error of the docking mechanism
L相對e、f較大,因此Δαd值相對較小,對xfa軸和xfp軸的角度誤差影響較小。
4 最大誤差傳遞分析
根據上述誤差源分析可知,地面各安裝環節的誤差可在同一方向累加,也可在相反方向上抵消,因此,在分析過程中需按照誤差同向放大進行分析,來確定液路浮動斷接器的浮動能力指標;在實際安裝過程中,則應該按照將誤差反向抵消的原則進行控制,以確保安裝誤差小于液路浮動斷接器的浮動能力。下面按照誤差同向放大原則進行位移誤差和角度誤差分析。
4.1 Ofa 和Ofp 的最大位移誤差分析
在主/被動對接機構鎖緊后對接機構橫向誤差、對接機構坐標系下支架z軸誤差、支架坐標系下液路浮動斷接器z軸誤差均為同向的極限情況下,Ofa和Ofp的位移誤差達到最大,如圖16所示。
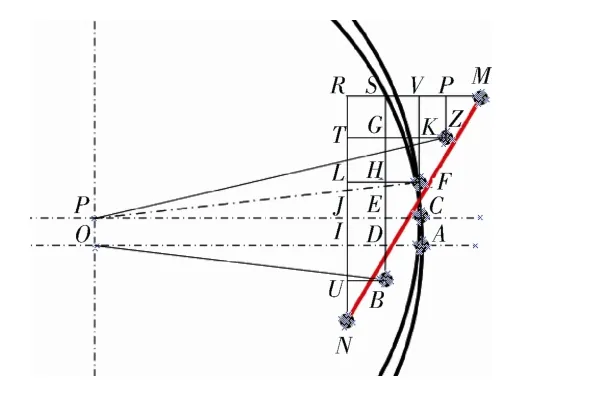
圖16 液路浮動斷接器橫向極限誤差 Fig.16 The extreme lateral error of the fluid floating coupling
1)A、C分別代表液路浮動斷接器主、被動端理論位置點,若A點偏離至C點,則表征為ΔOd,且有ⅠJ=DE=AC=OP=ΔOd;
2)若C點偏離至F點,∠CPF=2Δδ,則有JL=EH=CF≈LΔδ(注:Δδ為弧度);
3)若F點偏離至Z點,則表征為ΔOdL和ΔOdU影響,LT=HG=KF≈ΔOdL,VP=KZ≈ΔOdU;
4)同樣地,被動端UⅠ=BD≈ΔOdL,SV=AD≈ΔOdU;
5)若Z點偏離至M點,則表征為ΔOhL和ΔOhU影響,RT=ZP≈ΔOhL,PM=ΔOhU; 6)同樣地,被動端UN≈ΔOhL,RS=UB=ΔOhU; 7)則有MN=[(ΔOd+LΔδ+2ΔOhL+2ΔOdL)2+4(ΔOhU+ΔOdU)2]1/2。
綜上,在二維平面下,Ofa和Ofp的位移誤差最大為[(ΔOd+LΔδ+2ΔOhL+2ΔOdL)2+4(ΔOhU+ΔOdU)2]1/2。
4.2 xfa 軸和xfp 軸的最大角度誤差分析
在極限情況下,當Δαd、Δαdh、Δαhf均為向同一方向產生誤差時,xfa軸和xfp軸的角度誤差最大,為2Δαdh+2Δαhf+Δαd,即2Δαdh+2Δαhf+2arcsin [e/(2L)]+ 2arctan(f/L)。液路浮動斷接器角度浮動能力應≥2Δαdh+ 2Δαhf+2arcsin[e/(2L)]+2arctan(f/L)。
4.3 立體模型分析
對接機構是個空間機構,而上述分析僅采用二維分析法,因此液路浮動斷接器安裝誤差還需從空間立體角度考慮。對接面存在間隙,導致液路浮動斷接器主動端插入管伸出后延伸一段距離才可到達被動端柱塞口。結合液路浮動斷接器主、被動端存在的角度誤差,要求液路浮動斷接器增大一定的橫向浮動能力來克服此誤差,具體為圖17中h所示。因L?g,所以h≈L(1-cosΔαd)。
綜上,液路浮動斷接器橫向浮動能力應≥[(ΔOd+LΔδ+2ΔOhL+2ΔOdL)2+4(ΔOhU+ΔOdU)2]1/2+L(1- cosΔαd)。
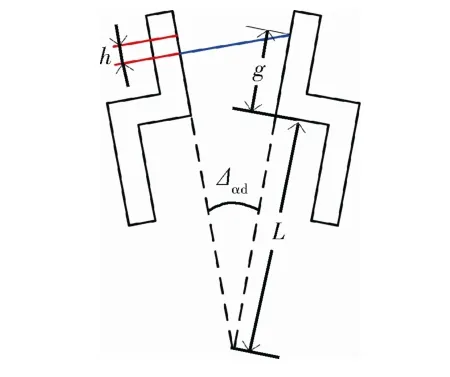
圖17 立體模型分析下的液路浮動斷接器橫向誤差 Fig.17 Lateral error of the fluid floating coupling by 3D model analysis
5 安裝精度控制措施
在實際安裝過程中,可按上述分析過程在各個安裝環節進行精度測量和安裝精度控制。但若對各個環節均進行精測和控制,所帶來的測量基準轉換誤差和測量誤差產生積累,將影響最終誤差判斷的準確性和控制精度[7-15]。
在對接機構坐標系下直接控制液路浮動斷接器的安裝精度,可以將精測和控制環節由5 個減至3 個,從而簡化安裝精度控制設計,使復雜系統的誤差傳遞鏈路達到最小,如圖18所示。
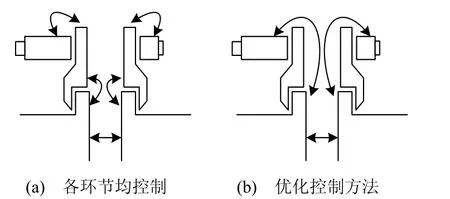
圖18 各環節均控制與優化控制方法的鏈路對比 Fig.18 Optimized links for the installation control of fluid floating coupling
優化控制方法后考慮的3 個安裝環節為:
1)液路浮動斷接器主動端與主動對接機構的安裝環節;
2)液路浮動斷接器被動端與被動對接機構的安裝環節;
3)主動對接機構與被動對接機構的在軌對接環節。
5.1 優化控制方法
如圖19所示,在對接機構坐標系的Odaydazda平面內,設液路浮動斷接器坐標系的Ofa理論位置為圖中的紅點。實際安裝過程中,在對接機構坐標系下直接測量液路浮動斷接器坐標系的Ofa坐標,并通過調整液路浮動斷接器支架與對接機構的 安裝環節或者調整液路浮動斷接器與支架的安裝環節,控制Ofa與理論位置間的誤差沿yda軸向保持在ΔU以內,沿zda軸向保持在ΔL以內,則必然有:ΔU≤ΔOhU+ΔOdU且ΔL≤ΔOhL+ΔOdL。
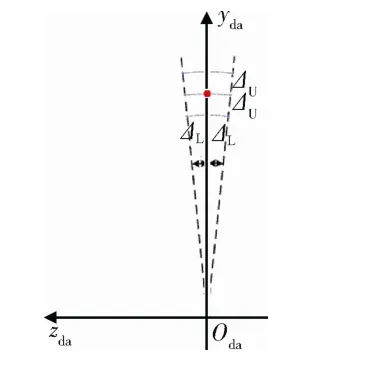
圖19 斷接器在對接機構坐標系下的安裝精度控制Fig.19 Installation error of fluid floating coupling in docking mechanism coordinates
在對接機構坐標系下直接測量液路浮動斷接器坐標系xfa軸與xda軸的夾角,并通過調整液路浮動斷接器與支架的安裝環節,控制該夾角保持在Δαdf以內,且Δαdf≤Δαdh+Δαhf。
5.2 橫向浮動能力分析
在主、被動對接機構鎖緊后橫向誤差與在對接機構坐標系下液路浮動斷接器z軸誤差重合的極限情況下討論液路浮動斷接器的橫向浮動能力,如 圖20所示。
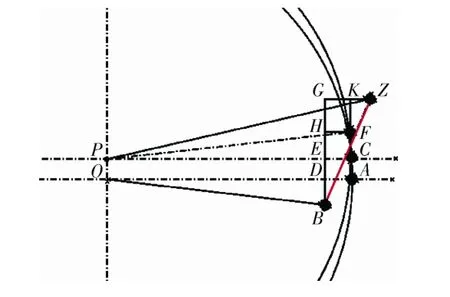
圖20 液路浮動斷接器橫向誤差 Fig.20 Lateral error of the fluid floating coupling
1)A、C分別代表液路浮動斷接器主、被動端的理論位置點,若A點偏離至C點,則表征為ΔOd,且有DE=AC=OP=ΔOd;
2)若C點偏離至F點,∠CPF=2Δδ,則有EH=CF≈LΔδ(注:Δδ為弧度);
3)若F點偏離至Z點,則表征為ΔL和ΔU影響,HG=KF≈ΔL,KZ≈ΔU;
4)同樣地,被動端BD≈ΔL,AD≈ΔU;
5)則有BZ=[(ΔOd+LΔδ+2ΔL)2+4ΔU2]1/2。
同時考慮對接機構立體模型,在上述控制方法控制下,Ofa和Ofp的最大位移誤差為[(ΔOd+LΔδ+ 2ΔL)2+ 4ΔU2]1/2+L(1-cosΔαd)。
5.3 角度浮動能力分析
在極限情況下,Δαdf和Δαd均為向同一方向產生誤差時,xfa軸和xfp軸的角度誤差最大,為2Δαdf+Δαd,即2Δαdf+2arcsin[e/(2L)]+2arctan(f/L)。
6 試驗驗證
按上述分析結果確定某加注和被加注載人航天器液路浮動斷接器的橫向浮動能力和角度浮動能力,并按照精度優化控制措施實際采用液路浮動斷接器和對接機構產品進行了安裝驗證。精測結果表明,液路浮動斷接器主、被動端的相對橫向和角度誤差均小于其浮動能力。
進一步在液路浮動斷接器系統級插合/分離試驗中進行驗證。試驗結果表明,在對接機構多次鎖緊且鎖緊誤差隨機的情況下,液路浮動斷接器均可正常完成插合、分離操作,其性能指標滿足設計要求,證明本文提出的方法有效。
7 結束語
文章建立了液路浮動斷接器安裝精度分析模型,對每個安裝環節的誤差源以及誤差傳遞鏈路進行分析,按照各環節極限誤差累積的方法確定液路浮動斷接器浮動能力要求,并且提出了在對接機構坐標系下直接控制液路浮動斷接器安裝精度的控制措施,可使復雜系統的誤差傳遞鏈路達到最小,且確保液路浮動斷接器實際安裝精度小于或等于其浮動能力,從而保障其在軌順利插合、分離。
(References)
[1] 張海濤,石德樂,李振宇.基于ADAMS 的空間斷接器仿真研究[J].航天器工程,2010,19(3): 52-56 Zhang Haitao,Shi Dele,Li Zhenyu.Research of disconnect coupling simulation based on ADAMS[J].Spacecraft Engineering,2010,19(3): 52-56
[2] CARDIN J.A standardized spacecraft resupply interface,AIAA91-1841[R],1991
[3] Farrell W Jr.Fluid quick disconnect coupling for International Space Station Alpha,AIAA95-2353[R],1995
[4] 馬海濤,陳健,魏青,等.一種在軌補加用浮動斷接器設計[J].火箭推進,2011,37(4): 45-49 Ma Haitao,Chen Jian,Wei Qing,et al.Design of floating coupling for on-orbit resupply[J].Journal of Rocket Propulsion,2011,37(4): 45-49
[5] 劉志,崔宇新,張崇峰.國際對接系統標準探究[J].載 人航天,2014,20(2): 152-154 Liu Zhi,Cui Yuxin,Zhang Chongfeng.Study on international docking system standard[J].Manned Spaceflight,2014,20(2): 152-154
[6] 徐敏,聶宏,陳金寶,等.空間弱撞擊對接機構工作空間與精度分析[J].機械設計與制造,2014(8): 130-133 Xu Min,Nie Hong,Chen Jinbao,et al.The workspace and kinematic analysis and simulation research of the low-impact mating system[J].Machinery Design &Manufacture,2014(8): 130-133
[7] 楊再華,孫剛,郭潔瑛.空間實驗室的精度測量新方法[J].航天器環境工程,2009,26(5): 452-454 Yang Zaihua,Sun Gang,Guo Jieying.A new precision measurement method used in space lab assembling[J].Spacecraft Environment Engineering,2009,26(5): 452-454
[8] 楊再華.航天器總裝精度測量方法分析[J].航天器環境工程,2007,24(6): 390-392 Yang Zaihua.An analysis of measurement technology in spacecraft assembly[J].Spacecraft Environment Engineering,2007,24(6): 390-392
[9] 任春珍,賈世錦,劉浩淼,等.激光跟蹤儀在交會對接微波雷達多徑試驗中的應用[J].航天器環境工程,2013,30(5): 550-554 Ren Chunzhen,Jia Shijin,Liu Haomiao,et al.Laser tracker used in multi-radius test of microwave radar for rendezvous and docking[J].Spacecraft Environment Engineering,2013,30(5): 550-554
[10] 楊春生,向樹紅,孫剛,等.一種新的經緯儀測量算法在航天器總裝中的應用研究[J].航天器環境工程,2009,26(5): 447-451 Yang Chunsheng,Xiang Shuhong,Sun Gang,et al.Application of a new measurement algorithm based on theodolite in spacecraft assembly[J].Spacecraft Environment Engineering,2009,26(5): 447-451
[11] 羅道江.一種相控陣天線安裝精度檢測與校準[J].電子機械工程,2011,27(4): 53-56 Luo Daojiang.Measurement and calibration of installation accuracy for a phased array antenna[J].Electro-Mechanical Engineering,2011,27(4): 53-56
[12] 沈祥開,向陽.激光跟蹤儀在檢測連鑄機安裝精度中的應用[J].冶金設備,2014(z1): 166-169 Shen Xiangkai,Xiang Yang.Application of laser tracker in installation accuracy inspection of continuous casting machine[J].Metallurgical Equipment,2014(s1): 166-169
[13] 吳旭維,吳志星,王東鋒,等.大型LNG 低溫儲罐內罐安裝精度控制技術[J].石油工程建設,2012,38(3): 67-69
[14] 馬俊太,朱光辰,郝平.航天密封艙設備安裝精度仿真分析方法[J].航天器工程,2014,23(3): 37-42 Ma Juntai,Zhu Guangchen,Hao Ping.Simulation analysis method of mounting accuracy of space sealed cabin equipment[J].Spacecraft Engineering,2014,23(3): 37-42
[15] 李凱,齊慶祝,武萬斌.焊裝白車身車門安裝精度控制方法[J].汽車工程師,2012(5): 47-49 Li Kai,Qi Qingzhu,Wu Wanbin.Precision control methods of assembly of welding body in-white door[J].Auto Engineer,2012(5): 47-49
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
