移動配載控制系統(tǒng)在航標(biāo)船中的應(yīng)用
2015-12-21 03:17:10史金山徐應(yīng)年
交通科技 2015年4期
關(guān)鍵詞:船舶
史金山 徐應(yīng)年
(1.武漢南華工業(yè)設(shè)備工程股份有限公司 武漢 430223; 2.武漢理工大學(xué)自動化學(xué)院 武漢 430063)
移動配載控制系統(tǒng)在航標(biāo)船中的應(yīng)用
史金山1徐應(yīng)年2
(1.武漢南華工業(yè)設(shè)備工程股份有限公司武漢430223;2.武漢理工大學(xué)自動化學(xué)院武漢430063)
摘要在帶有吊機(jī)的航標(biāo)船上,當(dāng)?shù)跹b貨物時船體會傾斜,如不加以控制會導(dǎo)致船舶發(fā)生傾覆的嚴(yán)重事故。文中采用移動配載方式來解決此問題,通過控制配載重物在船體橫向來回移動,用以平衡吊機(jī)工作時造成的船體傾斜,使船體保持基本平衡。采用PLC(programmable logic controller)作為主控制器,變頻器驅(qū)動交流電機(jī),電機(jī)帶動齒輪齒條帶動配載重物移動。在控制算法上,采用模糊控制算法,建立模糊控制規(guī)則并經(jīng)實(shí)船調(diào)試的反復(fù)調(diào)整,最終在實(shí)船達(dá)到比較滿意的控制效果。
關(guān)鍵詞移動配載模糊控制PLC
在很多工程船舶甲板上通常設(shè)置有吊機(jī)用來吊裝重的設(shè)備或貨物,當(dāng)?shù)鯔C(jī)吊裝重物吊臂旋轉(zhuǎn)時會引起船舶的傾斜,傾角過大可能會導(dǎo)致船舶的傾覆,釀成重大事故。為了避免事故的發(fā)生,南京航標(biāo)船配置了一套移動配載自動控制系統(tǒng),該船長40 m,寬7 m,可根據(jù)吊機(jī)吊裝重物時船體的傾斜方向和角度,實(shí)時改變船的配載,用以消除重物造成的船體傾斜。
1 工作原理
所謂移動配載,顧名思義就是根據(jù)船體傾斜角度的變化移動重物來改變船體的配載。具體實(shí)現(xiàn)為在船的寬度方向底艙設(shè)置由槽鋼制作的軌道,一塊重5 t的可移動配置鐵塊通過滾輪放置在軌道上,采用齒輪帶動齒條的傳動方式,當(dāng)電機(jī)轉(zhuǎn)動時,動力通過減速箱減速,帶動齒輪旋轉(zhuǎn),齒輪帶動齒條運(yùn)動,齒條拉動配置鐵塊在導(dǎo)軌上運(yùn)動。通過改變電機(jī)的旋轉(zhuǎn)方向?qū)崿F(xiàn)配載沿縱向中心線兩側(cè)方向運(yùn)動,通過移動配重鐵塊的位置來抵消吊機(jī)工作時帶來的船舶傾斜角度,使船舶始終處于相對平衡的狀態(tài)。
6 結(jié)語
除了上面列舉的故障模式和故障穿越分析和試驗,為保障安全性,整個電網(wǎng)包含AGP還需要做一系列分析和實(shí)驗來保證其功能得以實(shí)現(xiàn)和保持,如:軟件仿真測試;出廠試驗;海上認(rèn)可測試;海上FMEA分析測試;其他測試如硬件在環(huán)(HIL)測試等;DP年度試驗[4]。
在DP2作業(yè)時母排聯(lián)絡(luò)開關(guān)能閉合運(yùn)行的船舶,能夠根據(jù)負(fù)載選擇在線發(fā)電機(jī)的臺數(shù)并讓它們工作在最優(yōu)的狀況,這樣可以大幅提高燃油經(jīng)濟(jì)性,減少碳和其他有害氣體排放。雖然對船舶設(shè)備和系統(tǒng)提出了更高的要求,但其帶來的收益卻是長久的。
參考文獻(xiàn)
[1]李志壘.動力定位海洋工程船舶電力推進(jìn)系統(tǒng)的設(shè)計[D].天津:天津大學(xué),2013.
[2]劉楊.動力定位故障模式與影響分析[D].哈爾濱:哈爾濱工程大學(xué),2011.
[3]李東輝.船舶柴油發(fā)電機(jī)組的建模與運(yùn)行仿真研究[D].大連:大連海事大學(xué),2011.
[4]ABS Rules.Guide for dynamic positioning systems[S].2012.
圖1為移動配載工作時的3種狀態(tài),當(dāng)?shù)鯔C(jī)不工作時,吊桿在船體中心線上,移動配載也處于船體的中心線上不移動,見圖1a)。當(dāng)?shù)鯔C(jī)在船體左側(cè)起吊重物時,重物和吊機(jī)吊臂的重量會以中心線為轉(zhuǎn)軸,產(chǎn)生向左的扭轉(zhuǎn)力矩,會使船體向左傾斜,為了平衡此力矩,移動配置需向船體中心線右側(cè)移動,從而平衡掉向左的扭轉(zhuǎn)力矩,直到船體大致處于平衡狀態(tài),見圖1b)。當(dāng)?shù)鯔C(jī)在船體右側(cè)吊重物時,移動配置則向左側(cè)移動,直到船體大致處于平衡狀態(tài),見圖1c)。

圖1 移動配載工作狀態(tài)示意圖
2 控制系統(tǒng)實(shí)現(xiàn)方案
2.1系統(tǒng)框圖
控制系統(tǒng)實(shí)現(xiàn)采用PLC作為主處理器,采集吊車載重量、吊臂長度、吊臂仰角、船體傾斜、編碼器等數(shù)據(jù),在處理器中進(jìn)行算法判斷,輸出結(jié)果驅(qū)動變頻器對電機(jī)進(jìn)行調(diào)速,使得移動配載左右移動。同時將采集的各傳感器的數(shù)據(jù)以及移動配置的位置信息顯示在底艙本地顯示屏和駕駛室上位機(jī),為本地和遠(yuǎn)程操控人員提供直觀的數(shù)據(jù)信息,其系統(tǒng)框圖見圖2。
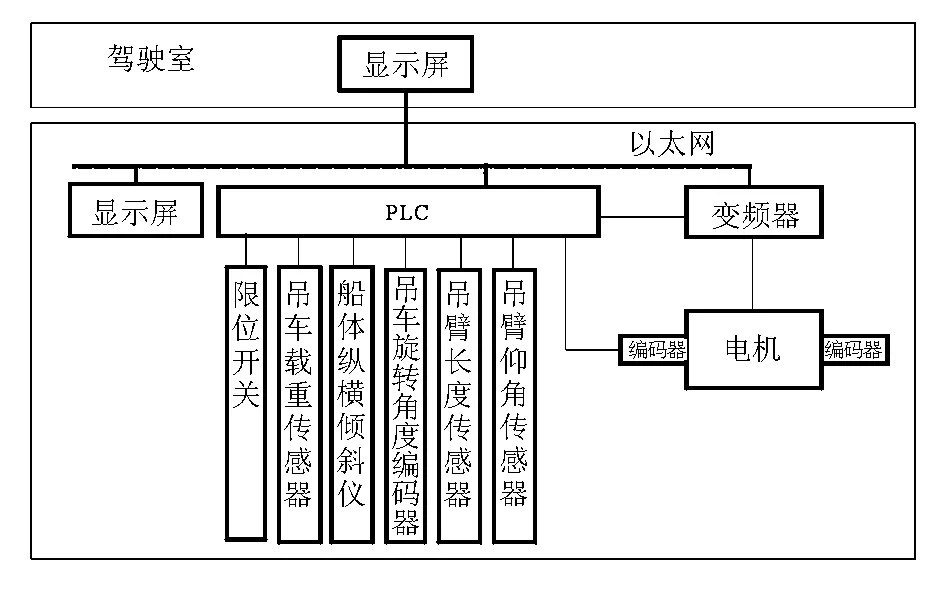
圖2 移動配載控制系統(tǒng)框圖
為了克服移動配載在運(yùn)動時的慣性,在需要停止時能夠快速靜止,配置了制動器和制動電阻,將多余的能量及時消耗,提高控制電機(jī)的精確度和穩(wěn)定性。
2.2控制部分實(shí)現(xiàn)
PLC采用西門子S7-200系列,CPU采用CPU224,自帶14 DI和10 DO,擴(kuò)展一個CP243-1以太網(wǎng)通信模塊,接入交換機(jī),擴(kuò)展2個EM231-8路模擬量輸入模塊。電機(jī)功率為4 kW,變頻器采用施耐德ATV61系列,變頻器啟動時帶負(fù)載啟動,啟動電流比較大,為留一定的裕量,因此變頻器選擇5.5 kW。
2.3顯示屏實(shí)現(xiàn)
選用西門子264.16 mm(10.4 in)觸摸屏MP277,該屏帶有以太網(wǎng)通信接口,通過接入交換機(jī)與PLC通信,在MP277中通過Wincc Flexible組態(tài)軟件開發(fā)界面,工作人員可以很直觀地監(jiān)視和控制移動配載,顯示界面可形象指示移動配載的位置和吊機(jī)的長度、角度、吊重等參數(shù),并提示報警信息。
2.4保護(hù)措施設(shè)計
移動配載控制系統(tǒng)關(guān)乎船體安全,一旦出現(xiàn)閃失將造成嚴(yán)重的損失和后果,因此需要設(shè)計周全的保護(hù)措施,具體如下:
(1) 在靠近艙壁的位置加裝防撞限位開關(guān),防止移動配載移動時由于慣性撞壞艙壁,通過PLC編程,當(dāng)限位開關(guān)動作時電機(jī)立即停止。
(2) 當(dāng)檢測到移動配載和吊機(jī)吊臂的位置在船體中心線同一側(cè)時,立即報警,并通過聯(lián)鎖,自動停止吊裝作業(yè),然后移動配載位置,使移動配載和吊機(jī)不在同側(cè)。
(3) 當(dāng)船體傾斜度大于5°時,報警信號同吊機(jī)聯(lián)鎖,當(dāng)發(fā)生報警時,吊機(jī)立即停止吊裝作業(yè),直到報警解除。
(4) 每次啟動時進(jìn)行系統(tǒng)自檢,通過自檢程序檢查控制系統(tǒng)的各個部件都能正常工作,防止在工作時由于控制系統(tǒng)的失效導(dǎo)致出現(xiàn)事故。
3 控制策略
本系統(tǒng)的控制模型是一個非常復(fù)雜的非線性時變模型,變量多,變量之間的耦合關(guān)系復(fù)雜,很難建立一個較準(zhǔn)確的模型實(shí)現(xiàn)對移動配載的精確控制,本項目作為實(shí)際工程應(yīng)用項目,沒必要花精力建立精確模型,因此在控制算法上,模糊控制算法是一種能夠快速解決問題的方法。模糊控制無須知道被控對象的數(shù)學(xué)模型,它易于實(shí)現(xiàn)對具有不確定性的對象和具有強(qiáng)非線性的對象進(jìn)行控制,對被控對象特性參數(shù)的變化具有較強(qiáng)的魯棒性,對控制系統(tǒng)的干擾具有較強(qiáng)的抑制能力[1]。
3.1模糊控制器

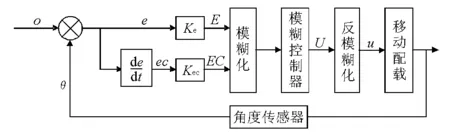
圖3 模糊控制系統(tǒng)框圖
3.2變量的模糊化和隸屬度函數(shù)
系統(tǒng)的輸入變量為船體傾斜角度偏差e、傾斜度偏差變化率δ,輸出變量為配載重物沿船體縱向中心線的位移值,當(dāng)船體傾斜角度偏差e向左傾斜時為負(fù)數(shù),向右傾斜時為正數(shù),不傾斜時為0,同理配載重物在船體縱向中心線左側(cè)時為負(fù)位移,右側(cè)為正位移,中心時為0。
系統(tǒng)中船體傾斜角度偏差e、傾斜度偏差變化率δ和控制量u的基本論域分別為:[-5,5],[-0.5,0.5]和[-3.5,3.5],E和EC分別為e和δ模糊化后的變量,U為輸出模糊變量。為了比較精確控制移動配載移動的位置,將輸入模糊變量E和EC的模糊論域和輸出變量U的模糊論域確定為[-3,3],量化為{-3,-2,-1,0,1,2,3},即分為7個控制檔位。 所對應(yīng)的模糊詞集為{左大,左中,左小,零,右小,右中,右大},對應(yīng)的符號表示為{LB,LM,LS,N,RS ,RM ,RB }。
其對應(yīng)變量的量化因子為Ke=3/5=0.6,Kδ=3/0.5=6,Ku=3/3.5=0.86。
由于三角形隸屬度函數(shù)在輸入值變化時比正態(tài)分布或高斯型具有更高的靈活性[2],因此本系統(tǒng)中船體傾斜度偏差與偏差變化率均選取三角形隸屬度函數(shù)。圖 4為各輸入變量的隸屬度函數(shù),選擇的模糊集寬度為7。因為寬度過小會造成部分區(qū)間空缺,可能找不到相應(yīng)的控制規(guī)則,收斂性不好; 寬度過大會造成控制規(guī)則的重疊部分過多,相互間影響加大并且響應(yīng)速度也變慢[3]。
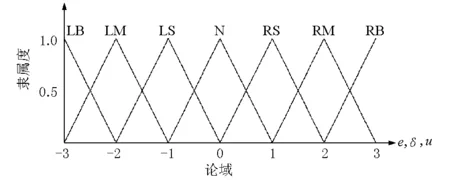
圖4 e,δ,u的隸屬度函數(shù)3.3 模糊控制規(guī)則
模糊控制規(guī)則是控制器的核心,根據(jù)經(jīng)驗總結(jié)并且實(shí)船調(diào)試時不斷調(diào)整得到49條控制語句,合并構(gòu)成移動配載控制系統(tǒng)模糊控制規(guī)則表,見表1。
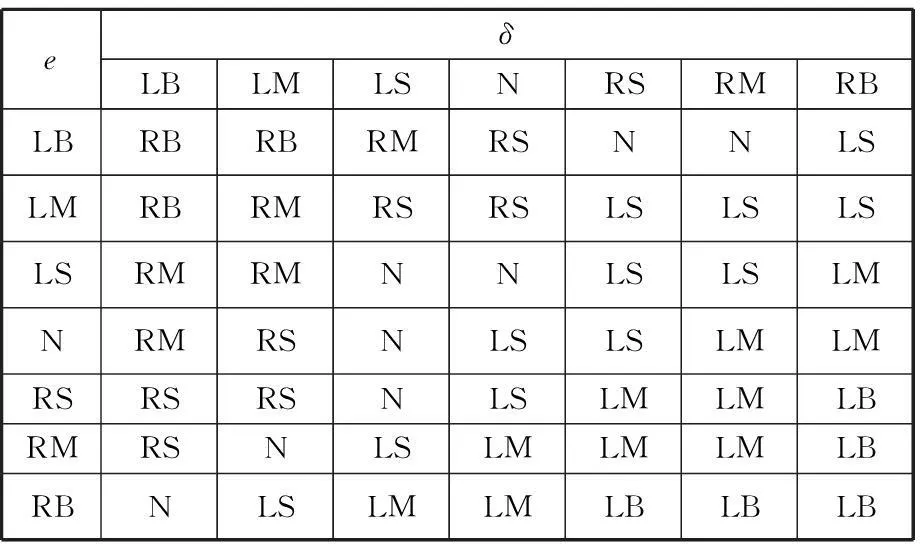
表1 模糊控制規(guī)則表
模糊控制查詢表通過使用MATLAB的模糊工具箱計算得到,具體操作方法為采用TOOL測試向量法[4]得到模糊控制查詢表,見表2。
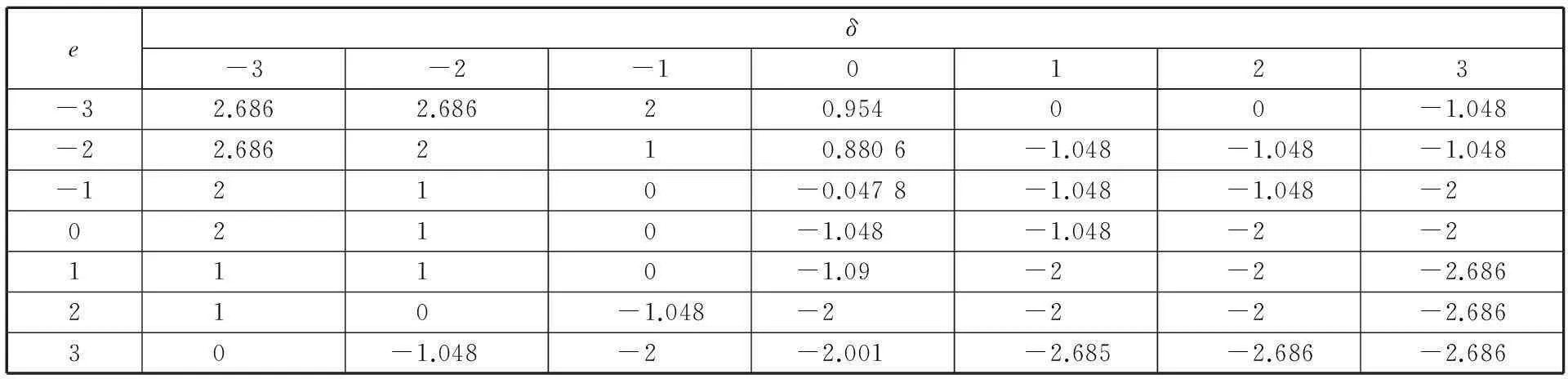
表2 模糊查詢控制表
3.3反模糊化
模糊控制器輸出的是經(jīng)過查詢模糊規(guī)則表后得出的一個模糊語言值,不能被被控對象直接使用,必須要轉(zhuǎn)換成一個精確的控制量,這就是反模糊化的過程。本系統(tǒng)采用重心法計算模糊控制輸出的精確控制量。其具體表達(dá)式為
式中:n為模糊變量個數(shù);ei為模糊變量;μ(ei)為對應(yīng)模糊變量的隸屬度。
本系統(tǒng)反模糊化的具體過程: 首先傾斜度誤差或其誤差變化率經(jīng)量化后得到相應(yīng)的量化等級,根據(jù)量化等級查詢執(zhí)行機(jī)構(gòu)在控制規(guī)則表中對應(yīng)的控制規(guī)則并使其激活。
4 PLC控制程序的實(shí)現(xiàn)
移動配載控制PLC程序主要包括輸入量的采樣程序、模糊化和量化等級程序、模糊控制查詢程序、執(zhí)行機(jī)構(gòu)控制程序等。這些程序各自建立子程序,在主程序中調(diào)用。
輸入量的采樣程序主要完成外部吊車載重量、吊臂長度、吊臂仰角、船體傾斜、編碼器等傳感器的數(shù)據(jù),所有的傳感器均采用4~20 mA信號,將模擬量信號采樣成PLC內(nèi)部對應(yīng)的數(shù)字量信號,存儲在V區(qū)。
模糊化和量化等級程序負(fù)責(zé)計算船體傾斜度偏差和偏差變化率,并作超限處理,使數(shù)據(jù)在設(shè)定的范圍內(nèi),數(shù)據(jù)處理后將船體傾斜度偏差和偏差變化率根據(jù)前文規(guī)則量化并模糊化。
模糊控制查詢程序?qū)嶋H是將反模糊化后的數(shù)據(jù)放置在一個7×7的二維數(shù)組中,通過指定存放的首地址和偏移地址對輸出值進(jìn)行訪問。
執(zhí)行機(jī)構(gòu)控制程序負(fù)責(zé)將查出的輸出值送與變頻器,告訴變頻器向那個方向移動電機(jī)多少距離從而帶動移動配載向抵消船體傾斜度方向移動一定的位置。
5 系統(tǒng)運(yùn)行效果
移動配載控制系統(tǒng)已在南京航道局航標(biāo)船寧道標(biāo)401,402船中使用,經(jīng)過實(shí)際使用反饋,該系統(tǒng)方案新穎,總體設(shè)計合理,安全措施考慮周到,控制算法切實(shí)可行,可在類似船舶中進(jìn)行推廣。
[1]丁琳,劉清.模糊自適應(yīng)控制及其在船舶操縱中的應(yīng)用[D]武漢: 武漢理工大學(xué),2002.
[2]屈 毅,寧鐸,賴展翅,等.基于模糊 PID 控制的溫室控制系統(tǒng)[J].計算機(jī)應(yīng)用,2009,29(7):1996-1999.
[3]于海業(yè),于立娟,陳麗梅.基于模糊控制算法的溫室變溫管理系統(tǒng)[J].農(nóng)機(jī)化研究,2008(5) :25-27.
[4]葉伊莎,任佳.基于Matlab的模糊查詢表生成方法探討[J].實(shí)驗室研究與探索,2014,33(5):101-106.
收稿日期:2015-06-08
Application of Control System for Mobile Loading in Beacon Boats
ShiJinshan1,XuYingnian2
(1.Wuhan Nanhua Industrial Equipments Engineering Co.,Ltd., Wuhan 430223, China;
2.School of Automation,Wuhan University of Technology, Wuhan 430063, China)
Abstract:If there are no preventive measures, beacon boats with crane would be apt to lean under lifting work. So, this study offers a method of setting mobile loading to avoid boats' leaning. This method is that the mobile loading is moved back and forth according to the boats' lean for balancing the boats. PLC was used as the main controller. The inverter drives motor to make the mobile loading to move by gears and racks. Fuzzy control algorithm was adopted in this control system. With local tests, we developed some fuzzy control rules for the mobile loading control. The actual measurement showed that the control system could achieve satisfactory results.
Key words:mobile loading; fuzzy control; PLC
DOI 10.3963/j.issn.1671-7570.2015.04.055
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
