基于運動約束的脈沖雷達游標測距方法
2015-12-20 05:30:18陳浩郭軍海齊巍
北京航空航天大學學報 2015年2期
陳浩,郭軍海,齊巍
(北京跟蹤與通信技術研究所,北京100094)
隨著靶場對脈沖雷達測距測速精度要求的越來越高,脈沖雷達高精度測距測速技術成為研究的熱點.國外實現的高精度測距技術是一種稱為距離游標的相位測距技術.距離游標技術[1-2]是美國于20世紀70年代發展起來的一種應用于全相參脈沖多普勒雷達的高精度相位測距技術.中國曾在20世紀80年代組織了相關領域的專家研究窄帶游標測距技術,但僅作了仿真分析,并沒有在實測數據上進行驗證.在利用距離游標方法進行脈沖雷達測距過程中,需要利用測速系統得到的多普勒頻率解多普勒相位增量模糊.而低重頻脈沖雷達存在嚴重的速度模糊[3-4],常用的解速度模糊方法有多重頻解模糊和基于距離微分的解模糊方法.最常用的多重頻方法為中國剩余定理方法(CRT)[5-6],但CRT方法最大的缺點是對噪聲極度敏感.為了解決噪聲敏感的問題,Trunk等提出了改進的CRT方法[7-8],但為了解速度模糊,對脈沖重復頻率有特殊的要求.根據多重頻脈沖雷達信號頻譜的稀疏特性,文獻[9]和文獻[10]將壓縮感知理論[11]應用于多重頻脈沖雷達解速度模糊.該方法比CRT方法對噪聲更具有魯棒性,但為了正確解速度模糊,需要構造冗余度很大的稀疏字典,導致計算量過大,不具有實用性.利用距離微分方法來解速度模糊是工程上常用的方法.而通常采用的“不變量”嵌入法[12]要求距離微分精度優于fr/2(fr為脈沖重復頻率),利用脈沖測距法不一定能滿足這個精度要求.我國目前在工程上無法實現距離游標技術的一個重要原因是不能解決這種解速度模糊和解相位模糊相互耦合的問題.
本文將目標的運動約束應用到距離游標方法中,提出一種同時解速度模糊和解相位模糊的耦合濾波器.利用目標的運動約束積累一段時間的測量數據進行UKF濾波[13]估計得到精度較高的速度解速度模糊,從而啟動耦合濾波器.然后利用無模糊的速度進行距離游標,再把距離游標得到的距離應用于下一時刻的速度并解速度模糊,一次進行下去把距離游標與多普勒測速耦合在同一個濾波器里面.
1 解相位模糊與解速度模糊耦合
1.1 距離游標基本原理
游標測距方程為:游標距離=基準距離+相對距離,其中的基準距離由雷達的測距系統得到,相對距離由相位測距方法得到.定義發射信號與回波信號的瞬時相位差為多普勒相位θd(t).通過計算相鄰回波間的多普勒相位增量:

式中,εi為通過I/Q回路測量得到的多普勒相位測量誤差;θi,θd(i)為多普勒相位真值.

式中t′i為第i個脈沖的回波時刻,可得到相位增量估計值,利用正確解相位模糊的前提條件可解相位模糊.
1.2 多普勒測速原理
當目標在雷達視線方向產生相對運動時,會產生多普勒效應.令產生的多普勒頻率為Fd,則多普勒頻率與徑向速度的關系為

式中,vr為目標的徑向速度;λ為發射脈沖波長.因此,對目標速度的測量可轉化為對多普勒頻率的測量,精密測量采用閉環測量法,用窄帶跟蹤濾波器和二階環路實現.
低重頻脈沖雷達測速回路可能跟蹤在信號頻譜上的任一根細譜線上,此時測出的多普勒頻率存在模糊:

式中,L為模糊譜線數;fd為模糊多普勒頻率;Fd為無模糊多普勒頻率.因此需要通過解模糊來得到無模糊的多普勒頻率.
2 基于運動約束的耦合濾波器
2.1 問題分析
高動態目標的距離游標本質上也是高機動目標跟蹤問題[14],可建立機動目標模型,利用脈沖雷達量測數據(若利用單臺脈沖雷達進行距離游標,量測數據為徑向距離R,方位角A和俯仰角E)進行自適應濾波.將自適應濾波得到的目標運動特征應用到距離游標里面.即根據機動目標跟蹤模型,建立基于目標運動約束的距離游標算法.常用的機動目標模型有參數回歸模型、運動學模型和動力學模型[15].其中常用的參數回歸模型有多項式模型和樣條函數模型,常用的運動學模型有常速(CV)模型、常加速度(CA)模型及“當前”統計(CS)模型[16]等.根據目標不同的運動特征,可選擇不同的運動模型建立相應的運動約束,將模型先驗信息用于融合估計,以更有效地提高估計精度.對于導彈自由段和衛星目標等,由于目標運動特征更為接近二體運動,能建立較為準確的動力學模型,選用動力學模型較為合適[17].對于機動較小的目標,可選擇CV模型和CS模型.對于導彈主動段等機動性較強且受力較為復雜,可建立CS模型來提供運動約束.對于CS模型,設狀態向量X=(x,,y,,z,)T,則
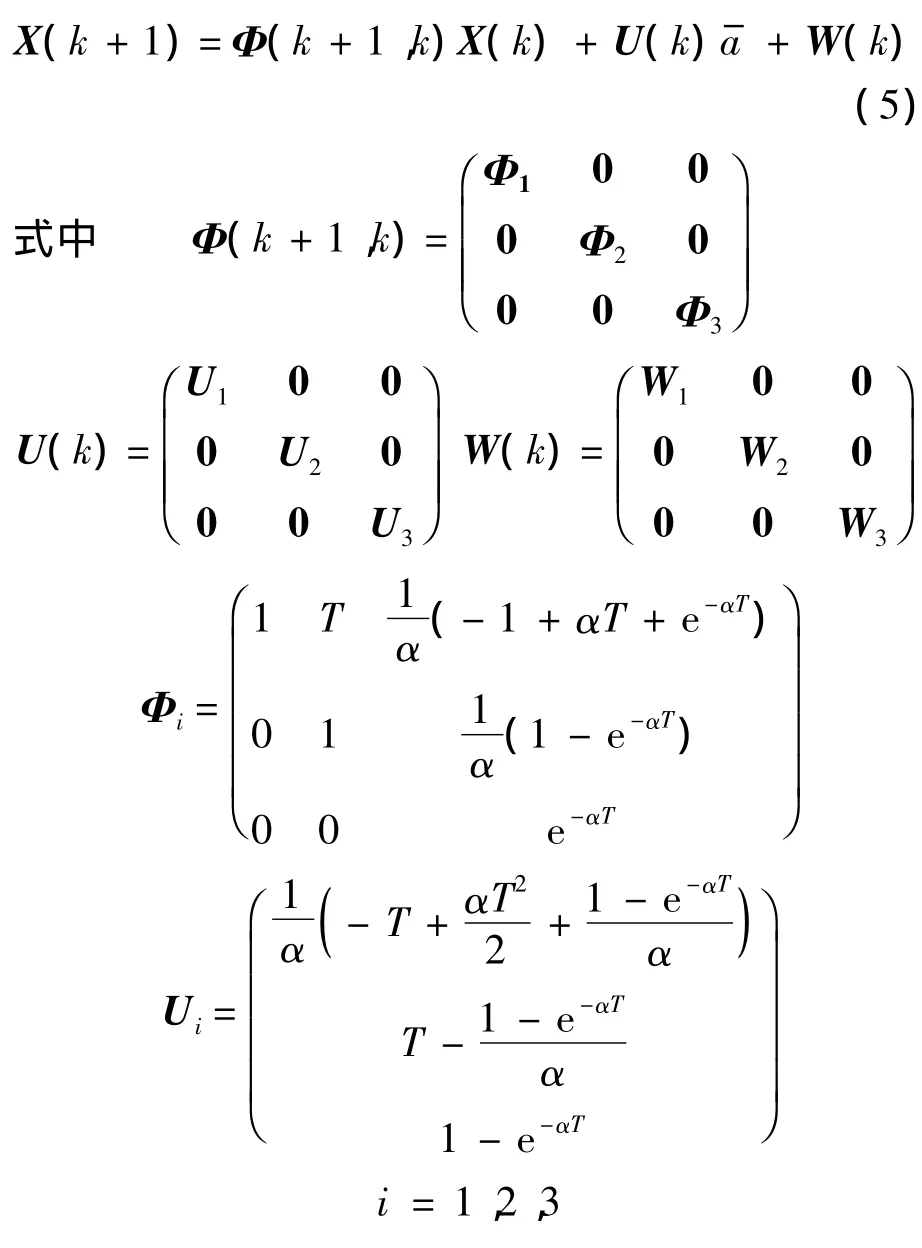

式中,W(k)為狀態噪聲序列;T為狀態轉移時間間隔.

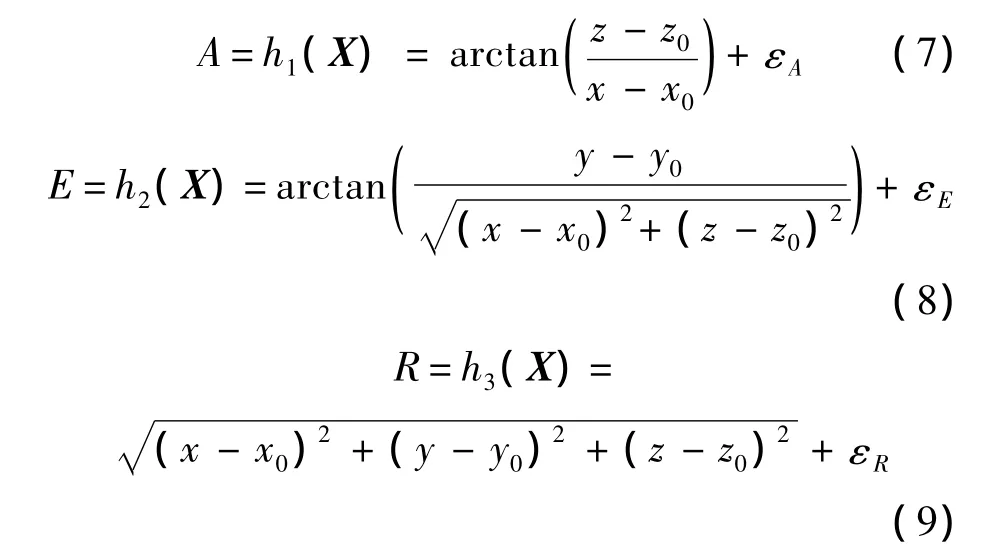
測量方程為

式中Y(k)為各測量設備測量元素組成的向量,Y(k)=[A1(k),…,An(k),E1(k),…,Rn(k),R1(k),…,Rn(k)],各測元的測量方程如下:
2.2 耦合濾波器流程
針對相位測距解模糊和多普勒測速相互耦合的問題,本文設計了一種迭代耦合濾波器(見圖1),可以同時解相位模糊和多普勒速度模糊.其基本思路為:對于高動態目標,利用文獻[18]提出的加速度估計算法準確估計目標加速度,進行加速度補償后可準確估計目標的模糊速度.再積累一段時間(t-L+1,t-L+2,…,t0時刻)脈沖雷達測量數據(脈沖測距得到的徑向距離、方位角A和俯仰角E)利用運動約束(動力學方程或運動學方程)進行UKF濾波可得到t0和t1時刻的徑向速度和,并以 t0時刻濾波得到的徑向距離作為距離游標的基準距離.結合得到的高精度的模糊速度可解速度模糊,得到無模糊的多普勒速度v0和v1.利用無模糊的v0和v1可以解多普勒相位增量模糊,從而得到t0和t1時刻的距離增量ΔR0,1和游標距離R1.用游標距離R1替代脈沖測距徑向距離R1并利用UKF濾波作一步預測得到t2時刻的徑向速度,用和模糊多普勒速度可得到無模糊的多普勒速度v2.利用無模糊的多普勒速度v1和v2可以解多普勒相位增量模糊,從而得到t1和t2時刻的距離增量ΔR1,2和游標距離R2.用游標距離 R2取代測量量可繼續進行UKF濾波得到下一時刻的速度并解速度模糊,距離游標可繼續進行下去.為了增加算法的穩健性,令=ΔRL,L+1/T,利用文獻[6]中提出的解模糊糾錯判斷方法對是否正確解多普勒相位增量模糊進行判斷.
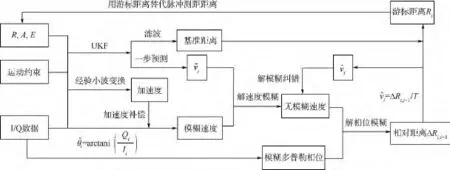
圖1 耦合濾波器圖Fig.1 Diagram of coupled filter
3 理論仿真與實測數據驗證
3.1 理論仿真
脈沖雷達參數選取為某經典單脈沖測量雷達,脈沖重復頻率fr=292 Hz,發射脈沖頻率為f0=5596 MHz,脈沖寬度 T=44.5 μs.選取的數據為某導彈主動段的徑向距離R、方位角A和俯仰角E,分別在測量數據上添加相應的測量誤差以仿真測量數據.輸入I/Q信號信噪比為12 dB,當信號信噪比為12 dB時,單脈沖測距誤差為6.12 m,方位角、俯仰角測角誤差均為 5 mrad,利用I/Q信號得到的多普勒相位測量噪聲為10.44°(包括接收機噪聲,模擬正交解調的幅相噪聲和量化誤差),多普勒頻率誤差為6 Hz.
針對主動段數據選取的是“當前”統計模型,并利用UKF濾波對數據進行積累以提高徑向速度的精度以及正確解速度模糊,從而啟動迭代耦合濾波器.圖2為用本文方法和傳統距離游標方法得到的相對距離誤差.圖3(a)為利用運動約束的距離游標算法得到的徑向距離誤差,圖3(b)為利用脈沖測距得到的徑向距離誤差,其中脈沖測距的隨機誤差為6.0366 m,本文方法的隨機誤差為0.075 8 m.從圖中可以看出,本文的方法能克服測距精度不高導致速度模糊與相位模糊相互耦合的問題,而傳統距離游標方法會出現解相位模糊出錯的情況導致距離誤差發生積累.從圖3可以看出本文的方法大大減小了徑向距離隨機誤差,從米級降至厘米級.
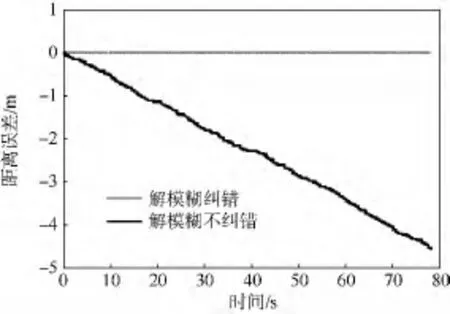
圖2 傳統距離游標與本文方法距離誤差對比Fig.2 Comparison of range error of traditional Vernier ranging method and method of this paper
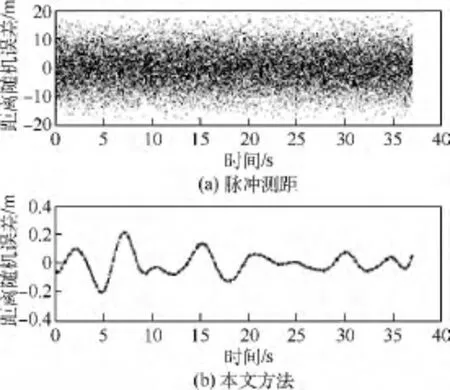
圖3 脈沖測距與本文方法得到的距離隨機誤差Fig.3 Random range error obtained by pulse ranging method of this paper
3.2 實測數據驗證
利用某型C波段雷達校飛數據進行距離游標,用勻速運動(CV)模型進行運動約束,用本文的基于運動約束的距離游標算法進行驗證,將得到的游標距離與GPS測得的目標徑向距離作比對.比較游標測距與脈沖測距測得的目標徑向距離誤差和隨機差.圖4為兩種測距方法的隨機誤差對比,圖5為游標測距的隨機誤差.圖6為兩種測距方法測得距離與GPS數據比對后得到的距離誤差對比.距離游標徑向距離隨機誤差均方根誤差為0.0685 m,脈沖雷達脈沖測距隨機誤差均方根誤差為1.1996 m.
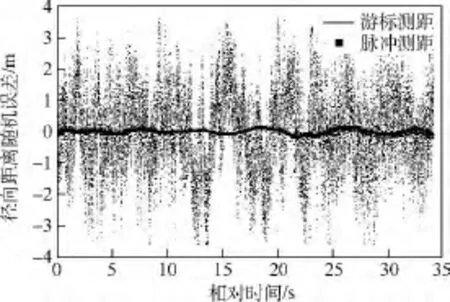
圖4 飛機跟蹤數據游標測距與脈沖測距隨機誤差對比Fig.4 Random range error comparison of pulse ranging method and method of this paper on measured data of airplane
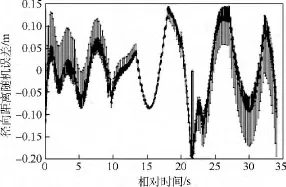
圖5 飛機跟蹤數據游標測距隨機誤差Fig.5 Random range error of Vernier range on measured data of airplane
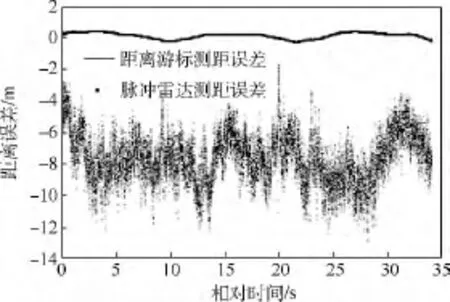
圖6 飛機跟蹤數據游標測距與脈沖測距誤差對比Fig.6 Random range error comparison of Vernier range and pulse range of measured data of airplane
對某型雷達測得的某衛星數據,用動力學模型進行運動約束,用本文的基于運動約束的距離游標算法進行驗證,得到的徑向距離隨機誤差如圖7和圖8所示,距離游標測距隨機誤差均方根誤差0.086 9 m,雷達脈沖測距誤差均方根誤差1.3632 m.
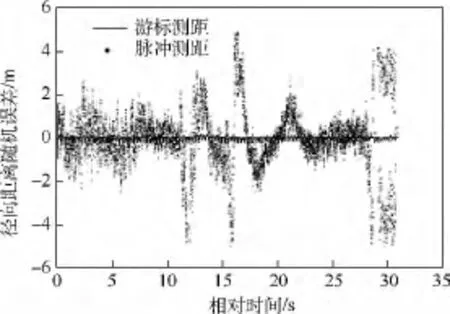
圖7 衛星數據游標測距與脈沖測距隨機誤差對比Fig.7 Random range error comparison of pulse ranging method and method of this paper on measured data of satellite
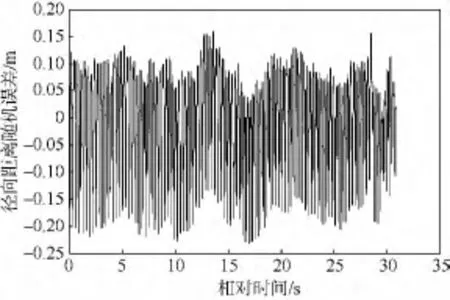
圖8 衛星數據游標測距隨機誤差Fig.8 Random range error of Vernier range on measured data of satellite
通過實測校飛數據對本文算法驗證可得,基于運動約束的距離游標算法能大大減小距離隨機誤差,將隨機誤差從米級降至厘米級.通過與GPS數據可以發現距離游標的測量誤差要比脈沖測距測量誤差小兩個數量級.雷達測得的衛星數據也驗證了本文算法的有效性,將隨機誤差減小兩個數量級.
4 結論
本文提出了一種基于運動約束的距離游標算法,通過仿真和實測數據驗證表明:
1)算法能克服相位模糊和速度模糊相互耦合的問題,大大減小了距離隨機誤差.
2)對高速飛行器主動段仿真數據可將距離誤差減小至少一個數量級至分米級.
3)對LY3901雷達測得的衛星和飛機跟蹤數據,該距離游標方法能將距離隨機誤差減小至少一個數量級至分米級.
References)
[1] Russell Roy.Range Vernier:USA,ADA-077178[P].1979-08-30.
[2] Pickett R B.Ambiguious range study report:USA,ADA-048612[P].1977-06-30.
[3] 謝潔,楊文軍,黎海林,等.低重復頻率下的目標速度估計算法研究[J].現代雷達,2010,32(9):36-39.Xie J,Yang W J,Li H L,et al.A study on target velocity estimation under low PRF condition[J].Modern Radar,2010,32(9):36-39(in Chinese).
[4] 劉一峰.游標測距原理研究及其在線性調頻脈沖雷達數據處理中的應用[D].南京:南京理工大學,2004.Liu Y F.Research on principles of Vernier ranging and its application on radar data process of linear frequency modulation radar[D].Nanjing:Nanjing University of Science and Technology,2004(in Chinese).
[5] Skolnik M I.Radar handbook[M].3rd ed.New York:McGraw-Hill,2008:58-68.
[6] Richards M A.Fundamentals of radar signal processing[M].New York:McGraw-Hill,2005:141-154.
[7] Trunk G,Brockett S.Range and velocity ambiguity resolution[C]//IEEE National Radar Conference.Piscataway,NJ:IEEE,1993:146-149.
[8] Trunk G V,Kim M W.Ambiguity resolution of multiple targets using pulse-Doppler waveforms[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(4):1130-1137.
[9] Quan Y H,Zhang L,Xing M D,et al.Velocity ambiguity resolving for moving target indication by compressed sensing[J].Electronics Letters,2011,47(22):1249-1251.
[10] 張玉璽,孫進平,張冰塵,等.基于壓縮感知理論的多普勒解模糊處理[J].電子與信息學報,2011,33(9):2103-2107.Zhang Y X,Sun J P,Zhang B C,et al.Doppler ambiguity resolution based on compressive sensing theory[J].Journal of Electronics and Information Technology,2011,33(9):2103-2107(in Chinese).
[11] Donoho D L.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[12] 王德純,丁家會,程望東.精密跟蹤測量雷達技術[M].北京:電子工業出版社,2006:31-32.Wang D C,Ding J H,Cheng W D.Technologies of precision tracking radar[M].Beijing:Electronic Industry Press,2006:31-32(in Chinese).
[13] Julier S J,Uhlmann J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[14] 周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991:138-140.Zhou H R,Jing Z L,Wang P D.Tracking of maneuvering targets[M].Beijing:National Defence Industry Press,1991:138-140(in Chinese).
[15] 郭軍海.彈道測量數據融合技術[M].北京:國防工業出版社,2012:140-142.Guo J H.Missile trajectory measurement and data fusion technology[M].Beijing:National Defence Industry Press,2012:140-142(in Chinese).
[16] Li X R,Jilkov V P.A survey of maneuvering target trackingpart I:dynamic models[J].IEEE Transactions on Aerospace and Electronic System,2003,39(4):1333-1351.
[17] Li X R,Jilkov V P.A survey of maneuvering target trackingpart II:motion models of ballistic and space targets[J].IEEE Transactions on Aerospaceand ElectronicSystem,2010,39(4):96-114.
[18] 陳浩,郭軍海,齊巍.基于經驗小波變換的目標加速度估計算法[J].北京航空航天大學學報,2015,41(1):154-159.Chen H,Guo J H,Qi W.Estimation of target’s acceleration based on empirical wavelet transform[J].Journal of Beijing University of Aeronautics and Astronautics,2015,41(1):154-159(in Chinese).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
