基于神經(jīng)網(wǎng)絡(luò)的機(jī)械式停車(chē)設(shè)備設(shè)計(jì)分析
2015-12-17 05:55:03潘曉光
中國(guó)特種設(shè)備安全 2015年10期
潘曉光
(桂林市特種設(shè)備檢驗(yàn)所 桂林 541004)
基于神經(jīng)網(wǎng)絡(luò)的機(jī)械式停車(chē)設(shè)備設(shè)計(jì)分析
潘曉光
(桂林市特種設(shè)備檢驗(yàn)所 桂林 541004)
機(jī)械式停車(chē)設(shè)備是特種設(shè)備的一種,設(shè)計(jì)環(huán)節(jié)對(duì)其安全性起到至關(guān)重要的作用。而機(jī)械式停車(chē)設(shè)備具有復(fù)雜的鋼結(jié)構(gòu)系統(tǒng),傳統(tǒng)的設(shè)計(jì)方法效率不高。因此,需要一種新的設(shè)計(jì)方法提高設(shè)計(jì)準(zhǔn)確性。本文運(yùn)用神經(jīng)網(wǎng)絡(luò)強(qiáng)大的非線性映射能力實(shí)現(xiàn)映射建模,計(jì)算后再應(yīng)用先進(jìn)的優(yōu)化技術(shù),對(duì)其各構(gòu)件截面優(yōu)化,實(shí)現(xiàn)最理想的設(shè)計(jì)結(jié)果并通過(guò)實(shí)例分析驗(yàn)證了方法的有效性。
機(jī)械式停車(chē)設(shè)備 映射模型 神經(jīng)網(wǎng)絡(luò) 優(yōu)化設(shè)計(jì)
目前,國(guó)內(nèi)機(jī)械式停車(chē)設(shè)備的需求量成幾何級(jí)數(shù)的增長(zhǎng),機(jī)械式停車(chē)設(shè)備列為特種設(shè)備,國(guó)家對(duì)其安全性的要求顯而易見(jiàn),而它的鋼結(jié)構(gòu)系統(tǒng)是整個(gè)設(shè)備安全的保證[1]。現(xiàn)在各企業(yè)常用設(shè)計(jì)方法是運(yùn)用有限元軟件建立設(shè)備三維模型,分析計(jì)算最大應(yīng)力值,再與所用材料的許用應(yīng)力比較得出結(jié)果,雖然計(jì)算結(jié)果相對(duì)準(zhǔn)確,但本質(zhì)上是試湊和迭代的過(guò)程,參數(shù)眾多,工作量巨大,效率也比較低。而運(yùn)用力學(xué)原理建立簡(jiǎn)化的理論數(shù)學(xué)模型的傳統(tǒng)計(jì)算方法,雖結(jié)構(gòu)簡(jiǎn)單,計(jì)算工作量小,但與設(shè)備的實(shí)際結(jié)構(gòu)有較大差異,計(jì)算結(jié)果精度達(dá)不到要求。本文運(yùn)用人工神經(jīng)網(wǎng)絡(luò)技術(shù)[2]實(shí)現(xiàn)映射建模的設(shè)計(jì)方法能夠解決上述兩種方法的不足,既能簡(jiǎn)化計(jì)算過(guò)程又能得到精確結(jié)果,是對(duì)機(jī)械式停車(chē)設(shè)備設(shè)計(jì)方法的創(chuàng)新和突破。本市某企業(yè)運(yùn)用映射建模的設(shè)計(jì)方法制造了一臺(tái)6層機(jī)械式停車(chē)設(shè)備,該設(shè)備運(yùn)行情況良好,通過(guò)了各項(xiàng)檢測(cè)。
1 設(shè)計(jì)思路與策略
機(jī)械式停車(chē)設(shè)備的鋼結(jié)構(gòu)受力復(fù)雜,力學(xué)模型為高次超靜定結(jié)構(gòu),各構(gòu)件應(yīng)力難以計(jì)算。根據(jù)機(jī)械式停車(chē)設(shè)備實(shí)際的結(jié)構(gòu)特點(diǎn),分割成幾個(gè)“層模塊”,以層為單元建立簡(jiǎn)模型,運(yùn)用結(jié)構(gòu)力學(xué)位移法建立各梁元的剛度方程,解該方程,得出簡(jiǎn)模型的全部?jī)?nèi)力。全模型的解決方案是運(yùn)用目前市場(chǎng)上成熟的有限元分析軟件建立機(jī)械式停車(chē)設(shè)備的整體數(shù)學(xué)模型并執(zhí)行數(shù)值分析,得出結(jié)論。最后,根據(jù)上述簡(jiǎn)模型和全模型的分析結(jié)果,運(yùn)用人工神經(jīng)網(wǎng)絡(luò)強(qiáng)大的非線性映射能力,實(shí)現(xiàn)機(jī)械式停車(chē)設(shè)備基于簡(jiǎn)模型與全模型的映射模型的建立,計(jì)算后,再采用離散變量的最優(yōu)化技術(shù),對(duì)其所用構(gòu)件截面進(jìn)行優(yōu)化設(shè)計(jì)[3]。
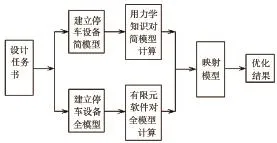
圖1 設(shè)計(jì)框圖
2 機(jī)械式停車(chē)設(shè)備映射模型建立和結(jié)果的優(yōu)化
2.1 機(jī)械式停車(chē)設(shè)備整體結(jié)構(gòu)的全模型建立
先建立設(shè)備整體的三維立體圖,導(dǎo)入有限元軟件進(jìn)行計(jì)算,軟件會(huì)自動(dòng)將圖形文件的線段轉(zhuǎn)換成節(jié)點(diǎn)和梁?jiǎn)卧瑒澐謫卧⒔o各節(jié)點(diǎn)和梁?jiǎn)卧幪?hào)。手動(dòng)設(shè)置邊界條件,加載載荷,輸入材料特性和截面特性,即可生成數(shù)據(jù)文件模型(見(jiàn)圖2),執(zhí)行軟件的后處理程序,得出計(jì)算結(jié)果。
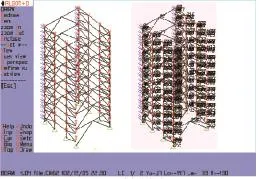
圖2 三維立體模型
2.2 機(jī)械式停車(chē)設(shè)備主體結(jié)構(gòu)的簡(jiǎn)模型建立
層結(jié)構(gòu)是機(jī)械式停車(chē)設(shè)備的基本特征,根據(jù)停車(chē)泊位與層數(shù),可以將機(jī)械式停車(chē)設(shè)備按照幾何結(jié)構(gòu)特征是否相同的條件,把結(jié)構(gòu)相同的單元?jiǎng)澐譃椴煌摹皩印保\(yùn)用模塊化的思想將復(fù)雜的鋼結(jié)構(gòu)轉(zhuǎn)化為一個(gè)科學(xué)、簡(jiǎn)單、合理又便于計(jì)算的“層模塊”簡(jiǎn)模型。圖3為機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)的簡(jiǎn)模型。
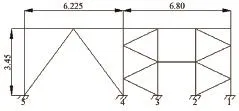
圖3 機(jī)械式停車(chē)設(shè)備力學(xué)計(jì)算簡(jiǎn)模型(正面和側(cè)面)
上述簡(jiǎn)模型是一個(gè)可以計(jì)算的超靜定結(jié)構(gòu),該結(jié)構(gòu)受彎矩、剪力、軸力和外載荷產(chǎn)生的力,可以根據(jù)力的類型分別計(jì)算結(jié)構(gòu)受力,再通過(guò)力的矢量疊加原理合成得出結(jié)果。具體方法是,首先把機(jī)械式停車(chē)設(shè)備分解為多個(gè)結(jié)構(gòu)相同的模塊,從最上層開(kāi)始分析,求解支座反力,然后把此層的支座反力作為下一層的外載荷,而下一層的載荷就是原有載荷與上一層載荷的迭加,依次類推可解出機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)所有桿件的內(nèi)力,并從中提煉出層數(shù)和內(nèi)力之間的關(guān)系,從而得出計(jì)算結(jié)果,如圖4所示。
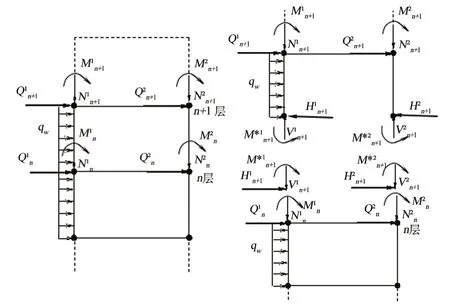
圖4 力學(xué)計(jì)算原理圖
2.3 運(yùn)用神經(jīng)網(wǎng)絡(luò)對(duì)機(jī)械式停車(chē)設(shè)備映射建模
映射模型能夠反映簡(jiǎn)模型和全模型的內(nèi)在關(guān)系。給出樣本數(shù)據(jù),通過(guò)神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)處理,得出簡(jiǎn)模型和全模型的某種內(nèi)在本質(zhì)關(guān)系。本文設(shè)計(jì)一個(gè)6層12車(chē)位的機(jī)械式停車(chē)設(shè)備,選擇BP(Back propagation Neural Network)網(wǎng)絡(luò)。機(jī)械式停車(chē)設(shè)備的主要載荷為水平風(fēng)載荷和車(chē)重及自重垂直載荷,桿件主要承受軸向力和彎矩,所以只將軸力和彎矩作為樣本數(shù)據(jù)。簡(jiǎn)模型的節(jié)點(diǎn)軸力和彎矩作為神經(jīng)網(wǎng)絡(luò)的輸入數(shù)據(jù),全模型的節(jié)點(diǎn)軸力和彎矩作為神經(jīng)網(wǎng)絡(luò)的輸出數(shù)據(jù)。同時(shí)關(guān)注的是危險(xiǎn)截面的桿件,因此采集樣本的對(duì)象應(yīng)為危險(xiǎn)截面的桿件或位置特殊的桿件,見(jiàn)圖5(桿件標(biāo)號(hào)同全模型有限元?jiǎng)澐值膯卧?hào))。
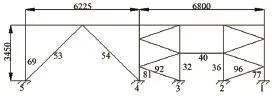
圖5 機(jī)械式停車(chē)設(shè)備結(jié)構(gòu)桿件標(biāo)號(hào)
訓(xùn)練樣本選取方形型鋼從小到大4組截面來(lái)覆蓋此20個(gè)型鋼譜,樣本總數(shù)為24個(gè)。方形型鋼其他的截面類型利用人工神經(jīng)網(wǎng)絡(luò)的內(nèi)插能力來(lái)計(jì)算。至于最佳樣本數(shù)該取多大,目前尚無(wú)成熟理論指導(dǎo) ,只能經(jīng)過(guò)多次選取確定。一般原則是在保證人工神經(jīng)網(wǎng)絡(luò)滿足所要求的精度和一定泛化能力的前提下,樣本數(shù)不宜太多[4]。表1給出了一組型鋼截面都為70mm×70mm×4mm,進(jìn)行歸一化后所得的樣本。
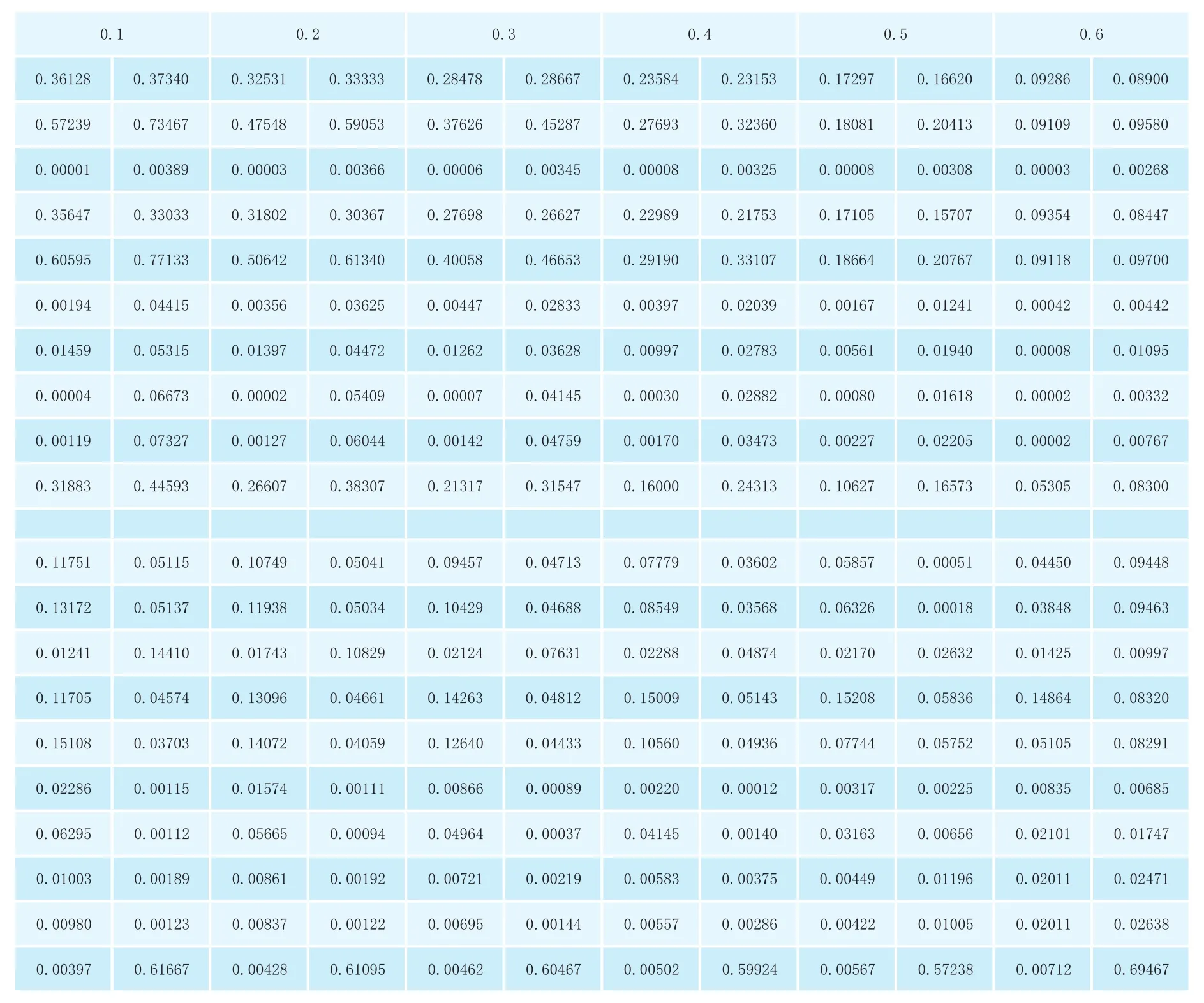
表1 截面70mm×70mm×4mm型鋼的歸一化樣本
3)第二行起,共20行。前10行是樣本對(duì)象的軸力;后10行是彎矩。
4)第二行起,前10行是軸力除以150000所得;后10行代表簡(jiǎn)模型的列是彎矩除以1050所得,代表全模型的列是彎矩除以700所得。
2.4 機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)的優(yōu)化設(shè)計(jì)
本次優(yōu)化設(shè)計(jì),設(shè)計(jì)量為機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)主要部件(立柱、橫梁、斜撐)的截面尺寸,以結(jié)構(gòu)自重最輕為指標(biāo)建立目標(biāo)函數(shù)。
●2.4.1 設(shè)計(jì)變量
根據(jù)機(jī)械式停車(chē)設(shè)備結(jié)構(gòu)形式和各構(gòu)件之間的相關(guān)聯(lián)系,確定獨(dú)立設(shè)計(jì)變量X=[x1,x2,x3]T,其中x1為立柱截面積;x2為橫梁截面積;x3為斜撐截面積。這3個(gè)獨(dú)立變量反映了機(jī)械式停車(chē)設(shè)備的結(jié)構(gòu)狀態(tài),決定了設(shè)備的總體質(zhì)量。
●2.4.2 目標(biāo)函數(shù)
按照鋼結(jié)構(gòu)優(yōu)化設(shè)計(jì)的一般要求,以機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)總質(zhì)量最輕為目標(biāo)函數(shù)。

式中:fx——某一種截面桿件的質(zhì)量;
A——桿件截面面積;
L——桿件長(zhǎng)度;
ρ——材料密度。
●2.4.3 約束條件
在機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)設(shè)計(jì)中,當(dāng)設(shè)計(jì)變量(桿件截面面積)變化時(shí),桿件的內(nèi)力和截面特性參數(shù)隨之變化,此兩者的變化決定著桿件強(qiáng)度應(yīng)力的變化,而強(qiáng)度是機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)設(shè)計(jì)的一個(gè)關(guān)鍵控制參數(shù),所以可以用強(qiáng)度應(yīng)力作為優(yōu)化設(shè)計(jì)的約束函數(shù),使設(shè)計(jì)變量的變化在強(qiáng)度的許用應(yīng)力范圍內(nèi)。為了將所有約束條件的值都化為同一數(shù)量級(jí),約束條件采用式(2)表示:

式(2)中Y為計(jì)算值、[Y]為許用值。
當(dāng)材料取為Q235時(shí),[Y]=235/1.33=176MPa。
3 工程實(shí)例
3.1 原始參數(shù)(見(jiàn)表2)
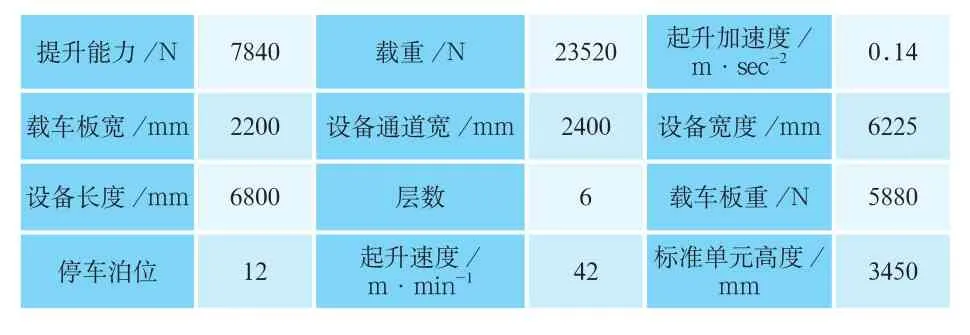
表2 原始參數(shù)表
3.2 神經(jīng)網(wǎng)絡(luò)映射
在WINDOWS XP操作系統(tǒng)下, 以VB為開(kāi)發(fā)環(huán)境,開(kāi)發(fā)了本實(shí)例計(jì)算用的結(jié)構(gòu)設(shè)計(jì)軟件。通過(guò)本軟件建立機(jī)械式停車(chē)設(shè)備簡(jiǎn)模型計(jì)算結(jié)果和全模型計(jì)算結(jié)果的樣本,生成樣本文件CK.OUT,用神經(jīng)網(wǎng)絡(luò)進(jìn)行學(xué)習(xí)訓(xùn)練,找到兩者的隱式關(guān)系,建立起映射模型。利用映射模型,用簡(jiǎn)模型的計(jì)算數(shù)據(jù)求得全模型的計(jì)算結(jié)果。計(jì)算結(jié)果的比較參見(jiàn)圖6(由于篇幅所限只給出一層的比較圖)。看圖可以得出結(jié)論:借助于所建立的映射模型,可以得到全模型的相應(yīng)計(jì)算結(jié)果的較高精度逼近。
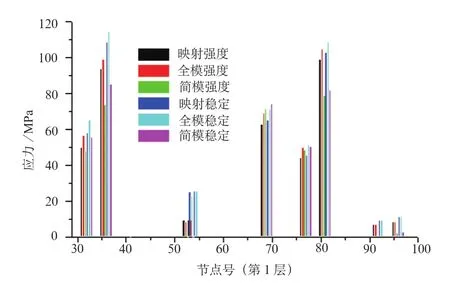
圖6 簡(jiǎn)模型、全模型和用神經(jīng)網(wǎng)絡(luò)映射計(jì)算結(jié)果的比較
3.3 優(yōu)化設(shè)計(jì)
優(yōu)化設(shè)計(jì)結(jié)果如圖7所示。優(yōu)化結(jié)果和原設(shè)計(jì)比較見(jiàn)表3。
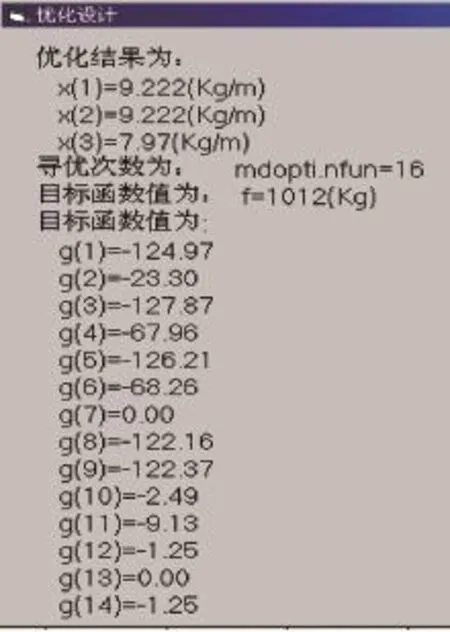
圖7 優(yōu)化結(jié)果界面
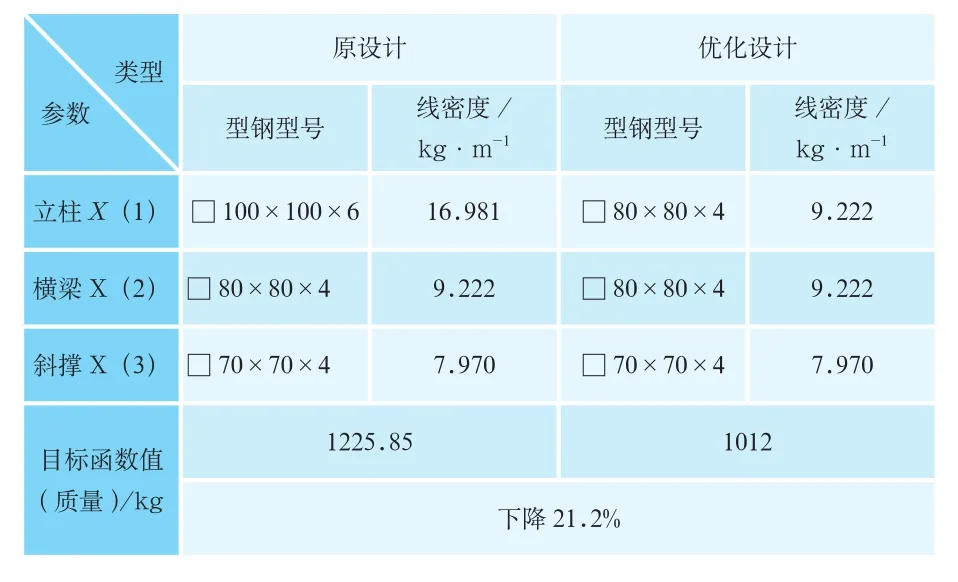
表3 機(jī)械式停車(chē)設(shè)備原設(shè)計(jì)和優(yōu)化設(shè)計(jì)比較表
3.4 結(jié)果分析
●3.4.1 有限元強(qiáng)度校核
目前有限元軟件的計(jì)算結(jié)果是能得到認(rèn)可的。在此運(yùn)用有限元軟件對(duì)設(shè)計(jì)計(jì)算結(jié)果進(jìn)行驗(yàn)證,圖8顯示了各構(gòu)件的應(yīng)力值,最大應(yīng)力為98.3195MPa,小于許用應(yīng)力值156.7MPa。可見(jiàn),設(shè)計(jì)結(jié)果是可靠的。
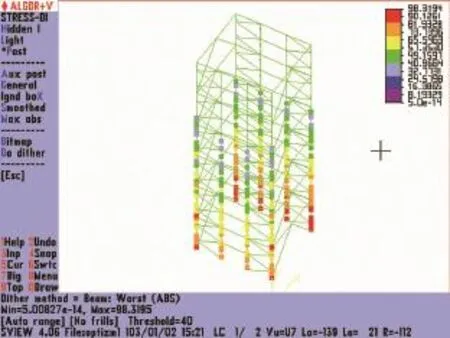
圖8 應(yīng)力絕對(duì)值顯示
●3.4.2 剛度校核
機(jī)械式停車(chē)設(shè)備映射模型位移計(jì)算樣本數(shù)據(jù)見(jiàn)表4。
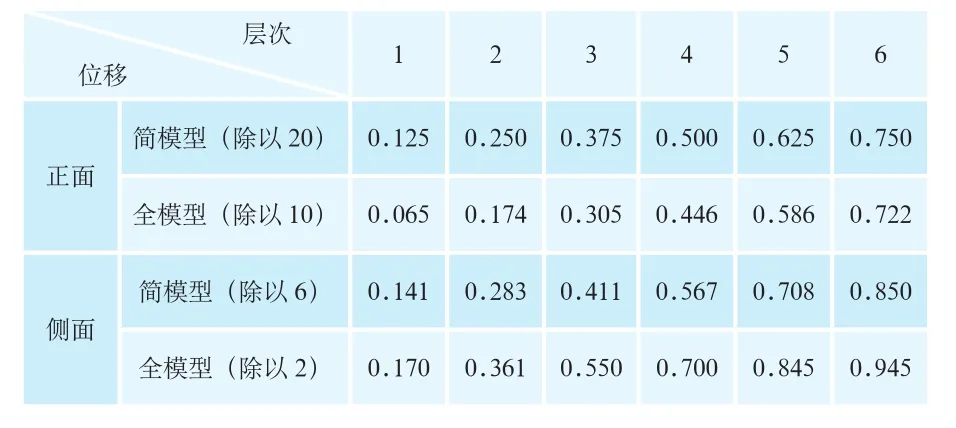
表4 立體車(chē)庫(kù)映射模型位移歸一化樣本
機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)的(最高點(diǎn))最大位移,運(yùn)用位移法得出下列結(jié)論:

映射后位移為:

采用有限元計(jì)算得:

由此可知?jiǎng)偠葷M足設(shè)計(jì)要求。
4 結(jié)束語(yǔ)
運(yùn)用神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)訓(xùn)練基于簡(jiǎn)模型和全模型計(jì)算結(jié)果的數(shù)據(jù)樣本,找到兩種模型之間的內(nèi)在關(guān)系,建立機(jī)械式停車(chē)設(shè)備的映射模型,可以計(jì)算出接近于機(jī)械式停車(chē)設(shè)備鋼結(jié)構(gòu)實(shí)際的真實(shí)內(nèi)力,大大提高了設(shè)計(jì)效率,減少了計(jì)算的工作量,同時(shí)具有相當(dāng)高的精度。
綜上可見(jiàn),本文的設(shè)計(jì)方法具有高效、失真小的特點(diǎn),并具有一定的開(kāi)創(chuàng)性和新穎性。
[1] 王金諾.起重運(yùn)輸機(jī)金屬結(jié)構(gòu)[M].北京:中國(guó)鐵道出版社,1984.
[2] 王士同.神經(jīng)模糊系統(tǒng)及其應(yīng)用[M].北京:北京航空航天大學(xué)出版社,1998.
[3] 陳立周.工程離散變量?jī)?yōu)化設(shè)計(jì)方法——原理與應(yīng)用[M].北京:機(jī)械工業(yè)出版社,1989.
[4] 張學(xué)良.機(jī)械結(jié)合面動(dòng)態(tài)特性及應(yīng)用[M].北京:中國(guó)科學(xué)技術(shù)出版社,2002.
[5] 王偉雄,王新華,劉金,等.有限元技術(shù)在結(jié)構(gòu)強(qiáng)度、穩(wěn)定性和疲勞分析中的應(yīng)用[J].中國(guó)特種設(shè)備安全,2013,29(02):1-3.
[6] 張凱,王健,畢曉恒.基于ANSYS的橋機(jī)金屬結(jié)構(gòu)校核[J].中國(guó)特種設(shè)備安全,2014,30(04):10-12.
[7] 尤毅聰.基于人工神經(jīng)網(wǎng)絡(luò)的長(zhǎng)周期儲(chǔ)存式壓力容器安全評(píng)價(jià)研究[J].中國(guó)特種設(shè)備安全,2014,30(11):38-43.
[8] 章玉婷,楊劍鋒.基于BP神經(jīng)網(wǎng)絡(luò)的輸油管道腐蝕速率預(yù)測(cè)[J].中國(guó)特種設(shè)備安全,2013,29(09):4-7.
Design Analysis of Mechanical Parking Equipment Based on Nerve Network
Pan Xiaoguang
(Guilin Special Equipment Inspection Institue Guilin 541004)
As a kind of special equipment, the design of mechanical parking device is an important process to its security. Because of the complicated steel structure system of mechanical parking device, the traditional design method is unsuitable with low efficiency, and a new design method with higher design accuracy is needed. Using the nonlinear mapping capability of artificial nerve net, the mapping model is built. Each component section is optimized after calculation. Finally, validity of the new method can be evaluated by some examples.
Mechanical parking equipment Mapping model Nerve net Optimum design
X941
B
1673-257X(2015)10-0030-05
10.3969/j.issn.1673-257X.2015.10.007
潘曉光(1980~),男,碩士,主任,工程師,從事起重機(jī)械的檢驗(yàn)及研究工作。
2015-05-25 )
猜你喜歡
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:10:10
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:08:18
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
山東冶金(2022年1期)2022-04-19 13:40:48
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18