基于Petri網(wǎng)的終端區(qū)沖突避免方法研究*
2015-12-17 03:59:11陳平任民
艦船電子工程 2015年3期
關(guān)鍵詞:模型
陳 平 任 民
(1.武漢數(shù)字工程研究所 武漢 430205)(2.海軍指揮學(xué)院 南京 210016)
?
基于Petri網(wǎng)的終端區(qū)沖突避免方法研究*
陳 平1任 民2
(1.武漢數(shù)字工程研究所 武漢 430205)(2.海軍指揮學(xué)院 南京 210016)
終端區(qū)空域結(jié)構(gòu)復(fù)雜,航空器飛行架次過(guò)多,是飛行事故高發(fā)區(qū),針對(duì)該問(wèn)題,提出一種基于Petri網(wǎng)的終端區(qū)沖突避免方法。首先分析終端區(qū)空域運(yùn)行結(jié)構(gòu),利用Petri網(wǎng)建立終端區(qū)空域運(yùn)行模型,并根據(jù)終端區(qū)空域管制規(guī)則,建立其約束模型。然后綜合約束模型,利用庫(kù)所不變量方法建立終端區(qū)空域控制策略。最后針對(duì)控制策略進(jìn)行案例分析,結(jié)果表明,此方法能夠有效解決終端區(qū)空域運(yùn)行安全問(wèn)題,減輕管制員負(fù)荷。
終端區(qū); 沖突; Petri網(wǎng); 控制策略
Class Number TP393
1 引言
隨著航空事業(yè)的發(fā)展,飛行架次日益增多,終端空域航線日趨密集,必須對(duì)終端空域運(yùn)行施加控制,否則極易產(chǎn)生飛行沖突事故,嚴(yán)重可能導(dǎo)致撞機(jī)等惡性事件。為解決這一難題,國(guó)內(nèi)外已有一些專家學(xué)者對(duì)相關(guān)問(wèn)題進(jìn)行了研究。Tang等通過(guò)利用混雜理論建立了航空器飛行全過(guò)程剖面,對(duì)航空器4D軌跡進(jìn)行預(yù)測(cè),并重點(diǎn)對(duì)可能產(chǎn)生的飛行沖突進(jìn)行了分析,設(shè)計(jì)了相關(guān)控制策略,但其未針對(duì)終端區(qū)空域飛行沖突防御進(jìn)行研究[1]。Harry等通過(guò)實(shí)時(shí)監(jiān)控空域中航空器飛行軌跡,利用動(dòng)力學(xué)模型對(duì)航空器飛行航跡進(jìn)行短期預(yù)測(cè),并對(duì)可能產(chǎn)生的飛行沖突進(jìn)行提前調(diào)配,但未能對(duì)航母進(jìn)近管制空域沖突避免進(jìn)行研究[2]。張眾等通過(guò)結(jié)合進(jìn)港排序方法得出終端區(qū)沖突解脫策略,解決了終端區(qū)飛行沖突調(diào)配問(wèn)題[3]。李忠誠(chéng)等研究了終端區(qū)飛機(jī)進(jìn)近過(guò)程中排序和沖突解決的調(diào)度算法,使到達(dá)飛機(jī)流能夠快速有序地進(jìn)入機(jī)場(chǎng)著陸[4];秦瑛利用離散事件系統(tǒng)理論對(duì)機(jī)場(chǎng)終端區(qū)作業(yè)流程進(jìn)行了建模[5]。文獻(xiàn)[3~5]研究重點(diǎn)在終端區(qū)安全前提下進(jìn)行航班排序或?qū)σ呀?jīng)產(chǎn)生的沖突進(jìn)行調(diào)配,并未研究如何防止航空器飛行產(chǎn)生沖突。
綜上所述,以往文獻(xiàn)更多集中在飛行沖突發(fā)生前的預(yù)警和沖突發(fā)生后的調(diào)配,而未針對(duì)如何防止沖突發(fā)生進(jìn)行過(guò)多研究,本文擬利用Petri網(wǎng)對(duì)終端空域運(yùn)行結(jié)構(gòu)進(jìn)行建模,分析出航空器在終端空域運(yùn)行特點(diǎn),并根據(jù)管制規(guī)則對(duì)航空器運(yùn)行施加約束,生成航空器安全運(yùn)行策略,實(shí)現(xiàn)終端空域沖突防御。
2 終端區(qū)運(yùn)行模型
為不失一般性,本文以典型終端區(qū)結(jié)構(gòu)為研究對(duì)象,如圖1所示。整個(gè)終端區(qū)有若干等待區(qū),航空器在該區(qū)域等待進(jìn)入進(jìn)近,利用離散化思想,可將整個(gè)終端區(qū)航段分為若干航段,利用Petri網(wǎng)對(duì)其進(jìn)行建模。
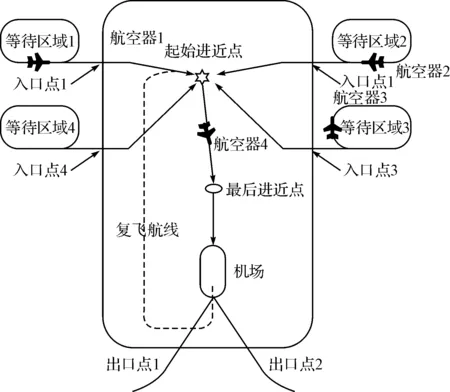
圖1 終端空域運(yùn)行結(jié)構(gòu)圖
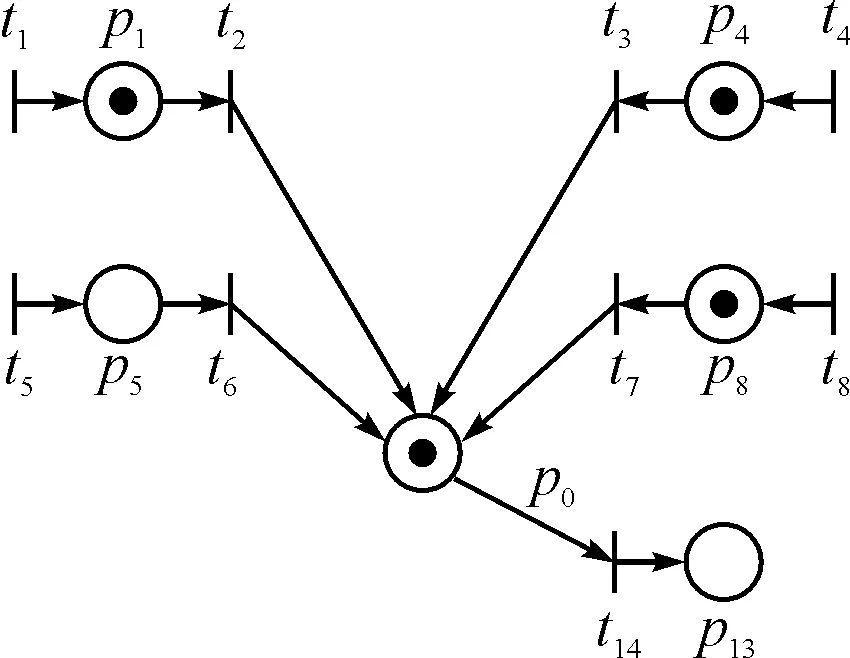
圖2 終端空域運(yùn)行簡(jiǎn)化模型N
定義1 終端區(qū)運(yùn)行模型。終端區(qū)運(yùn)行Petri網(wǎng)模型定義為N=(P,T,Pre,Post,m),其中:P為庫(kù)所集合,P={p1,p2,…,pi…};T為變遷集合,變遷,T={t1,t2,…,ti…};Pre表示P×T的流關(guān)系,其權(quán)重wpre=1;Post表示T×P的流關(guān)系,其權(quán)重wpost=1;m為狀態(tài)標(biāo)識(shí),可反映終端區(qū)內(nèi)航空器的分布態(tài)勢(shì)。
將等待區(qū)1、2、3、4分別映射為庫(kù)所p1,p4,p5,p8,對(duì)應(yīng)的進(jìn)近航段分別映射為p2,p3,p6,p7,p9,p10,復(fù)飛航段映射為p11,跑道映射為p12,p13表示航空器已經(jīng)到達(dá)滑行道位置。
通過(guò)對(duì)終端空域結(jié)構(gòu)和航空器進(jìn)近特點(diǎn)進(jìn)行分析,庫(kù)所p2,p3,p6,p7,p9,p10,p11,p12對(duì)應(yīng)的航段為進(jìn)近關(guān)鍵區(qū)域,要求任意時(shí)刻只能有一架航空器進(jìn)行著陸,故可以對(duì)航空器終端區(qū)運(yùn)行模型進(jìn)行簡(jiǎn)化,以庫(kù)所p0表示庫(kù)所p2,p3,p6,p7,p9,p10,p11,p12映射的區(qū)域,如圖3所示為航空器終端區(qū)運(yùn)行簡(jiǎn)化模型N。
3 終端區(qū)運(yùn)行約束模型
根據(jù)航空器在終端區(qū)的安全飛行要求和對(duì)應(yīng)的管制規(guī)則,可建立終端區(qū)運(yùn)行約束模型以保證航空器在終端區(qū)飛行安全可靠。
3.1 線性不等式約束模型
根據(jù)管制規(guī)則禁止行為可被描述為網(wǎng)標(biāo)識(shí)的加權(quán)和不超過(guò)某一上限,故可利用線性不等式建立其約束模型,可表示為l·m≤b,其中,l是標(biāo)識(shí)加權(quán)矩陣;m為標(biāo)識(shí)向量;向量b為標(biāo)識(shí)加權(quán)和的常量。在終端區(qū)主要有以下約束:
約束1:為保證航空器降落安全,要求同一時(shí)刻進(jìn)近航段內(nèi)只有一架飛機(jī),其對(duì)應(yīng)的控制規(guī)范可以建立為
m(p0)≤1
(1)
約束2:為保證航空器在等待區(qū)域內(nèi)安全,要求任一等待區(qū)域內(nèi)同時(shí)最多只能有n架航空器:
(2)
3.2 優(yōu)先等級(jí)約束模型
根據(jù)線性不等式約束模型可防止終端區(qū)運(yùn)行進(jìn)入禁止?fàn)顟B(tài)。但在進(jìn)近區(qū)域航段清空,允許其他航空器降落時(shí),存在兩架或多架航空器同時(shí)請(qǐng)求進(jìn)入該區(qū)域的狀況,為解決這類問(wèn)題,提出一種基于優(yōu)先級(jí)的控制策略。
針對(duì)活動(dòng)運(yùn)行模型N,對(duì)每個(gè)變遷t∈T都賦予一個(gè)正整數(shù)pr(t)。對(duì)于ti,tj∈T,如果pr(ti)>pr(tj),則變遷ti比變遷tj有優(yōu)先發(fā)生權(quán)。
約束3:根據(jù)管制要求,等待區(qū)之間存在優(yōu)先級(jí)關(guān)系,可對(duì)運(yùn)行模型添加約束:
pr(t2)>pr(t3)>pr(t6)>pr(t7)
(3)
4 標(biāo)識(shí)運(yùn)行控制策略
針對(duì)線性不等式約束模型,本文采用一種庫(kù)所不變量的方法設(shè)計(jì)控制器[7],該方法的思想是把線性不等式約束中的庫(kù)所和外加的控制庫(kù)所作為閉環(huán)控制系統(tǒng)期望的庫(kù)所被某一不變量覆蓋。其方法具體如下:
針對(duì)每個(gè)約束不等式增加一個(gè)控制庫(kù)所pc,其初始標(biāo)識(shí)由被控子網(wǎng)的初始標(biāo)識(shí)確定:
m0(pc)=b-lm
(4)
控制器庫(kù)所pc和約束變遷的關(guān)聯(lián)矩陣Dc可以通過(guò)被控對(duì)象的關(guān)聯(lián)矩陣D確定:
Dc=-lD
(5)
例1 以約束1模型為例,采用庫(kù)所不變量方法對(duì)運(yùn)行模型進(jìn)行控制器綜合。
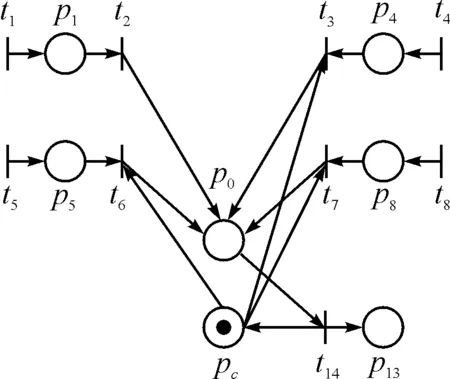
圖3 庫(kù)所不變量方法控制器綜合
步驟1:確定約束庫(kù)所集Ps、約束變遷集Ts和關(guān)聯(lián)矩陣D。
步驟2:添加控制庫(kù)所pc,根據(jù)式(4)可推出控制庫(kù)所初始標(biāo)識(shí)為:m0(pc)=1。
步驟3:確定控制庫(kù)所關(guān)聯(lián)矩陣Dc,根據(jù)式(5)可推出Dc為:Dc=[1 1 1 1 -1]。
步驟4:基于關(guān)聯(lián)矩陣Dc,對(duì)運(yùn)行模型進(jìn)行控制器綜合,如圖3所示。
5 控制算法及案例分析
為防止終端區(qū)內(nèi)沖突事件發(fā)生,本文提出一種基于變遷狀態(tài)決策控制指令的方法,通過(guò)將決策出航空器運(yùn)行控制指令發(fā)送至航空器,飛行員可根據(jù)控制指令操作,以防止終端區(qū)入侵事件。
定義1 航空器運(yùn)行控制指令集對(duì)終端區(qū)運(yùn)行模型,定義航空器運(yùn)行控制指令集為N={fly,wait},其中fly為航空器許可進(jìn)入下一階段指令,wait為航空器等待指令。
根據(jù)航空器運(yùn)行控制指令決策方法,可定義如下映射:

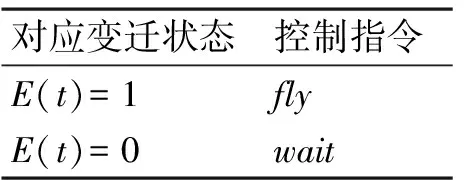
表1 航空器運(yùn)行控制指令決策模型
例2為驗(yàn)證控制方法可行度,以圖1所示案例為例。
步驟1:建立整個(gè)終端區(qū)運(yùn)行模型N。
步驟2:根據(jù)終端區(qū)運(yùn)行模型N,針對(duì)約束1,2,和3構(gòu)建其約束模型,建立含控制器的終端區(qū)運(yùn)行模型。
步驟3:通過(guò)雷達(dá)等信息獲取途徑,確定當(dāng)前場(chǎng)面的標(biāo)識(shí)狀態(tài)m。可確定例題當(dāng)前標(biāo)識(shí)為:m(p1)=1,m(p4)=1,m(p8)=1,m(p0)=1,其余皆為0。
步驟4:基于標(biāo)識(shí)信息m,根據(jù)變遷的使能規(guī)則,可確定當(dāng)前各個(gè)變遷的使能狀態(tài)為1或0。可確定當(dāng)前變遷為:E(t2)=0,E(t3)=0,E(t6)=0,E(t7)=0,E(t14)=1。
步驟5:根據(jù)當(dāng)前各個(gè)變遷狀態(tài)和航空器運(yùn)行控制指令映射規(guī)則,確定航空器運(yùn)行控制指令。可知當(dāng)前狀態(tài)下航空器1、2、3接收到的控制指令為wait,故航空器1、2、3依然在空中等待,而航空器4接收到的控制指令為fly,則其繼續(xù)飛行。
步驟6:回到步驟3,待航空器4飛行降落到滑行道以后,通過(guò)雷達(dá)等信息獲取途徑,當(dāng)前場(chǎng)面的標(biāo)識(shí)狀態(tài)m1。可確定:m1(p1)=1,m1(p4)=1,m1(p8)=1,m1(p13)=1,其余皆為0。
步驟7:基于標(biāo)識(shí)信息m1,根據(jù)變遷的使能規(guī)則,可確定當(dāng)前各個(gè)變遷的使能狀態(tài)為1或0。可確定當(dāng)前變遷為:E(t2)=1,E(t3)=0,E(t6)=0,E(t7)=0。
步驟8:根據(jù)當(dāng)前各個(gè)變遷狀態(tài)和航空器運(yùn)行控制指令映射規(guī)則,確定航空器運(yùn)行控制指令。可知當(dāng)前狀態(tài)下航空器1接收到的控制指令為fly,航空器2、3接收到的控制指令為wait。
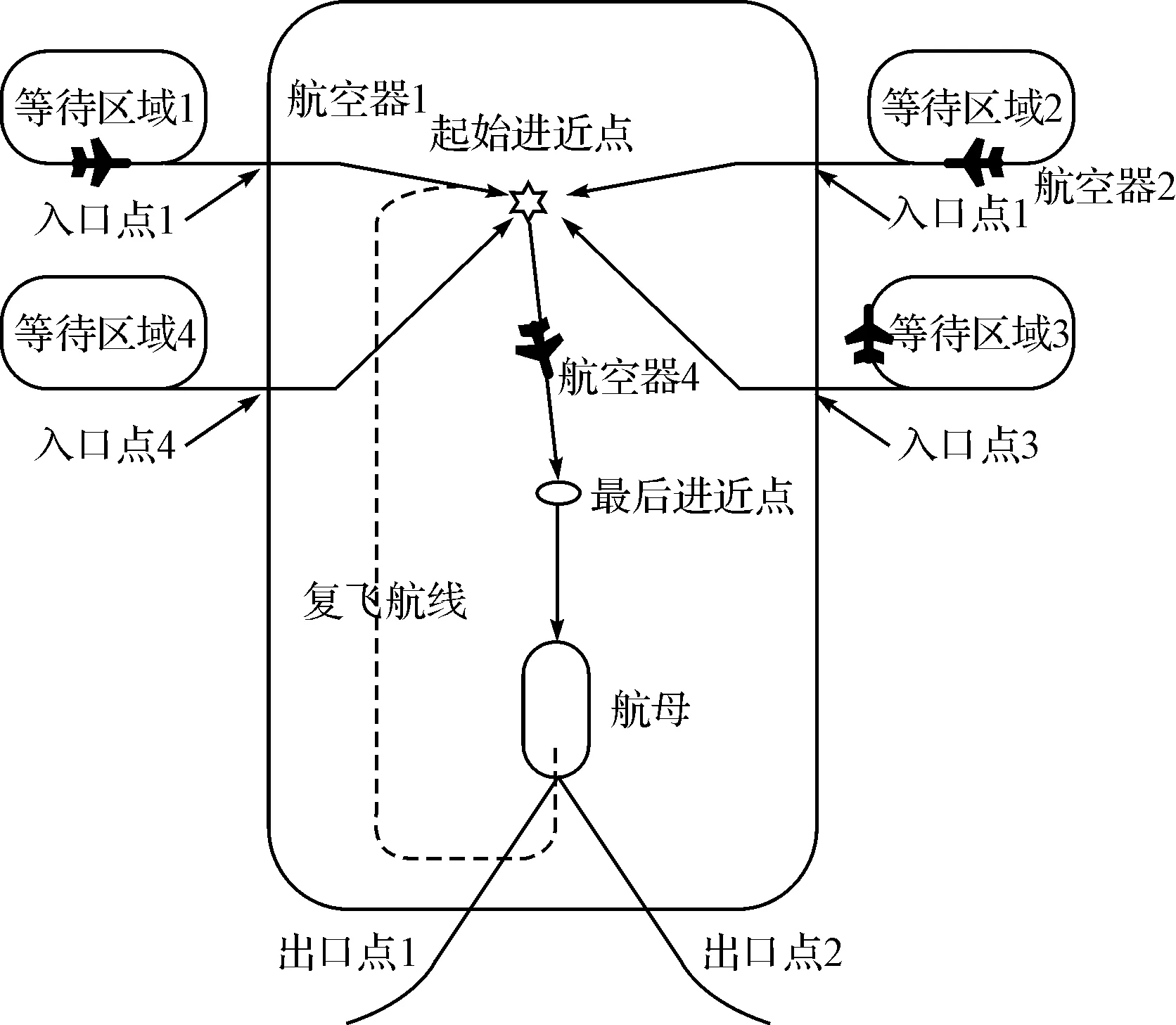
圖4 航空器1開(kāi)始進(jìn)近著陸示意圖
步驟9:回到步驟3,航空器1飛行進(jìn)入進(jìn)近航段,開(kāi)始下滑進(jìn)入跑道,而航空器2、3依然等待,如圖4所示。通過(guò)雷達(dá)等信息獲取途徑,確定當(dāng)前標(biāo)識(shí)狀態(tài)為m2。可知:m2(p1)=0,m2(p4)=1,m2(p8)=1,m2(p13)=1,m(p0)=1,其余皆為0,如圖5所示。
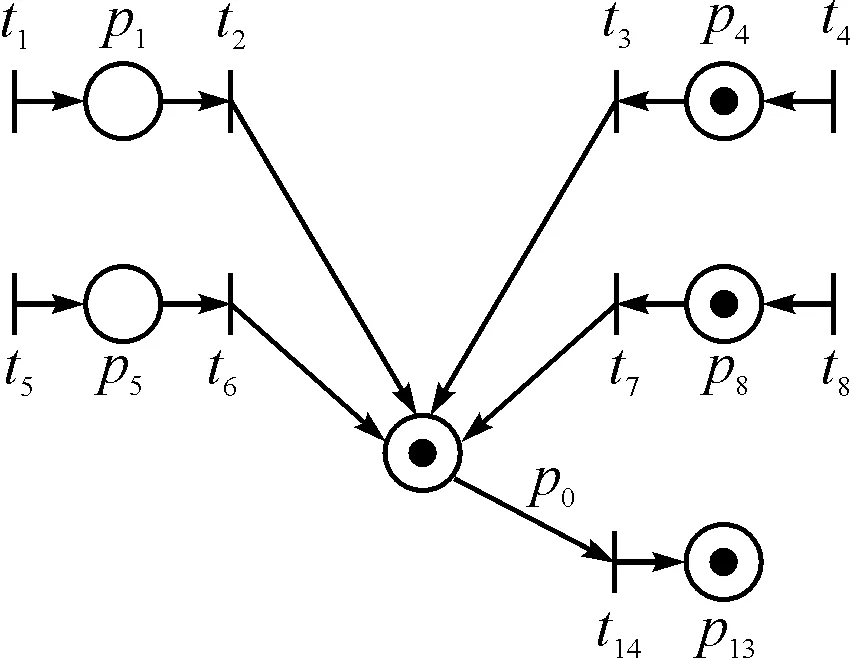
圖5 標(biāo)識(shí)狀態(tài)m2
6 結(jié)語(yǔ)
本文通過(guò)分析終端區(qū)空域運(yùn)行結(jié)構(gòu),利用Petri網(wǎng)理論建立終端區(qū)空域運(yùn)行模型,并針對(duì)終端區(qū)管制規(guī)則,建立其約束模型。然后利用庫(kù)所不變量和禁止弧方法制定終端區(qū)控制策略,通過(guò)案例分析可知,該控制策略能夠?qū)崿F(xiàn)終端區(qū)空域的安全運(yùn)行,減輕管制員工作負(fù)荷。
[1] Tang X M, Han Y X. 4D trajectory estimation for air traffic control automation system based on hybrid system theory[J]. PROMET-Traffic & Transportation,2012,24(2):91-98.
[2] Harry Swenson, Richard Barhydt, Michael Landis. Next Generation Air Transportation System Air Traffic Management Airspace Project[R]. NASA,2006:1-43.
[3] 張眾,張學(xué)軍,孫富春,等.結(jié)合進(jìn)港排序的終端區(qū)沖突解脫策略研究[J].計(jì)算機(jī)工程與應(yīng)用,2010,32:205-208.
[4] 李忠誠(chéng),徐肖豪.進(jìn)近過(guò)程中的排序和沖突解決算法研究[J].中國(guó)民航學(xué)院學(xué)報(bào),2004(3):6-10.
[5] 秦瑛.機(jī)場(chǎng)終端區(qū)作業(yè)的離散事件系統(tǒng)建模與優(yōu)化[D].天津:中國(guó)民用航空學(xué)院,2006.
[6] 韓超,王贏.一種基于改進(jìn)PSO的無(wú)人機(jī)航路規(guī)劃方法[J].艦船電子工程,2014(4):49-53.
[7] 王壽光.基于簡(jiǎn)化技術(shù)的離散事件系統(tǒng)控制器的綜合[D].杭州:浙江大學(xué),2005.
[8] 郭江龍,郭英,尹成義,等.水面艦艇編隊(duì)海上作戰(zhàn)中威脅扇面內(nèi)涵分析[J].艦船電子工程,2013(11):30-31,136.
[9] 桑亮.視覺(jué)條件對(duì)航空器著陸終端誤差影響研究[J].艦船電子工程,2014(5):144-148.
Research on Conflict Preventingmethod Based on Petri Net
CHEN Ping1REN Ming2
(1. Wuhan Digital Engineering Institute, Wuhan 430205)(2. Navy Collage of Command, Nanjing 210016)
The structure of terminal airspace which is the high incidence of accidents is complex, and aircraft flying sorties over. To solve this problem, a method is proposed to avoid the terminal area airspace conflicts based on Petri net. The operation model of terminal area airspace based on Petri nets is established according to the terminal area airspace operation structure firstly, and the constraint model of terminal area is established according to the rules of terminal area operation. Then the marking control model is transformed into the state prohibits problem to design controller, and the priority control strategy is put forward according to disable concurrency events. A simulation example demonstrates the effectiveness of the control strategy which can solve the conflict of terminal area.
terminal area, conflict, Petri net, control strategy
2014年9月13日,
2014年10月30日
陳平,男,碩士,研究方向:新一代空管自動(dòng)化系統(tǒng)。任民,男,副教授,研究方向:兵種指揮,航空兵管制運(yùn)行。
TP393
10.3969/j.issn1672-9730.2015.03.007
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
