基于Matlab的水下航行器航向自抗擾控制方法研究*
2015-12-17 04:02:34陳路偉湯華濤
艦船電子工程 2015年3期
陳路偉 湯華濤
(1.91388部隊93分隊 湛江 524000)(2.海軍工程大學機械工程系 武漢 430033)
?
基于Matlab的水下航行器航向自抗擾控制方法研究*
陳路偉1湯華濤2
(1.91388部隊93分隊 湛江 524000)(2.海軍工程大學機械工程系 武漢 430033)
水下航行器航行環(huán)境日趨復(fù)雜、傳統(tǒng)的PID控制日漸無法滿足復(fù)雜的任務(wù)需求,為此論文采用自抗擾控制算法設(shè)計水下航行器航向態(tài)控制器,以達到替換老舊的PID控制的目的。仿真結(jié)果表明,自抗擾控制器操舵平滑,控制速度快,魯棒性和環(huán)境適應(yīng)能力更好,完全能勝任水下航行器控制的要求。
水下航行器; 航向控制; 自抗擾控制器
Class Number TN95
1 引言
水下航行器的控制模型是非線性的,在水下航行器的運動過程中,模型參數(shù)會發(fā)生大范圍攝動,同時水下航行器的航行環(huán)境非常復(fù)雜,隨著現(xiàn)代海戰(zhàn)對水下航行器的操縱性等特性有更高的要求,傳統(tǒng)的PID控制方法難以勝任。針對這種情況,國內(nèi)外很多學者將非線性魯棒控制、自適應(yīng)控制、輸出反饋變結(jié)構(gòu)控制、模糊控制等現(xiàn)代控制理論與技術(shù)應(yīng)用于水下航行器的控制上,在水下航行器控制方法的研究上取得了一定的進展[1~4]。但也存在一些問題。如魯棒控制與自適應(yīng)控制對控制對象的數(shù)學模型有較高要求,變結(jié)構(gòu)控制存在高頻震顫,模糊控制在工程設(shè)計中很直觀,但是控制規(guī)則的確定和優(yōu)化比較困難等[5]。這些控制算法由于其本身的復(fù)雜性,很多還停留在理論仿真階段。自抗擾控制技術(shù)是一種不依賴被控對象精確數(shù)學模型的新型實用非線性數(shù)字控制技術(shù),有很好的環(huán)境適應(yīng)能力。它是對經(jīng)典PID控制器結(jié)構(gòu)方面的缺陷做進一步改進,利用特殊的非線性效應(yīng),結(jié)合實際的非線性工程算法,是一種自動補償對象模型的新型控制器[6]。這種估計擾動并給予相應(yīng)補償?shù)哪芰?對于解決水下航行器在運動控制中遇到的各種擾動問題具有一定的適應(yīng)性。本文擬采用自抗擾控制方法設(shè)計水下航行器航向控制的控制方法,以滿足其對日趨復(fù)雜的水下工作環(huán)境的要求。
2 水下航行器的航向控制模型
通過文獻[7]可以得到AUV空間運動的完整數(shù)學模型。本文研究航向控制問題,AUV模型的水平面運動方程如下:



(1)

假設(shè)UUV的速度穩(wěn)定于dψ,dv,dr,重心在運動坐標系的原點上,并忽略垂直面運動和橫搖運動參數(shù)的影響(即認為w,p,q為小量),以及關(guān)于v,r的二次非線性項為0,可以得到簡化后的AUV水平運動數(shù)學模型:

(2)
式中,dψ,dv,dr包括了模型線性近似時產(chǎn)生的誤差、不確定性和外界干擾。
因此,可得到UUV航向控制器設(shè)計模型:
(3)
3 自抗擾控制設(shè)計
3.1 自抗擾控制器結(jié)構(gòu)及原理
自抗擾控制器由跟蹤微分器、擴張狀態(tài)觀測器和非線性狀態(tài)誤差反饋律三部分組成[8]。各個組成部分的作用分別為:跟蹤微分器是為系統(tǒng)輸入安排過渡過程,得到光滑的輸入信號以及輸入信號的微分信號;擴張狀態(tài)觀測器是實時跟蹤系統(tǒng)狀態(tài),不僅能得到系統(tǒng)的狀態(tài)信息,還能獲得對象模型中內(nèi)擾和外擾的實時作用量。將這個實時作用量補償?shù)娇刂破髦腥?可以使原來的非線性系統(tǒng)變成線性的積分器串聯(lián)型控制系統(tǒng)。這個動態(tài)估計補償總和擾動的技術(shù)是整個自抗擾控制技術(shù)中最關(guān)鍵、最核心的技術(shù)[9]。非線性狀態(tài)誤差反饋律是把跟蹤微分器產(chǎn)生的跟蹤信號和微分信號與擴張狀態(tài)觀測器得到的系統(tǒng)的狀態(tài)估計通過非線性函數(shù)進行適當組合,作為被控對象的控制量。
3.2 自抗擾控制器算法設(shè)計
將式(3)改寫成如下方程形式:
由上式可以看出,v和r是相互耦合的,并且被控量為航向角Ψ,因此在設(shè)計自抗擾航向控制器時,忽略有關(guān)航速V的方程式,因此有:
令x1=Ψ,x2=r,y=x1,u=δr有:
則可設(shè)計擴張狀態(tài)觀測器:
其中β1,β2,β3為自抗擾控制器參數(shù)。
則自抗擾控制器為
4 仿真及分析
本文選取某533口徑電動力水下航行器在2Kn時的數(shù)學模型作為仿真研究對象,模型數(shù)據(jù)來自文獻[10]。就目前而言,PID控制律在控制工程領(lǐng)域占據(jù)著絕對主導(dǎo)地位,實際上,水下航行器航向控制器絕大部分還是采用PID。但經(jīng)典的PID由于對控制系統(tǒng)動態(tài)過程的信息利用過少,而且其信息處理的手段過于簡單,也存在著缺陷。例如存在調(diào)節(jié)時間和超調(diào)量不可調(diào)和的矛盾等。為解決經(jīng)典PID調(diào)節(jié)時間和超調(diào)量的矛盾,本文采用Matlab中的NCD工具箱對其進行優(yōu)化。本文選用經(jīng)過優(yōu)化的PID控制系統(tǒng)作為自抗擾控制系統(tǒng)的對比仿真研究對象。經(jīng)過NCD優(yōu)化過的PID控制器參數(shù)為:kp=2.2112,ki=0.04989,kd=0.6438。
利用Simulink建立仿真模型如圖1。其中han_td為跟蹤微分器離散算法,han_eso為擴張狀態(tài)觀測器離散算法,han_ctrl為非線性狀態(tài)誤差反饋律離散算法,均采用S函數(shù)編寫。
方向舵角變化范圍為-35°~+35°。在仿真時間t=30s時給定一個60°航向角階躍信號,仿真結(jié)果如圖2、圖3。圖3中,實線代表自抗擾控制算法,虛線代表PID算法。由圖2可以看出,兩種控制方法在正弦輸入情況下,均可以較好的完成位置跟蹤任務(wù);在階躍輸入情況下,PID控制也可以完成對輸入波形的跟蹤,但在輸入突變的情況下,超調(diào)較嚴重,波動較大,而自抗擾控制基本無超調(diào),波動很小,對干擾的適應(yīng)性更好。仿真結(jié)果表明自抗擾控制可以更好地適應(yīng)水下航行器的航向控制任務(wù)。
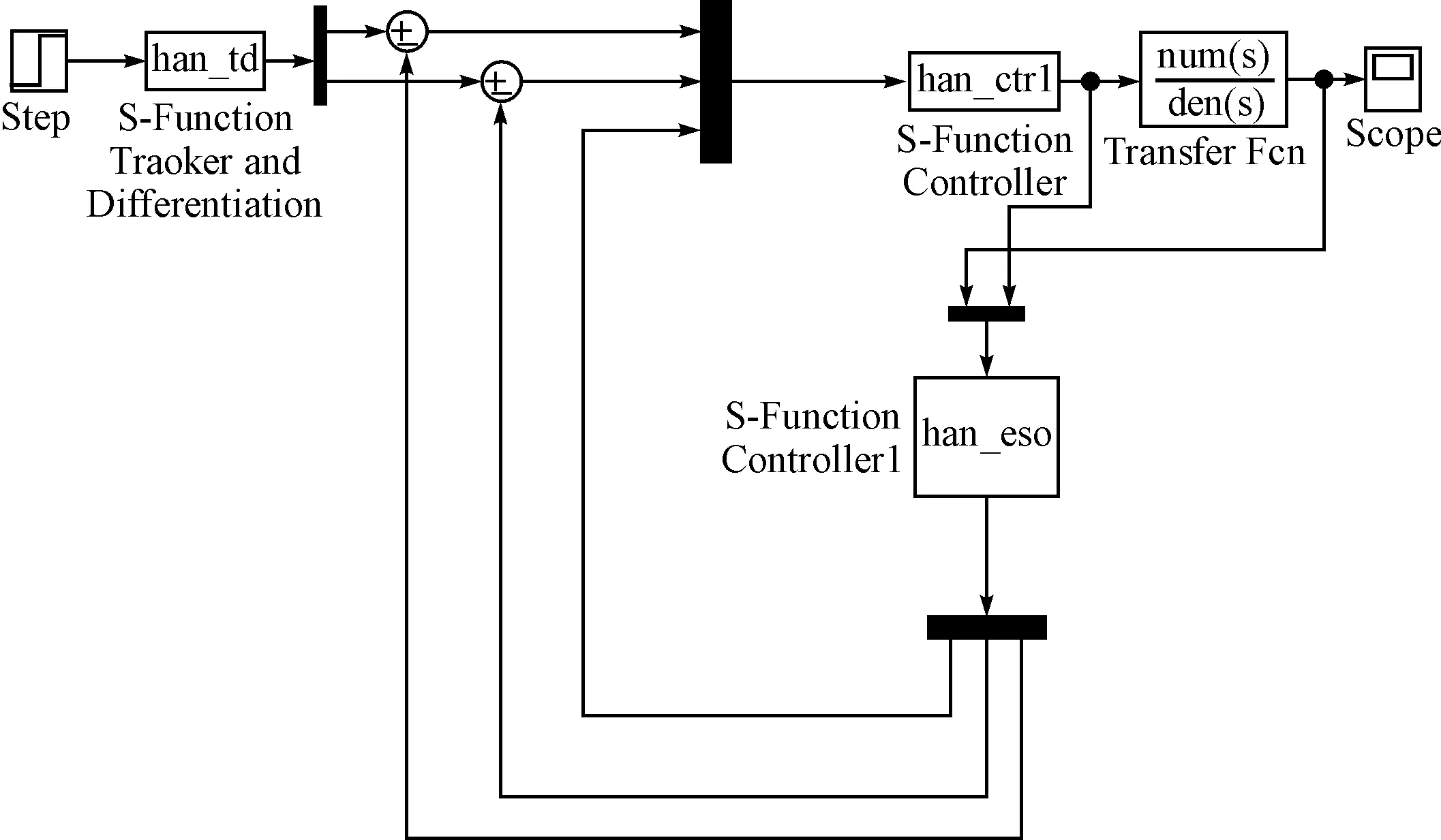
圖1 自抗擾控制仿真圖
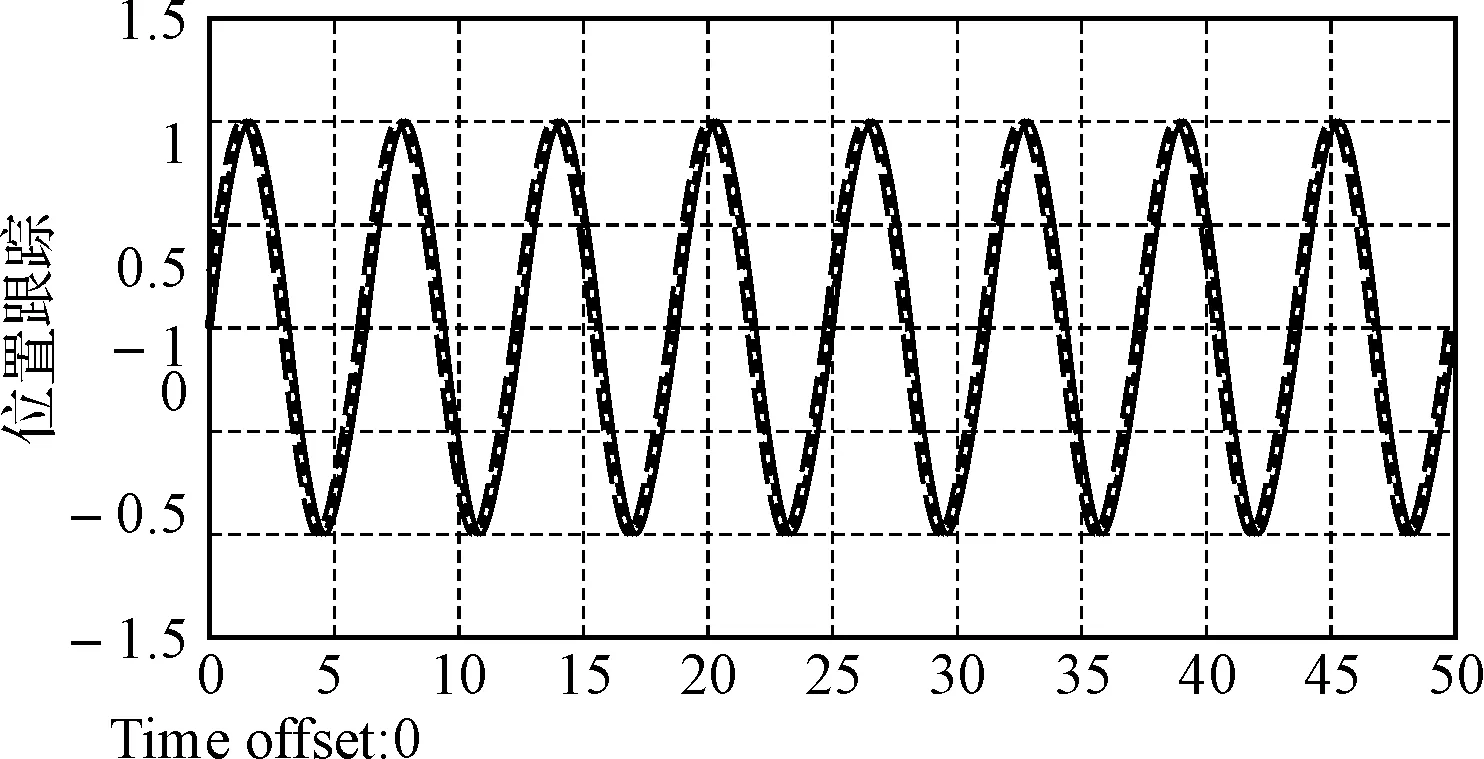
圖2 位置跟蹤結(jié)果
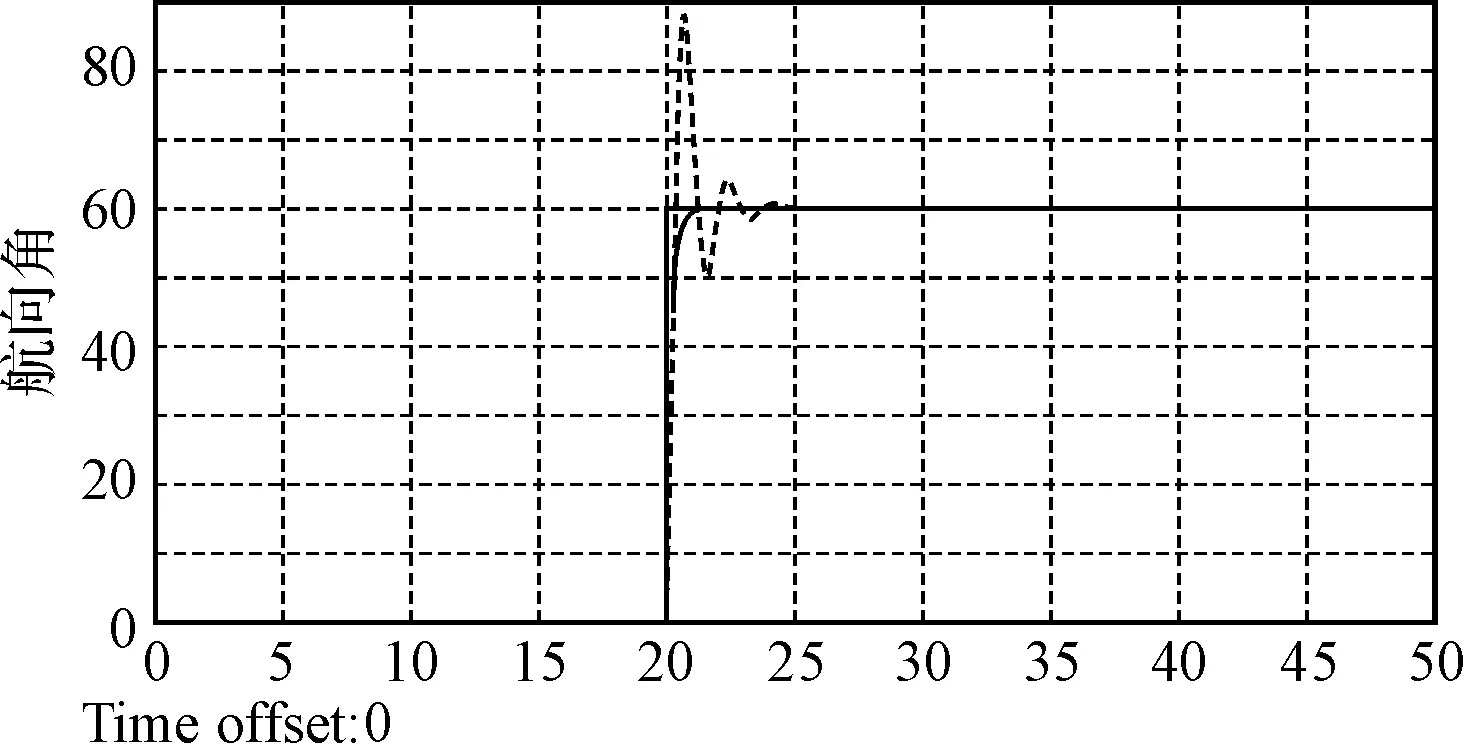
圖3 階躍仿真結(jié)果
5 結(jié)語
本文推導(dǎo)了水下航行器航向控制的數(shù)學模型,并充分考慮了舵機的特性,使被控對象與實際的水下航器動態(tài)特性更為接近。在此基礎(chǔ)上,采用自抗擾算法設(shè)計了水下航行器航向控制器,利用Matlab建立了仿真模型,并同PID控制做了對比性的仿真研究。結(jié)果表明,同PID控制相比,自抗擾控制超調(diào)小,魯棒性和環(huán)境適應(yīng)能力更好,完全能夠勝任水下航行器航向控制的要求。
[1] 劉正平,徐德民,王曉娟.水下航行體非線性H∞控制研究[J].艦船科學技術(shù),2001,22(7):56-58.
[2] 陳曄,王德石.水下航行體非線性姿態(tài)系統(tǒng)的自適應(yīng)反演控制[J].海軍工程大學學報,2008,20(3).
[3] 陳路偉,湯華濤.滑膜控制在水下航行器橫滾姿態(tài)控制中的應(yīng)用研究[J].艦船電子工程,2013,33(9):55-57.
[4] Debitetto P A. Fuzzy Logic for DepthControl of Unmanned Undersea Vehicles[J]. IEE. Oceanin Eng,1995.
[5] 陳曄,王德石,董友亮.水下航行體姿態(tài)系統(tǒng)的輸出反饋變結(jié)構(gòu)控制研究[J].兵工學報,2009,12(8):37-38.
[6] 雷仲謀,呂振鐸.非線性自抗擾控制器在航天器姿態(tài)控制系統(tǒng)中的應(yīng)用[J].航天控制,2000(4):34-39.
[7] 李天森.魚雷操縱性[M].西安:西北工業(yè)大學出版社,2005.
[8] 韓京清.自抗擾控制技術(shù)[M].北京:國防工業(yè)出版社,2008.
[9] 李海生,朱學峰.自抗擾控制器參數(shù)整定與優(yōu)化方法研究[J].控制工程,2004.
[10] 嚴衛(wèi)生.魚雷航行力學[M].西安:西北工業(yè)大學出版社,2005.
AUV Heading ADRC Controller Based on Matlab
CHEN Luwei1TANG Huatao2
(1. Unit 93, No. 91388 Troops of PLA, Zhanjiang 524000)(2. Department of Mechanical Engineering, Naval University of Engineering, Wuhan 430033)
AUV navigation environment is becoming increasingly complex, thus traditional PID control can not meet the growing demand for complex tasks. Therefore ADRC control algorithm is used to design AUV heading controllers to achieve the purpose of replacing the old PID control. Simulation results show that ADRC has steering smooth, controlled speed, better robustness and environmental adaptability, is fully capable of AUV control.
AUV, heading controller, ADRC controller
2014年9月17日,
2014年11月3日
陳路偉,男,碩士,助理工程師,研究方向:水下靶標。
TN95
10.3969/j.issn1672-9730.2015.03.013
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19
