掩體式防拖潛標探測裝置的設計與研究
2015-12-15 03:35:18徐如彥楊青軍王俊勤李家剛劉在科吳海京周楊銳任世炎
海洋科學 2015年3期
徐如彥, 沈 寧, 楊青軍, 王俊勤, 李家剛, 劉在科, 吳海京, 張 杰,周楊銳, 任世炎
(1.中國科學院海洋研究所, 山東 青島 266071; 2.中海石油(中國)有限公司研究總院, 北京 100027; 3.中海油服物探事業部工程勘察中心, 天津 300451)
隨著海洋科學研究、海洋資源開發和國防事業不斷發展的需要, 潛標系統的應用日益廣泛。如何改進潛標的測量技術和方法, 已成為廣大海洋科技工作者的共識[1-2]。
多年來, 海洋漁業、海洋運輸、海洋開發等各種海洋活動, 是影響海洋環境連續觀測與質量的最主要因素,是觀測儀器設備受到損壞的禍首之一, 又是影響海上潛標測量質量以及導致海洋觀測儀器丟失的主要根源, 特別是在淺海水域, 更是防不勝防、束手無策。
預防和解決海洋環境連續觀測的防拖問題, 是世界各國海洋科學家共同面臨的世紀難題。針對淺海區海上潛標、觀測儀器的損失與破壞, 各國海洋科學工作者進行了長期不懈的努力與探討。到目前為止還沒有一種有效可行的方法。
本研究于2012年, 在世界各國各種結構潛標探測技術的基礎上 , 完成最初樣本, 后經不斷改進和完善, 從更深層次的角度, 設計出了掩體式防拖潛標探測裝置, 該裝置是目前預防和解決防拖的一種可行方法。有望解決科學家共同面對的海洋觀測防拖疑難問題[3-4]。
1 掩體式防拖潛標探測裝置設計原理
掩體式防拖框架內可容納放置整個潛標測量系統。將儀器設備、釋放器預置到連載浮體內。首先將儀器設備的高度改造為不超過40 cm, 然后將連體潛標的總體高度設計為40 cm。875D型釋放器高度不超過50 cm; 865A型釋放器需要改造, 它的高度為65 cm, 根據需要可去除它上端7 cm高的把手, 下端的拖鉤部分, 設計為15 cm高的、一頭帶尖的防泥及保護脫鉤的鋼管, 該鋼管靠掩體的自重沉入海床以下15 cm。因此, 掩體重量視海底地質結構條件而定。該保護脫鉤的鋼管已在中國大部分海域靠自重完成入泥深度至海床下15 cm。
對儀器外型及框架整體改造后, 防拖儀器、釋放器、整體框架的高度為 40 cm, 潛標上面離海底的高度只有40 cm, 從而使潛標探測裝置起到了理想的防拖效果。
該裝置將整套集成潛標的測量系統全部密封在掩體內, 構成掩體式防拖體, 該探測裝置的浮體內可合成美國產ADCP600型與ADCP300型多譜勒剖面海流計、水位計、水溫儀、鹽度儀······等水文測量儀器。可進行淺海區剖面海流、水位、底層水溫, 鹽度等諸多水文要素的測量。
該裝置中防拖弧形架子的中間可放置儀器設備,以達到盡可能地避免和防止漁船拖網。掩體式防拖潛標探測裝置示意圖見圖1。文獻[5-6]雖然通過表面浮標實時傳輸測量數據, 但它是采用有纜浮標錨定測量方式。而本文最大的不同是無纜繩觀測, 從有纜到無纜觀測從根本上改變了測量方式與方法。
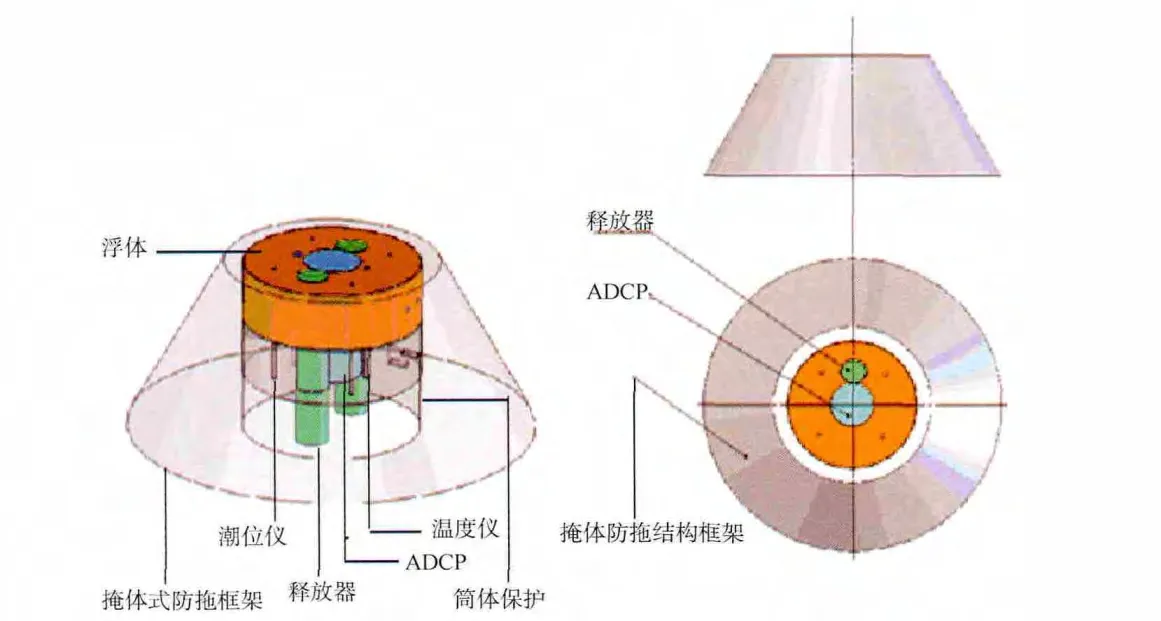
圖1 掩體式防拖潛標探測裝置示意圖Fig.1 Diagram of the anti-dragging blockhouse submerged buoy
2 掩體式防拖潛標探測裝置的結構
掩體式防拖潛標探測裝置由掩體式防拖框架、筒體保護裝置、浮體組件三部分組成(見圖1)。
2.1 掩體式防拖框架
防拖框架分為水泥混凝土與鋼結構 2種, 圓形與方棱形2種。
掩體形狀為弧形, 整個掩體表層為光滑的, 弧形坡度的角度至少應在 40°范圍內, 最理想效果是35°, 其高度均為40 cm。
2.1.1 掩體式混凝土框架
掩體式混凝土框架由鋼筋混凝土澆注而成。混凝土構造框架結構內的預留空間, 需要根據浮體的體積而定, 預留空間可足以容納整套潛標測量系統。按以上設計再澆注水泥、沙子、石子合成混凝土構筑而成。
混凝土框架構造由基座與掩體二部分組成, 為了運輸和裝載方便, 使用時再用螺栓組成一體。該框架重量視海區底質條件而定, 分別為100, 200, 300 kg, 直至 1 t···不等。
2.1.2 掩體式鋼結構框架
掩體結構構造框架可選用各種不同金屬材料制作, 不銹鋼材料為最佳選擇。不銹鋼結構框架外形為弧形, 掩體形狀表面光滑。框架內部可容納整套測量連體潛標加載的測量儀器設備。鋼結構底部需加配重塊, 用預制的水泥條塊或預先預制好的條形或其他材料作為配重, 固定在框架的底部或周圍。重量可視水深和海床硬度而定。配重為100, 200, 300 kg, 直至 1 t···不等。
2.2 筒體保護裝置
因掩體式防拖潛標探測裝置中鋼結構框架的配重水泥條塊或水泥板, 基本是處在架子的底部和周圍, 鋼結構掩體框架與混凝土掩體框架內的剩余空間大于潛標浮體外徑, 因此掩體式防拖潛標裝置內同樣需要采用筒體保護裝置 。文獻[7-9]使用的是有纜繩錨定浮標觀測、繃緊形單點錨定潛標系統測量方法, 本文是無纜繩觀測, 從有纜到無纜觀測是從根本上改變了測量方式與方法。
筒體保護是由不銹鋼板或塑料板制作成的圓柱體、方形體。上端端口是敞開式的, 下端端口視地質條件而定, 多為半封閉式或封閉式的。根據測量潛標系統外徑大小預做一個大于浮體潛標外徑的不銹鋼圓柱體或方形柱體, 以保證儀器設備處在正常工作狀態及順利釋放浮出水面。
筒體保護裝置, 可防止外力對浮標的作用; 避免潛標因海區海床軟泥地質而沉降、浮體進入軟泥而不能順利升浮; 使儀器設備測量系統釋放裝置順利升浮; 避免潛標受掩體式防拖框架內壁的阻力及避免釋放器吊鉤掛在鋼結構上面; 因潛標受底流、臺風流、內波流等的影響, 造成潛標測量裝置傾斜、搖擺、不穩定, 以致影響測量質量, 而筒體保護裝置解決了這些難題。
2.3 浮體組件
2.3.1 浮體組件構造
浮體采用玻璃維珠材料制作而成。制作浮體時,首先根據儀器設備大小、重量在浮體內預留放置儀器的空間, 然后在浮體內加載儀器設備, 組合成為潛標測量單元。每塊浮體預制成浮力重為20, 30, 或40 kg···不等的圓柱體或其他柱狀體。使用時, 浮體的數量視儀器設備的重量而定。將儀器固定在預先做好的潛標預留孔內, 構成潛標測量浮體。浮體放置在掩體式混凝土框架或鋼結構框架內, 見圖2。
2.3.2 潛標浮力計算
潛標浮力計算[10-11]:
r1=255 mm,r2=105 mm;r3=68 mm;r4=7.5 mm;H=190 mm
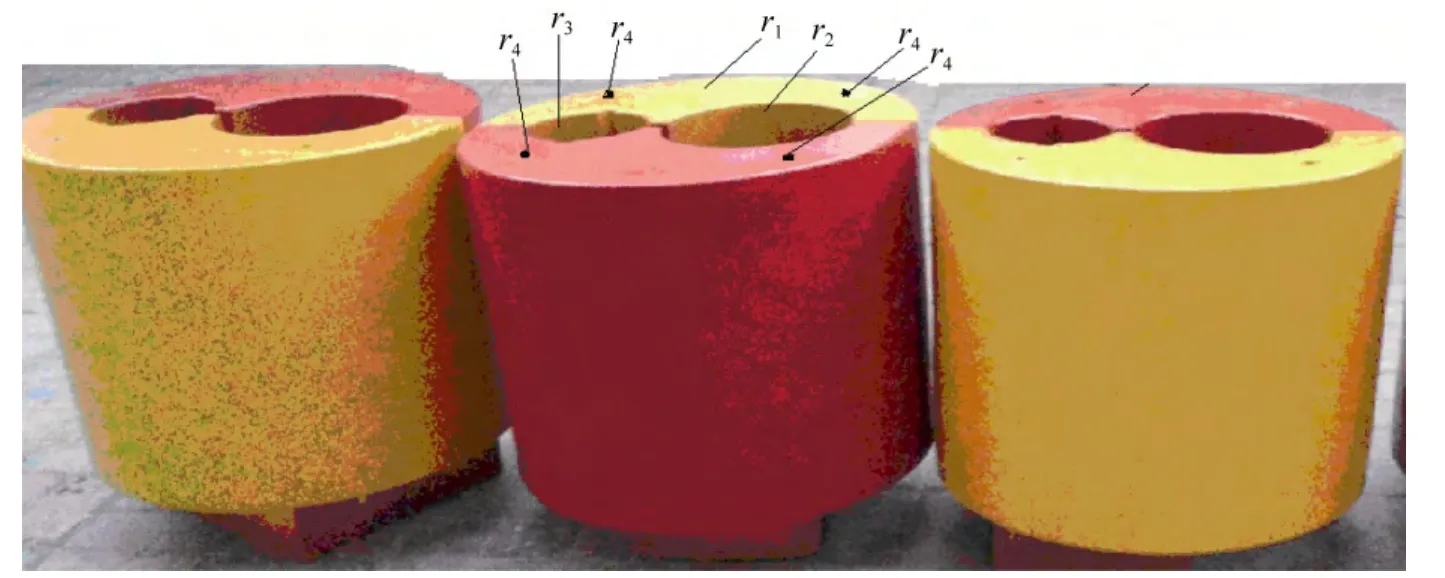
圖2 浮體組件構造圖Fig.2 Structure of the floating components
H表示浮體高度。
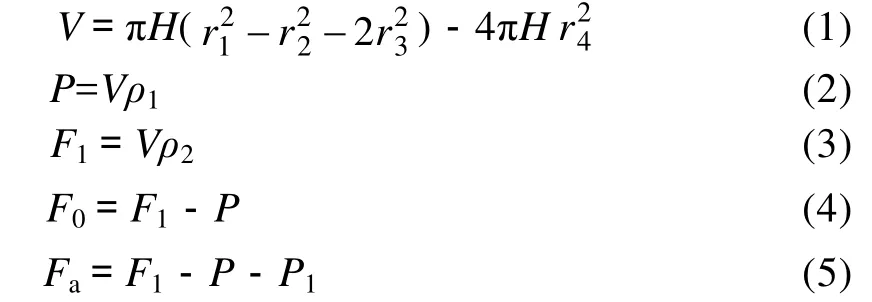
V表示浮體體積, 單位為kg/m3;P表示潛標重量, 單位為 kg;ρ1表示浮體密度,ρ2表示海水密度,ρ1=500 kg/m3,ρ2=1 025 kg/m3;F1表示潛標浮力, 單位為kg;F0表示浮體的凈浮力;P1表示儀器重量;Fa為浮體減去儀器重量的凈浮力。
由公式(1)至(5)計算得出, 預留孔為單釋放器時潛標的凈浮力為29.7 kg。單孔潛標系統凈浮力為10 kg。
2.3.3 潛標升浮時間及受力計算
潛標在上浮過程中, 會受到重力、浮力、水流作用力。浮力大于重力, 即凈浮力大于0, 則潛標上浮;浮力小于重力, 即凈浮力小于 0, 則潛標下沉。在潛標上浮初期, 在凈浮力作用下潛標加速上浮, 為防止潛標向上運動, 在潛標上必須有一個力與流體質點所施的力大小相等, 方向相反, 這個力就是上升阻力。隨著速度的增加, 其上升阻力也增加, 最后與凈浮力大小相等, 方向相反, 作用在浮體上的力達到平衡, 這時, 潛標以恒定的速度上升, 直到水面[11]。
潛標外形為半球體和圓柱體組合而成, 在上升過程中, 潛標姿態保持不變, 可認為迎流面為近似半球體, 迎流投影面積為球體截面積[11-13],A=πr2,r為潛標半徑。
根據現有潛標尺寸及表面材質, 得知潛標的阻力系數C=0.4。
上升阻力大小為
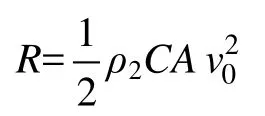
ν0表示上升速度(m/s);R表示上升阻力(kPa)。極限速度計算:
當潛標以恒定速度上升時, 作用力平衡為
B表示浮球浮力。
潛標上升極限速度為
根據本試驗, 可以計算出浮球上升的極限速度為0.67 m/s, 即浮球穩定上升速度為0.67 m/s。
根據上述條件, 可以計算出潛標上升時間,
t表示潛標上升時間;h表示水深。
由上述公式計算出表1的結果。
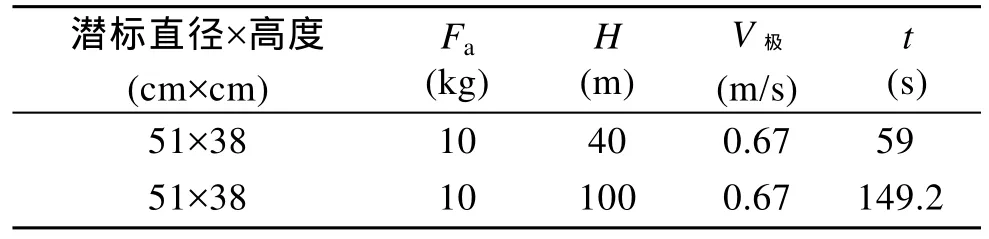
表1 潛標不同布放深度的升浮時間Tab.1 The timing of release of submersible buoy at different depths
3 掩體式防拖潛標探測裝置海上投放與回收
于2014年3~7月在南海(水深100 m), 2014年6~9月在渤海曹妃甸、蓬萊油田開發區(水深20~40 m)進行投放與回收, 本裝置適用于淺海海區水深230 m且底質不是軟泥的、較為平坦的海域。投放與回收是在惡劣的海洋環境條件下, 無人值守, 長期、連續、自動地監測下進行的。
3.1 投放
掩體式防拖潛標探測裝置在海上的投放, 可以在漁船、工程船、拖船等上進行。先把掩體式防拖潛標探測裝置吊掛在船舷外, 然后讓該裝置自由落體沉入海底。該裝置搭載了釋放器、美國產 300k ADCP、日本產 ELC單點海流計、水位計、水溫儀等。也可加配其他測量儀器。海上投放示意圖見圖3。
3.2 回收
用漁船對該裝置進行回收, 已多次成功回收,有效預防和解決了測量儀器受各類船只航行作業干擾、破壞等難題, 獲取了大量的實測剖面海流資料,水位資料, 溫度、鹽度資料。實驗結果良好。
平流回收時, 潛標測量系統回收升浮時間約為1 min。在漲、落潮時, 回收升浮時間約為不超過2 min。由此看出漲、落潮對上升時間和平移距離影響很小,平移距離為20 m左右。

圖3 掩體式防拖潛標探測裝置海上投放示意圖Fig.3 Diagram of deployment of the blockhouse anti-dragging submerged buoy measurement device
該裝置在海上的投放與回收, 均不帶系留繩,是目前國內外潛標防拖的一種最佳裝置。該裝置應用在中國海域的淺水區, 在平流、平潮期間回收更為理想。
4 小結
于2012年完成最初樣本, 后經不斷改進和完善,從更深層次的角度, 設計出了掩體式防拖潛標探測裝置, 到目前為止, 本設計是比較理想的。本裝置于 2014年 3~7月在南海(水深 100 m),2014年6~9月在渤海曹妃甸、蓬萊油田開發區(水深20~40 m)進行投放與回收。實驗結果良好。本裝置能夠避免被漁網、流網拖走, 可長期隱蔽在水中, 防拖潛標系統可以在惡劣的海洋環境條件下, 無人值守, 長期、連續、自動地對海洋環境進行監測。具有其他調查方法無法代替的作用。本裝置有望解決多年來海流、潮位、水溫、鹽度測量剖面懸而未決的難題, 為今后海洋水文環境觀測開辟了一個嶄新的途徑。
[1]倪佐濤, 姜靜波, 徐永平, 等.一種用于石油平臺的有纜潛標系統的設計與布放方法[J].海洋科學, 2012,36(12): 81-83.
[2]劉素花, 李思忍, 徐永平.基于單片機和模糊控制的潛標自動防碰撞系統[J].海洋科學, 2010, 34(10):57-61.
[3]蘭志剛.平臺基有纜潛標實時內波監測系統[J].海洋科學, 2012, 36(12): 76-80.
[4]王士榜, 孫壽昌.測流潛標系統中儀器架的改進[J].海洋科學, 1985, 9(5): 50.
[5]蘭志剛, 龔德俊, 劉育豐, 等.一種簡易的潛標輔助尋標定位系統[J].海洋科學, 2006, 30(12): 1-4.
[6]趙忠生, 袁志偉, 黃磊, 等.深海潛標ADCP的實時數據傳輸[J].海洋科學, 2012, 36(8): 94-97.
[7]王婷.國外海洋潛標系統的發展[J].聲學技術, 2011,30(3): 324-326.
[8]李飛權, 張先明, 張鵬, 等.海洋潛標系統的設計和應用[J].海洋技術, 2004, 23(1): 19-21.
[9]楊坤漢, 王明午.繃緊型單點錨定潛標系統布放回收操作方法[J].海洋技術, 1989, 8(1): 52-53.
[10]王明午.海洋潛標系統的靜力分析和姿態計算[J].海洋技術, 2001, 20(4): 42-43.
[11]徐如彥, 沈寧, 倪佐濤, 等.自升式連體潛標測量系統的設計與實施[J].海洋科學, 2014, 38(12): 93-97.
[12]朱剛, 杜月中.波浪作用下潛標拖纜動力學分析[J].海洋工程, 2007, 25(4): 15-20.
[13]郭飛, 盛巖峰, 何紅輝, 等.淺海環境觀測專用潛標和潛標錨泊系統的研究[J].海洋技術, 2000, 19(2): 7-12.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
