GPS精確定位技術(shù)在小灣水電站工程變形測量中的應(yīng)用
2015-12-14 01:51:24余記遠(yuǎn)楊金玲趙志勇楊明龍鄒興宏
測繪工程 2015年4期
陳 豪,余記遠(yuǎn),楊金玲,趙志勇,楊明龍,王 川,鄒興宏
(1.河海大學(xué),江蘇 南京 210098;2.華能瀾滄江水電有限公司,云南 昆明 650214;3.黑龍江工程學(xué)院,黑龍江 哈爾濱150050;4.中國電建昆明勘測設(shè)計研究院有限責(zé)任公司,云南 昆明650051;5.昆明理工大學(xué),云南 昆明650091)
小灣水電站位于云南省境內(nèi),系瀾滄江中下游梯級開發(fā)規(guī)劃中的第二級,工程屬大(I)型一等工程,由混凝土雙曲拱壩、壩后水墊塘及二道壩、左岸泄洪洞和右岸地下引水發(fā)電系統(tǒng)組成。電站以發(fā)電為主,兼有防洪、灌溉等綜合功能,裝機容量4 200MW,于2010年8月全部投產(chǎn)。水庫總庫容150億m3,具多年調(diào)節(jié)能力,2012年10月首次蓄至正常蓄水位。
鑒于小灣電站規(guī)模大、大壩高等特點,電站建立了全國規(guī)模最大的水電工程安全監(jiān)測系統(tǒng),共計安裝埋設(shè)監(jiān)測儀器10 761部(臺)。在遵循“實用、可靠、先進(jìn)、經(jīng)濟”原則,滿足國家法律、現(xiàn)行規(guī)范和工程建設(shè)運行管理要求基礎(chǔ)上,小灣電站在10余年的建設(shè)期間審慎使用部分具有國內(nèi)領(lǐng)先水平的新型安全監(jiān)測技術(shù),其中GPS精確定位技術(shù)作為傳統(tǒng)外部變形監(jiān)測的有效補充和驗證手段,先后應(yīng)用于電站樞紐區(qū)工程邊坡、大壩和水庫庫岸滑坡體的變形監(jiān)測,提供持續(xù)可靠的監(jiān)測數(shù)據(jù),充分滿足電站建設(shè)期、蓄水期和運行期的工程安全監(jiān)測需要,切實達(dá)到指導(dǎo)施工、反饋設(shè)計、保障安全的目的。
1 樞紐區(qū)工程邊坡GPS一機多天線變形測量系統(tǒng)
小灣電站壩址區(qū)左岸壩肩上游為2號山梁,下游為飲水溝堆積體,于2002年3月開始邊坡開挖支護(hù)。2003年12月開挖至EL.1 276m后邊坡變形出現(xiàn)異常,2004年1月持續(xù)降雨后變形加劇。堆積體邊坡一旦整體失穩(wěn)將嚴(yán)重影響工程建設(shè),因此電站建設(shè)各方在全力加固搶險堆積體邊坡的同時,投入包括GPS一機多天線變形測量系統(tǒng)在內(nèi)的各類安全監(jiān)測技術(shù)手段,提供失穩(wěn)預(yù)警保障和指導(dǎo)搶險施工。
1.1 系統(tǒng)架構(gòu)與組成
GPS一機多天線變形測量系統(tǒng)由數(shù)據(jù)采集、監(jiān)控中心、數(shù)據(jù)通訊三部分組成。數(shù)據(jù)采集由16個監(jiān)測點和2個監(jiān)測站組成,包括設(shè)在右岸監(jiān)理中心山梁的基準(zhǔn)點B1和左岸業(yè)主營地5#樓頂?shù)幕鶞?zhǔn)點B2,14個布置于2號山梁EL.1 250~EL.1 500m邊坡各層馬道上的監(jiān)測點,見圖1。GPS接收天線安裝在設(shè)有強制對中裝置和保護(hù)罩的砼監(jiān)測墩上,通信天線及供電電纜穿管保護(hù),2個基準(zhǔn)點和位于2號山梁EL.1 480m、EL.1 330m馬道上的1#、2#監(jiān)測站各配置1臺型號為DL-MILLEN-RT2的NOVATEL雙頻接收機。監(jiān)控中心設(shè)在業(yè)主營地,包括數(shù)據(jù)服務(wù)器和工作機,接收監(jiān)測數(shù)據(jù)后進(jìn)行計算分析。數(shù)據(jù)通訊主要采用GPRS無線傳輸技術(shù),采集端和接收端定時收發(fā)GPS實時監(jiān)測數(shù)據(jù)。
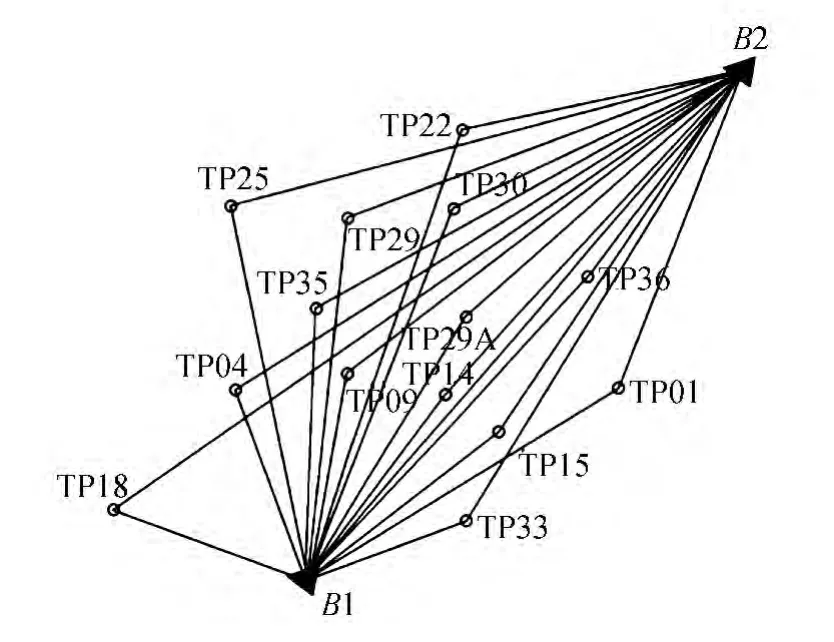
圖1 測點布置示意
1.2 技術(shù)特點
1)采用一機多天線技術(shù)。一機多天線技術(shù)符合當(dāng)時GPS成套設(shè)備購置費用高,大量測點布設(shè)條件下,有效降低系統(tǒng)建設(shè)成本的需求。除基準(zhǔn)點外,其余監(jiān)測點分別以6點和8點為單元,各單元測點共用1臺GPS接收機,接收機通過信道控制器與各測點GPS接收天線連接,信道控制器根據(jù)定制任務(wù)和時間轉(zhuǎn)換信道連通測點GPS天線,連續(xù)輪回接收各測點的GPS數(shù)據(jù),監(jiān)測數(shù)據(jù)同時存儲于接收機和控制器內(nèi),見圖2。
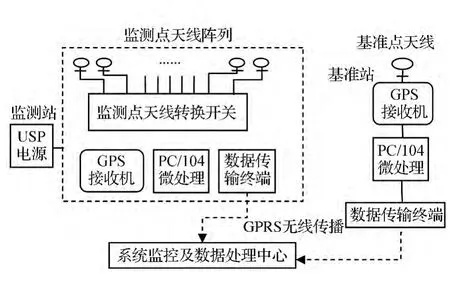
圖2 GPS一機多天線系統(tǒng)組成
2)選用適應(yīng)一機多天線和邊坡表面變形監(jiān)測的GPS定位模式和坐標(biāo)解算方式。采用靜態(tài)相對定位模式,各測點監(jiān)測時段1~2h,數(shù)據(jù)采樣間隔5s,衛(wèi)星高度截止角為15°,采集過程加入天線對應(yīng)的測站信息,并將數(shù)據(jù)發(fā)回到監(jiān)控中心。基準(zhǔn)站的數(shù)據(jù)直接發(fā)回到控制中心;監(jiān)控中心的服務(wù)器通過GPRS無線傳輸接收監(jiān)測數(shù)據(jù),在區(qū)分歸類各測點數(shù)據(jù)后,進(jìn)行以單歷元解算為主的站心坐標(biāo)解算,將各測點通過GPS精確定位獲取的WGS-84三維坐標(biāo)轉(zhuǎn)換為以基準(zhǔn)點B1為原點的站心地平坐標(biāo)系,即X軸正向指北,Y軸正向指東,H 軸指向垂直方向,與電站樞紐區(qū)江段近北南走向和邊坡整體位移方向基本吻合,使各測點站心地平坐標(biāo)變化量可以直觀反映邊坡位移情況。
1.3 監(jiān)測成果對比
系統(tǒng)自2004年6月至2009年5月共運行5年,整體運行率達(dá)到80%以上。由于GPS測量存在多路徑效應(yīng)、電離、平流層影響等無法完全消除的誤差,使得GPS監(jiān)測數(shù)據(jù)在真值附近跳動,使用多項式對GPS觀測值進(jìn)行擬合、滑動平均等方法對變形趨勢進(jìn)行模擬。采用Huber權(quán)函數(shù)的穩(wěn)健迭代權(quán)法進(jìn)行粗差的定位,并將探測出的粗差的權(quán)降低。由圖3可見,典型GPS測點與其附近的表觀點水平合位移監(jiān)測成果趨勢相同,但因GPS點與表觀點平面位置未完全重合,且兩種測量手段的誤差 影響和監(jiān)測時段不同,因此變形量有所差異。
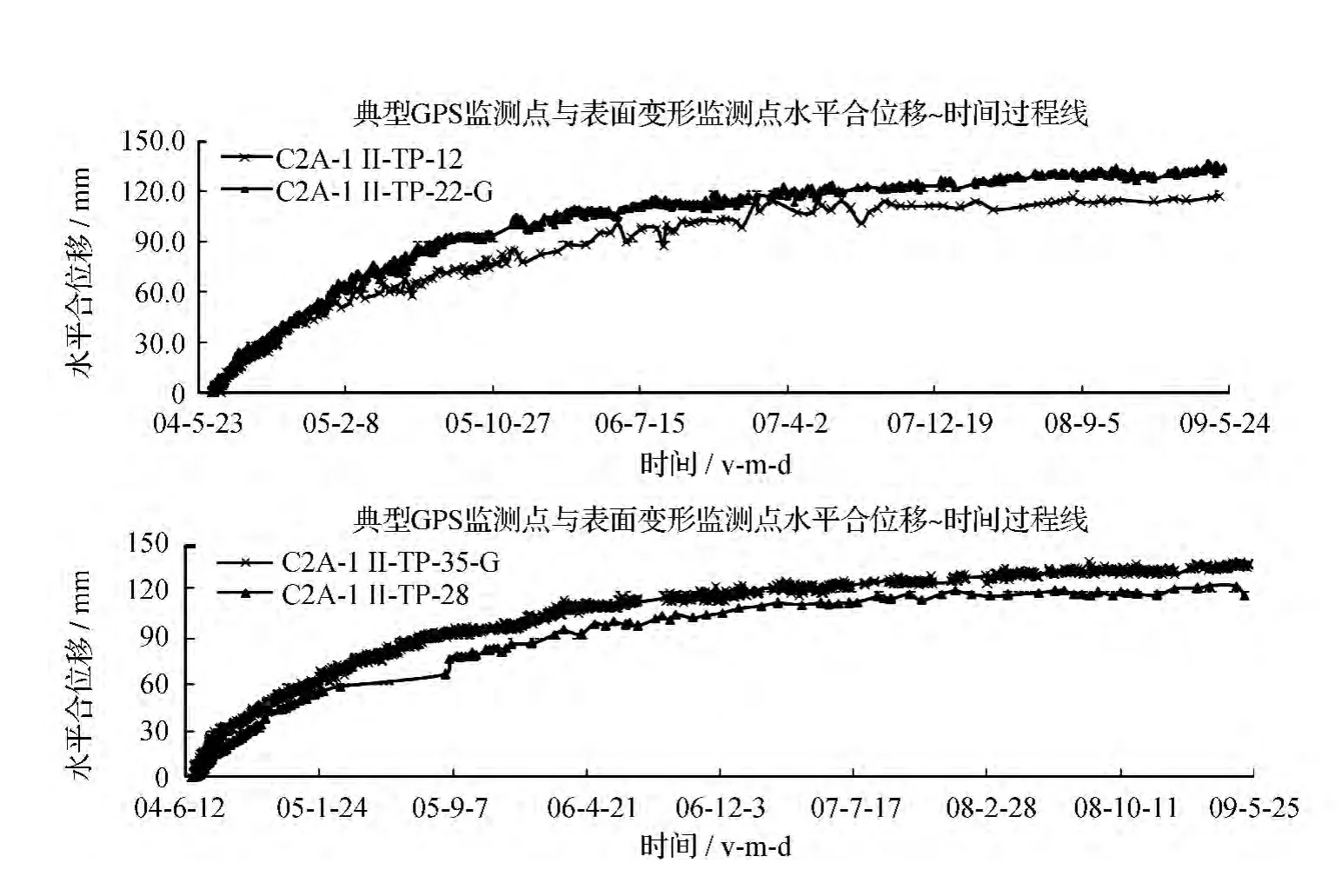
圖3 2#山梁典型GPS測點與表面變形監(jiān)測點水平合位移對比
2 混凝土雙曲拱壩壩頂GNSS變形測量系統(tǒng)
小灣電站混凝土雙曲拱壩最大壩高294.5m,由43個壩段和1個推力墩組成,是全球首座300m級特高拱壩。由于壩體較薄,壩基地質(zhì)條件復(fù)雜,壩上承受水荷載較大等因素導(dǎo)致壩體變形情況非常復(fù)雜,因此小灣拱壩除在重點壩段布設(shè)分段垂線,所有壩段分高程布置壩后馬道表觀點等傳統(tǒng)變形監(jiān)測設(shè)備外,還在壩頂選取了15個壩段分別安設(shè)了GNSS監(jiān)測點,實時監(jiān)測壩頂?shù)乃轿灰坪痛瓜蛭灰啤?/p>
2.1 系統(tǒng)架構(gòu)與組成
壩頂GNSS變形測量系統(tǒng)由數(shù)據(jù)采集、數(shù)據(jù)傳輸、數(shù)據(jù)控制及分析、防雷、供電5部分組成。數(shù)據(jù)采集包括分別設(shè)在左岸EL.1 380m高纜平臺上游側(cè)和右岸西北監(jiān)理樓頂?shù)?個基準(zhǔn)點,及大壩壩頂9#、15#、22#、25#、29#等15個主要壩段各1個測點,共計15個監(jiān)測點,見圖4。單機單天線結(jié)構(gòu),采用Leica公司的AR25 3D扼流圈天線、GMX902GG雙星雙頻接收機,天線、避雷針安置在監(jiān)測墩頂部,接收機則安置在測墩下部的設(shè)備箱內(nèi)。監(jiān)控中心設(shè)在右岸壩下游的中控樓內(nèi),包括數(shù)據(jù)分析存儲服務(wù)器和工作站,使用Leica專業(yè)Spider軟件用于數(shù)據(jù)采集、管理和計算,GeoMos軟件用于數(shù)據(jù)分析和系統(tǒng)集成。數(shù)據(jù)傳輸采用光纜和微波兩套系統(tǒng),保證通訊可靠性。
2.2 技術(shù)特點
1)采用可擴充接收多星座導(dǎo)航定位信號的GNSS系統(tǒng)。招標(biāo)設(shè)計階段小灣拱壩擬采用GPS一機多天線變形監(jiān)測系統(tǒng),技施階段根據(jù)GPS監(jiān)測技術(shù)發(fā)展及電站運行需要,改為單機單天線GNSS變形監(jiān)測系統(tǒng),采用全球首款高精度支持多星系統(tǒng)的GMX902監(jiān)測型接收機,目前以接收美國GPS信號為主,俄羅斯GLONASS信號為輔,并預(yù)留歐盟Galileo和我國北斗二代信號通道。支持多星系統(tǒng)意味著同一時刻接收機可接收到定位信號的衛(wèi)星顆數(shù)將達(dá)到單一GPS系統(tǒng)的兩倍甚至四倍,在定位精度進(jìn)一步提高的同時,載波信號解算時長將大幅縮短。此外西南高山峽谷地區(qū)因可視空域狹窄導(dǎo)致衛(wèi)星失鎖的幾率也將降低,提高極端氣候條件下GNSS變形監(jiān)測系統(tǒng)的運行保證率。
2)完善的變形監(jiān)測互補校驗設(shè)計。為滿足不同監(jiān)測系統(tǒng)數(shù)據(jù)成果的互補互驗,確保GNSS監(jiān)測系統(tǒng)的可靠性,將接收機天線和360°全向光學(xué)棱鏡分層安置在監(jiān)測墩頂?shù)耐S強制對中架上,見圖5。使用TM30全站儀定期對全向棱鏡進(jìn)行前方交會法人工測量,并與同期的GNSS監(jiān)測數(shù)據(jù)進(jìn)行對比分析。
3)有效克服臨近大水體多路徑效應(yīng)影響。為有效削弱壩前水庫大面積水體引發(fā)的無線電信號多路徑效應(yīng)影響,使用AR25 3D多頻多星扼流圈天線。該天線提供亞毫米相位中心精度,并抑制無線電信號干擾,相比傳統(tǒng)2D天線更具優(yōu)異的低高度角衛(wèi)星跟蹤性能,見圖6。
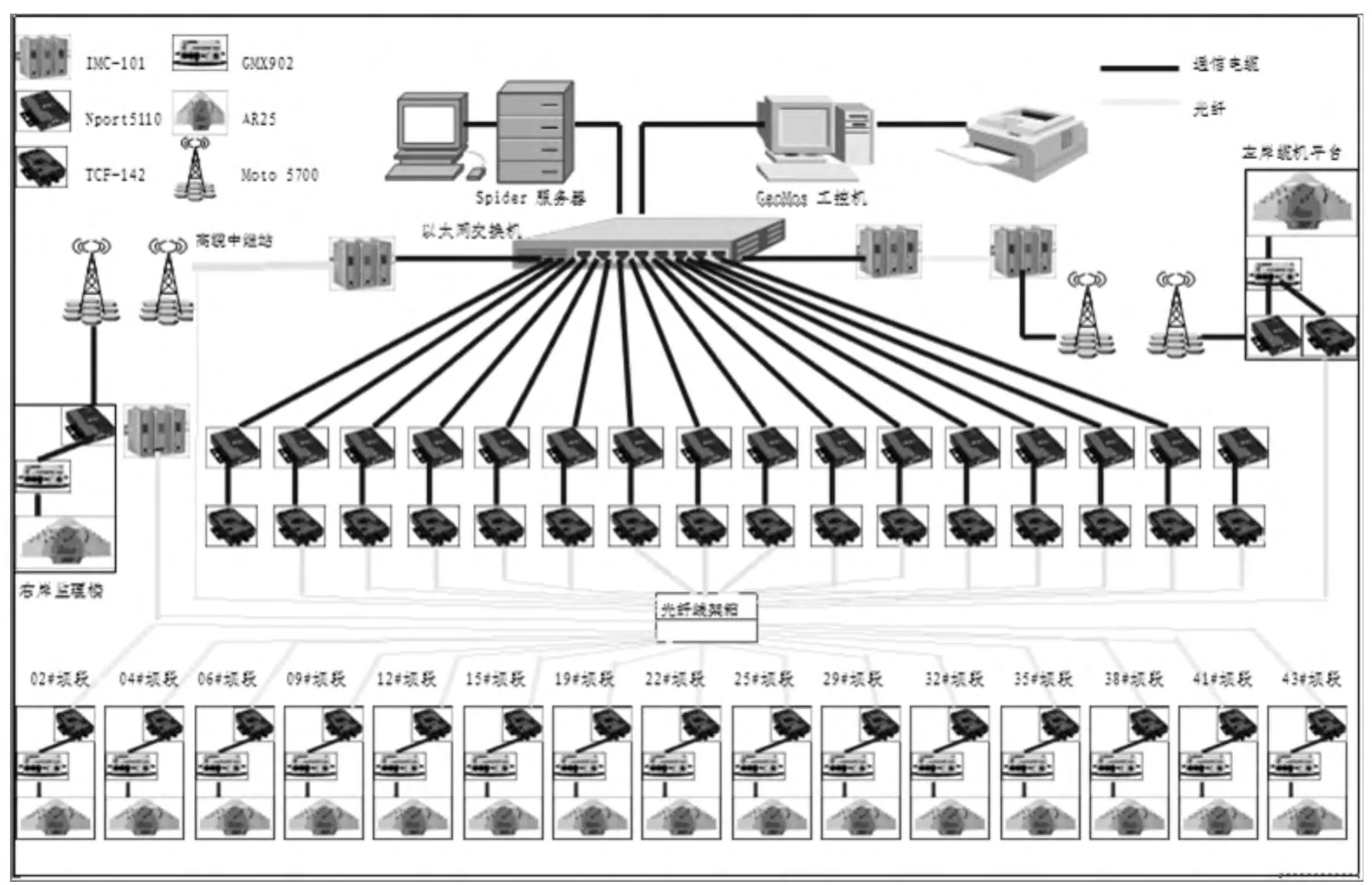
圖4 壩頂GNSS變形測量監(jiān)測系統(tǒng)架構(gòu)

圖5 壩頂GNSS測點
4)選用了適應(yīng)拱壩壩體變形監(jiān)測的GPS定位模式和坐標(biāo)解算方式。2個基準(zhǔn)點與小灣電站專一等平面變形監(jiān)測控制網(wǎng)進(jìn)行聯(lián)測,使GNSS監(jiān)測成果與小灣大壩傳統(tǒng)外部變形監(jiān)測成果全面統(tǒng)一。系統(tǒng)采用雙基站靜態(tài)相對定位差分模式,采用12~24h監(jiān)測數(shù)據(jù)解算每條基準(zhǔn)點至監(jiān)測點的基線,得到各監(jiān)測點的坐標(biāo),且每個基準(zhǔn)點均能分別計算壩頂測點變化,便于測點數(shù)據(jù)互相檢驗。最終監(jiān)測成果轉(zhuǎn)換成小灣拱壩坐標(biāo)系,根據(jù)各壩段壩軸線與拱壩中心線的方位角,換算成適應(yīng)各壩段軸線方向的徑向和切向位移。
2.3 監(jiān)測成果對比
系統(tǒng)于2011年10月27日正式投運,至目前已歷經(jīng)3個水庫蓄放周期,運行工況良好。布點壩段中9個設(shè)有垂線監(jiān)測,其余與壩頂表觀點重合,因此壩頂表觀點與壩體垂線監(jiān)測資料均可作為GNSS監(jiān)測成果對比依據(jù)。選取上述3個監(jiān)測系統(tǒng)2011年11月9日測值作為相對初值進(jìn)行比較。由圖7、圖8可見,主要特征水位下GNSS與表觀點、垂線徑向、切向監(jiān)測成果趨勢相同,測值基本一致,較為吻合,均符合拱壩隨庫水荷載增減的變形規(guī)律。徑向:庫水位上升荷載增大,壩體向下游變形,庫水位消落荷載減小,壩體向上游變形,徑向變形從河床壩段向岸坡壩段逐漸減小;切向:庫水位上升,各壩段呈現(xiàn)向兩岸岸坡方向變化趨勢,庫水位下降,各壩段呈現(xiàn)向河床方向變化趨勢,切向變形基本對稱。
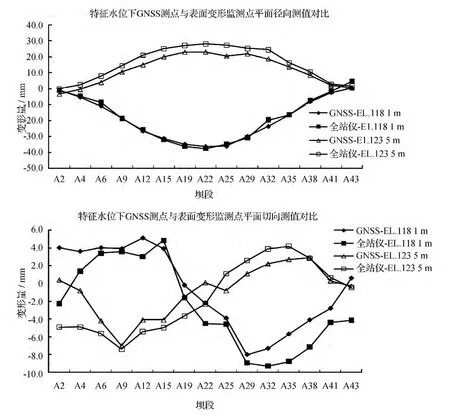
圖7 特征水位下壩頂GNSS測點與表觀點平面徑向與切向測值對比
3 水庫庫岸滑坡體GNSS變形測量系統(tǒng)
2008年12月19日小灣水庫開始蓄水,至2012年10月首次蓄至正常蓄水位,在瀾滄江干流和黑惠江支流分別形成回水長度為178km和123km的水庫。2009年8月和2010年6月水庫蓄水期間分別發(fā)現(xiàn)黑惠江支庫距壩址3.2km八字耳朵庫段和瀾滄江主庫距壩址3km小水井庫段岸坡存在失穩(wěn)趨勢。因距離樞紐區(qū)較近,2011年6月在上述滑坡體上布設(shè)了表觀點,定期監(jiān)測。2012年4月在兩個滑坡體上投運GNSS監(jiān)測點,提高滑坡監(jiān)測預(yù)警實時性。
3.1 系統(tǒng)架構(gòu)與組成
水庫滑坡體GNSS系統(tǒng)架構(gòu)與壩頂GNSS系統(tǒng)相同,并共用左岸高纜平臺基準(zhǔn)點和右岸中控樓監(jiān)控中心。兩個滑坡體主監(jiān)測剖面上各布設(shè)4個GNSS測點。接收機選用性價比較高的徠卡GMX901單頻監(jiān)測一體型,滿足滑坡低頻度GPS監(jiān)測需要。天線和接收機整合封閉在碟形保護(hù)罩內(nèi)。因測點距監(jiān)控中心較遠(yuǎn)且滑坡體上布線困難,測點采用太陽能供電,數(shù)據(jù)傳輸采用無線形式,各測點上安裝定向無線網(wǎng)橋,通過瀾滄江右岸的無線中繼站將監(jiān)測數(shù)據(jù)傳輸至監(jiān)控中心,見圖9。
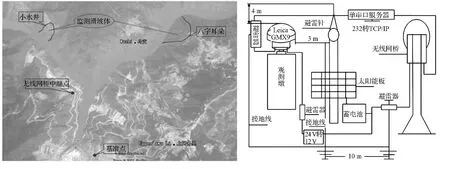
圖9 水庫滑坡體GNSS變形監(jiān)測系統(tǒng)平面布置與系統(tǒng)架構(gòu)
3.2 技術(shù)特點
1)采用可擴充接收多星座導(dǎo)航定位信號的GNSS系統(tǒng)。與壩頂GNSS系統(tǒng)相同支持多星系統(tǒng),提高高山峽谷地區(qū)滑坡GNSS監(jiān)測系統(tǒng)的定位精度和可靠性。
2)適應(yīng)滑坡變形監(jiān)測的單測點獨立單元形式。由于滑坡體自身的不穩(wěn)定性,且由于距離遠(yuǎn)、布點廣等原因,GNSS監(jiān)測點都采用獨立單元形式,即每個測點配置GMX901一體型接收機、太陽能野外供蓄電設(shè)備、避雷接地設(shè)備和無線通訊設(shè)備各一套,使每個測點可以獨立完成數(shù)據(jù)采集工作,而不受滑坡體局部失穩(wěn)造成個別測點破壞的連帶影響,有效提高全套數(shù)據(jù)采集系統(tǒng)的存活率。
3.3 監(jiān)測成果對比
八字耳朵和小水井滑坡體距左岸纜機平臺基準(zhǔn)點都約3km,各測點和基準(zhǔn)點分別組成基線,通過后處理解算方式獲得各測點24h高精度三維定位坐標(biāo),然后輸入GeoMoS工作站進(jìn)行滑坡變形分析。實際監(jiān)測過程中,將滑坡體GNSS測點與使用全站儀對岸前方交會法測得的位于附近的表觀點監(jiān)測數(shù)據(jù)進(jìn)行對比,八字耳朵滑坡體GNSS測點與表觀點監(jiān)測成果趨勢相同,但因兩類測點平面位置未完全重合,因此變形量有所差異;小水井滑坡體GNSS測點與表觀點監(jiān)測成果則趨勢與測值完全一致,見圖10。
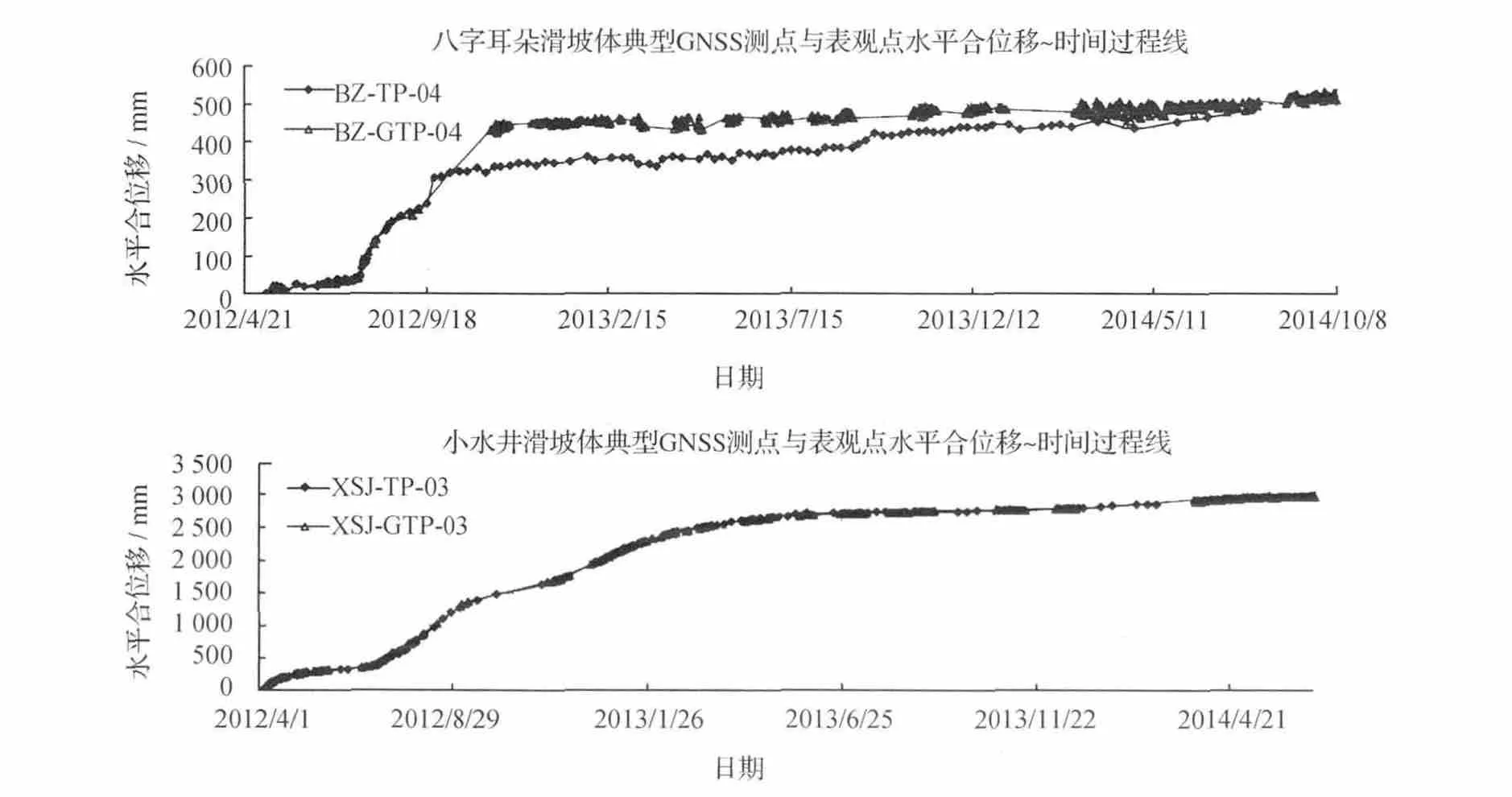
圖10 水庫滑坡體典型GNSS測點與表面變形監(jiān)測點水平合位移對比
4 結(jié)束語
小灣水電站成功將GPS精確定位技術(shù)應(yīng)用于工程邊坡、大壩和水庫滑坡體的外部變形監(jiān)測,作為傳統(tǒng)外部變形監(jiān)測的有力補充和驗證手段,為電站建設(shè)、蓄水和運行期的工程安全提供可靠保障。
從一機多天線到大壩壩頂和水庫滑坡GNSS系統(tǒng),GPS變形監(jiān)測系統(tǒng)在整個應(yīng)用過程中不斷優(yōu)化改進(jìn),使系統(tǒng)對各類型工程外部變形監(jiān)測的適用性不斷加強,數(shù)據(jù)獲取質(zhì)量、運行保證率和系統(tǒng)建設(shè)性價比持續(xù)提升。特別是大壩壩頂GNSS變形測量系統(tǒng)是國內(nèi)首個成功應(yīng)用于高山峽谷地區(qū)的非直線壩型的GNSS監(jiān)測系統(tǒng),系統(tǒng)構(gòu)建和運行中總結(jié)和積累的經(jīng)驗,為后續(xù)GPS精確定位技術(shù)在糯扎渡、金安橋、觀音巖等大型水電站大壩變形監(jiān)測提供借鑒和示范。
[1]徐紹銓.GPS測量原理及應(yīng)用[M].武漢:武漢大學(xué)出版社,2003.
[2]董澤榮.小灣水電站高邊坡安全穩(wěn)定監(jiān)測綜述[J].水力發(fā)電,2004,30(10):74-78.
[3]何秀鳳.GPS技術(shù)在水電工程中的應(yīng)用及展望[J].水電自動化與大壩監(jiān)測,2002,26(4):6-9.
[4]肖勝昌,王沖.GPS一機多天線實時監(jiān)測系統(tǒng)在小灣水電站中的應(yīng)用[J].水力發(fā)電,2014,32(11):22-27.
[5]王川,楊珊珊,董澤榮.GNSS監(jiān)測系統(tǒng)在小灣拱壩安全監(jiān)測中的應(yīng)用[J].水電自動化與大壩監(jiān)測,2013,37(1):63-67.
[6]陳豪,朱大明,楊金玲.GPS應(yīng)用于高空施工機械安全監(jiān)控初探[J].測繪工程,2008,17(2):43-47.
[7]岳順,翟長治,李小奇.基于小波分析的動態(tài)GPS監(jiān)測序列噪聲分析[J].黑龍江工程學(xué)院學(xué)報,2014(1):30-33.
[8]羅和平,邱蕾.利用載波相位平滑偽距分析深圳市電離層變化規(guī)律[J].測繪工程,2014,23(2):54-56.
[9]鮑建寬,范興旺,高成發(fā).4種全球定位系統(tǒng)的現(xiàn)代化及其坐標(biāo)轉(zhuǎn)化[J].黑龍江工程學(xué)院學(xué)報,2013(1):36-40.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
