衛星導航系統接收機原理與設計——之一(上)
2015-12-12 01:07:42劉天雄
衛星與網絡 2015年7期
+ 劉天雄
衛星導航系統接收機原理與設計——之一(上)
+ 劉天雄

圖1 基于到達時間測距原理接收機實現對用戶位置的解算
概述 Receiver overview
全球衛星導航系統簡稱GNSS(Global Navigation Satellite System)系統,由空間段SS(space segment)、地面控制段CS(control segment)以及用戶段US(user segment)三個部分組成,其中用戶段US就是咱們手里拿的接收機。空間段SS的每顆導航衛星連續播發無線電導航信號,簡稱為SIS信號(Signals In Space),通常是L頻段無線電信號,載波信號調制有周期數字碼(periodic digital code)和導航電文(Navigation message),周期數字碼又稱為偽隨機噪聲測距碼,簡稱PRN(pseudo-random noise code)碼。
衛星導航系統定位的基本原理是單向到達時間測距,簡稱TOA(Time Of Arrival)原理,接收機通過解調導航信號的電文得到衛星的位置坐標,通過測量導航信號從衛星到接收機的傳播時間來測距,以導航衛星為球心,信號傳播的距離為半徑畫球面,用戶接收機一定在球面上,當接收機分別測量出與四顆導航衛星之間的距離時,四個球面相交于一個點,即用戶接收機的位置坐標,如圖1所示。如果是導航儀,接收機根據位置坐標和數字地圖的映射關系,可以把定位結果映射到數字地圖上,在顯示屏上給出地址信息。
根據不同的應用場景,衛星導航接收機可以設計成多種不同狀態,從單頻(single-frequency)到多頻(multi-frequency)、從單系統(single -constellation)到多系統(multi-constellation)、從專業測量型(survey)到一般車載導航型(automotive applications),設計接收機時還需要考慮信號帶寬(signal bandwidth)、信號調制(modulation)、偽碼速率(code rate)等技術指標,權衡工作性能(performance)、成本(cost)、功耗(power consumption)以及自主性(autonomy)等要求。
雖然導航接收機可以設計成多種狀態,但接收機的基本結構是一致的,主要包括接收天線(Antenna)、射頻前端(Front End)、基帶數字信號處理(Baseband signal processing)、應用處理(Applications Processing)四個模塊,典型衛星導航接收機組成結構如圖2所示,除了上述四個主要模塊,接收機還得有供電模塊(power unit)和機箱(enclosure)等輔助模塊。
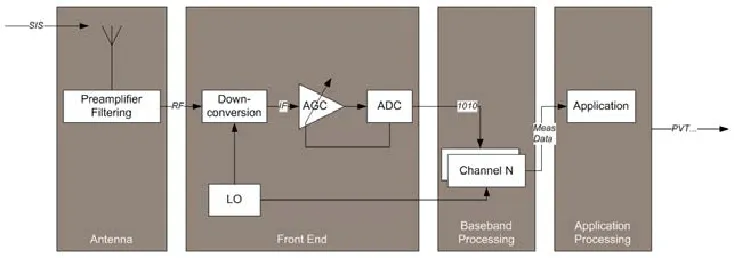
圖2 一般衛星導航系統接收機結構組成
衛星導航接收機信號處理的核心內容是捕獲(acquisition)、跟蹤(tracking)、解調(demodulation)信號,譯碼衛星的星歷、時鐘偏差校正、電離層誤差改正等導航導航電文數據,用戶接收機才能夠利用PRN碼測量出衛星與用戶機之間的距離,代入定位方程后才能給出位置P(Positioning)、速度V(Velocity)和時間T(Timing)等導航解(navigation solution),簡稱PVT結果,其中位置解算結果分別以導航衛星信號發射天線的接相位中心(antenna phase center)和用戶機的收天線相位中心為參考點。
1 接收機功能
衛星導航接收機的任務是捕獲按一定衛星仰角要求所選擇的導航衛星的信號,跟蹤這些導航衛星信號,對所接收到的導航信號進行放大、變換和處理,測量出導航信號從衛星到用戶接收機的傳播時間,解調、譯碼出導航衛星播發的導航電文數據,并根據導航電文給出的星歷參數和時間信息,解算出用戶的位置坐標,接收機是衛星導航系統的用戶接口(user interface)。
衛星導航接收機完成導航信號的相關接收,所謂相關接收是指接收機在接收衛星導航系統衛星信號時,通過改變本地偽隨機碼生成器的相位,使其與相應衛星信號的偽隨機碼的相位對齊,從而完成對該衛星信號的跟蹤和鎖定的過程。接收機利用捕獲環路和跟蹤環路實現導航信號同步(幀同步和碼同步),確定導航信號在空間的傳播時間,用信號傳播時間乘以無線電信號的傳播速度,即可得到衛星與接收機之間的距離,代入導航定位方程,解算出用戶所在位置的PVT導航解。
1.1接收 信號
接收機首先要捕獲(acquisition)可見范圍內的導航信號,識別出接收到的信號是那顆導航衛星播發的,然后才能開展進一步的跟蹤、解調和偽距測量。GPS、Galileo和北斗衛星導航系統均采用CDMA碼分多址(Code Division Multiple Access)信號技術,星座中所有導航衛星的同類信號多路復用在同一個載波頻率上,而每顆衛星對應一個唯一的該類信號偽隨機噪聲碼,偽隨機噪聲碼信號具有高度自相關性(auto correlation),0延遲時,自相關函數取得最大值(峰值),而信號之間的互相關性(cross-correlation)極低,不同偽隨機噪聲序列(碼)之間幾乎是正交(orthogonal)的。
偽隨機噪聲碼先對導航電文進行擴頻調制處理,再將擴頻信號調制在載波信號中。各大衛星導航系統為了推廣民用導航信號的應用,以空間信號接口控制文件形式公開發布其導航信號的結構、偽隨機噪聲碼設計以及導航電文等信息,空間信號接口控制文件簡稱SIS ICDs(Signal In Space Interface Control Document)。用戶接收機在搜索導航信號前可以預先獲取每顆衛星的偽隨機噪聲碼,因此,通過本地復制PRN碼(偽碼)信號與接收到的導航PRN碼信號進行相關處理(signal correlation)結果,就可以快捷地判斷出這顆衛星(信號)是否在可見范圍內。
1.2計算偽距及其變化
根據導航信號的播發時刻(衛星星載原子時鐘標記)和接收時刻(接收機機時鐘標記),衛星與接收機完成時間“同步”處理后,導航接收機可以計算出導航信號在空間的傳播時間dt,乘以無線電信號的傳播速度c,就可以得到衛星與用戶機之間的距離R,即,通過測量本地時鐘與恢復的衛星時鐘之間的時延來測量從接收天線到衛星的距離,這是導航接收機定位的數學基礎。接收機的位置一定在以衛星為圓心,以衛星與用戶機之間的距離為半徑的球面上,以平面定位為例,接收機的位置一定在以衛星為圓心,以衛星與用戶機之間的距離為半徑的兩個圓的交點上,如圖3所示。
定位原理假設接收機測量出與導航衛星之間的幾何距離,但現實情況是用戶接收機時鐘、衛星時鐘和系統時鐘三者不可能嚴格時間同步,其實也沒有必要同步,必然會存在接收機鐘差、衛星鐘差,同時導航信號在空間傳播過程中還會產生對流層延遲和對流層延遲,以及有電文衛星星歷參數得到的衛星軌道位置、信號多路徑及接收機熱噪聲等誤差源,由導航信號傳播時間乘以傳播速度得到的衛星與用戶機之間的距離也存在較大的誤差,一般稱為“偽距”,英文翻譯為"pseudorange",在代入導航方程求解用戶位置前,需要進一步修正處理。
1.3計算位置、速度和時間
根據偽距觀測量以及導航電文等信息,接收機應用處理模塊(application processing)可以解算出接收機所在的位置(經度、緯度、高度)、速度和時間,實現系統的時間傳遞(time transfer),即授時功能,也可以將數據收集整理在地面站后期處理(postprocessed in the ground stations)。
2 接收機組成
GNSS用戶接收機由天線(Antenna)、射頻前端(RF Front-End)、數字信號處理(Digital signal processing)通道和應用處理(application processing)模塊組成,GNSS接收機結構組成如圖4所示。
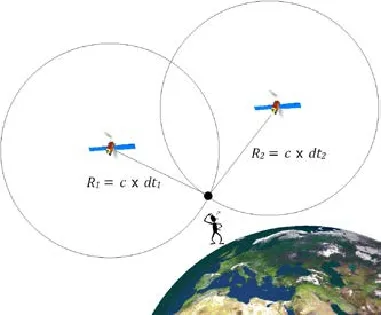
圖3 通過計算信號傳播時間確定用戶位置
天線將接收到的導航信號傳輸給射頻前端,射頻前端通常也稱為前置放大器,射頻前端濾除噪聲并放大導航信號,完成射頻信號下變頻、濾波以及模數轉換處理,生成包括實部(real)和虛部(complex)兩部分組成的的數字基帶中頻信號,又稱為I支路同相(In-Phase)分量和Q支路正交(Quadrature)分量。I支路和Q支路分量分別與由本地數控振蕩器產生兩路正交映射載波相乘,進行載波混頻剝離,載波混頻剝離后的兩支路分別再與超前、即時和滯后三路本地復制測距碼相乘,進行擴頻碼剝離,當通過調整載波頻率和偽碼相位使得兩個跟蹤環路穩定跟蹤后,即可測得偽距觀測量,同時譯碼出導航電文數據。解算出衛星與用戶機之間的測距值,根據三角測量原理,解算出用戶的位置坐標。
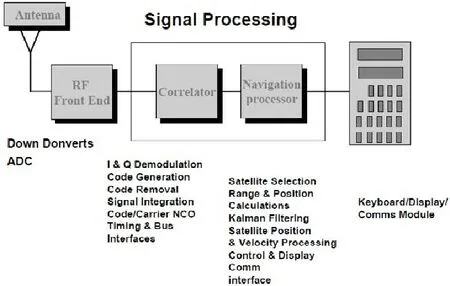
圖4 GNSS接收機結構組成
需要進一步指出的是,導航衛星在軌道空間上高速運動,為了獲得連續的定位解算結果,導航接收機必須連續地搜索(search)、捕獲(acquire)、跟蹤(track)可見范圍(in view)內的導航衛星播發的無線電導航信號,并與導航信號保持同步。
2.1天線
導航接收機的天線負責接收來自空間導航衛星播發的L頻段(1.2~1.6 GHz)射頻電磁波信號,并將電磁波信號轉換為微波電信號,并將該模擬導航信號輸入到射頻前端。有時接收天線還需要配置放大器和濾波器,從用戶角度來說天線是地面接收機和空間導航衛星星座之間的接口。
導航接收機天線設計的主要目標是在給定仰角(elevation angle)、在導航信號播發方向獲得最大天線增益(antenna gain),同時抑制多徑干擾信號。天線的技術要求包括增益與接收仰角、多徑和抗干擾、相位中心穩定性以及體積、功耗、便攜性和環境條件約束條件。
鑒于衛星導航信號強度極其微弱且易受到干擾,可以采用陣列天線(antenna arrays)修改天線的輻射方向圖(radiation pattern),以抑制干擾信號方向的接收。此外,天線波束調整技術(beam steering techniques)可以最大天線增益跟蹤并接收給定衛星的導航信號。
因此,GPS接收機天線的性能決定了接收機獲取導航信號的能力。接收機天線的性能指標有方向圖增益(Gain)、軸比(Axial ratio)、駐波比(VSWR)、噪聲系數(Noise figure)、相位中心(Phase Centre)、極化(Polarization)方式、相位中心的穩定性和重復性(phase stability and repeatability)等參數,其中相位中心的穩定性和重復性對于載波相位測距來說十分關鍵。
衛星導航接收機天線一般包括輻射單元(radiating element)、功率放大器(amplifier)和天線罩(radome)三部分,其中輻射單元安裝在金屬的“地平面”上。輻射單元決定了天線的帶寬和輻射特性,“地平面”影響天線的輻射方向圖形狀,特別是低仰角下的接收特性;放大器決定了接收機噪聲系數;天線罩影響天線的相位中心。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
