GIS與GPS在礦石碼頭調度中的應用
2015-12-11 05:57:30李亞輝張遠智董國鋒郭欣雨
測繪通報 2015年2期
關鍵詞:指令
李亞輝,張遠智,董國鋒,郭欣雨
(1.北京林業大學,北京100083;2.北京北斗星通導航技術股份有限公司,北京100094)
一、引 言
隨著我國經濟的快速發展,社會基礎建設及房地產建設也進入高峰期,由此也帶動了我國鋼鐵產業的快速發展。盡管我國鐵礦石資源豐富,但是分布不集中,開采成本高,而且礦石品位低[1],不能滿足國民經濟對鋼鐵量的需求。因此,我國鐵礦石主要依靠進口滿足需求,進口國家多為澳大利亞、印度、巴西和南非[2]。據資料記載,1985年我國鐵礦石進口量達1011萬 t,而2003年則達到1.48億 t,成為世界第一進口鐵礦石大國[3]。到2011年,我國鐵礦石進口量已達6.865億t的新高,同比增長10.9%。礦石碼頭是礦石運輸由海運轉陸運的關鍵節點[4],在礦石運輸中起著至關重要的作用[5]。而隨著進口礦石量的不斷增加,在不擴張碼頭規模的情況下,如何大幅度提高碼頭作業效率已成為碼頭管理者首要解決的問題。本文介紹了如何利用GPS、GIS和GPRS[6]等技術來構建礦石碼頭調度管理平臺,實現碼頭調度的可視化、智能化,從而大幅度提高其運轉效率。
二、礦石碼頭運作流程
礦石碼頭主要由泊位、堆場、裝卸船設備、水平運輸設備及堆場堆取料設備等部分組成[7]。船舶抵達碼頭泊位后,貨物一般有兩種處理流程可以選擇:一種是利用卸船機將礦石卸下,經轉接塔利用傳送帶運送,最后使用堆料機將礦石放入垛位中存儲;另一種是利用門式起重機將礦石卸下,然后利用鏟車裝入卡車后運輸到垛位中存儲。礦石在運出垛位時也有兩種方法可以選擇:一種是利用鏟車將礦石裝入卡車后運走;另一種則是利用傳送帶經漏斗裝入火車車廂,利用火車運輸。傳統的礦石碼頭調度主要依靠人工通信的方式完成,信息化程度很低,容易產生調度指令傳達慢、指令表達不清等問題,很容易造成礦石大量壓港的現象[8];并且傳統運營方式需要大量工作人員,造成了人力資源的嚴重浪費。這些問題阻礙了碼頭快速發展,影響了其運營效率的提高。
三、礦石碼頭調度系統開發
1.MapX 簡介
MapX是由MapInfo公司開發的 ActiveX控件[9],是具有快速、易用、功能強大等優點的地圖化組件。它可以使用 VB、Delphi、PowerBulider、VC++等語言進行開發,除可實現地圖的顯示、放大、縮小、漫游、選擇等基本操作外,還可實現動態圖層、圖層控制、生成用戶繪圖圖層、編輯地理對象、空間搜索等功能;對于點、線、面等對象,可作合并、緩沖區分析、相交或擦除等操作,并且具有數據鉆的功能,即允許用戶層層顯示越來越詳細的數據視圖;此外,還具有強大的數據綁定功能,可通過ODBC綁定實現數據庫中的數據與MapX中的MapInfo地圖的關系連接,使得地圖對象與關系數據庫中的數據項相對應,以實現專題圖的制作或地圖上的數據查詢,并且可以結合商業數據庫,提供各種商業分析[10]。
2.系統架構
本系統綜合使用了GIS、GPS、GPRS等技術,利用C++語言開發得到,包括了中控室礦石碼頭調度管理平臺與移動站分系統兩部分。移動站分系統包括車載控制器及車載終端兩部分。車載控制器利用GPS獲取車輛的位置,然后將位置數據分別傳送到車載終端,以及經GPRS網絡發送到計算機網絡系統中。中控室軟件平臺及數據庫服務器可從計算機網絡平臺中獲取位置信息。其中數據庫服務器中存儲的位置數據用來作歷史路徑查詢。中控室調度管理平臺則利用MapX完成車輛、軌跡等的顯示。管理者可根據地圖上顯示的車輛及垛位狀態信息合理規劃車輛的調度,并通過GPRS網絡將調度指令傳達到車載終端,并在屏幕上顯示,司機根據接收的指令進行作業。其架構如圖1所示。
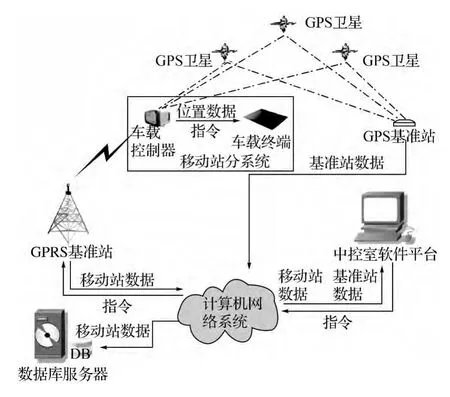
圖1 礦石碼頭調度系統架構
3.移動站分系統介紹
移動站分系統包括車載控制器及車載終端兩部分。車載控制器完成車輛定位、車輛位置數據的發送及指令的接收等功能;車載終端則完成車輛及其狀態在終端軟件中的顯示功能。
GPS的定位方法有很多種,如單點定位、相對定位、差分定位等[11],可實時獲取幾何定位坐標[12]。本文采用的差分定位中的偽距差分,其定位誤差小于0.4 m。該方法是在基準站上安置一臺GPS接收機,觀測所有衛星,根據基準站的精確坐標和各衛星的坐標,求出每顆衛星每一時刻到基準站的真實距離;再與測得的偽距比較,得出偽距改正數,將其傳輸至移動站GPS接收機,以改正測量的偽距,提高定位精度。
車載終端如圖2所示。啟動其上的終端軟件,出現如圖3所示的界面,點擊作業按鈕后出現司機登錄界面(如圖4所示),司機輸入工號后登錄即可進入等待指令界面,此時車輛用黃色圓點表示(如圖5所示)。

圖2 車載終端

圖3 終端軟件啟動界面
圖4 終端軟件登錄界面
圖5 等待指令界面
終端收到調度指令后,車輛會變成藍色,同時會在圖中將目標垛位標示出來,并用線將目標垛位與車輛連接;此時,司機需要點擊上方橘黃色按鈕來確認收到指令,確認后車輛將變為紫色圓點;車輛到達指定垛位后車輛則會用綠色圓點表示。圖6顯示了終端收到指令后車輛不同狀態的顯示。

圖6 終端收到指令后車輛不同狀態顯示
4.礦石碼頭調度管理平臺功能
該管理平臺主界面如圖7所示。根據實際操作需要本系統共有4個主要菜單,分別是調度監控、作業信息、信息查詢、屬性設置,并在其下包含多個子菜單,以滿足碼頭調度的需要。為方便用戶使用,工具欄中除了放大、縮小、平移等地圖基本視圖操作工具外,還有測距、恢復工具。測距用來測量兩點間距離;恢復工具則是用來查看地圖中對象屬性的。
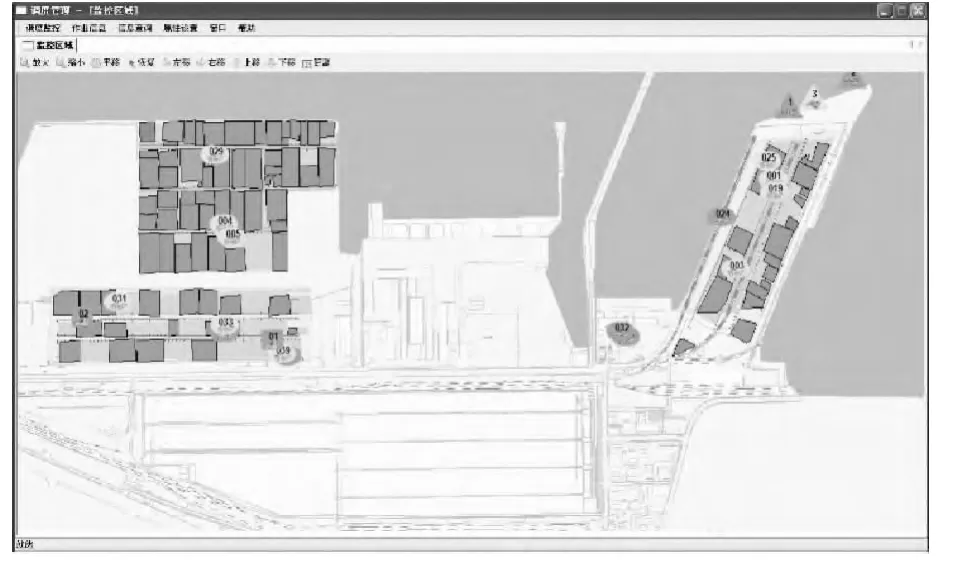
圖7 系統主界面
(1)主要功能模塊介紹
①調度監控
此模塊主要完成車輛和垛位的查找,以及車輛狀態的監控。地圖中車輛以點元素來表示,并存儲在一個圖層中,且以不同顏色表示不同狀態的車輛,如紅色表示車輛終端司機未登錄,黃色表示已登錄等待指令,淺藍色表示已發送指令但司機未確認,紫色表示司機已經確認收到的指令,綠色表示車輛已到達指定位置。垛位則以面元素來表示,并存放到一個圖層中,每一個垛位都是一個面元素,同樣設置不同顏色來表示不同狀態的垛位,如黃綠色表示該垛位無發運計劃,紅色表示有發運計劃但是車輛還未到達垛位,淺藍色表示車輛已經到達垛位。車輛及垛位的查找是通過車輛編號或垛位編號來進行的,查詢結果將在地圖中以不同顏色顯示出來,如垛位查詢結果將會以黃色來顯示,如圖8所示,標注502-E1-E2表示的是垛位編號,0+0+0表示的是車輛進入垛位的情況。
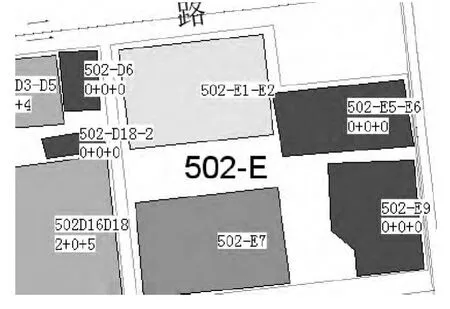
圖8 垛位查詢結果顯示
②作業信息
該模塊主要完成車輛與垛位的關聯,可以向一個垛位分配一個或幾個車輛來完成貨物的運載。為了能合理利用車輛資源,本模塊還會提供建議分配車輛、垛位的數量。其過程是當船舶靠岸后,指揮人員通過GRRS網絡將總貨物重量發送到服務器上,計算機利用該數值及每輛車輛、每個垛位的最大容量計算出理論所需車輛及垛位的數量,以供調度人員參考。此外,地圖中每個垛位上除了標注的垛位編號,還有一個數字組合“a+b+c”標注,如6+0+3。其中6代表的是已經裝貨但還未進入垛位的貨車數量,0代表的是已經進入垛位但還未過磅的貨車數量,3代表的是已經首次過磅的貨車數量。
分配完車輛后,系統會利用GPRS網絡向指定車輛發送車輛的調度信息,并且會在車輛上的GPS定位器上規劃出車輛移動的最佳路徑,以減少車輛到達目的地所需的時間,從而提高運行效率。
③信息查詢
此功能可以查看車輛的歷史軌跡,主要是通過調取存入SQL Server數據庫中的位置信息,在地圖上創建新的線圖層,然后利用MapX控件的畫線功能將軌跡在地圖上顯示出來,如圖9所示;除此之外,還可以查詢已經完成卸貨的垛位和已經分配任務的垛位。
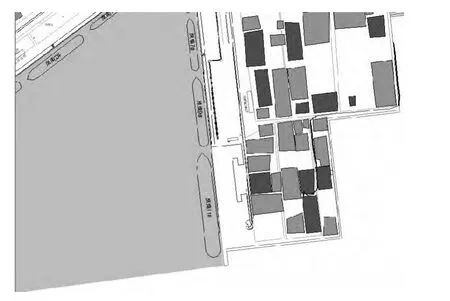
圖9 車輛軌跡查詢
④屬性設置
該模塊主要進行垛位、設備、司機及用戶的信息維護,可增減垛位,管理司機及用戶信息。
(2)平臺模塊功能總框架
平臺在4大模塊中包含了不少其他輔助功能模塊,如圖10所示。
(3)平臺工具欄功能示例
平臺將一些常用功能整合到工具欄中,以便快捷使用。以“恢復”工具為例,選擇該工具后,鼠標點擊圖中車輛圖元,會彈出車輛基本信息窗口,如圖11所示。
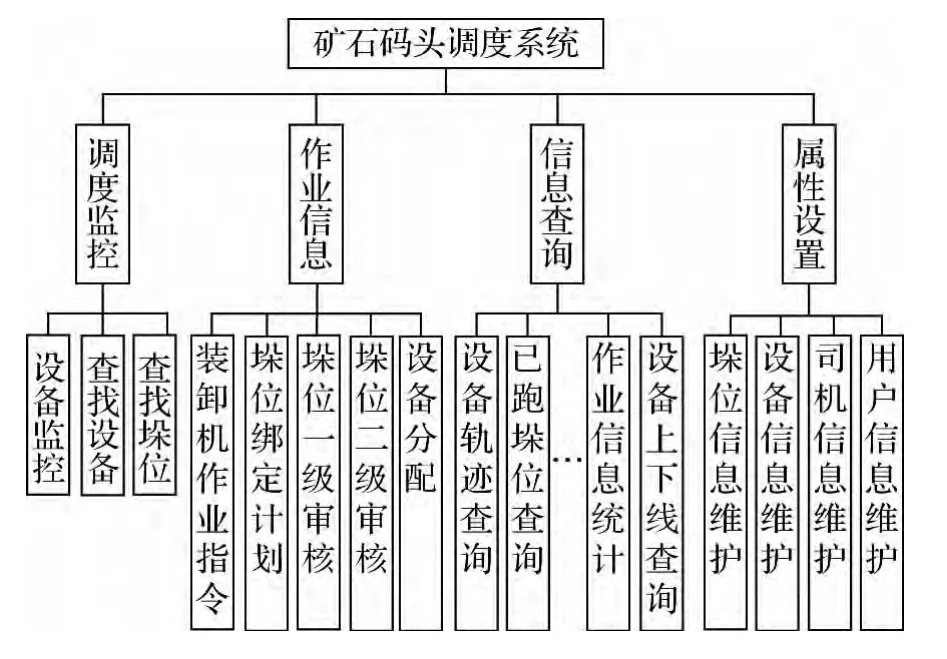
圖10 碼頭調度系統功能模塊

圖11 屬性查看
四、結束語
本系統成功地將GPS高精度定位與GIS地圖管理功能應用到礦石碼頭調度之中,以GPS獲取車輛位置,以GIS完成碼頭設備的位置及狀態監控,并利用GPRS進行系統與碼頭設備端通信,實現了對礦石碼頭的可視化監控管理、作業計劃管理、車輛合理調度、精確定位、動態跟蹤,提高了設備利用率,降低了人為出錯率,進而提高了碼頭運轉效率,節省了大量人力資源,降低了礦石碼頭運營成本,促進了我國礦石碼頭運營管理向智能化、精細化、節約型、高效型發展,對碼頭信息化管理的深入發展起到了示范作用。
[1]姜湄.大連港進口鐵礦石物流系統優化研究[D].大連:大連海事大學,2013.
[2]孫瑞娟.日照港散貨礦石碼頭物流信息系統的構建研究[D].大連:大連海事大學,2011.
[3]姚夏莉.礦石碼頭裝卸工藝系統設備配置仿真優化[D].大連:大連理工大學,2007.
[4]劉園香,周強.干散貨碼頭堆場垛位隨機動態過程與細化網格模型[J].水運工程,2012(8):67-71.
[5]楊曉旭.大宗干散貨港口裝卸作業系統集成調度模型研究[D].天津:河北工業大學,2012.
[6]翟戰強,蔡少華.基于GPRS/GPS/GIS的車輛導航與監控系統[J].測繪通報,2004(2):34-36,49.
[7]王榮明,張舒,周強.大型礦石碼頭裝卸工藝系統可靠性設計方法研究[C]∥中國土木工程學會港口工程分會技術交流文集.北京:人民交通出版社,2009:133-137.
[8]高爽.曹妃甸港礦石物流系統發展研究[D].大連:大連海事大學,2012.
[9]胡來林.MapX構件簡介及在開發GIS軟件中的運用[J].微型電腦應用,2002(5):32-35.
[10]FU Chunchang.The Secondary Development Based on MapX—GIS of Tourism Design and Implementation[J].Physics Procedia,2012,24(A):651-659.
[11]劉基余.GPS衛星導航定位原理與方法[M].北京:科學出版社,2008.
[12]唐健,戴廷煜,袁細保.RFID,GPS和GIS技術集成在物流配送系統中的應用研究[J].測繪通報,2007(10):47-49,78.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
西安航空學院學報(2014年5期)2014-07-13 01:27:52
機電信息(2014年27期)2014-02-27 15:53:56