一種基于智能手機(jī)成像的立體量測方法
2015-12-11 05:57:10徐殿成陳智勇趙雙明
測繪通報(bào) 2015年2期
徐殿成,陳智勇,趙雙明
(武漢大學(xué)遙感信息工程學(xué)院,湖北武漢430079)
一、引 言
近年來,非量測型相機(jī)越來越廣泛地應(yīng)用于近景攝影測量的各個(gè)領(lǐng)域。而智能手機(jī)的相機(jī)作為一種價(jià)格便宜、使用方便、成像效果尚佳的非量測型相機(jī),鮮有人使用它采集的影像來作立體量測。雖然手機(jī)相機(jī)使用的是定焦鏡頭,但在成像過程中不能精確設(shè)置相機(jī)主距,其自動(dòng)聚焦特性會影響到主距的大小。因此,有必要先對其成像參數(shù)的穩(wěn)定性進(jìn)行驗(yàn)證[1]。
近景攝影測量過程中常出現(xiàn)大角度、主光軸不平行等現(xiàn)象,這與航空攝影測量保持規(guī)則的豎直平行攝影有所不同。大角度帶來的影像畸變較大、左右像片姿態(tài)差別較大,從而導(dǎo)致定向角元素過大及初值計(jì)算精度不高[2-3],使用傳統(tǒng)的連續(xù)法相對定向常會出現(xiàn)迭代過程不收斂的情形,而相對定向的直接解法,不需要初值,通過像點(diǎn)坐標(biāo)即可直接解算出相對定向元素。立體像對的相對位置關(guān)系確定后,即可利用前方交會解算待求點(diǎn)的物方坐標(biāo)。
二、手機(jī)相機(jī)成像特征
1.手機(jī)相機(jī)
隨著現(xiàn)代科學(xué)技術(shù)的飛速發(fā)展,手機(jī)相機(jī)鏡頭的成像能力在逐漸提高。由于手機(jī)的整體發(fā)展趨勢是更輕更薄,無法從增大傳感器感光面積這方面來提高成像質(zhì)量,只能通過改變圖像傳感器的自身結(jié)構(gòu)來實(shí)現(xiàn)。手機(jī)相機(jī)的成像傳感器從傳統(tǒng)式CMOS到背照式CMOS再到堆棧式CMOS,成像質(zhì)量發(fā)生了質(zhì)的飛躍。市面上的主流品牌手機(jī)都相繼推出高品質(zhì)的手機(jī)相機(jī),如諾基亞、索尼、三星、蘋果等,其最高像素已達(dá)4100萬像素。
2.手機(jī)相機(jī)成像特征
由高斯成像原理(1/F=1/u+1/v),焦距F一定時(shí),物距u發(fā)生變化,像距v也相應(yīng)發(fā)生變化。相機(jī)主距f為攝影物鏡的后節(jié)點(diǎn)到像平面的垂直距離,即等于像距v。絕大部分手機(jī)都使用定焦鏡頭,僅能自動(dòng)調(diào)焦而不支持手動(dòng)調(diào)焦。成像過程中,根據(jù)不同成像距離自動(dòng)調(diào)節(jié)像距,因而主距并不固定,但是,由于手機(jī)成像感光元器件尺寸非常小,其鏡頭實(shí)際焦距也非常小(約相當(dāng)于全畫幅相機(jī)的1/8)。因而,即使在拍攝距離相當(dāng)近時(shí),物距也已遠(yuǎn)大于像距(類似于無窮大),此時(shí),像距(相機(jī)主距)可認(rèn)為近似等于焦距。
對于手機(jī)相機(jī)來說,除了主距外,像主點(diǎn)在像片中心坐標(biāo)系中的偏移量及鏡頭的光學(xué)畸變等因素,也會使量測的像點(diǎn)坐標(biāo)產(chǎn)生誤差。
3.手機(jī)相機(jī)標(biāo)定
為驗(yàn)證手機(jī)相機(jī)成像參數(shù)的穩(wěn)定性,使用筆者所在單位的室內(nèi)三維檢校場,設(shè)計(jì)了一組標(biāo)定試驗(yàn)。試驗(yàn)所采用的手機(jī)是索尼Lt26ii,該手機(jī)相機(jī)搭載了Exmor R背照式CMOS傳感器,感光元件大小為1/3.2 英寸,光圈大小為 F2.4,有效像素 1200 萬像素。
對室內(nèi)檢校場由遠(yuǎn)及近進(jìn)行拍攝,得到了6組不同距離成像時(shí)手機(jī)相機(jī)的各項(xiàng)成像參數(shù),像幅大小均為4000像素×3000像素,如圖1所示。

圖1 不同拍攝距離對手機(jī)相機(jī)成像參數(shù)進(jìn)行標(biāo)定
標(biāo)定過程中,通過半自動(dòng)提取像片上三維檢校場的標(biāo)志點(diǎn),獲取其像素坐標(biāo),而其三維坐標(biāo)已知,可基于DLT和后方交會原理[4-5],解求出相機(jī)的內(nèi)方位元素和畸變參數(shù)。得到的6組標(biāo)定結(jié)果見表1。
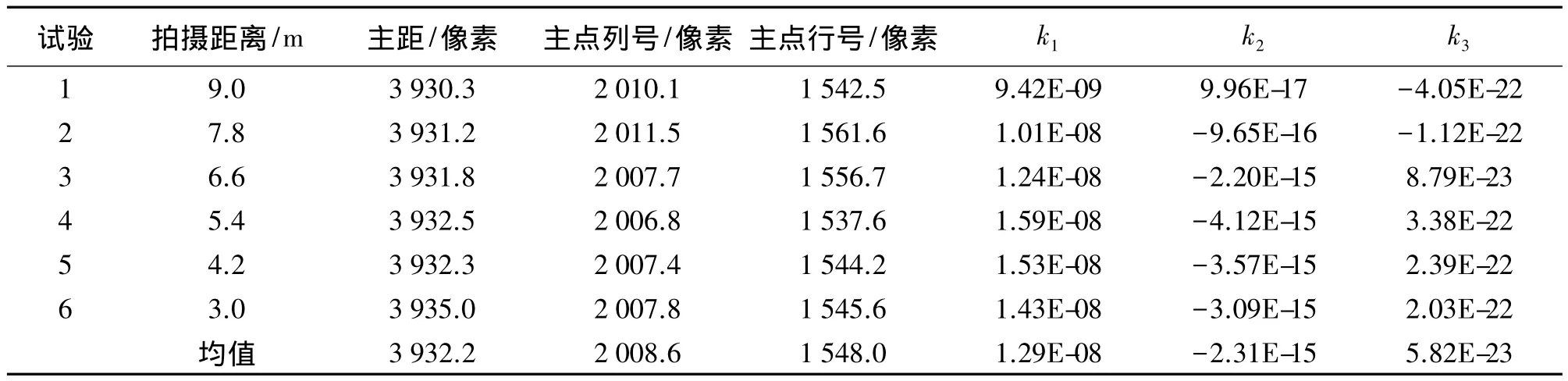
表1 不同拍攝距離獲取的手機(jī)相機(jī)成像參數(shù)
從表1中可以看出,手機(jī)相機(jī)的主距隨著拍攝距離不同而發(fā)生的變化非常小,其平均相對誤差僅0.03%。其他成像參數(shù),如像主點(diǎn)坐標(biāo)及畸變差,隨著距離的變化也是相對穩(wěn)定的。
此外,手機(jī)相機(jī)鏡頭的物理焦距一般在4 mm左右,相當(dāng)于全畫幅相機(jī)的35 mm鏡頭(等效焦距)。當(dāng)拍攝距離在3 m左右時(shí),手機(jī)成像的物距近似是像距的千倍,而全畫幅相機(jī)在此距離則不足百倍,即相對于全畫幅相機(jī)而言,手機(jī)相機(jī)的超焦點(diǎn)距離要近得多。因此,就成像清晰范圍(拍攝距離)這一指標(biāo)而言,手機(jī)相機(jī)的芯片比數(shù)碼相機(jī)有絕對的優(yōu)勢。
三、手機(jī)像對的立體量測
在分析手機(jī)成像的立體量測方法時(shí),仍選用室內(nèi)檢校場作為試驗(yàn)對象。量測過程中,僅將其標(biāo)識點(diǎn)作為待求點(diǎn),解算在自定義物方坐標(biāo)系中的坐標(biāo)值(量測值)。精度驗(yàn)證時(shí),將標(biāo)識點(diǎn)在檢校場局部坐標(biāo)系中的坐標(biāo)值視作真值,以進(jìn)行比較分析。將采集的左、右像片構(gòu)成單獨(dú)像對,按下述方法實(shí)現(xiàn)立體量測。
1.影像的畸變校正
鏡頭的光學(xué)畸變使所量測的像點(diǎn)坐標(biāo)會產(chǎn)生誤差,因此須先對其進(jìn)行校正[6]。由檢校得出了相機(jī)的內(nèi)方位元素(x0,y0,f)和畸變參數(shù) k1、k2、k3,對手機(jī)相機(jī)采集的像對進(jìn)行畸變矯正(只考慮徑向畸變),當(dāng)像平面坐標(biāo)為(x,y)時(shí),數(shù)碼相機(jī)的畸變差可以表示為

其中,dx、dy為畸變差,與像平面坐標(biāo)和徑向距離r有關(guān);r=(x-x0)2+(y-y0)2。經(jīng)畸變校正之后,手機(jī)影像的幾何畸變殘差小于0.5像素。
2.相對定向直接解
相對定向的目的是為了恢復(fù)構(gòu)成立體像對的兩張像片的相對方位,建立被攝物體的幾何模型,從而使同名光線對對相交[7]。當(dāng)傾斜攝影中的傾角近似值或影像的內(nèi)方位元素未知時(shí),須采用相對定向的直接解法[8]。
立體像對相對定向的數(shù)學(xué)模型是相應(yīng)的攝影光線與基線應(yīng)滿足共面條件
相對定向中假定左方影像是水平的,其外方位元素均視作零值。左片的像空間坐標(biāo)為(x,y,-f),由于旋轉(zhuǎn)矩陣為單位陣,可直接得到左片像空間輔助坐標(biāo)(u,v,w)。而由相對定向得到的角元素(φ,ω,κ)構(gòu)成了右片相對于左片的旋轉(zhuǎn)矩陣R'。右片的像空間坐標(biāo)(x',y',-f'),可通過轉(zhuǎn)換得到其像空間輔助坐標(biāo)(u',v',w')。
將式(2)展開,整理得


等式兩邊除以L5,得

在參數(shù)解算過程中,由于旋轉(zhuǎn)矩陣R'本身是一個(gè)正交矩陣,它的9個(gè)元素滿足正交矩陣特有的一系列函數(shù)關(guān)系,因此可將這些關(guān)系式代入式(4)進(jìn)行消元、變形,并最終得到計(jì)算基線分量和旋轉(zhuǎn)矩陣R'的公式[3],進(jìn)而反算出相對定向的3個(gè)角元素。
3.前方交會
在大傾角的近景攝影測量中,由于上下視差與左右視差同時(shí)存在,點(diǎn)投影系數(shù)法已不夠嚴(yán)密。利用前方交會的嚴(yán)密解法[9],將共線條件方程整理可得
由相對定向元素和同名像點(diǎn)坐標(biāo),依式(5)可以解算出各待定點(diǎn)的物方坐標(biāo)。
4.立體像對的光束法平差
通過相對定向可確定立體像對的相對位置關(guān)系,得到右片相對于左片的外方位元素;利用空間前方交會,得到待求點(diǎn)的物方坐標(biāo)。但為了提高量測精度,可進(jìn)一步作單獨(dú)像對的光束法平差[10]。
平差過程中,將同名點(diǎn)的像點(diǎn)坐標(biāo)(x,y)作為觀測值,外方位元素(XS,YS,ZS,φ,ω,κ)和待求點(diǎn)的物方坐標(biāo)(X,Y,Z)都作為未知數(shù),通過前面獲取的相對定向元素和物方坐標(biāo)為其提供初值,解求各未知數(shù)的改正數(shù),以優(yōu)化相對定向結(jié)果和待求點(diǎn)的物方空間坐標(biāo)。光束法誤差方程式可簡單表示為

在確定模型系數(shù)前,該平差過程都是基于相對定向的,基線分量BX視作定值,其改正數(shù)為零。因?yàn)闆]有控制點(diǎn),且內(nèi)方位元素由標(biāo)定過程確定,故誤差方程中各系數(shù)陣為
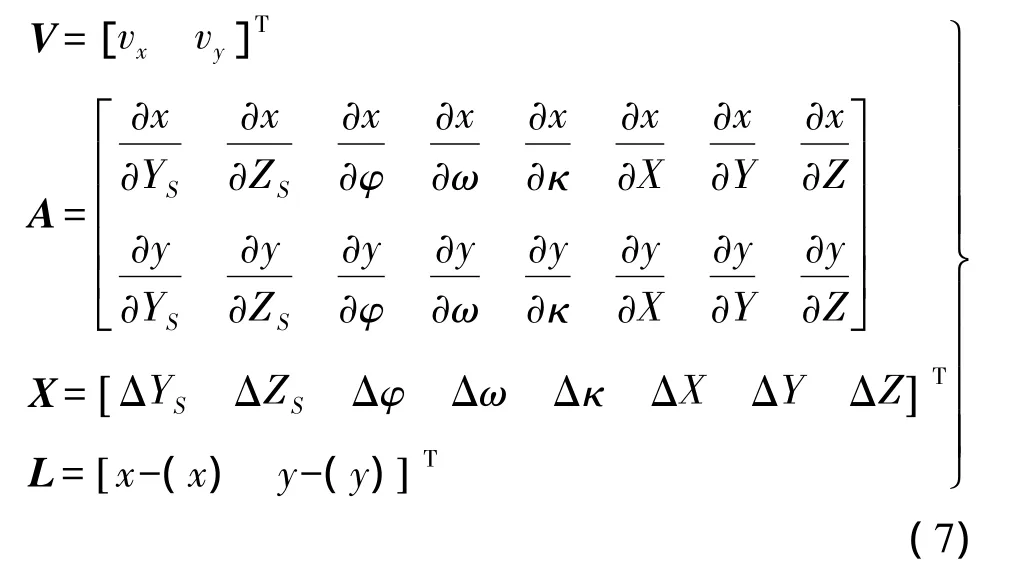
在左右像片上取n對同名像點(diǎn),可列4n個(gè)方程,解算3n+5個(gè)未知數(shù)(5個(gè)相對定向元素和n個(gè)同名像點(diǎn)的物方坐標(biāo))的改正數(shù),由此可知誤差方程式各矩陣階數(shù)是 V4n×1、A4n×(3n+5)、X(3n+5)×1、L4n×1,其法方程未知數(shù)系數(shù)矩陣的結(jié)構(gòu)如圖2所示。

圖2 法方程式未知數(shù)系數(shù)矩陣
為了確定模型系數(shù),任意選取立體像對中的兩個(gè)標(biāo)識點(diǎn)。計(jì)算這兩點(diǎn)在自定義物方坐標(biāo)系中的距離S1及其在檢校場局部坐標(biāo)系中的距離S2,這兩個(gè)距離的比值S2/S1即為模型比例系數(shù),利用該系數(shù),修正標(biāo)識點(diǎn)在自定義物方坐標(biāo)系中的坐標(biāo)值。此時(shí),各個(gè)標(biāo)識點(diǎn)在自定義物方坐標(biāo)系和檢校場局部坐標(biāo)系中的三維坐標(biāo),雖數(shù)值大小不同,但尺度大小完全相同。
四、試驗(yàn)分析
通過手機(jī)相機(jī)采集的左、右像片構(gòu)成立體像對,選取數(shù)目適量、分布均勻的同名像點(diǎn)(均為檢校場的標(biāo)識點(diǎn)),圖3所示為第一組試驗(yàn)。
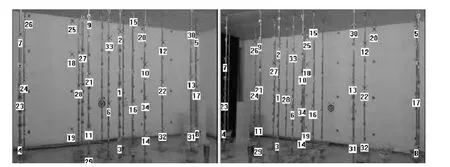
圖3 手機(jī)像對立體量測過程中選取的同名點(diǎn)
試驗(yàn)計(jì)算過程中,相對定向直接解得到相對定向元素(即右片相對于左片的外方位元素),前方交會得到了標(biāo)識點(diǎn)的物方坐標(biāo)。為提高量測精度,將相對定向元素和物方坐標(biāo)作為初值,進(jìn)行光束法平差,并確定了模型系數(shù)。表2中列出了兩組試驗(yàn)(不同的立體像對)相對定向直接解法的外方位元素和光束法平差優(yōu)化后的外方位元素。

表2 光束法平差前后右片相對于左片的外方位元素
經(jīng)過光束法平差及模型系數(shù)解算后,各標(biāo)識點(diǎn)在自定義物方坐標(biāo)系和檢校場局部坐標(biāo)系中有尺度大小相同的三維坐標(biāo),即任意兩標(biāo)識點(diǎn)在自定義物方坐標(biāo)系中的距離與它們在檢校場局部坐標(biāo)系中的距離是相等的。因此,可以利用點(diǎn)與點(diǎn)之間的距離來分析測量精度,避免坐標(biāo)轉(zhuǎn)換帶來的中間誤差。
選取其中一個(gè)標(biāo)識點(diǎn)作為基點(diǎn),計(jì)算其他標(biāo)識點(diǎn)到基點(diǎn)的距離。在自定義物方坐標(biāo)系中,該距離為量測值,記為 di(i=1,2,…,n-1)。在檢校場局部坐標(biāo)系中,該距離為真實(shí)值,記為d'i(i=1,2,…,n-1)。統(tǒng)計(jì)各個(gè)量測值與真實(shí)值的差值Δdi(i=1,2,…,n-1),并通過其各項(xiàng)指標(biāo)來分析手機(jī)相機(jī)的量測精度,見表3。
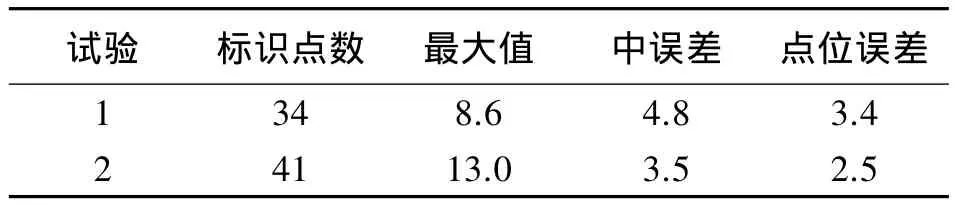
表3 量測值與真實(shí)值差值Δdi的各項(xiàng)精度指標(biāo) mm
由以上兩組結(jié)果可以看出,不論是距離Δdi的中誤差還是點(diǎn)位誤差,都表明手機(jī)的測量精度足夠用于某些不需要很高精度的攝影測量工作。
五、結(jié)束語
本次試驗(yàn)是首次嘗試使用手機(jī)相機(jī)這種非量測相機(jī)來實(shí)現(xiàn)立體量測功能,從試驗(yàn)結(jié)果可以得出如下結(jié)論:①常規(guī)成像距離范圍內(nèi),手機(jī)相機(jī)雖然有自動(dòng)聚焦功能,但其成像參數(shù)相對穩(wěn)定,且小芯片在近景攝影測量中具有優(yōu)勢;②相對定向直接解法,克服了大傾角且無控制點(diǎn)的場景,不需要設(shè)定初值,回避了傳統(tǒng)相對定向方法中的迭代過程,直接有效地解算出了像對的相對位置關(guān)系;③利用光束法平差,優(yōu)化了相對定向結(jié)果,提高了待求點(diǎn)的物方坐標(biāo)的精度;④利用檢校場控制點(diǎn)的坐標(biāo)真值,通過距離的差值間接分析了手機(jī)相機(jī)的量測精度,滿足測量要求。總之,即使手機(jī)相機(jī)測量的誤差和專業(yè)測量相機(jī)相比仍顯得比較大,但其具有攜帶方便、使用簡單,且成像質(zhì)量較好的優(yōu)勢,在某些攝影測量應(yīng)用中仍然是取代數(shù)碼相機(jī)完成攝影測量任務(wù)的較好選擇。
[1]張本昀,吳曉明,喻錚錚,等.非量測型相機(jī)檢校及可靠性研究[J].測繪科學(xué),2008,33(4):84-86 .
[2]楊立君,馬明棟,苗立志.非量測相機(jī)近景數(shù)字影像相對定向方法研究[J].大地測量與地球動(dòng)力學(xué),2012,32(4):135-138.
[3]陳義,陸玨,鄭波.近景攝影測量中大角度問題的探討[J].測繪學(xué)報(bào),2008,37(4):458-463.
[4]佟書泉,王東,任忠成,等.基于二維DLT方法的普通數(shù)碼相機(jī)檢校[J].測繪通報(bào),2007(9):14-16.
[5]王冬,馮文灝,盧秀山,等.基于多片空間后方交會的CCD 相機(jī)檢校[J].測繪科學(xué),2008(4):64-66.
[6]李天子,郭輝.非量測數(shù)碼相機(jī)的影像糾正[J].測繪通報(bào),2006(10):59-61.
[7]張永軍,張勇.大重疊度影像的相對定向與前方交會精度分析[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2005,30(2):126-130.
[8]張祖勛,張劍清.數(shù)字?jǐn)z影測量學(xué)[M].武漢:武漢大學(xué)出版社,2012.
[9]張劍清,潘勵(lì),王樹根.攝影測量學(xué)[M].武漢:武漢大學(xué)出版社,2012.
[10]馮文灝.近景攝影測量——物體外形與運(yùn)動(dòng)狀態(tài)的攝影法測定[M].武漢:武漢大學(xué)出版社,2002.