BDS實(shí)時(shí)動(dòng)態(tài)相對(duì)定位卡爾曼濾波算法
2015-12-11 05:57:38韓永亮
測(cè)繪通報(bào) 2015年5期
李 勝,韓永亮
(遼寧工程技術(shù)大學(xué),遼寧阜新123000)
一、引 言
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System,BDS)是中國(guó)正在實(shí)施的自主發(fā)展、獨(dú)立運(yùn)行的全球衛(wèi)星導(dǎo)航系統(tǒng),其空間段包括5顆靜止軌道衛(wèi)星(geostationary earth orbit satellites,GEO)和 30 顆非靜止軌道衛(wèi)星(inclined geosynchronous satellite orbit,IGSO 和medium earth orbit satellites,MEO)。目前,在軌衛(wèi)星14顆,其中GEO衛(wèi)星5顆、IGSO衛(wèi)星5顆、MEO衛(wèi)星4顆,實(shí)現(xiàn)了亞太區(qū)域的定位、導(dǎo)航和授時(shí)及短報(bào)文通信服務(wù);根據(jù)系統(tǒng)建設(shè)總體規(guī)劃,2020年前后,建成覆蓋全球的北斗衛(wèi)星導(dǎo)航系統(tǒng)[1-2]。由于BDS已經(jīng)形成了區(qū)域覆蓋,因此BDS實(shí)時(shí)動(dòng)態(tài)相對(duì)定位與導(dǎo)航的算法和精度成為當(dāng)前關(guān)注的熱點(diǎn)。
目前GPS實(shí)時(shí)動(dòng)態(tài)相對(duì)定位算法比較成熟,得到了廣泛的應(yīng)用,其方法主要是含有位置參數(shù)、速度和加速度參數(shù),以及整周模糊度參數(shù)的濾波,濾波過程中用上一次歷元的位置、速度和加速度參數(shù)和方差通過一步轉(zhuǎn)移矩陣預(yù)測(cè)當(dāng)前歷元相應(yīng)的位置、速度和加速度狀態(tài)向量和方差,實(shí)現(xiàn)模糊度快速固定和精確位置計(jì)算[3-6]。BDS與GPS采用相同的CDMA編碼和廣播星歷樣式,并具有固定的頻率,因此兩系統(tǒng)的定位原理應(yīng)當(dāng)相同,當(dāng)前BDS動(dòng)態(tài)定位基本采用GPS動(dòng)態(tài)定位算法,沒有充分考慮BDS的當(dāng)前狀況。目前BDS在軌衛(wèi)星數(shù)較少,主要是GEO和IGSO衛(wèi)星,GEO衛(wèi)星相對(duì)于地球靜止,衛(wèi)星軌道相對(duì)于地球基本固定不變,IGSO衛(wèi)星的運(yùn)動(dòng)周期約為24 h,測(cè)站觀測(cè)到北斗衛(wèi)星的幾何構(gòu)型變化較慢,歷元間的相關(guān)性較強(qiáng),因此采用相同的濾波算法,BDS初始化時(shí)間明顯長(zhǎng)于GPS。而本文提出了一種用偽距定位結(jié)果和方差陣作為位置預(yù)測(cè)值和方差陣,替換了常規(guī)的速度和加速度卡爾曼濾波中的一步轉(zhuǎn)移過程,減少了濾波狀態(tài)參數(shù)數(shù)量,縮短濾波初始化時(shí)間,濾波得到雙差模糊度浮點(diǎn)解和方差陣后,結(jié)合MLAMBDA方法[7-10]實(shí)時(shí)搜索固定雙差模糊度,進(jìn)而得到精確的位置固定解。此濾波算法使用偽距和載波同時(shí)濾波,適用于單頻或雙頻定位,最后基于該算法對(duì)實(shí)測(cè)的BDS數(shù)據(jù)試驗(yàn)進(jìn)行分析,得出了BDS單頻(B1)和雙頻(B1、B2)定位精度,并對(duì)GEO和IGSO衛(wèi)星的相位差分殘差值進(jìn)行分析。
二、相對(duì)定位觀測(cè)方程
相對(duì)定位一般采用站間、星間差分,站間差分消除了衛(wèi)星鐘差,而星間差分消除了接收機(jī)鐘差,并且由于基線距離較短,站間、星間差分有效地削弱了空間相關(guān)誤差(電離層延遲,對(duì)流層延遲,星歷誤差等)的影響,忽略多路徑的影響。其觀測(cè)方程表示如下


三、實(shí)時(shí)動(dòng)態(tài)相對(duì)定位卡爾曼濾波
1.濾波模型
通過站間、星間差分技術(shù)消除了衛(wèi)星和接收機(jī)鐘差,有效地削弱了空間相關(guān)誤差(電離層延遲、對(duì)流層延遲及星歷誤差等)的影響,忽略其殘差影響,因此相對(duì)定位觀測(cè)方程中只包含位置和整周模糊度未知數(shù)。常規(guī)動(dòng)態(tài)定位通常采用加速度的濾波模型,狀態(tài)向量包括位置、速度、加速度,以及整周模糊度,其狀態(tài)方程用上一次歷元的位置、速度及加速度狀態(tài)參數(shù)預(yù)測(cè)當(dāng)前歷元的位置、速度及加速度狀態(tài)參數(shù)。為了減少狀態(tài)向量的個(gè)數(shù),實(shí)現(xiàn)BDS濾波的快速收斂,將常規(guī)的濾波算法中速度和加速度狀態(tài)向量去掉,濾波過程中采用偽距單點(diǎn)定位結(jié)果預(yù)測(cè)當(dāng)前歷元的位置向量,相應(yīng)的方差陣為預(yù)測(cè)位置向量的誤差方差陣,因此狀態(tài)向量只包含位置和雙差模糊度狀態(tài)參數(shù),避免了濾波的發(fā)散。此算法適用于單頻觀測(cè)數(shù)據(jù)或雙頻觀測(cè)數(shù)據(jù)同時(shí)濾波,為了表示方便,以下僅針對(duì)B1、C展開,離散系統(tǒng)的卡爾曼濾波方程可以表示為

式中,狀態(tài)向量為

常數(shù)向量為

系數(shù)矩陣為
觀測(cè)噪聲陣為
式中,i為參考衛(wèi)星;n為非參考衛(wèi)星數(shù);ε為相位觀測(cè)噪聲;γ為偽距與相位精度比;l、m、n為初始位置偏導(dǎo);σX、σY、σZ為偽距定位方差;σXY、σXZ、σYZ為偽距定位協(xié)方差;ΔΔN前后歷元不變,假定為零均值白噪聲。
2.第k歷元濾波過程
濾波過程中采用偽距單點(diǎn)定位結(jié)果預(yù)測(cè)當(dāng)前歷元的位置向量,用第k歷元偽距定位結(jié)果[x,y,z]k預(yù)測(cè)位置參數(shù),相應(yīng)的方差陣為預(yù)測(cè)位置向量的方差陣,即用 k 歷元偽距定位方差陣 P[x,y,z],k、k-1 歷元整周模糊度的濾波方差陣Pk-1和過程噪聲陣Qk計(jì)算 k歷元預(yù)測(cè)方差陣 Pk,k-1
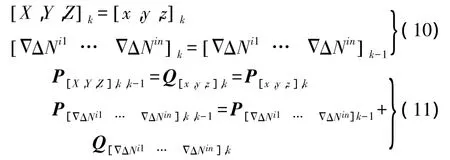
計(jì)算濾波增益陣Kk和改正數(shù)Vk,修正第k歷元預(yù)測(cè)值得到卡爾曼濾波解為
采用上述濾波算法短基線時(shí)僅需一個(gè)歷元即可正確固定整周模糊度,縮短了動(dòng)態(tài)相對(duì)定位的初始化時(shí)間,濾波過程中有新生衛(wèi)星升起或發(fā)生周跳,此時(shí)重新初始化模糊度,一般只需一個(gè)歷元重新固定模糊度。
四、試驗(yàn)與分析
采用實(shí)測(cè)的BDS數(shù)據(jù)進(jìn)行仿真動(dòng)態(tài)試驗(yàn),時(shí)間為2013年9月20日8:00—12:00,地點(diǎn)為北京已知坐標(biāo)觀測(cè)站,基線長(zhǎng)5.6 km,采樣間隔為30 s。數(shù)據(jù)處理采用上述濾波算法進(jìn)行B1和C的單頻定位試驗(yàn),再用B1、B2和C、P2進(jìn)行雙頻定位試驗(yàn),衛(wèi)星截止高度角15°,并對(duì)定位中誤差和GEO、IGSO衛(wèi)星殘差進(jìn)行分析。
1.BDS動(dòng)態(tài)相對(duì)定位結(jié)果
采用上述濾波算法僅需一個(gè)歷元實(shí)現(xiàn)模糊度固定,圖1和圖2給出了試驗(yàn)數(shù)據(jù)單頻和雙頻動(dòng)態(tài)定位處理的結(jié)果,其中圖1中單頻定位精度平面E方向優(yōu)于1.2 cm,N 方向優(yōu)于3 cm,U 方向優(yōu)于5.3 cm,點(diǎn)位中誤差平均約為0.8 cm;圖2中雙頻定位精度好于單頻定位主要是 N和 U方向,E方向優(yōu)于1 cm,N 方向優(yōu)于2.6 cm,U 方向優(yōu)于4.5 cm,中誤差平均約為0.5 cm。E方向精度好于N方向主要是由衛(wèi)星分布引起的,其中GEO和IGSO衛(wèi)星主要分布于測(cè)站南側(cè),而東西方向比較均勻。單頻或雙頻解算中誤差在 8.8~9.5 h 階段逐漸變大,并在 9.5 h 出現(xiàn)明顯的跳變,因此對(duì)衛(wèi)星殘差進(jìn)行分析,跳變?cè)驅(qū)⒃谙乱还?jié)詳細(xì)分析。
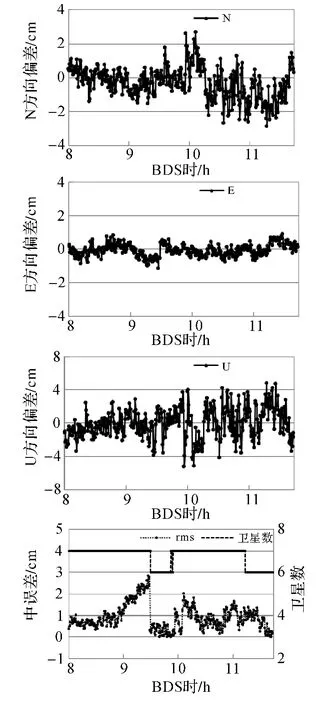
圖1 單頻相對(duì)定位結(jié)果
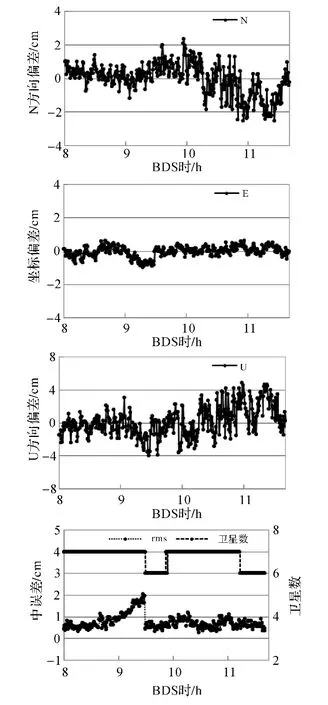
圖2 雙頻相對(duì)定位結(jié)果
2.GEO和IGSO衛(wèi)星相位差分殘差
BDS系統(tǒng)含有 GEO、IGSO和 MEO衛(wèi)星,GEO衛(wèi)星相對(duì)地球位置不變,IGSO和MEO衛(wèi)星相對(duì)地球作固定周期和軌道運(yùn)行,因此測(cè)站坐標(biāo)已知并且模糊度固定后對(duì)GEO衛(wèi)星和IGSO衛(wèi)星殘差進(jìn)行分析,計(jì)算相位站間、星間差分殘差值(雙差相位值和幾何距離差值),并選了 4顆衛(wèi)星 PRN1、PRN4、PRN7和PRN10進(jìn)行詳細(xì)分析。圖1和圖2中定位中誤差在8.8~9.5 h 階段逐漸變大并在9.5 h 出現(xiàn)了峰值,且衛(wèi)星數(shù)相應(yīng)地由7顆變?yōu)?顆,因此中誤差逐步變大應(yīng)該是9.5時(shí)不參與解算衛(wèi)星的殘差逐步增大引起的。
圖3顯示的PRN1和PRN4為GEO衛(wèi)星,相位差分殘差值比較平穩(wěn),但B1和B2殘差值之間存在系統(tǒng)性偏差,PRN1的B1和B2殘差值系統(tǒng)差較小,約為0.5 cm,而PRN4的系統(tǒng)差較大,約為1 cm,主要原因是GEO衛(wèi)星的位置相對(duì)于測(cè)站基本保持不變,觀測(cè)環(huán)境保持不變,B1和B2頻率造成的電離層延遲差異導(dǎo)致了系統(tǒng)性偏差;而PRN7和PRN10為IGSO衛(wèi)星,相對(duì)測(cè)站位置高度角實(shí)時(shí)變化,信號(hào)傳播路徑發(fā)生變化,相位差分殘差值B1和B2互相交互,隨著高度角變小而變大,如22°時(shí)PRN7殘差值為4.5 cm,上述BDS 動(dòng)態(tài)定位中誤差值8.8~9.5 h 階段逐漸變大并在9.5 h出現(xiàn)了峰值就是由于PRN7號(hào)衛(wèi)星引起的,9.5 h后PRN7號(hào)衛(wèi)星不再參與定位解算,因此中誤差急劇變小。
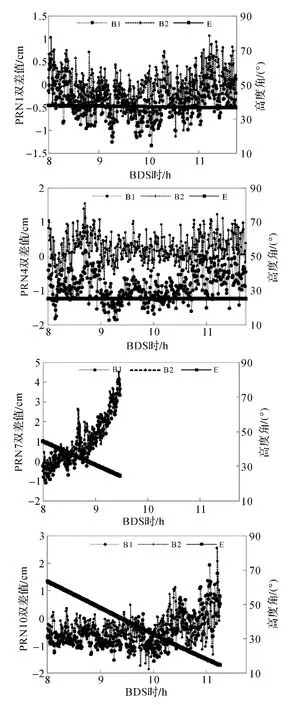
圖3 B1和B2差分殘差值
五、結(jié) 論
本文提出了一種適用于BDS的單頻或雙頻實(shí)時(shí)動(dòng)態(tài)定位的濾波算法,用實(shí)測(cè)的BDS數(shù)據(jù)驗(yàn)證、分析了BDS單頻和雙頻相位觀測(cè)值的定位精度,并對(duì)GEO、IGSO衛(wèi)星相位差分殘差值進(jìn)行了分析說明,結(jié)論主要如下:
1)采用上述動(dòng)態(tài)定位算法實(shí)現(xiàn)單頻相對(duì)定位E方向優(yōu)于1.2 cm,N方向優(yōu)于3 cm;雙頻相對(duì)定位E方向優(yōu)于1 cm,N方向優(yōu)于2.6 cm。
2)BDS定位E方向好于N方向,原因主要是由于衛(wèi)星分布集中于測(cè)站的南側(cè),相位差分殘差值在N方向不能有效地削弱引起的。
3)GEO衛(wèi)星相位差分殘差值比較平穩(wěn),但B1和B2差分殘差值之間存在電離層延遲引起的系統(tǒng)性偏差;IGSO衛(wèi)星相位差分殘差隨著高度角變小而變大。
[1]中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室.北斗衛(wèi)星導(dǎo)航系統(tǒng)發(fā)展報(bào)告(2.0 版)[R].北京:[s.n.],2013.
[2]GAO Z Z,ZHANG H P,HU Z G,et al.Performance Analysis of BeiDou Satellite Navigation System(4IGSO+3GEO)in Standard Positioning and Navigation[C]∥SUN J D,LIU J N,YANG Y X,et al.China Satellite Navigation Conference(CSNC)2012 Proceedings Lecture Notes in Electrical Engineering Volume 159.Berlin Heidelberg:Springer,2012:177-186.
[3]徐彥田,程鵬飛,蔡艷輝,等.估計(jì)對(duì)流層延遲的單頻RTK卡爾曼濾波算法[J].測(cè)繪通報(bào),2012(8):4-6.
[4]YU W K,DAI W J,DING X L,et al.Stochastic Model of GPS/BD Combined Standard Single Point Positioning[C]∥SUN J D,LIU J N,YANG Y X,et al.China Satellite Navigation Conference(CSNC)2012 Proceedings Lecture Notes in Electrical Engineering Volume 159.Berlin Heidelberg:Springer,2012:325-334.
[5]霍夫曼-韋倫霍夫,利希特內(nèi)格爾,瓦斯勒.全球衛(wèi)星導(dǎo)航系統(tǒng) GPS,GLONASS,Galileo及其他系統(tǒng)[M].程鵬飛,蔡艷輝,文漢江,等,譯.北京:測(cè)繪出版社,2009:100-120.
[6]徐彥田,程鵬飛,蔡艷輝.中長(zhǎng)基線單基準(zhǔn)站動(dòng)態(tài)定位卡爾曼濾波算法研究[J].西南交通大學(xué)學(xué)報(bào),2013,48(2):317-322.
[7]LI C X,LIU W M.Effective GPS Positioning Algorithm with New Fast Integer Ambiguity Resolution and Kalman Filter Model[J].Journal of Convergence Information Technology,2012,7(9):253-260.
[8]TEUNISSEN P J G.The Least-squares Ambiguity Decorrelation Adjustment:A Method for Fast GPS Integer Ambiguity Estimation[J].Journal of Geodesy,1995,70(1-2):65-82.
[9]CHANG X W,YANG X,ZHOU T.MLAMBDA:A Modified LAMBDA Method for Integer Least-Squares Estimation[J].Journal of Geodesy,2005,79(9):552-565.
[10]劉志平,何秀鳳,郭廣禮,等.GNSS模糊度降相關(guān)算法及其評(píng)價(jià)指標(biāo)研究[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2011,36(3):257-261.
- 測(cè)繪通報(bào)的其它文章
- “數(shù)字城市”中三維模型數(shù)據(jù)的建設(shè)與應(yīng)用
- 利用新技術(shù)打造現(xiàn)代化測(cè)繪公共服務(wù)平臺(tái)——Trimble VRS解決方案助力甘肅省衛(wèi)星定位連續(xù)運(yùn)行基準(zhǔn)站網(wǎng)建設(shè)
- 徠卡D810 touch在古建筑測(cè)繪中的應(yīng)用
- 通過拓展體驗(yàn)教學(xué)優(yōu)化測(cè)繪學(xué)生團(tuán)隊(duì)作業(yè)素質(zhì)的探索
- 地理信息產(chǎn)業(yè)創(chuàng)新能力指標(biāo)體系的設(shè)計(jì)與分析
- 浙中城市群地理空間框架建設(shè)模式及關(guān)鍵技術(shù)研究