大側向加速度下汽車駕駛員建模研究
2015-12-07 02:54:06閆曉曉楊建森黃森仁
重慶理工大學學報(自然科學) 2015年4期
閆曉曉,楊建森,黃森仁,李 飛
(中國汽車技術研究中心,天津 300300)
經研究發現,駕駛員的行為特性是影響汽車主動安全性的重要因素。建立能準確反映客觀實際情況的駕駛員模型對車輛操縱穩定性以及主動安全性研究有著至關重要的作用。線性駕駛員模型在線性區內能夠較好地跟蹤路徑軌跡,但在大側向加速度下該模型就無法準確地跟蹤路徑軌跡[1]。本研究在基于“預瞄-跟隨”理論的駕駛員模型的基礎上,對大側向加速度下的駕駛員模型提出了修正,明顯改善了大側向加速度下駕駛員模型的路徑軌跡跟蹤效果。
1 線性區駕駛員模型
基于“預瞄-跟隨”理論的駕駛員模型[1-3],根據預期道路和預期道路上的車速信息,通過引入汽車姿態和速度信息的反饋,計算出駕駛員所需要施加到汽車上的油門開度和方向盤轉角。駕駛員模型描述如圖1所示。

圖1 駕駛員模型描述
1.1 駕駛員預期道路與車速描述
駕駛員模型的輸入為“預期車速”和“預期道路”。為了可以統一表示“預期車速”和“預期道路”,可以采用離散的數表方法,而不使用數學公式來描述(圖2和表1)。可以用“大地坐標系”中道路中心線上的一系列有序的點來描述駕駛員預期的軌跡。鑒于在道路上還有預期行駛車速的要求,道路中心線上的一系列點除了含有位置特性外,還需要含有駕駛員期望的速度特性。因此,所有點可用(Xi,Yi,Ui)來表達,其中:(Xi,Yi)描述了駕駛員需要跟蹤的期望道路中心線坐標;Ui描述了在(Xi,Yi)位置時駕駛員期望到達的車速。i=1為道路的起始點,i=n為道路的終結點。在道路的曲率比較小時,表示道路的點應取得稀疏一些;當道路的曲率變得較大時,也就是在比較急的彎道上,表示道路的點需要取得緊密一些[2]。通過以上輸入,本研究所建駕駛員模型可確定合適的油門開度~α和方向盤轉角δsw,使車輛的真實輸出能跟隨駕駛員期望的速度和道路軌道。

圖2 預期道路和預期車速的描述

表1 駕駛員模型的預期道路與車速
1.2 基于加速度反饋的方向控制駕駛員模型
該駕駛員模型分為2部分:一部分是決策統一油門的縱向控制駕駛員模型;一部分是決策方向盤轉角的方向控制駕駛員模型。方向控制駕駛員模型是基于加速度反饋的,模型的輸入包括汽車的狀態反饋和駕駛員預瞄前方點的軌跡。這些輸入經過加速度反饋環節、反應滯后環節和神經滯后環節后,得到駕駛員模型輸出的方向盤轉角。基于側向加速度反饋的方向控制駕駛員模型如圖3 所示[3]。

圖3 基于側向加速度反饋的方向控制駕駛員模型
模型中的側向加速度對方向盤轉角的增益可以通過線性二自由度車輛模型在線性區內的關系公式進行辨識,如式(1)所示。

1.3 任意道路下預瞄點搜索算法
在任意道路下建立基于側向加速度反饋的方向控制駕駛員模型時,需要在車輛行駛的任意位置下得到在車輛坐標系下預瞄點與汽車的側向偏差 Δfp。
如圖4所示,期望的道路軌跡可以用絕對坐標系中道路中心線上的一組坐標點來描述。(X(i),Y(i))代表絕對坐標中道路中心線上第i個點的坐標,(x(i),y(i))代表上述點在車輛坐標系中的坐標。兩者可以利用如下的坐標變換進行換算:

其中:ψ表示為在大地坐標系下汽車的航向角;i表示第i點。

圖4 任意道路下的預瞄點搜索算法
假設汽車的當前位置在大地坐標系中的坐標為(X0,Y0)。要計算得到當前Δfp的數值應經過2步:第1步,在描述期望路徑的表格中找出在車輛當前位置后面最近的點,用來作為下一次搜索的起點;第2步,需要確定2個點,這2個點把預瞄點夾在中間,然后利用線性插值計算預瞄點坐標[4]。
假設s0為上次搜索所設置的當前這次搜索的起始點。本研究假設車速始終是正值(暫時不考慮倒車工況),則x(s0)一定是負值。從s0點開始,在期望路徑的數表中尋找到一個能夠滿足式(3)的點。

其中s是數表中滿足上述公式條件的點,則該點即是車輛當前位置后面的最近點,并且將該點儲存為下一次搜索的起始點。
下一步查找一個期望軌跡中在預瞄點后面的最近的點,要求其滿足式(4)。

式中m是數表中滿足上述公式條件的點。那么,預瞄點P的位置認定是在點m和點m+1之間。因此Δfp可以通過點m與點m+1在車輛坐標系中線性插值的方法計算得出,見式(5)。

以上所述為一次搜索的全過程。當車輛運動至另一個新的位置時,需要更新搜索起始點和車輛的位置,繼續完成新一次的搜索,從而更新Δfp。
1.4 任意車速和道路跟隨駕駛員模型
在建立縱向控制駕駛員模型時,通過導入縱向加速度的反饋因素,并通過PID控制策略決策理想油門開度,公式表達為:

其中Kp,Kd和Ki為PID控制策略中的重要參數。這3個參數需在計算時作調整,但PID控制一般會具備很強的魯棒性,在取值范圍較大時也能夠使控制模型獲得良好的收斂效果。
把任意的道路跟隨控制和速度跟隨控制進行綜合,形成如圖5所示的任意速度和道路跟隨控制的駕駛員模型。需要特別注意的是,速度控制和方向控制的主要耦合作用是來自車速對側向車輛動力學特性的影響。除此之外兩者的耦合作用是非常小的,基本可以理解為是解耦的[5]。
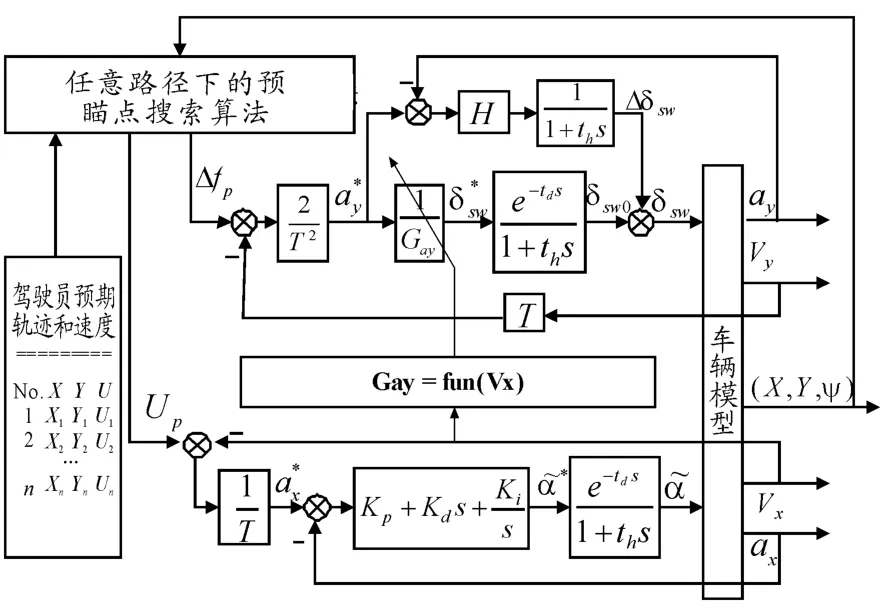
圖5 任意速度和道路跟隨控制的駕駛員模型
圖6為緊急雙移線試驗道路[6],其中:S1=S5=18.288 m;S2=S3=S4=12.192 m;變道距離D=4.572 m;標桿寬度B=3 m。該試驗道路可由有經驗的駕駛員以較高車速通過,以此模擬車輛臨界側滑和側翻等極限工況,從而更加全面地實現汽車操縱穩定性的實車試驗。該試驗工況對駕駛員的要求較高,因此該極限工況道路試驗測試駕駛員模型可以更加全面地考察駕駛員模型在復雜行駛工況下的軌道跟隨能力。圖7是在車速為80 km/h工況線性區內的駕駛員模型仿真結果。從圖中可以看出,車輛的運行軌跡會碰到標桿。

圖6 緊急雙移線試驗道路

圖7 線性駕駛員模型緊急雙移線仿真結果
2 大側向加速度下駕駛員模型的修正
針對大側向加速度線性區駕駛員模型無法很好地跟蹤道路軌跡的問題,本研究對該方向控制駕駛員模型提出兩點修正:側向加速度對方向盤轉角穩態增益Gay的修正和駕駛員預期軌道的修正[7]。
2.1 側向加速度對方向盤轉角穩態增益Gay修正
Gay是利用線性二自由度車輛模型推算的,因此在大側向加速度下的非線性區內就不成立了。
本研究采用前后軸側偏角作為反饋進行修正,修正的方向控制駕駛員模型如圖8所示[8-10]。將前軸側偏角α1和后軸側偏角α2正切值之差的絕對值乘以修正系數K后與1相加作為駕駛員輸入方向盤轉角的修正系數。可通過仿真對修正系數K進行優化,選出最優值。
2.2 駕駛員預期軌道修正
由圖7可以看出,在大側向加速度下的非線性區內駕駛員預期軌道選取標桿的中心線作為預期軌道,駕駛員轉動方向盤稍晚,車輛反應滯后碰到標桿。在真實情況下,駕駛員在多次經過同一軌道時會進行學習,通過調整自己的預期軌道,從而較好地通過該路線[11-12]。方向控制駕駛員模型也應該具備自適應調整預期軌道的功能,通過調整預期軌道,使該方向控制駕駛員模型具有較好的跟隨精度和通過性。

圖8 Gay修正后的方向控制駕駛員模型
3 仿真結果
針對上面對大側向加速度線性區駕駛員模型的兩種修正方法分別進行車速為80 km/h的緊急雙移線仿真,仿真結果如圖9所示。
從仿真結果中可以看出:側向加速度對方向盤轉角穩態增益Gay的修正對在該緊急雙移線工況下的車輛通過性稍有改善,但改善程度非常有限;而駕駛員預期軌道修正對在該緊急雙移線工況下的車輛通過性改善非常明顯,車輛可以順利通過。

圖9 修正后駕駛員模型緊急雙移線仿真結果
4 結論
1)側向加速度對方向盤轉角穩態增益Gay的修正對在緊急雙移線工況下的車輛通過性有一定的改善,但不明顯。
2)駕駛員預期軌道修正能夠較好地改善車輛在緊急雙移線工況下的通過性。
3)如何讓駕駛員模型自動辨識和修正駕駛員預期軌道是下一步研究的重點。
[1]Charles C M.Understanding and Modeling the Human Driver[J].Vehicle System Dynamics,2003,40(1/2/3):101-134.
[2]Ding H,Guo K,Wan F,et al.An Analytical Driver Model for Arbitrary Path Following at Varying Vehicle Speed[J].Int J Vehicle Autonomous System,2007,5(3/4):204-218.
[3]管欣,張立存,高振海.駕駛員確定汽車預期軌跡的網格式優化模型[J].中國機械工程,2006,17(15):1641-1644.
[4]李飛.轎車轉向節耐久性壽命預測研究[D].長春:吉林大學,2010.
[5]丁海濤,郭孔輝,李飛,等.基于加速度反饋的任意道路和車速跟隨控制駕駛員模型[J].機械工程學報,2010,46(10):116-120.
[6]ISO 3888- 2:2002.Road vehicles-Test procedure for a severe lane-change manoeuvre Part 2:Obstacle avoidance[S].
[7]郭孔輝.汽車操縱動力學[M].長春:吉林科學技術出版社,1991:526-531.
[8]段立飛,高振海,王德平.駕駛員對汽車方向的自適應控制行為建模[J].機械工程學報,2011,47(8):121-125.
[9]王玉海,宋健,李興坤.駕駛員意圖與行駛環境的統一識別及實時算法[J].機械工程學報,2006,42(4):206-212.
[10]管欣,崔文鋒,賈鑫.車輛縱向速度分相控制[J].吉林大學學報:工學版,2013,43(2):273-277.
[11]管欣,張立增,賈鑫.駕駛員方向控制模型圓弧式預瞄算法的研究[J].汽車工程,2012,34(12):1062-1064.
[12]Guan Hsin,Gao Zhenhai,Guo Konghui,et al.A Driver Direction Control Model and Its Application in the Simulation of Driver-vehicle-road Closed-loop System[C]//SAE Paper 2000-01-2184.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03