嵌入式船舶人員落水搜救控制系統的設計與研究
2015-12-07 05:21:44蔡紅梅
艦船科學技術 2015年11期
蔡紅梅
(集寧師范學院 計算機系,內蒙古 烏蘭察布012000)
0 引 言
現代水上和海上航運的繁榮,對海上和內河航運過程中人員落水搜救提出了更高要求。水上搜救是指國家或者部門針對船舶落水事故做出的搜尋、救援等工作。落水人員的搜救是一個技術性很強的系統工程,需要對海上搜救系統加大研發投入。當前艦載式落水人員的搜救系統主要由落水人員的視覺定位系統組成,通過定位能在接到求救信號后第一時間定位到落水人員盡可能準確的位置,縮小搜救范圍,縮短救助時間,提高落水人員的生存概率[1-3]。
隨著計算機視覺采集系統研究的深入,當前艦載搜集系統主要基于計算機視覺系統分析,引入人工智能、模式識別和圖像處理和水動力學等學科知識,實現對落水人員的控制系統設計。系統主要包括落水人員的相關特征數據分析和采集、圖像分析系統和嵌入式搜救系統等,由此設計人員落水搜救系統,提高船舶水上事故的導致人員落水后的救援能力。當前的落水搜救系統主要采用紅外和人眼識別[4],搜索效率不高,針對這一問題,本文對傳統艦載式落水人員搜救系統進行改進設計。
1 總體設計與圖像特征數據采集
1.1 艦載式搜救系統的總體設計
嵌入式人員落水搜救系統是通過對水下壓力、落水人員的視覺特征等物理特性,實現對落水人員的準確檢測。本文提出基于嵌入式遙感視覺定位和激光通信的落水人員搜救特征提取方法,該控制系統采用嵌入式Linux 操作系統設計,基于亮點模型衍射的方法實現視覺穿透,實現落水人員的視覺圖像特征采集,系統總體設計流程如圖1所示。

圖1 落水人員控制系統總體設計Fig.1 Overall design of the control system for the ship drowning persons
落水人員的搜救閃爍探頭輸出的電脈沖信號進行落水人員的視覺特征和落水部位的水位壓力等物理特征進行檢測,首先通過高速峰值檢測器進行峰值檢測,一旦檢測到脈沖峰值,表示可能存在落水人員,就通過后面的峰值保持器將峰值保持住,然后通過低速A/D 將峰值電壓進行量化,轉為數字信號,把該數字信號輸入到嵌入式控制系統中,進行數據分析[5]。通過嵌入式遙感視覺定位,實現落水人員的視覺定位,把脈沖幅度通過激光通信上輸入到檢測系統中,每個數字信號對應單片機內存中的一個地址,稱為一道,每收集到一個脈沖,就在相應的道值上加1,由此實現海上搜救。
本文對落水人員搜救系統的設計主要包括特征數據采集和圖像處理算法設計部分,作為系統的核心控制算法;另外還包括系統的硬件設計部分。
1.2 主要搜救算法的設計
落水人員特征數據采集包括圖像數據采集和水上物理信息采集,本文提出一種基于嵌入式遙感視覺定位方法,基于亮點模型衍射的方法實現視覺穿透,進行圖像特征數據采集,采用Huygens-Fresnel 原理[6],結合Fraunhofer 圓孔衍射算法,設計了海水湍流信道模型,提高激光通信在海水中的穿透力和衍射能力,為定位落水人員提供準確的數據基礎。
首先構建海水散射模型,本文采用Gamma -Gamma分布的方法構建海水散射物理模型,采用Fraunhofer 圓孔衍射,進行落水人員的視覺特征提取,Fraunhofer 圓孔遙感衍射光路圖如圖2所示。
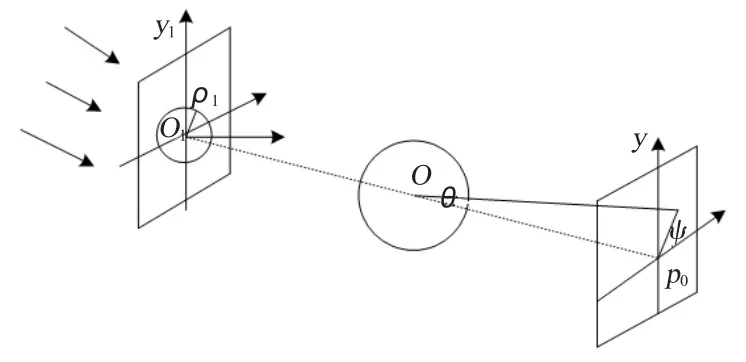
圖2 Fraunhofer 圓孔遙感衍射光路圖Fig.2 Fraunhofer hole diffraction optical remote sensing
采用激光在海水中衍射的方法實現視覺穿透,搜尋落水人員的目標信息,海水散射模型表達式為:

式中:I(x)為海水散射強度;J(x)為海水中進行遙感定位光線強度;A為海水湍流光子密度成分;t(x)為激光在海水中的穿透率,落水人員的數據信號采集和追蹤過程中,特征數據和采集信號的感知雙向。也就是說,由于受周圍環境的影響,采用無線射頻設備技術,往往會采集到含有大量噪聲的原始數據。對此,本文采用激光通信進行圖像視覺傳輸,激光在海水中的穿透波長系數為:

其中,ai為激光在海水中的視覺穿透亮點衍射系數,通過式(2),構建激光通信對RFID 數據濾波模型,進行圖像特征提純,對RFID 數據進行過濾,只保留第一個被輸出的標簽數據,通過過濾后的RFID數據需要保持原來的采集順序。基于亮點模型衍射的方法實現視覺穿透,由此得到落水人員目標定位優化函數表示為:
(2)預裂面開挖后的不平整度應≤15cm。預裂面不平整度通常是指預裂孔所形成預裂面的凹凸程度,其是衡量鉆孔和爆破參數合理性的重要指標,可依此驗證、調整設計數據。
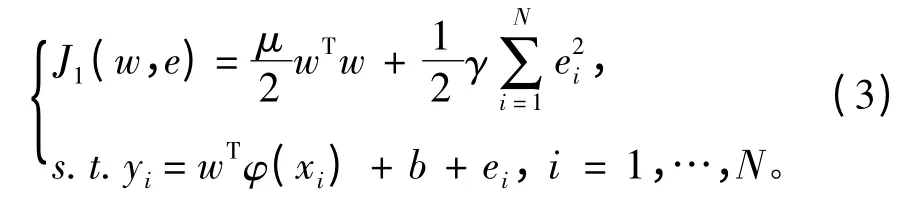
式中:φ(·)為激光波長核空間映射函數,wTφ(xi),落水人員圖像的散射模型表達式為:

式中,θ0為濾波器的方向;δθ為高斯函數的標準偏差。在視覺特征采集信道中,ηm(x,y)為紅外遙感特征隨落水人員動態分布變換的光斑強度。通過上述分析,實現了落水人員特征數據采集,為進行落水人員的搜索控制系統設計提供數據輸入。
2 艦載式嵌入式搜救系統硬件設計
在上述進行嵌入式人員搜救視覺定位和激光通信的基礎上,采用嵌入式的設計方法進行系統設計,系統主要由硬件模塊和軟件模塊構成。該系統采用嵌入式Linux 操作系統設計,實現人員落水人員的視覺圖像特征采集,在上述進行軟件模塊設計的基礎上,進行硬件模塊設計,整個嵌入式落水人員搜救系統硬件系統部分為5個子模塊:傳感器系統、AD 采集模塊、ARM 主控系統模塊、控制顯示模塊,供電系統[7-10]。系統硬件模塊設計如圖3所示。
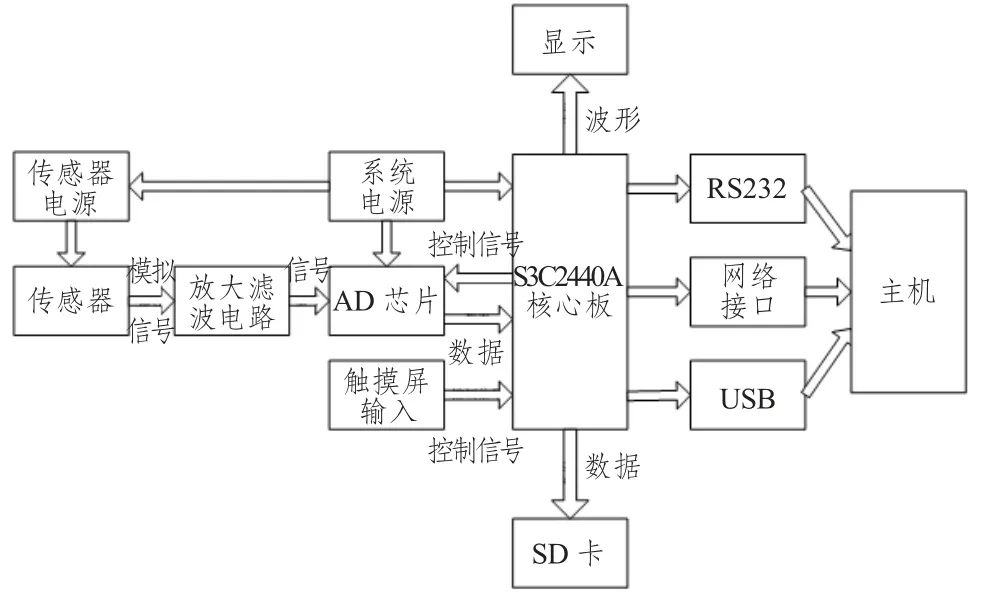
圖3 系統硬件模塊設計框圖Fig.3 Block diagram of hardware module of system
其中,傳感器模塊包括絕壓傳感器、差壓傳感器和圖像數據特征傳感器。AD 采集芯片負責采集將經過搜救控制信號調理后轉換為數字信號并傳給主控系統進行后級的數字處理。ARM 系統模塊的核心是ARM 嵌入式微處理器,進行嵌入式搜救控制,包括SDRAM,FLASH,NorFLASH 等。顯示模塊實現對落水人員目標定位數據的存儲和圖像顯示。
濾波電路中使用的運算放大器同樣為AD8034,為了優化圖像定位精度,設計二階低通濾波器,電路如圖4所示。
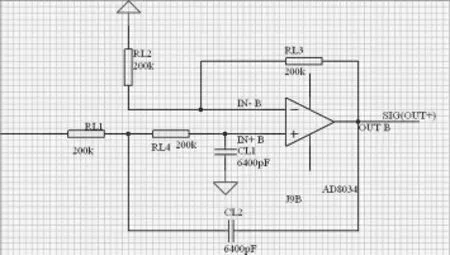
圖4 搜救系統二階低通濾波器Fig.4 Two order low-pass filter
低通濾波器電阻選用4個200 kΩ的貼片電阻,截止頻率為:

在此基礎上設計AD 系統,由信號接入、電源設計、控制電路3 部分組成,由于S3C2440的SPI接口被LCD控制接口和復位鍵的接口占用,采用嵌入式Linux,得到落水人員搜救的AD 數據特征采樣電路如圖5所示。
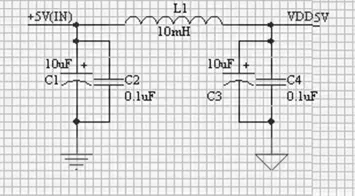
圖5 落水人員搜救的AD 數據特征采樣電路Fig.5 AD data feature sampling circuit for drowning personnel search and rescue
進行搜救控制模塊設計,搜救控制模塊核心是ARM控制器,由控制寄存器/顯存、LCDDMA、LPC3600、VIDPRCS,落水人員的搜救控制模塊電路如圖6所示。
落水人員的搜救控制模塊采用Linux 內核信,號接入DDATA3 (第1 腳)通過10 kΩ 電阻上拉到3.3 V,使SD 卡上電后自動進入SD 模式。本接口中該引腳用于卡上電后的模式選擇。設備驅動程序是操作系統與硬件直接對話,其中:
SDCMD (第2 腳)為命令響應線,SDCLK (第5 腳)為時鐘輸入信號。
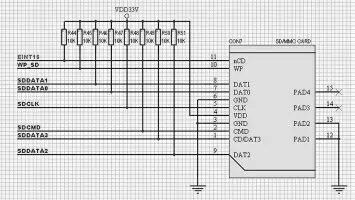
圖6 落水人員的搜救控制模塊電路Fig.6 Rescue and control module circuit for ship drowning personnel
DAT0~ DAT2 (第 7、8、9 引 腳) 加 上SDDATA3 組成4 位數據線。
EINT16 (第11 腳)為卡插入檢測信號。保證輸入的穩定性,除VDD、GND 外的引腳均通過10 kΩ 上拉到3.3 V。
最后進行系統電源供電,系統的輸入電源中有一路為3.3 V,因此無需額外芯片來產生,采用10 μF和0.1 μF的電容并聯來進行電源濾波,為了減小接線電感,采用0402的小封裝,再并聯一個10 μF 電容,用于儲能,防止電壓突變,采用0805 封裝。搜救系統的電源供電模塊電路如圖7所示。
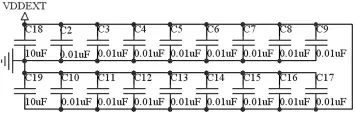
圖7 搜救系統的電源供電模塊電路Fig.7 Power supply module circuit for rescue control system
通過上述設計,完成了嵌入式人員落水搜救系統的設計,最后進行系統仿真實驗,測試本文設計的系統在提高搜救控制性能方面的優越性。
3 仿真實驗與性能測試
為了測試本文設計的嵌入式人員落水搜救系統的性能,進行仿真實驗。實驗中,首先進行系統調試,調試過程使用的儀器儀表如下:
1)Tektronix TX3 JTAG 電路;
2)Agilent EEPROM 33220A 函數信號發生器;
3)INSTEK PST3202 可編程電源;
4)Agilent 混合示波器。
落水人員的視覺特征收發信號和轉換信號進行獨立的Gamma 校正;16 位Zoom Video 口;支持硬件光標,并可對光標進行透明度控制;芯片自動對內部當前未工作的模塊進行關閉操作,最大可能地節省功耗;另外,M9 對外提供了很好的外部接口,其中包括PCI 總線接口,而顯示圖形板中的CPU 模塊中,由于內嵌了PCI 總線控制器,這樣可以方便地和M9通信,能夠很好地滿足波束指向性分析和應用研究,本文設計搜救系統的工作指標參數見表1。
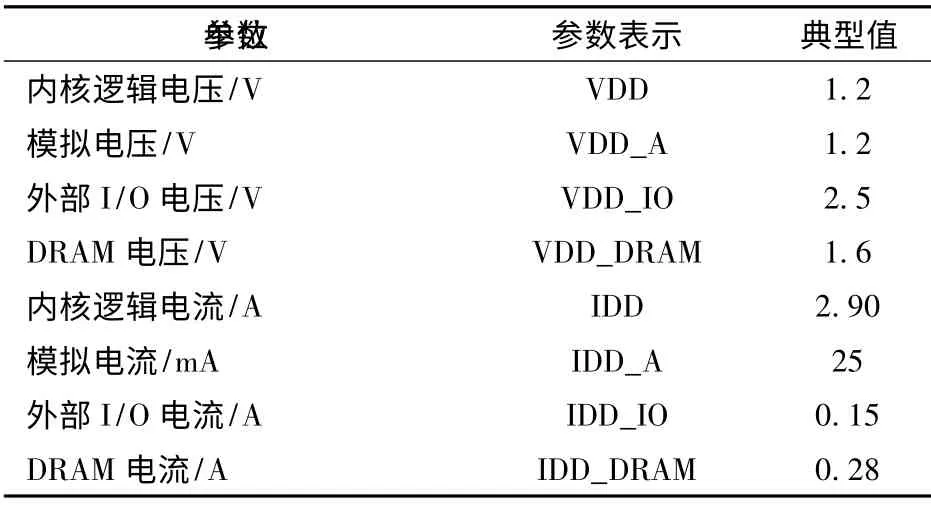
表1 工作指標參數Tab.1 Acoustic array working parameters
根據上述仿真環境設計,進行落水人員搜救系統的信號采集,分析系統輸出的電流電壓和落水區域的差壓壓力和絕壓壓力,得到數據采集結果如圖8所示。
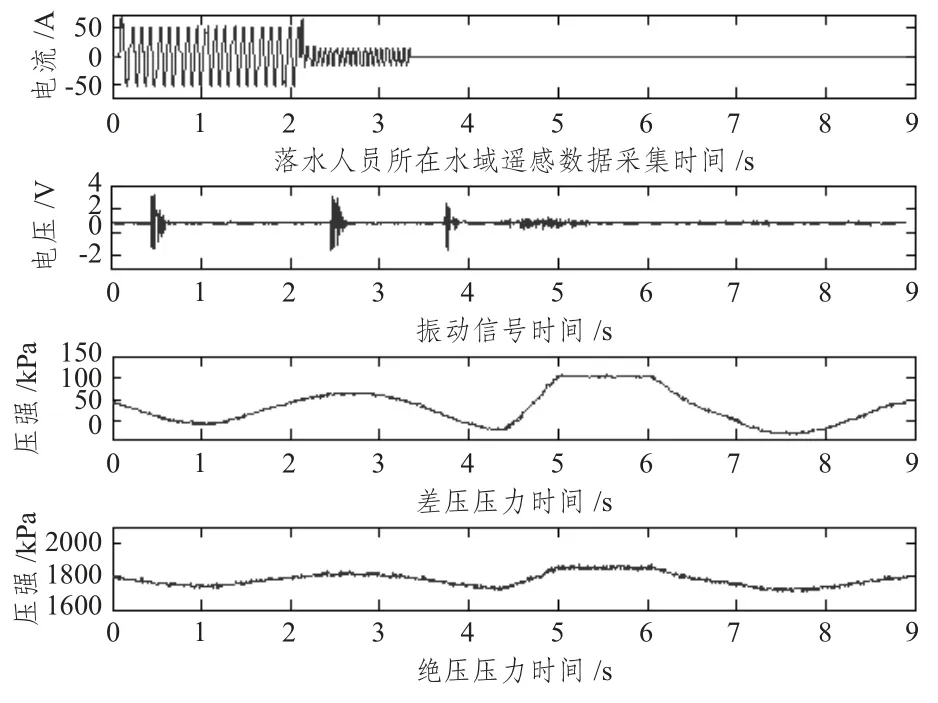
圖8 落水人員搜救系統的信號采集Fig.8 The signal acquisition of the rescue and control system of the ship drowning person
從圖可見,采用本文設計的系統進行落水人員所在水域的相關物理特征數據采集,能較好地反應落水區域的水域特征,便于實現對人員的判斷和定位,在此基礎上進行遙感視覺定位和激光通信,基于亮點模型衍射的方法實現視覺穿透,實現人員落水人員的視覺圖像特征采集,再結合本文設計的硬件系統實現對落水人員的位置信息熱點跟蹤,得到仿真結果如圖9所示,圖中A 區域部分即為落水人員的所在位置區域,分析可見,采用本文算法能準確實現對落水人員的視覺定位和特征提取,實現搜救智能控制,提高搜救效率。
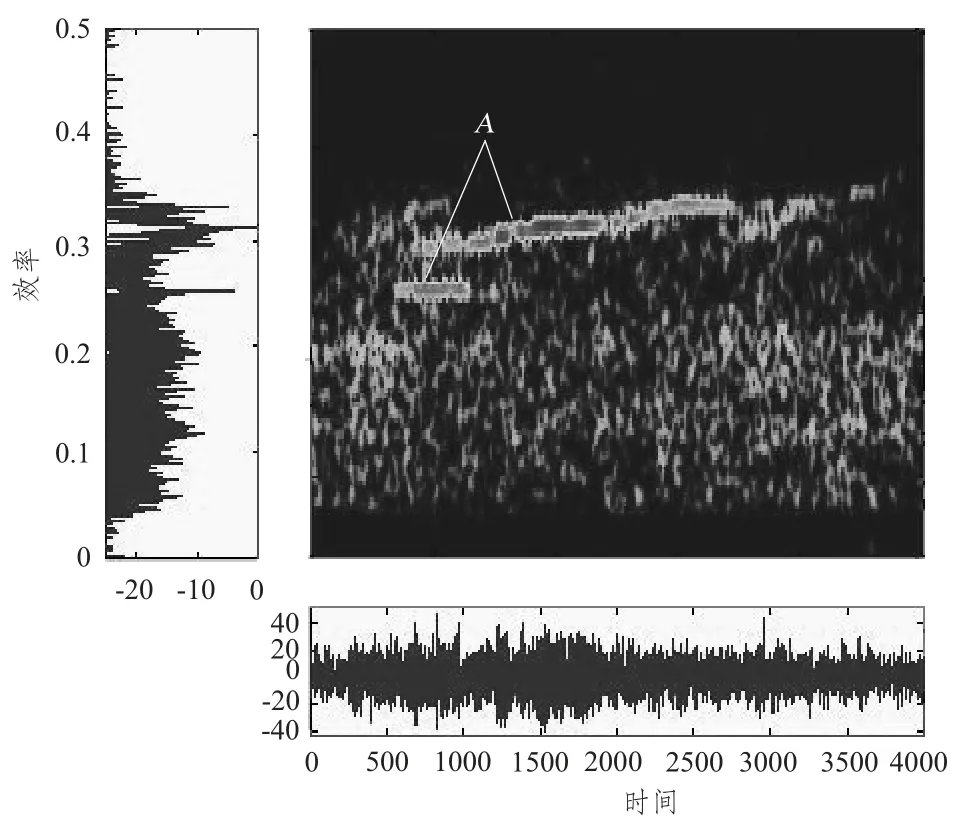
圖9 落水人員搜救熱點定位結果Fig.9 The hot spot location results of the rescue of the ship drowning persons
4 結 語
基于計算機視覺系統分析,引入人工智能、模式識別和圖像處理和水動力學等學科知識,實現對落水人員的控制系統設計,系統主要包括落水人員的相關特征數據分析和采集、圖像分析系統和嵌入式搜救系統等,提高船舶水上事故導致人員落水后的救援能力。本文提出一種基于嵌入式遙感視覺定位和激光通信的落水人員搜救特征提取方法,并采用嵌入式系統設計進行搜救系統實現,整個嵌入式落水人員搜救系統硬件系統部分為5個子模塊:傳感器系統、AD 采集模塊、ARM 主控系統模塊、控制顯示模塊,供電系統。本文完成了整個系統的軟件算法設計和硬件電路設計,仿真實驗結果表明,采用本文系統設計能有效實現對落水人員所在水域的相關物理特征數據采集,實現對人員的判斷和定位,準確實現對落水人員的視覺定位和特征提取,提高搜救效率。
[1]周勇,甘新年.魚雷制導控制系統多通道控制加權算法設計[J].現代電子技術,2014,37(19):14 -17.ZHOU Yong,GAN Xin-nian.The torpedo guidance control system for multi - channel control weighted algorithm design[J].Journal of Modern Electronic Technology,2014,37(19):14 -17.
[2]石鑫,周勇.基于信號峰脊陡變調制的雷達測距算法[J].物聯網技術,2015,5(4):12 -14.SHI Xin,ZHOU Yong.The radar ranging algorithm based on signal peak modulation ridge abrupt change[J].Journal of Internet Technology,2015,5(4):12 -14.
[3]趙威.基于魚雷自導的艦船尾流回波模型建立方法[J].艦船電子工程,2013,33(4):81 -83.ZHAO Wei.Methods based on torpedo homing ship wake echo model[J].Journal of Ship Electronic Engineering,2013,33(4):81 -83.
[4]劉家亮,王海燕,姜喆,等.垂直線列陣結構對PTRM 陣處理空間增益的影響[J].魚雷技術,2010,18(4):263-267.LIU Jia-liang,WANG Hai-yan,JIANG Zhe,et al.The vertical line array structure on PTRM array processing spatial gain[J].Torpedo Technology,2010,18(4):263-267.
[5]劉昊晨,梁紅.線性調頻信號參數估計和仿真研究[J].計算機仿真,2011,10(14):157 -159.LIU Hao-chen,LIANG Hong.Parameter estimation of LFM signal and simulation study[J].Computer Simulation,2011,10(14):157 -159.
[6]鄧異,梁燕,周勇.水聲換能器基陣信號采集系統優化設計[J].物聯網技術,2015,5(4):36 -37,41.DENG Yi,LIANG Yan,ZHOU Yong.Underwater acoustic transducer array signal acquisition system optimization design[J].Journal of Internet Technology,2015,5(4):36-37,41.
[7]劉美蓮,李爽.遠距離弱小目標視覺測量系統探測能力模型研究[J].科技通報,2012,28(8):177 -180.LIU Mei-lian,LI Shuang.Long-distance weak target detection capacity model research visual measuring system[J].Science and Technology,2012,28(8):177 -180.
[8]郭曉艷.油田管道不定衰減水聲信號的仿真分析[J].計算機仿真,2014,31(3):118 -121.GUO Xiao-yan.Oil pipeline and attenuation of underwater acoustic signal simulation[J].Computer Simulation,2014,31(3):118 -121.
[9]鄒勝宇,劉振,高海波,等.基于干擾力時間積分的懸吊漂浮物隨動控制方法[J].機器人,2015,37(1):1-8,16.ZOU Sheng-yu,LIU Zhen,GAO Hai-bo,et al.Tracking control method for suspended floater based on time integral of disturbance force[J].Robot,2015,37(1):1 -8,16.
[10]王磊,劉海濤,梁滔,等.低頻伺服力激勵下進給系統建模與動態響應分析[J].機械工程學報,2015,51(3):18-28.WANG Lei,LIU Hai-tao,LIANG Tao,et al.Modeling and analysis of dynamic response of servo feed system under low frequency excitation [J].Journal of Mechanical Engineering,2015,51(3):18 -28.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
鐵道通信信號(2018年2期)2018-04-18 12:18:23
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13