運用遺傳算法的磁流變阻尼器減震的模糊控制
2015-12-06 07:51:04林秀芳陳淑梅陳金蘭
重慶理工大學學報(自然科學) 2015年9期
林秀芳,陳淑梅,陳金蘭
(1.福建農(nóng)林大學金山學院,福州 350002;2.福州大學機械工程及自動化學院,福州 350108)
近年來,磁流變阻尼器已經(jīng)成為減振領域中一種非常重要的半主動控制裝置[1-5]。然而它具有很強的非線性特性,阻尼力不能直接控制,只有電壓可以直接控制,因而在控制過程中往往要求從期望阻尼力反算出控制電壓。雖然Spencer等[6]通過磁流變阻尼器的現(xiàn)象模型可以比較精確地預測阻尼力,但難以計算磁流變阻尼器所需的用于獲得理想控制力的輸入電壓值。
目前,模糊邏輯、神經(jīng)網(wǎng)絡、進化計算等人工智能的研究成果已經(jīng)在結(jié)構(gòu)振動控制領域得到應用。其中,由于模糊邏輯控制具有搭建非線性控制規(guī)則架構(gòu)的能力,且該規(guī)則對不確定和不精確的數(shù)學模型具有很強的適應性(即無需依賴數(shù)學模型,且具有較強的魯棒性),因此成為解決上述控制問題的一種重要方法。近些年,模糊邏輯控制在結(jié)構(gòu)振動控制領域中的應用研究備受科研人員和工程師的關注[5,7],如 Choi等[7]首次成功地將模糊控制用于磁流變阻尼器的結(jié)構(gòu)減震中。
模糊邏輯控制系統(tǒng)的設計過程往往依賴于人工經(jīng)驗和領域?qū)<业南闰炛R,例如隸屬函數(shù)的參數(shù)和模糊規(guī)則必須預先給定,且需要不斷調(diào)整,因此限制了其優(yōu)點的充分發(fā)揮。為彌補模糊邏輯控制系統(tǒng)在結(jié)構(gòu)-磁流變阻尼器減振控制中的不足,將模糊控制器和智能算法結(jié)合起來成為設計模糊邏輯控制系統(tǒng)的熱點。目前用遺傳算法優(yōu)化模糊控制器從而實現(xiàn)阻尼器對建筑結(jié)構(gòu)的減震控制已成為熱點[8-12]。文獻[8-11]用遺傳算法優(yōu)化的模糊控制器實現(xiàn)磁流變阻尼器對結(jié)構(gòu)的仿真控制,文獻[12]對文獻[8]的理論研究進行了實驗驗證。然而這些研究都僅限于用遺傳算法優(yōu)化模糊控制器的模糊規(guī)則,而模糊控制器的其他參數(shù)是預先給定的,因此限制了其優(yōu)勢的充分發(fā)揮。另外,二進制的編碼形式也使遺傳算法只能進行交叉和選擇的變異操作[8-9]。
本文提出一種具有混合編碼方式的基于遺傳算法的磁流變阻尼器模糊控制方法。為充分發(fā)揮模糊控制方法的特性,對其主要的參數(shù)進行優(yōu)化,包括隸屬函數(shù)的參數(shù)和模糊規(guī)則。為了證明該算法的有效性,本文將該算法與零電壓控制方法和只優(yōu)化模糊規(guī)則的模糊控制方法進行了比較。
1 模糊控制器的優(yōu)化設計
在傳統(tǒng)設計方法中,模糊控制器的參數(shù)(如隸屬函數(shù)和控制規(guī)則)通常是根據(jù)試誤法確定的。這種方法對人工經(jīng)驗及領域?qū)<蚁闰炛R的依賴性很強,且工作效率低,因而亟待對模糊控制器的參數(shù)進行優(yōu)化。本文以在第1層裝有磁流變阻尼器的一個3層建筑結(jié)構(gòu)為例,對模糊控制器的優(yōu)化設計進行探討。
1.1 輸入輸出的模糊化
在進行模糊控制器的設計時,首先要選擇適當?shù)妮斎肓亢洼敵隽俊?紤]到加速度是實際應用中最易(用傳感器)采集到的結(jié)構(gòu)響應,因此本研究以結(jié)構(gòu)的最高兩層的加速度響應作為所設計的模糊控制器的輸入。輸入磁流變阻尼器的控制電壓作為模糊控制器的輸出。將每個輸入(加速度)和輸出(電壓)的隸屬函數(shù)值都分成5個區(qū)域,輸入的語言變量均為NL,NS,Z,PS和PL,輸出的語言變量為VS,S,M,L 和 VL。
1.2 優(yōu)化參數(shù)和編碼
因為在相同輸入值的情況下,隸屬函數(shù)的類型和分布不同,故輸出值很可能也不同。由于鐘形隸屬函數(shù)通過調(diào)整自身參數(shù)可以逼近其他隸屬函數(shù),因此本研究采用鐘形隸屬函數(shù):
其中:a,b和c為隸屬函數(shù)的半寬、斜度和中心。對每個隸屬函數(shù)的a和b參數(shù)進行優(yōu)化。隸屬函數(shù)的總數(shù)為15個,故待優(yōu)化的隸屬函數(shù)的參數(shù)總數(shù)為30個,均采用實值(浮點數(shù))的編碼形式。
模糊規(guī)則采用“if-then”的形式進行表達,例如規(guī)則i:如果輸入1是NL且輸入2是PL,則輸出為M。
由于輸入數(shù)目為2,每個輸入有5種可能性,故該規(guī)則表由25個規(guī)則組成,且均采用非實值的編碼形式。即在編碼中用1~5的整數(shù)分別代表VS,S,M,L和VL。遺傳算法的混合編碼結(jié)構(gòu)如表1所示。
2 優(yōu)化的目標函數(shù)
研究時需要兼顧建筑物的安全性和其中人員的舒適性,其中:位移是與安全性有關的參數(shù);加速度是與舒適性有關的參數(shù)。因此,遺傳算法優(yōu)化的目標函數(shù)定義為

式中:
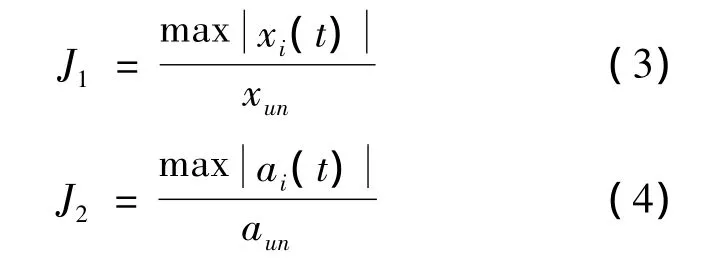
其中:xi(t)和ai(t)分別是第i層樓的相對位移和絕對加速度;xun和aun分別是建筑物在不受控時的最大位移和最大絕對加速度;J1和 J2分別是最大位移和最大加速度響應最小化的單目標函數(shù);α是反映J1和J2相對重要性的權重。
3 仿真實驗
3.1 仿真條件
采用一個3層建筑物結(jié)構(gòu)作為受控對象,其使用磁流變阻尼器減震的建筑結(jié)構(gòu)如圖1所示。
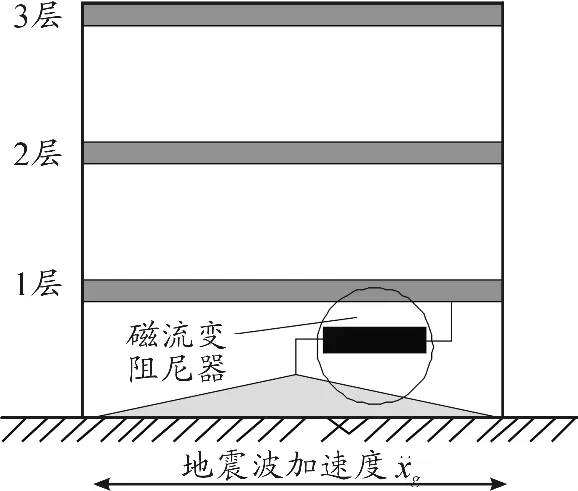
圖1 使用磁流變阻尼器減震的3層建筑結(jié)構(gòu)
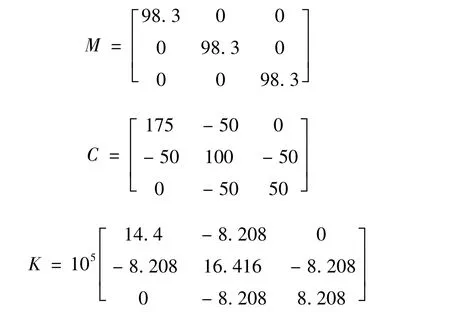
在第1層和地面之間安裝1個磁流變阻尼器。該結(jié)構(gòu)的各層質(zhì)量均為98.3 kg,1~3層的剛度分別為619 200,820 800和820 800 N/m。其質(zhì)量(kg)、阻尼(Ns/m)和剛度(N/m)矩陣分別為[13]:
對該結(jié)構(gòu)采用El-Centro地震波進行激勵,采樣頻率為0.02 s,激勵時間為20 s。由于建筑物是一個縮尺的模型,按照結(jié)構(gòu)相似度原則,把地震加速度加速5倍作為該模型的激勵。遺傳算法的具體參數(shù)為:種群規(guī)模為220,變異概率和交叉概率分別為0.1和0.9,迭代次數(shù)為100。進化操作選用轉(zhuǎn)盤選擇和雙點交叉方法。令式(2)中的權重α=0.5。以第2層和第3層的加速度響應作為模糊控制器的輸入,輸出為磁流變阻尼器的控制電壓。仿真中用到的磁流變阻尼器的力學模型采用目前廣泛使用的文獻[6]提出的現(xiàn)象模型。模糊控制的電壓值的上限為2.25 V。
3.2 仿真結(jié)果和對比
圖2是基于遺傳算法模糊控制的目標函數(shù)值的收斂曲線。曲線1為僅優(yōu)化模糊控制器的模糊規(guī)則的迭代結(jié)果,曲線2為同時優(yōu)化隸屬函數(shù)和模糊規(guī)則的迭代結(jié)果。為了方便比較,曲線1所采用的遺傳算法的具體參數(shù)與曲線2的參數(shù)完全相同,包括種群規(guī)模、迭代次數(shù)、變異概率、交叉概率、進化操作方法以及目標函數(shù)。由圖2可知:同時優(yōu)化隸屬函數(shù)和模糊規(guī)則的方法能獲得更小的目標函數(shù)值。由于僅優(yōu)化模糊規(guī)則這種方法的優(yōu)化參數(shù)的數(shù)量較少,使得初始種群相對不夠理想,因此其在100代時的目標函數(shù)值接近于本文方法的初始目標函數(shù)值。值得注意的是,對于本文算法,如果采用更大的迭代次數(shù)以及種群數(shù),目標函數(shù)值還將減小,控制效果也將更好。
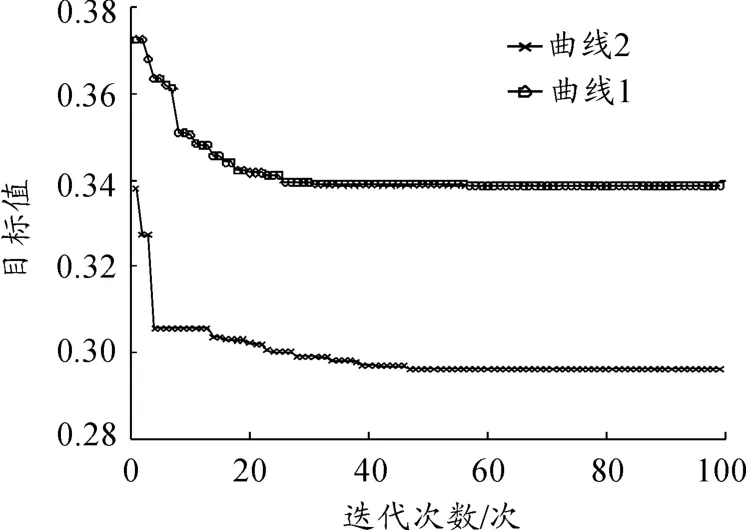
圖2 遺傳算法優(yōu)化模糊控制器參數(shù)的迭代曲線
表2比較了地震波激勵下的無控和各種控制方法作用下的響應波峰值。表2中:xi,di和¨xi分別是第i個樓層的相對位移、層間位移以及絕對加速度的峰值;F是控制方法中所需的磁流變阻尼器的最大阻尼力。表2中的百分數(shù)是各種控制方法作用下的響峰值相對于無控制時的響應峰值的減小率。模糊控制1是與圖1中的曲線1相對應的只優(yōu)化模糊規(guī)則的方法,模糊控制2是本文提出的控制方法,即基于混合編碼遺傳算法的同時優(yōu)化模糊規(guī)則和隸屬函數(shù)的模糊控制方法。當只優(yōu)化模糊控制器的模糊規(guī)則時,最大(第3層)位移相對于無控時的位移減小了70%,最大(第3層)加速度相對于無控時的加速度減小了62%。當采用本文方法時,最大位移和最大加速度的減小率分別為74%和67%。這兩項峰值指標是作為遺傳算法優(yōu)化的目標,而圖2結(jié)果表明單純優(yōu)化模糊規(guī)則的控制方法產(chǎn)生的目標函數(shù)值大于本文方法的目標值。
由表2可知:盡管算法優(yōu)化的對象是所有樓層中的最大位移和最大加速度(見式(2)),但本文提出的基于混合編碼遺傳算法的模糊控制方法可以明顯地減小各樓層的位移、層間位移和加速度響應峰值。雖然為磁流變阻尼器提供0 V電壓的控制方法也能產(chǎn)生減震效果,但相比本文方法,只有第1層的加速度峰值和最大阻尼力稍小,其他幾項峰值都不如本文方法的結(jié)果好。相比只優(yōu)化模糊規(guī)則的模糊控制方法的結(jié)果,本文方法的結(jié)果全部都比其他好。因此,通過這幾種方法的比較,表明本文所提出的算法的綜合減震效果最好。

表2 地震波激勵下的響應峰值的比較
表3和圖3是采用本文方法優(yōu)化后的模糊控制器的模糊規(guī)則和模糊規(guī)則曲面。圖4為采用本文方法優(yōu)化后的模糊控制器的隸屬函數(shù)。

表3 優(yōu)化后的模糊控制器的模糊規(guī)則
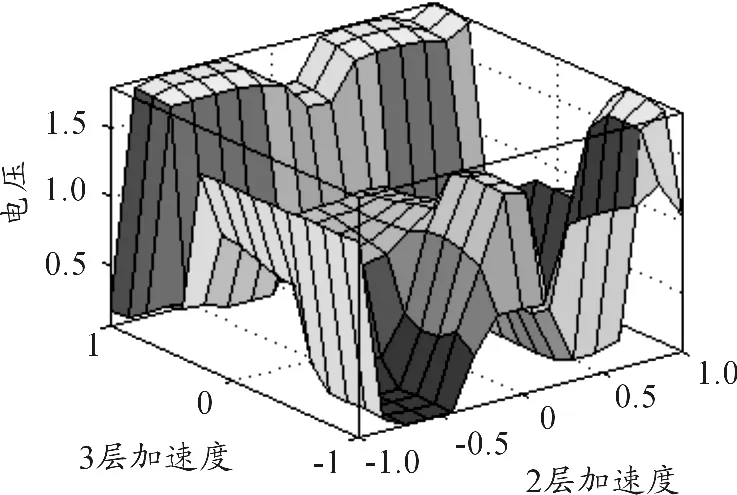
圖3 優(yōu)化后的模糊控制器的模糊規(guī)則曲面
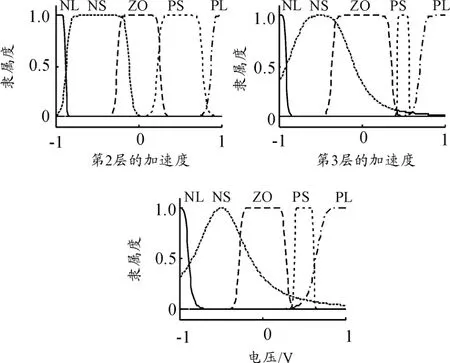
圖4 優(yōu)化后的模糊控制器的隸屬函數(shù)
為了更直觀地顯示本文方法的減震效果,圖5和圖6分別比較了不受控制條件下和利用本文提出的基于混合編碼遺傳算法的模糊控制條件下的所有樓層的位移時程響應和加速度時程響應,其中:虛線代表不受控的響應;實線代表受控的響應。
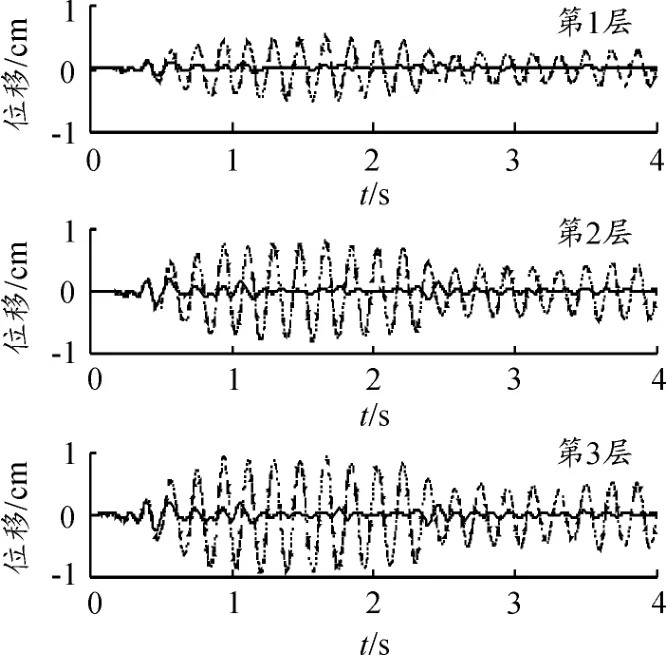
圖5 受控和不受控情況下的位移響應的比較
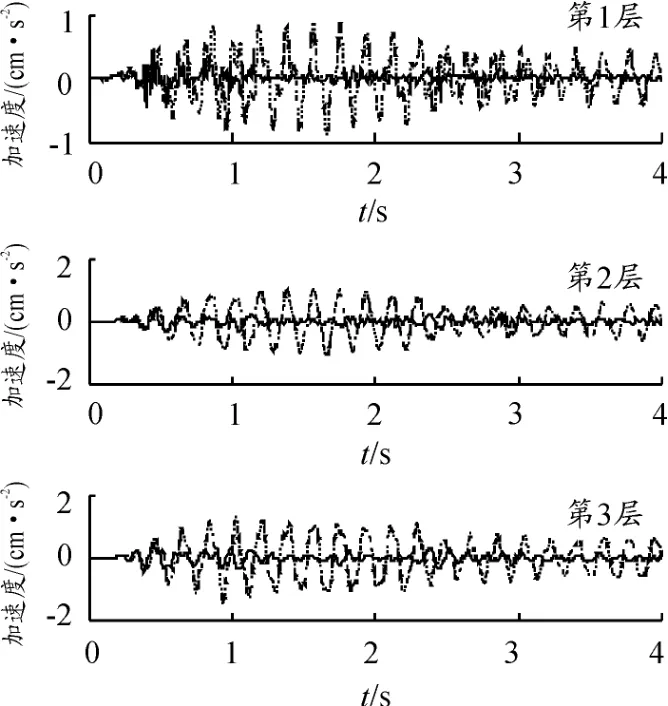
圖6 受控和不受控情況下的絕對加速度響應的比較
優(yōu)化后的電壓和阻尼力的時程圖分別如圖7、8所示。由這兩圖可知:阻尼力的變化趨勢和電壓的變化趨勢是基本一致的,說明當對磁流變阻尼器施加電壓時,阻尼力可以間接地得到控制。雖然模糊控制中設定的電壓上限值為2.25 V,但實際優(yōu)化后的模糊控制器產(chǎn)生的電壓值最大不超過1.3 V。
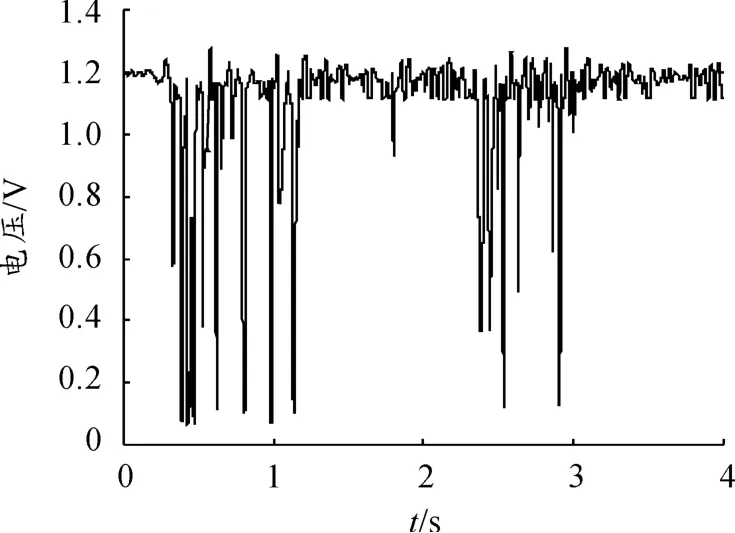
圖7 優(yōu)化后的電壓-時程圖
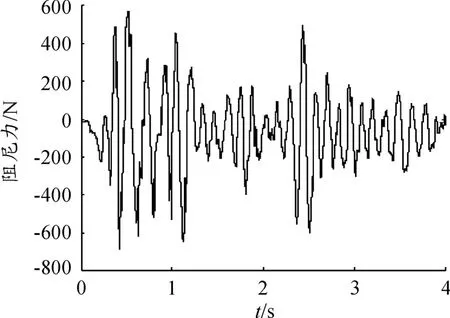
圖8 優(yōu)化后的阻尼力-時程圖
4 結(jié)束語
為充分發(fā)揮磁流變阻尼器的減震性能,開發(fā)了將混合編碼的遺傳算法和模糊控制相結(jié)合的半主動控制方法。首先用多目標遺傳算法優(yōu)化模糊控制器的主要參數(shù),包括隸屬函數(shù)參數(shù)和模糊規(guī)則。為同時優(yōu)化這些參數(shù),提出實值編碼和非實值編碼相混合的遺傳算法編碼形式。然后利用優(yōu)化后的模糊控制器為磁流變阻尼器提供產(chǎn)生阻尼力的最優(yōu)電壓值。以磁流變阻尼器-結(jié)構(gòu)減震系統(tǒng)為例進行仿真,結(jié)果表明:本文提出的利用混合編碼的遺傳算法優(yōu)化獲得的模糊控制器明顯地減小了結(jié)構(gòu)的地震響應。今后的研究將著力于改進遺傳算法以提高優(yōu)化的效率和改善優(yōu)化的效果。相應的實驗驗證也將是今后的研究內(nèi)容。
[1]劉石,仲繼澤,馮永新,等.使用磁流變阻尼器的大型汽輪發(fā)電機定子端部繞組振動控制[J].西安交通大學學報,2013,47(4):39-43.
[2]崔治,葛友華,田曉峰,等.磨削壓力控制用磁流變液阻尼器設計[J].機械設計與研究,2012,28(6):60-66.
[3]趙強,米磊,尹佳星.基于磁流變阻尼器的車輛懸架振動優(yōu)化控制[J].武漢理工大學學報:交通科學與工程版,2013,37(2):241-245.
[4]朱永凱,時光志,夏華波,等.磁流變阻尼器在船舶減振中的應用[J].艦船科學技術,2014,36(1):79-83.
[5]胡財寶,丁建國.基于模糊控制的 MR阻尼器在結(jié)構(gòu)抗震中的應用研究[J].世界地震工程,2014,30(4):269-274.
[6]Spencer B F,Dyke S J,Sain M K,et al.Phenomenological model for magnetorheological dampers[J].Journal of Engineering Mechanics,1997,123(3):230-238.
[7]Choi K M,Cho S W,Jung H J,et al.Semi-active fuzzy control for seismic response reduction using magnetorheological dampers[J].Earthquake Engineering and Structural Dynamics,2004,33(6):723-736.
[8]Yan G,Zhou L L.Integrated fuzzy logic and genetic algorithms for multi-objective control of structures using MR dampers[J].Journal of sound and vibration,2006,296(1):368-382.
[9]汪權.建筑結(jié)構(gòu)地震響應半主動控制的遺傳-模糊算法[J].地震工程與工程振動,2010(6):127-133.
[10]Kazemi,Bidokhti K,Moharrami H,et al.Semi-active fuzzy control for seismic response reduction of building frames using SHD dampers[J].Structural Control and Health Monitoring,2012,19(3):417-435.
[11]孫欣,丁建國,朱煒.基于優(yōu)化模糊控制規(guī)則的磁流變阻尼減震結(jié)構(gòu)地震反應分析[J].工程抗震與加固改造,2015,37(1):51-63.
[12]胡家亮,周麗,嚴剛.基于磁流變阻尼器的結(jié)構(gòu)模糊半主動控制實驗研究[J].振動與沖擊,2009,28(3):131-135.
[13]Dyke S J,Spencer Jr B F,Sain M K,et al.Modeling and control of magnetorheological dampers for seismic response reduction[J].Smart Materials and Structures,1996,5(5):565.
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34