新型可爬梯式智能輪椅的研究和設計*
2015-12-06 01:33:38吳曉龍伍學明李成毅
中國醫學裝備 2015年6期
關鍵詞:設計
吳曉龍 覃 忠 伍學明 李成毅*
新型可爬梯式智能輪椅的研究和設計*
吳曉龍①覃 忠①伍學明②李成毅②*
目的:研究并設計一種新型可爬梯式智能輪椅,從而解決醫院孕婦、母嬰及各類需乘坐輪椅的患者在面對凹凸不平、路況復雜的道路上身旁無護理人員時不能自我處理的難題。方法:通過對目前國內、外爬梯式輪椅研究現狀及市場的需求展開研究,以Y型行星輪作為可爬梯式輪椅行走部件以及驅動系統構建型輪椅結構,并用AutoCAD繪圖軟件建立模型進行結構分析。結果:新型可爬梯式輪椅達到的主要技術參數為:①微處理器控制,速度可調為1~10 km/h;②承重為120 kg;③最大爬坡角度為15o左右;④最大越障高度為25 cm;⑤最大越溝寬度為25 cm;⑥充電時間為8 h。結論:新型可爬梯式智能輪椅的系統主要技術指標能夠滿足電動輪椅的國家標準。
智能輪椅;行星輪;爬梯
[First-author’s address] Equipment Division of Nanhai District Hospital Foshan City, Foshan 528000, China.
目前,社會對輪椅的需要越來越大,并對其性能指標要求越來越高。國外發達國家于20世紀70年代已有智能成熟設備進入市場,而我國現有的輪椅,尤其是肢殘者與老年人大量使用的多為手動輪椅,由于輪椅本身無動力,實際使用時往往需要他人輔助。
無論是醫院中孕婦、母嬰還是殘疾人和腿腳不便的老年人,由于生理上的不便其需求存在很大的不同,普通輪椅只能適應普通的室內環境和室外路況,而面對臺階、樓梯和經常可遇到的障礙物等卻只能望而卻步,即使有人輔助越過這些障礙物也非常吃力和困難,給乘坐輪椅的人帶來了很大的麻煩,致使許多殘疾人或老年人平時只呆在家里[1]。對于身體虛弱的殘疾人和老年人,缺少戶外運動更是讓他們生理和心理都產生不好的影響,從而導致疾病的發生。為改變我國輪椅手搬人推的較為落后狀況,滿足人們對現代生活質量日益提高的需求,本研究開發研制新型智能輪椅,以解決醫院孕婦、母嬰及各類需乘坐輪椅的患者面對凹凸不平、路況復雜而身旁無護理人員時不能有效地自我處理的難題。
1 新型可爬梯式輪椅研究現狀與系統原理
目前市場上的普通輪椅結構大致相同,分為手動輪椅和電動輪椅2種。手動輪椅多用手輪圈驅動(如圖1所示)。電動輪椅則由直流電機帶減速箱驅動,搖柄控制(如圖2所示)。而爬樓梯裝置爬樓執行機構的類型主要歸結為輪組式、履帶式和多足式3類[2]。

圖1 普通手動輪椅示圖

圖2 普通電動輪椅示圖
1.1 輪組式輪椅
輪組式輪椅的特點是每個輪組依照行星輪的方式進行運動,平地行駛時各小輪繞各自軸線自轉,爬樓梯時各小輪一起繞中心軸公轉。爬樓梯裝置按照所使用的輪組對數可分為單輪組式和雙輪組式。輪組式爬樓梯裝置與其他構型的裝置相比其質量輕便運動靈活,在無障礙環境下具有較好的行動性能,但是上、下樓梯時該類型裝置重心起伏較大,會使乘坐者感到不適,因此需要設計一種自適應座椅調平機構[3](如圖3所示)。

圖3 輪組式輪椅示圖
1.2 履帶式輪椅
履帶型機構的爬樓梯輪椅應用較多,其采用比行星輪機構更為連續的行走方式,傳動效率較高。在上下樓梯過程中輪椅的重心總會沿著與樓梯臺階連線相平行的直線運動,其重心的波動很小,運動非常平穩[4]。然而,履帶式爬樓梯輪椅最大的不足是平地行走時阻力較大,運動不靈活,在爬樓梯時履帶容易損壞樓梯沿(如圖4所示)。

圖4 履帶式輪椅示圖
1.3 多足式輪椅
多足式輪椅的主要特點為具有兩套或兩套以上支撐裝置,多套支撐裝置交替支撐,以實現上、下樓梯的功能。這種機構的爬樓梯過程類似于人體上下樓梯的過程,故有人稱之為步行式爬樓梯輪椅,1892年Bray發明的第一臺爬樓梯輪椅就采用了這種方式[5]。在爬樓梯時先由其中一套支撐裝置支撐,抬高輪椅及另一套支撐系統,再水平向前移動,上一級臺階。然后,由另一套支撐裝置支撐,將前面那套支撐裝置收回,如此循環,直到爬完樓梯為止,其爬樓梯過程不連續。此種類型的爬樓梯輪椅運動相對比較平穩,但是對控制的要求較高,操作較為復雜(如圖5所示)。

圖5 多足式輪椅示圖
由于輪組式爬樓梯輪椅可以兼顧平地行駛和爬樓梯,而且結構緊湊,體積小巧,效率較高,操作相當簡單,是比較理想的爬樓梯機構。結合我國國情和輪椅使用者的經濟承受能力,在分析現有爬樓梯機構優缺點的基礎上,本研究設計了一種基于輪組機構的爬樓梯輪椅,既可滿足爬樓梯功能,又安全可靠,操作方便,通用性好而且價格適中。
2 新型可爬梯式輪椅結構與設計
可爬梯式輪椅設計的基本要求為:①具有普通輪椅功能;②座椅在行進和爬梯時要平穩;③驅動機構穩定;④重量較輕容易搬動;⑤價格適中。其主要由車架、座椅調平機構、行駛機構、驅動機構和制動機構等組成。新型爬梯式輪椅的總體計算機輔助設計(computer aided design,CAD)結構如圖6所示。

圖6 新型可爬梯式輪椅CAD結構圖
2.1 動力驅動機構
動力機構由2個驅動橋組成,前后橋各有一套傳動系統,由變速馬達、減速器、差速器和左、右輪系統組成。輪椅采用4驅動形式,以保證爬樓梯時通過足夠的翻轉力矩(如圖7所示)。
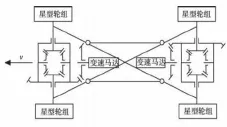
圖7 爬梯輪椅的傳動機構示意圖
2.2 行駛機構
行駛機構采用輪組結構。輪組結構一般由2個以上的小輪構成,小輪為2個時其結構最簡單,但爬梯時輪架所需的翻轉力矩最大,輪組支架中心的起伏也最大。隨著小輪個數的增加,輪組支架所需的翻轉力矩減小,輪組架中心的起伏減小,但結構也隨之復雜。本研究選用由3個小輪構成的輪組結構,即星輪結構。平地行駛時,輪系為定軸輪系,任意2個小輪著地,實現前進;遇到障礙或樓梯時,利用電磁離合器將驅動輪鎖死,不能往后退。爬樓過程中,行星輪系將承受很大的爬樓力矩及碰撞沖擊,非常容易損壞(如圖8所示)。

圖8 星輪結構傳動簡圖
2.3 座椅調平機構
在上下樓時爬樓梯輪椅整體是傾斜的,坐在傾斜的輪椅會使乘坐者感到不適。為了克服這一弊端和輪椅爬樓過程中重心的起伏,專門設計了一種滾道滑軌式的座椅調平機構,其主要由圓弧形軌道及滾軸組成[9-10]。滑軌焊接在底架上,滾軸通過螺紋連接固定在座椅底部的支架上,其軸端安裝有軸承可以在滑軌里滑動,從而實現座椅的調平(如圖9所示)。

圖9 滾道滑軌式座椅調平機構原理圖
2.4 制動機構
為了保證輪椅爬樓過程的安全性,必須保證其良好的制動性。制動機構分為剎車和防上下滑動兩部分,當人坐在輪椅中上下樓梯時為保證安全必須設置一些防止打滑移動的裝置,以保證輪椅上下樓梯時不發生上下打滑移動。
3 新型可爬梯式輪椅運動過程分析
3.1 平地行駛
當輪椅在平地行駛時行星輪的任意個小輪著地,其效率與普通輪式車輛相同。當前后變速馬達轉速相同時輪椅能夠克服地面摩擦力直線行駛;當前后變速馬達存在轉速差時可實現輪椅轉彎。
3.2 跨越障礙
輪椅直線行進時遇到一般障礙,當障礙物高度較小時可利用小車輪尺寸優勢直接通過;當前進的車輪碰上較高障礙而不能直接通過時電磁離合器結合,定軸輪系發生演變,帶動支架翻轉越過障礙。
3.3 跨越壕溝
輪椅可以跨越一定寬度的壕溝,其跨溝原理與越障相同,當行星輪不能直接通過小溝時,接通電磁離合器,帶動支架翻轉實現跨越壕溝。
3.4 爬梯
輪椅爬樓梯過程中平地行駛時任意兩個小輪著地,電磁離合器分離,可以有效利用車輪的附著質量,提高車輪的通過性;當最前端的車輪遇到樓梯或者障礙物時前行星輪電磁離合器開啟,同時小輪自鎖,帶動前支架翻轉輪椅開始爬梯;當后輪遇到樓梯或者障礙物時后行星輪電磁離合器開啟,帶動后支架翻轉開始爬樓,爬樓過程中座椅始終保持水平(如圖10所示)。

圖10 新型可爬梯式輪椅爬梯過程示圖
4 結語
目前,現有輪椅尤其是肢殘者與老年人大量使用的多為手動輪椅,由于輪椅本身無動力,實際使用時往往需要他人輔助,諸感不便。為改變我國輪椅手搬人推的落后狀況,更好地為傷殘人員服務,滿足人們對現代生活質量日益提高的需求,積極開發研制智能輪椅具有重要意義。本研究設計的新型可爬梯式輪椅的主要技術指標能夠滿足電動輪椅的國家標準GB/T12996-1991“電動輪椅車”,翻越樓梯指標能夠滿足國家標準GB 50386-2005“住宅建筑規范”中所規定樓梯標準及常見的戶外樓梯,由此有很好的應用推廣意義[11-13]。
[1]程智力,李君華.殘疾人多功能輪椅設計研究[J].美術大觀,2010(12):211.
[2]李超,胡延平,韋端利.一種輪組結構的爬樓梯輪椅的設計[J].現代機械,2010(6):169-176.
[3]袁愛霞,高中庸,李寶靈.機械原理與機構創新設計[J].高教論壇,2007(1):78-79.
[4]蘇和平,王利華.手動爬樓梯輪椅爬行部件的改進[J].中國康復醫學雜志,1999,9(5):219-220.
[5]馮雅麗,馬佳珍,張文明,等.深海采礦機行星輪式行走機構越障行為[J].北京科技大學學報,2009(7):923-928.
[6]蘇和平,王人成.一種雙聯星形輪機構電動爬樓梯輪椅的設計[J].中國臨床康復,2005,9(26):144-145.
[7]金強,吳昌林,劉香香.行星輪式爬樓梯輪椅的應用研究[J].中國康復醫學雜志,2011,26(1):65-68.
[8]王洪欣,李愛軍.行星輪點軌跡的圖形分類與應用研究[J].工程圖學學報,2010(3):11-14.
[9]杜宇,吳燮華.電動輪椅控制器的設計與實現[J].電力電子技術,2004(1):63-65.
[10]袁世奇,宮興禎,唐宗軍.一種具有全方向運動功能的電動輪椅的設計[J].沈陽工業大學學報,2004(6): 612-615.
[11]國家技術監督局.GB/T12996-1991電動輪椅車[S].國家技術監督局,1991-06-19.
[12]甘新平,伍學明,許小強.新型多功能電動輪椅的研究和CAD設計[J].臨床醫學工程,2012,19(7):1041-1042.
[13]中華人民共和國建設部.GB 50386-2005住宅建筑規范[S].國家質量檢驗檢疫總局,2005-11-30.
Research and design of the new stair climbing intelligent wheelchair
WU Xiao-Long, QINZhong, WU Xue-ming, et al
China Medical Equipment,2015,12(6):12-15.
Objective: Study and design the new stair climbing intelligent wheelchair for the people who use wheel chair in order to be well handled in the face of the rugged road especially ladder and other obstacles. Methods: By means of research the status of the current ladder wheelchair at home and abroad, as well as market demand, the new ladder-type wheelchair parts and the drive system is based on the Y-type planetary gear, and use the AutoCAD software to draw model and analysis structure. Results: Main technical specification of the new stair climbing intelligent wheelchair as follows: speed adjustable controlled by Microprocesso, 1-10 km/h; carry weight: 120 kg; maximum climbing angle: 15o; maximum climbing barrier altitude: 25 cm; maximum climbing barrier width: 25 cm; battery charging time: 8 h. Conclusion: Main technical specifications of the system are satisfied with the national criterion.
Intelligent wheel chair; Planetary gear; Ladder
吳曉龍,男,(1969- ),本科學歷,工程師。佛山市南海區中醫院設備科,從事醫療設備采購、維修、保養、效益分析及檔案管理工作。
1672-8270(2015)06-0012-04
R197.39
A
10.3969/J.ISSN.1672-8270.2015.06.004
2015-03-02
廣東省重大科技專項(2012A080104010)“基于云計算及物聯網的母嬰云端智能呵護平臺”
①佛山市南海區中醫院設備科 廣東 佛山 528000
②廣州市第十二人民醫院設備科 廣東 廣州 510620
*通訊作者:646845462@qq.com
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04