基于慣導輔助地磁的手機室內定位系統(tǒng)設計*
2015-11-29 08:28:36周明達吳懷宇
傳感技術學報 2015年8期
宋 鏢,程 磊,周明達,吳懷宇,陳 洋
(武漢科技大學冶金自動化與檢測技術教育部工程研究中心,武漢430081)
基于慣導輔助地磁的手機室內定位系統(tǒng)設計*
宋 鏢,程 磊*,周明達,吳懷宇,陳 洋
(武漢科技大學冶金自動化與檢測技術教育部工程研究中心,武漢430081)
目前的室內定位技術大都是需要建立足夠多的信號節(jié)點,這種有源信號受建筑物干擾衰減快導致其定位精度不足。為了避免這些存在的問題,通過深入研究室內定位方法,提出了基于慣導輔助地磁匹配的適用于手機移動終端的室內定位方法。有別于傳統(tǒng)的室外定位系統(tǒng),本文利用地球磁場在不同點的差異化信息,并通過選擇適當?shù)牡卮牌ヅ渌惴ǎ梢詫崿F(xiàn)不依賴于外部設備的移動個體室內定位,同時通過慣導輔助地磁的組合定位方式有效增加地磁信息匹配效率,能獲得較高的室內定位的精度。最后設計了基于android平臺的手機室內定位軟件,可利用手機內置的傳感器設備實現(xiàn)室內定位功能,仿真及實驗顯示該定位方法是有效的。
地磁應用;傳感器;室內定位;慣性導航;android
隨著科技的進步,研究者們針對移動定位技術方向的研究工作始終沒有停止腳步,在近些年取得了很大的進展,包括紅外技術IR[1]、無線局域網WLAN[2]、藍牙技術Blue Tooth[3]、計算機視覺Computer Vision[4]、WIFI[5]、ZigBee[6]和地磁Magnetic等等。而慣導輔助地磁的室內定位技術是最近幾年才提出來的一項新型的室內定位手段,其突出優(yōu)勢在于可高精度、長時間、抗干擾地為室內定位系統(tǒng)提供實時、連續(xù)、精準的位置信息,且安全可靠,成本低廉,對環(huán)境要求低。只需要通過地球提供的固有地磁場信息,利用Android智能手機內置的傳感器即可實現(xiàn)室內定位。
目前,國內外文獻主要是研究用于地磁定位中的地磁匹配算法及其相關仿真研究[7-10],對于地磁定位技術用于手機的相關研究較少,而今是移動互聯(lián)網技術發(fā)展的高峰期,對手機的室內定位的需要是空前巨大的。谷歌、微軟、蘋果、博通等在內的一些科技巨頭,還有一些世界有名的大學都紛紛致力于室內定位技術方向的研究,其中包括采用有源RFID技術的電子標簽Qubulus;杜克大學開發(fā)了通過采用遞歸、過濾和“無形的路標”等方式進行定位的UnLoc;Google公司通過手機基站、GPS及Wi-Fi信號獲得室內精確定位;北京郵電大學鄧中亮教授提出的TC-OFDM定位與通信融合的新型信號體制,這是一種通過慣導與通信網相結合的室內定位方式;李燕君[11]等人就WIFI室內定位展開了深入研究,但需要實現(xiàn)對位置指紋庫進行建立和維護;丁海強[12]等人針對基于RSSI的無線傳感網絡定位算法精度不高的問題提出一種負約束條件下的似然估計定位算法,獲得較高精度,但此種定位方式需要在室內至少鋪設三個以上的物聯(lián)網節(jié)點構成無線傳感網絡。通過分析,可以發(fā)現(xiàn)這些定位方式均需要另外架設相應設備,這無疑給室內定位帶來了局限性;同時這種有源信號又會受到建筑物的影響,衰減快,能耗大,不適用于手機終端室內定位。
本文從一種新的角度提出了基于慣導與地磁組合的定位算法方式進行手機室內定位,并設計了相應的手機定位軟件,在不依賴于外部設備的同時,還能達到一個高精度的定位效果。
1 慣導輔助地磁室內定位原理
2003年Boles等人就區(qū)域的地磁斑圖進行了相應的研究,并分析了利用地磁導航的可行性[13],隨后Janne Haverinen等[14]提出了在煤礦下環(huán)境下的基于地磁異常的定位技術,并通過仿真實驗分析了利用地磁信息進行室內定位的可行性。
地磁匹配定位技術需要構建地磁基準圖,其存儲數(shù)據較大,匹配時間較長,加入慣導技術能有效縮小匹配范圍,提高匹配率和實時性,首先通過高精度的三軸磁力計(本文中使用手機)對區(qū)域的地磁數(shù)據進行掃描,獲得區(qū)域的地磁基準圖信息,并上傳服務器。進行地磁匹配定位時,需要將服務器上的地磁基準圖導入到手機中,構建手機內部地磁基準圖。當載體運動到室內定位環(huán)境下時,由慣性導航系統(tǒng)中得到定位的相對位置,基于這個相對位置能從地磁基準圖中搜索出一個新的局域地磁基準圖,由手機內置磁傳感器實時地測量所處位置的磁矢量,將測量磁矢量與局域地磁基準圖進行相應的匹配,使用地磁匹配算法處理后的數(shù)據返回到用戶手機中,將用戶所在位置顯示手機平面地圖上,從而實現(xiàn)手機用戶實時顯示自身的位置,地磁匹配系統(tǒng)框圖如圖1所示。
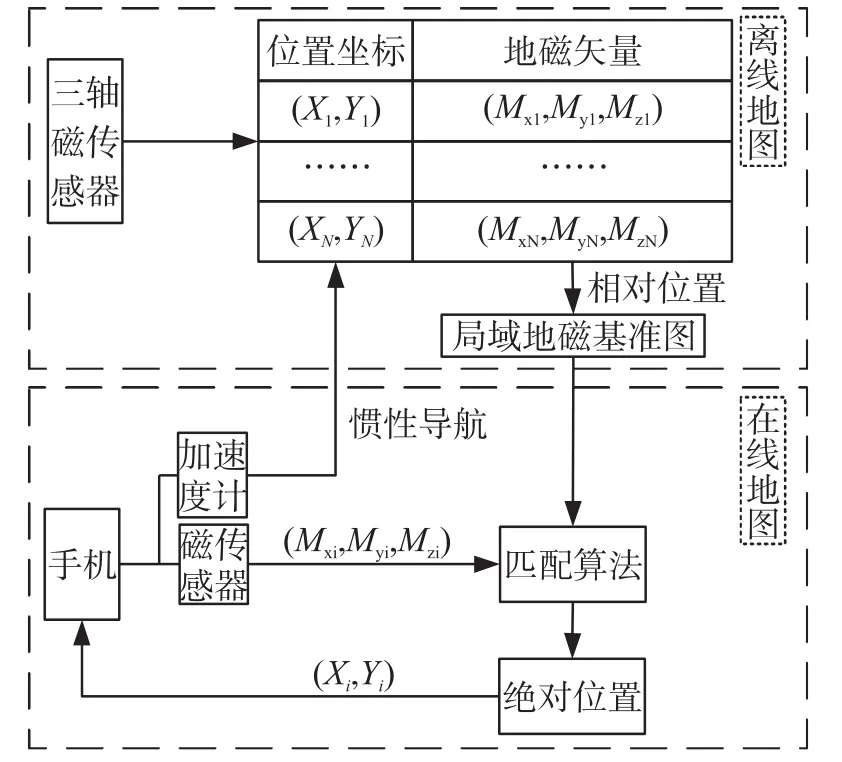
圖1 地磁匹配定位系統(tǒng)框圖
慣性導航系統(tǒng)主要原理是通過將載體在慣性參考系的加速度對時間進行積分,從而獲得一個三維空間的相對位置,其系統(tǒng)框圖如圖2所示。
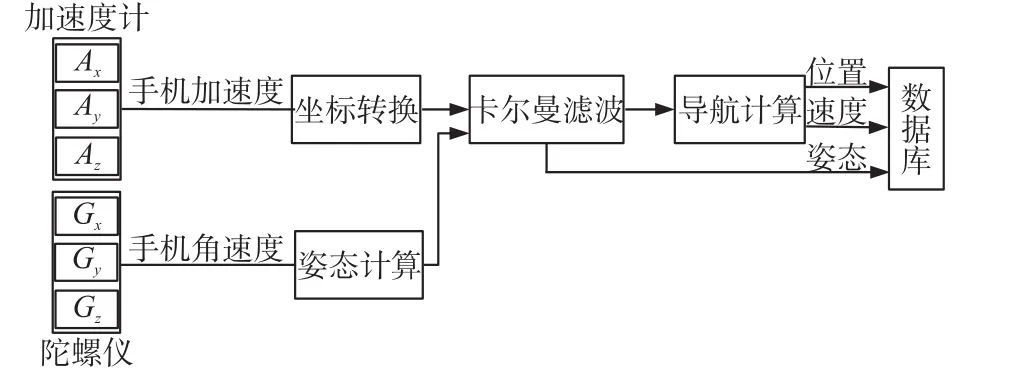
圖2 慣性導航系統(tǒng)示意圖
根據手機加速度計獲取的3個線加速度數(shù)值,經過坐標變換,導航計算,即可得到手機的位置、速度、姿態(tài)等導航信息[15]。
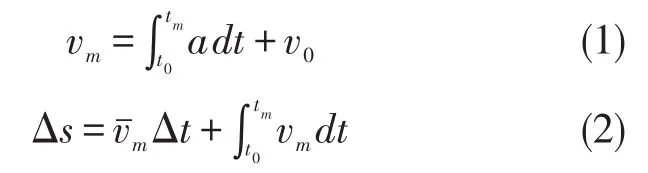
式中:v0,vm分別表示t0,tm時刻手機線速度,a為手機一個方向上的加速度,為t0到tm的平均速度,Δs為手機的相對位移。
2 慣導輔助地磁室內定位算法
前面闡述了慣導結合地磁定位的基本原理,接下來針對定位算法進行分析,不同經緯度和高度下地球表面地磁場強度異同,這種異同就構成了不同經緯度和高度下的一種矢量特征;同時高精度低成本的手機內置傳感器的出現(xiàn),使得這項地磁定位技術應用到手機上提供了可行性,于是地磁匹配算法設計便是本論文地磁室內定系統(tǒng)的關鍵,合適的地磁匹配算法將能明顯提高系統(tǒng)的定位效率和匹配的準確率。
2.1 最小距離度量法
若用2個向量Nuv和m的間距的某一個范數(shù)||ε||來表示它們之間的相似程度,則可以得到相似度度量算法的最小距離度量法,其中,最小距離度量法各匹配算法的定義如下[7]:
AD(絕對差法):

MAD(平均絕對差法):

SD(平方差法):

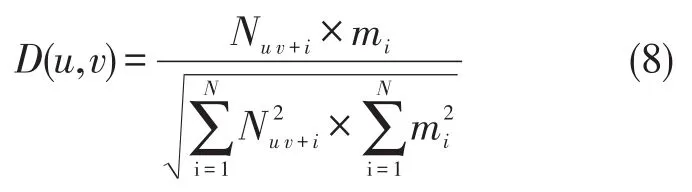
MSD(平均平方差法):

上式中的Nuv表示基準圖中位置(u,v)上的N維特征向量;m表示實時測量的N維特征向量;N表示相關數(shù)據的總點數(shù);D(u,v)為地磁匹配相關函數(shù),Nuv+i表示基準數(shù)據庫的位置(u,v+i)上的特征量,mi表示實時測量的第i個特征量。
2.2 相關度量法
相關度量法用向量m和Nuv之間的夾角θ來度量實時向量和基準子向量之間的相似程度。為了便于計算,通常采用θ的某一個合適的函數(shù)(如cosθ)來定義相似度。相關度量法主要分為積相關法和歸一化積相關法兩類[7]。
PROD(積相關法):

NPROD(歸一化積相關法):
2.3 慣導輔助MSD算法
地磁場是地球上的自然場之一,它是一個矢量場,隨著所處位置以及時間的改變發(fā)生變化。傳感器測量中獲得的地磁矢量是由不同的場源產生的磁矢量之和,地磁場來源于三種磁源,分別是主地磁場(Mm)、地殼地磁場(Mc)以及干擾地磁場(Md)。綜上所述,傳感器測得的磁場的大小和方向的關系如式(7)所示[16]:

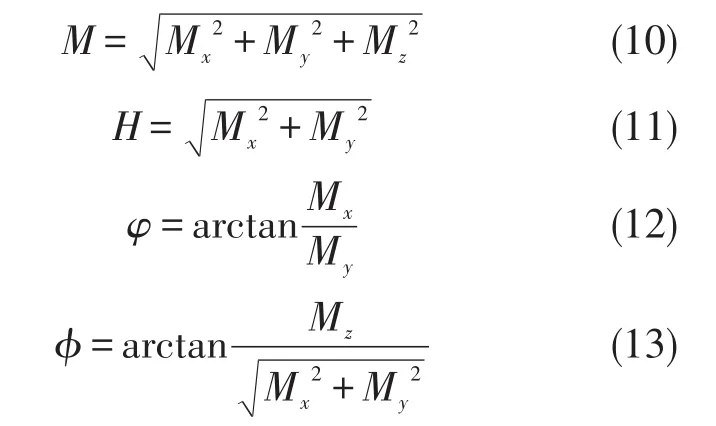
一般描述地球磁場時,會用它的總場強以及每個分量,磁場總場強用M表示,將它投射到東北平面得到H,稱作水平強度;將H投射到東西向軸,得到東西向場強Mx;同理,將H投射到南北向軸,得到南北向場強My;其中φ表示磁偏角,?表示磁傾角,各物理量的表示如圖3所示。
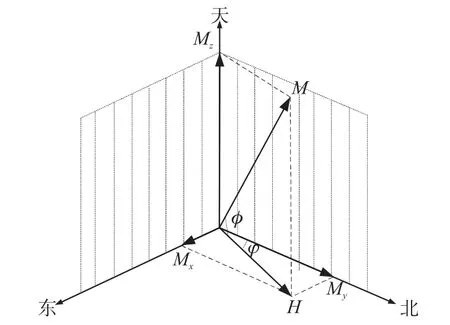
圖3 地磁場元素圖
M、H、φ、φ四要素與M在三個軸上投影(Mx,My,Mz)的關系如式(8)~(11)所示[17]。
由上式就可以得到地理磁場的基本特征量,根據地磁場的兩個特點,①地磁場是由主磁場和其他磁場組成,②其方向是由地磁北極(地理南極)指向地磁南極(地理北極),綜合分析驗證得到地磁矢量從載體坐標系下轉換到導航坐標系下時,東西方向磁場分量Mx近似為零。
文獻[18]研究了地磁匹配技術幾種基本匹配算法,通過幾種匹配算法MAD法、MSD法、PROD法和NPROD法的對比仿真實驗,發(fā)現(xiàn)選擇MAD法或MSD法作為地磁匹配算法較好,匹配精度更高、匹配運算量更小和匹配誤差收斂性更好。
由此,本文提出改進型的慣導輔助MSD地磁匹配的算法來進行室內定位,其算法流程如圖4所示,首先通過慣導計算出載體在導航坐標系中的粗略的位置信息,利用這個相對位置從地磁基準圖中搜索出局部地磁基準圖,進而通過地磁矢量的異同進行室內地磁匹配定位,以獲取準確的位置參數(shù),從而現(xiàn)實室內實時精準定位。
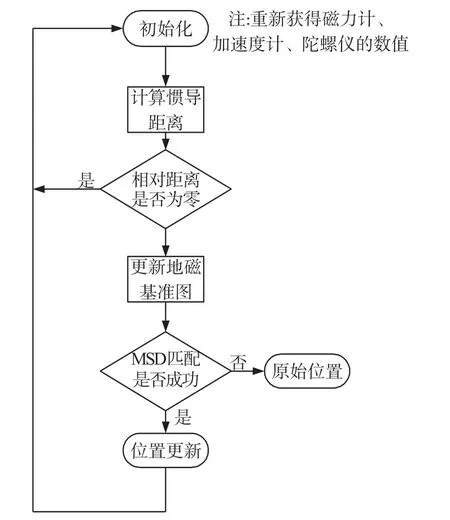
圖4 定位算法流程圖
3 地磁定位關鍵技術
為了有效實現(xiàn)基于慣導輔助地磁定位,除了要解決上述地磁定位研究中的關鍵問題外,還需嘗試從以下幾個方面進行技術攻關克難。
3.1 精確地磁基準圖的構建
能否精確地獲得地磁基準圖是室內定位精準與否的關鍵所在,地球上每個經緯度上地磁矢量是不同的,而相隔很近的兩點地磁矢量相差不大,這就會給地磁匹配算法增加一定的難度,在不增加匹配算法的計算量前提下,要想獲得相對較高的定位精度就需要獲得一個精準的地磁基準圖,即采用精度較高的三軸磁傳感器設備直接獲得三維的地磁矢量,本文將被測區(qū)域人為劃分成1 m×1 m的網格,在網格頂點處使用三軸磁傳感器(本文中使用手機)測量地磁矢量并存入數(shù)據庫中,即生成一個網格狀的地磁基準圖,根據點對點的原則能將MSD地磁匹配的精度提高到1 m左右,同時通過慣導獲得的相對位置,更新地磁基準圖,減少了匹配量,提高了定位的實時性。
3.2 合適的地磁匹配算法
目前,地磁匹配算法分為很多類,包括前面提到的最小距離度量法和相關度量法,以及本文提出的改進型的慣導輔助MSD地磁定位算法,本文結合MSD地磁匹配算法的優(yōu)點,拓展為慣導輔助MSD地磁定位算法,既提高室內定位的精度,還減少地磁匹配運算量,提高室內定位的實時性。
4 慣導輔助地磁定位實驗
在完成了前期的一系列研究工作后,根據改進型的慣導輔助MSD地磁定位算法及其執(zhí)行過程,對慣性導航輔助地磁定位技術運用于室內定位的定位效果進行實驗研究。
4.1 實驗環(huán)境設置
實驗選擇在大型的購物中心(武漢奧山世紀城)進行室內定位導航,購物中心面積大約25萬m2,實驗位于面積大約是300 m×200 m的A區(qū),整個實驗過程的路徑選擇是從商場的5號門進入,在第1個路口左拐,第2個路口右拐,第3個路口再左拐,最后從商場4號門出去,實驗記錄了室內定位導航的整個過程,其實驗路徑選擇如圖5所示。
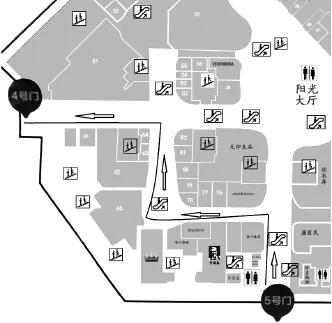
圖5 實驗路徑選擇圖
4.2 慣導與慣導輔助地磁定位的對比仿真
本文對慣導輔助地磁定位算法與慣導定位算法進行了對比性仿真實驗,如圖6所示。在MATLAB仿真環(huán)境下初始化載體運動路徑,其中綠色線表示實際路徑,藍色線所示慣導算法得到的路徑,紅色線表示慣導輔助地磁定位的路徑,由于加速度的偏移慣導會越來越偏移實際路徑,造成與實際路徑的誤差越來越大,但是利用慣導輔助地磁定位能一定程度上減少漂移誤差。

圖6 慣導定位和慣導輔助地磁定位的對比仿真
4.3 MSD地磁匹配算法實驗
建立地磁基準圖時要遍歷整個區(qū)域,將區(qū)域劃分為網格,并在網格的頂點處進行地磁矢量的測量,產生一個網格狀的地磁基準圖。首先,在Android手機上獲取地磁傳感器數(shù)據,通過姿態(tài)解算將地磁矢量分解到地球坐標系的三個方向,X軸方向磁場分量近似為零,可忽略,即可將地磁矢量從三維量轉化為二維量。然后,本文選擇MSD地磁定位算法進行了相應的定位匹配測試,其中Y軸分量,Z軸分量表示地磁矢量,X坐標,Y坐標表示當前手機所處絕對位置,其測試結果如圖7所示。
4.4 慣性導航輔助地磁室內定位實驗
首先設置一個初始點,利用前面所述的改進型的地磁定位匹配算法進行室內定位,通過分析地磁匹配算法用于室內定位的有效性,結合慣性導航技術思路進行位置估計,在估計位置區(qū)域內使用局部地磁搜索并匹配的原則,設計了手機室內定位應用程序,并對定位效果進行了測試,整個室內定位實驗過程使用視頻記錄,視頻總歷時3 min 40 s,圖8為每隔20 s取的視頻截圖一次,其中背景為商場的周圍情景,右下角是小米2 s的屏幕截圖,藍色的圈圈表示定位點,表示手機當前位置,如圖8所示。
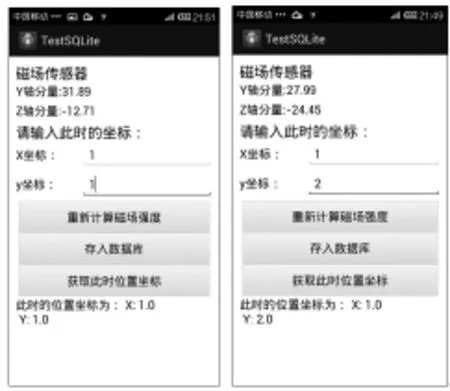
圖7 地磁匹配算法測試
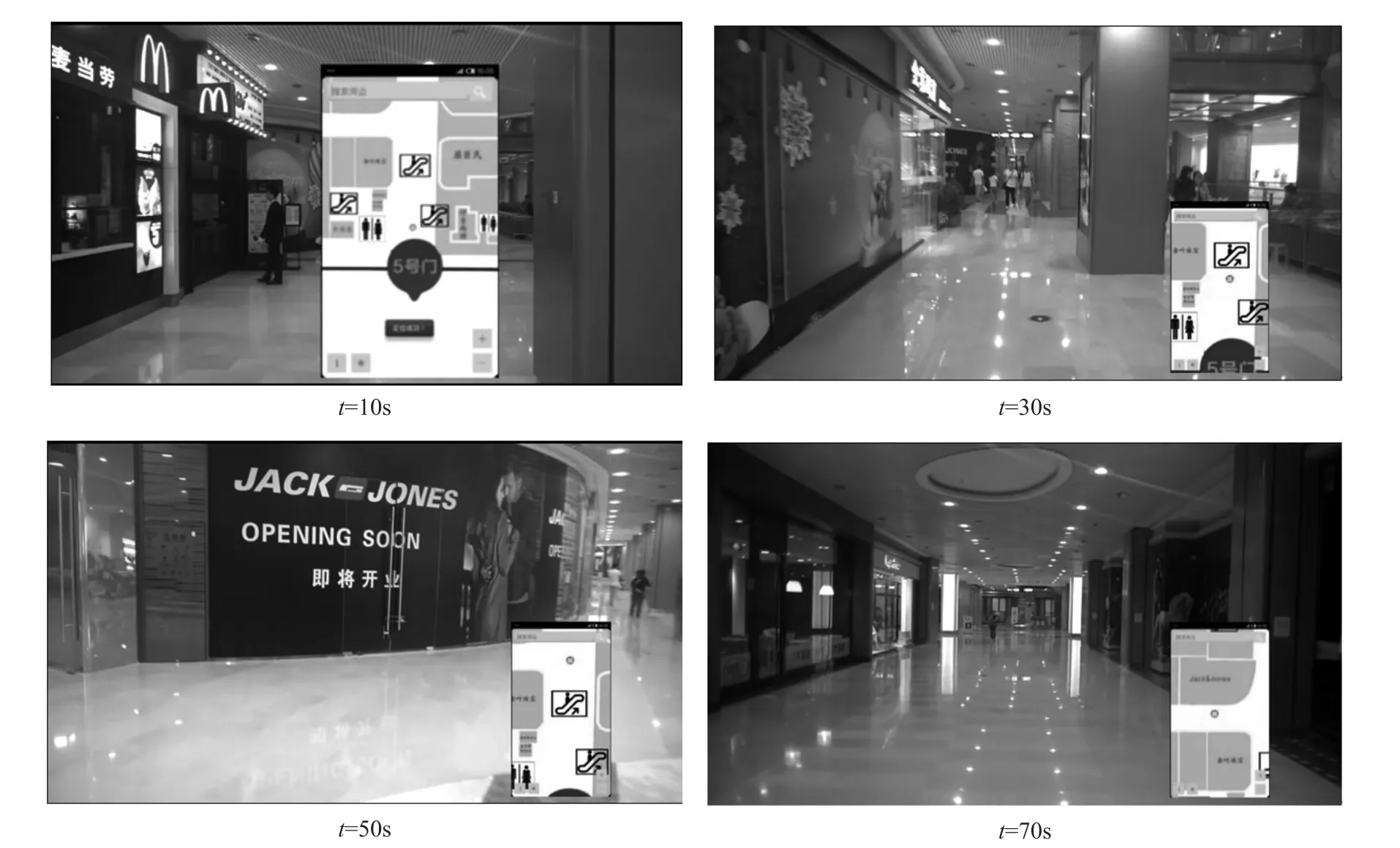
圖8 實驗定位效果
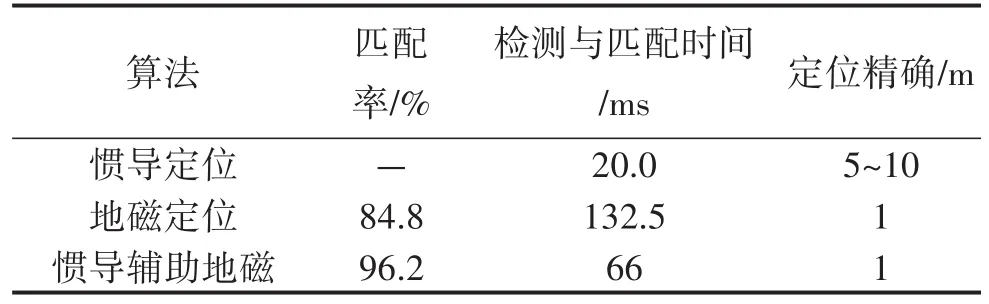
表1 定位匹配算法比較
由表1可以看出慣導輔助地磁定位算法可以提高10%的地磁匹配率,且減少了一半的檢測與匹配時間,同時定位精度達到了1 m,使用慣導輔助地磁算法更能滿足室內定位精度和實時性要求。
5 結束語
從實驗可以看出室內定位使用慣導輔助地磁的技術是可行的,通過測量區(qū)域內的地磁信息,建立較精準的地磁基準圖,利用慣性導航技術進行相對定位,獲得移動載體的三維空間中的相對位置,在此基礎上縮小地磁基準圖的匹配范圍,減少地磁匹配計算量,使用地磁匹配算法MSD進行絕對定位,就能獲得較好的室內定位精度,同時不依賴于外界設備。此方式適用于商業(yè)中心、會展中心以及地下停車庫等的室內定位,定為精度可以達到1.0 M,其商業(yè)市場價值巨大。
[1]王小輝,汪云甲,張偉.基于RFID的室內定位技術評述[J].傳感器與微系統(tǒng),2009,28(2):1-3.
[2]張明華.基于WLAN的室內定位技術研究[D].上海:上海交通大學計算機應用技術,2009.
[3]王小好.基于藍牙無線技術的室內定位方法的研究[D].浙江:浙江工業(yè)大學信號與信息處理,2007.
[4]于秀芬,段海濱,龔華軍.移動機器人視覺定位方法的研究與實現(xiàn)[J].數(shù)據采集與處理,2004,19(4):433-437.
[5]吳沖,蘇兵,焦筱俊,等.基于改進動態(tài)RSSI算法的WIFI室內定位研究[J].常州大學學報,2014,26(1):32-36.
[6]倪瑛,戴娟.ZigBee定位技術的研究[J].南京工業(yè)職業(yè)技術學院學報,2013,13(2):43-45.
[7]李夢琳,徐俊,張賀.地磁匹配導航算法及延拓研究[J].科技視界,2013,3(27):34-35.
[8]王欣,張亞君,陳龍.一種基于環(huán)境磁場的室內移動人員定位方法[J].杭州電子科技大學學報,2013,33(3):1-4.
[9]周瑩瑩,張延順,郭磊.地磁/慣導組合導航系統(tǒng)半物理仿真研究[J].控制工程,2011,18(s1):15-18.
[10]黃玉,郝燕玲.基于磁矩信息的水下地磁連續(xù)定位算法[J].上海交通大學學報,2012,46(3):390-393.
[11]李燕君,徐凱鋒,邵劍集.利用眾包更新Wi-Fi室內定位指紋庫的方法研究[J].傳感技術學報,2014,27(12):1692-1698.
[12]丁海強,齊光快,莊華亮,等.基于負約束條件下最大似然估計的無線傳感網絡定位算法[J].傳感技術學報,2014,27(11):1545-1550.
[13]Boles LC,Lohmann KJ.True Navigation and Magnetic Maps in Spiny Lobsters[J].Nature,2003,421(13):60-63.
[14]Haverinen J,Kemppainen A.A Geomagnetic Field Based Positioning Technique for Underground Mines[C]//International Symposium on Robotic and Sensors Environments,2011:17-18.
[15]樊啟高,李威,王禹橋,等.一種采用捷聯(lián)慣導的采煤機動態(tài)定位方法[J].煤炭學報,2011,36(10):1758-1761.
[16]McLean S,Macmillan S,Maus S.The US/UK World Magnetic Model for 2005-2010[J].NOAA Technical Report NESDIS/NGDC-1,2004,12(5):12-15.
[17]李龍鳴.地磁導航算法研究[D].哈爾濱:哈爾濱工業(yè)大學控制科學與工程控制,2013.
[18]謝仕民,李邦清,李文耀,等.地磁匹配技術及其基本匹配算法仿真研究[J].航天控制,2008,26(5):55-59.

宋 鏢(1990-),男,湖北孝感人,碩士研究生,于2010年在武漢科技大學獲得學士學位,研究方向為機器人視覺伺服控制,584811733@qq.com;

程 磊(1976-),男,湖北武漢人,教授,主要研究方向為機器人及復雜系統(tǒng)、現(xiàn)任中國人工智能學會青年工作委員會常務委員,湖北省人工智能學會理事;主持包括國家自然科學基金在內的省部級及以上縱向項目9項;獲國家教學成果二等獎1項,國際國內學術論文獎6項;發(fā)表論文40余篇,其中三大索引收錄24篇,chenglei@wust.edu.cn;

吳懷宇(1961-),男,湖北武漢人,教授,主要研究方向為服務機器人及其控制;主持國家及省部級基金7項;獲省部級科技進步一等獎2項;教育部科技成果鑒定2項;獲湖北省自然科學優(yōu)秀學術論文一等獎1項;國家發(fā)明專利2項,實用新型專利2項;專著1部;發(fā)表論文50余篇,其中SCI收錄5篇,EI收錄30篇,ISTP收錄17篇,wuhy@wust.edu.cn。
The Design of Cellphone Indoor Positioning System Based Magnetic Assisted Inertial Navigation Technology*
SONG Biao,CHENG Lei*,ZHOU Mingda,WU Huaiyu,CHEN Yang
(Engineering Research Center of Metallurgical Automation and Measurement Technology,Ministry of Education,Wuhan University of Science and Technology,Wuhan 430081,China)
To implement indoor positioning,sufficient signal nodes fast attenuated by the interference of the construction and consequently cause the low positional accuracy,are mostly required.In order to avoid the existing problem,by further studying the technologies of indoor positioning,a positioning algorithm with inertial navigation technology assisted geomagnetic matching that suits for cellphone terminal indoor positioning is presented.Different from the traditional outdoor positioning system,by taking advantage of differentiated information of Earth's magnetic field at different points and selecting an appropriate geomagnetic matching algorithm,the indoor positioning of cellphone devices without depending on external devices can be achieved,simultaneously applying the combined localization method of inertial navigation-assisted geomagnetic positioning improve the indoor positioning accuracy.Finally,a cellphone indoor positioning software which is based on Android platform is novelly and successfully designed with mobile built-in sensors,Simulations and experiments show that this localization method is effective.
geomagnetic application;sensor;indoor positioning;inertial navigation;android
TP317
A
1004-1699(2015)08-1249-06
??5100
10.3969/j.issn.1004-1699.2015.08.025
項目來源:國家自然科學基金項目(60705035,61075087,61203331);湖北省重點實驗室開放基金重點項目(Z201102);河南省高等學校控制工程重點學科開放基金項目(KG2011-01);湖北省教育廳科研計劃重點項目(D20131105);湖北省科技計劃自然科學基金重點項目(2010CDA005)
2015-01-07 修改日期:2015-05-18