CATIA動力學仿真在起落架裝配中的應用
2020-05-29 09:02:18李思強張莉
科技視界 2020年11期
李思強 張莉

摘 要
本文應用大型三維建模軟件CATIA建立了某大型民機前起落架及艙門的三維實體模型, 利用CATIA中的數字樣機(Digital Mock-Up, DMU)進行起落架收放的運動仿真,利用傳感器的碰撞試驗功能檢測在運動過程中各零件之間是否干涉,并通過測量工具測量分析了起落架與艙門在運動過程中的最小間隙,描繪了起落架在運動過程式中所掃掠的空間范圍,以實現與起落架艙干涉檢查,通過仿真以確定鎖機構裝配的位置。動力學仿真實現數字樣機的實際工作過程中的運動模擬, 為起落架裝配提供了一定的技術支持。
關鍵詞
起落架;CATIA;DMU;運動仿真;建模
中圖分類號: V226 ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.11.023
0 概要
飛機起落架是飛機起飛、著陸、滑行和地面支撐、停放的主要裝置。大多數軍用和民用飛機在起飛著陸過程中起落架都要進行收放運動并且要求飛機在飛行中必須實現起落架收上狀態的鎖定功能,以保證起落架在收上狀態的安全鎖定。因此,起落架收放運動檢測、干涉檢查及鎖機構的位置的準確性,成為起落架裝配的重點。DMU電子樣機是對產品的真實化計算機模擬,滿足各種各樣的功能,提供用于加工或裝配的模擬環境。本文以某型號飛機前起落架為例,建立虛擬樣機模型,并賦予了每個部件相互間的裝配關系,進行理論分析和方法研究,使技術人員在起落架工藝裝配和方法決策時,能對復雜的起落架模型進行裝配空間觀察、安裝/拆卸、干涉檢查和機構運動模擬,以減少實物樣機的預裝配與驗證。
1 使用運動機構模擬模塊對KIN(CATIA DMU Fitting simulator)對起落架及艙門的收放運動建立動力學模型
以某大型民用飛機前起落架為例,建立虛擬樣機的動力學模型。
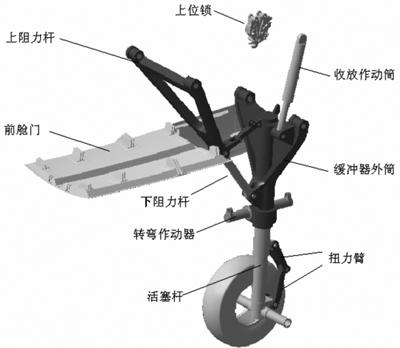
前起落架結構為支柱雙輪式,安裝在位于機頭下部的前起落架艙內,向前向上收入前起落架艙內。前起落架主要包含以下結構:可折阻力桿、下位撐桿鎖和開鎖作動筒、減震支柱、轉向機構、機輪軸、收放作動筒、上位鎖等組成,如圖1所示。
將CATIA的裝配模塊中的數模調入到運動機構模擬模塊KIN,再根據各零件之間的運動關系在該模塊中定義相應的運動副。
1.1 前起落架主要結構特點如下
a)后艙門采用隨起落架外筒聯動的形式,起落架放下時后艙門打開,起落架收起時后艙門關閉。
b)前艙門采用單獨的液壓作動筒驅動方式,當前起落架處在完全放下和收上位置時前艙門均處于關閉狀態。
c)前起落架鎖包括艙門鎖和起落架支柱鎖。
d)前起落架前傾角3度,向前向上收起102度收入到前起落架艙內。
1.2 定義運動副,限制自由度
經分析,起落架收放機構與前艙門收放機構均可獨立仿真,機構要實現運動仿真需滿足自由度為零(即DOF=0)的條件,必須滿足下列公式
F = 6n -Σpi -Σ(x)qj-Σrk = 0 ? ? ? ? ? ? ? ? ? ? (1)
式(1)中:n為活動構件總數;m為運動副總數;x為原動機總數;Pi為第i個運動副的約束條件數;qj為第j個原動機的驅動約束條件數;rk為其他的約束條件數。
收放機構與前艙門收放機構均可獨立仿真,因此各機構自由度均為零(DOF=0)。
1.3 定義驅動命令
將各機構的運動副定義以后,還不能進行運動模擬分析,需要加載驅動。一個機構要想運動,通常會有一個或多個驅動,具體要根據機構形式而定。可以在第2步定義約束的同時進行驅動命令的定義。例如對于圓柱副,既可以定義角度驅動,又可以定義長度驅動,或者同時定義角度驅動和長度驅動。在本文中給前艙門運動機構中添加艙門作動筒之間的圓柱副的長度驅動,具體驅動值如圖2 所示,在起落架收放運動機構中添加上阻力桿與前起艙的旋轉運動副的旋轉角度驅動,具體驅動值如圖2 所示。驅動加載完畢后,CATIA會彈出一系統信息,提示可以進行運動模擬,即可以進行后期的運動分析了。
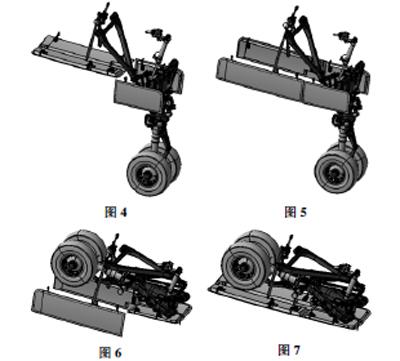
1.4 進行運動仿真
給起落架收放機構前艙門開關機構添加約束和命令使之后可以實現運動仿真,仿真結果如下四幅圖,前艙門打開→前起落架收起(后艙門跟著一起關閉)→前艙門關閉。
2 基于運動仿真的數字樣機分析
在動態仿真過程中,KIN模塊通過運動中的傳感器測量的數據來分析檢查運動過程中的樣機的運動情況,常用以下幾個命令 Clash(碰撞分析);Distance & Band Analysis(距離和區域分析)等。
2.1 運動空間分析
運動過程中空間尺寸非常重要,要保證所設計的產品在運動過程中對其它零件不發生干涉,設置傳感器來監測動態仿真過程,比如間隙值、碰撞、速度和加速度等。
由于設計方案的原因,在前起落架收起相同的角度的情況下,齒輪齒條轉向裝置可能會與艙門干涉,不能滿足前起落架的收放要求。所以設置距離傳感器,進行收放仿真,分析運動過程中兩部件的間隙是否滿足要求。
設置分析對象為齒輪齒條的邊緣,參考物體分別為前后艙門,仿真運動生成的軌跡線如圖6所示,輸出文件的曲線如圖7所示。從圖中可測出在運動過程中齒輪齒條邊緣離艙門的最近距離,驗證是否符合要求。
2.2 確定上位鎖的位置
在前起落架收放時,從前傾角3度,向前向上收起102,用CATIA運動仿真模塊中的“軌跡”命令作出此點的軌跡曲線(如圖2),即可利用運動仿真得出起落架上位鎖的位置。
2.3 包絡體分析
描繪了起落架在運動過程式中所掃掠的空間范圍,以實現與起落架艙干涉檢查,如圖9和圖10所示,確定前起艙的空間是否足夠容納起落架運動。
3 結束語
起落架零部件雖然沒有整機那樣復雜,但使用CATIA V5中的DMU功能同樣幫助工程師快速解決零裝配過程中最為關鍵的空間尺寸,運動干涉等問題,無疑可以減少產品的裝配成本,提高了效率。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
海峽姐妹(2020年9期)2021-01-04 01:35:44
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
山東青年(2016年1期)2016-02-28 14:25:25
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
當代修辭學(2014年3期)2014-01-21 02:30:44
公務員文萃(2013年5期)2013-03-11 16:08:37
