納米時柵傳感器高精度激勵信號源研究與設計*
2015-11-18 04:49:47鄭方燕馮濟琴陳自然
傳感技術學報 2015年7期
關鍵詞:信號
黃 沛,鄭方燕,馮濟琴,陳自然
(重慶理工大學機械檢測技術與裝備教育部工程研究中心;時柵傳感及先進檢測技術重慶市重點實驗室,重慶 400054)
納米時柵傳感器高精度激勵信號源研究與設計*
黃 沛,鄭方燕*,馮濟琴,陳自然
(重慶理工大學機械檢測技術與裝備教育部工程研究中心;時柵傳感及先進檢測技術重慶市重點實驗室,重慶 400054)
納米時柵利用正交變化電場構建的運動參考系進行測量,激勵信號精度直接影響運動參考系勻速性,進而影響測量精度。針對納米時柵需要高精度激勵信號的要求,設計了一種采用閉環控制結構的高精度激勵信號源,該信號源采用單片FPGA實現總體控制,完成采集控制、數據處理和波形數據產生等功能,利用16位高精度數據轉換器構建信號發生電路及反饋電路,保證了對信號的精確控制。測試結果表明:輸出正弦信號幅值精度為0.01%,相位精度為0.1%,并將納米時柵原始精度從1.4 μm提高至0.9 μm。
納米測量;時柵;閉環控制;FPGA;信號源
納米位移測量技術及器件是納米數控機床、極大規模集成電路專用設備和國防軍工特殊需求等超精密高端制造裝備的核心技術和關鍵功能部件,是實現納米精度定位與控制的“眼睛”,直接決定和影響著主機的性能[1]。傳統的電感式、電容式等位移測量方法難以實現大量程[2-3],光柵和激光干涉儀又有各自的技術瓶頸和嚴苛的環境要求[4-6],高測量精度和大測量范圍難以同時兼顧[7]。為克服這一矛盾,作者所在團隊在前期研究的磁場式時柵傳感器的基礎上提出一種基于交變電場的納米時柵位移傳感器[8-9]。
納米時柵傳感器由定尺和動尺組成,在定尺極片上施加兩路相位相差90°的交變電壓信號作為激勵源產生交變電場,通過動尺極片感應交變電場進行測量。根據納米時柵的測量原理,兩路激勵信號幅值是否相等,相位差是否準確控制在90°,都將影響合成的行波信號質量,進而影響傳感器的測量精度[9]。我們先后采用通用函數信號發生器,以及借助虛擬儀器平臺開發的激勵信號系統[10]作為納米時柵激勵源,但精度均不能滿足納米時柵的需求。基于上述情況,本文設計了一種采用閉環控制結構的應用于納米時柵的高精度激勵信號源。
1 納米時柵信號精度分析
1.1 納米時柵測量原理
納米時柵傳感單元由激勵定尺和感應動尺兩部分構成,其結構如圖1(a)所示。定尺由兩排矩形金屬極片構成,如圖1(a)中的1所示,各排極片的奇數號極片連在一起,偶數號極片連在一起,可獲得強弱交替分布的電場信號。上下兩排極片的起始位置相差1/2極片寬度,形成空間正交結構,通過對定尺極片施加激勵產生電場。動尺由兩排正弦形金屬極片構成,如圖1(a)中的2所示,極片寬度與定尺極片寬度相等。動尺極片以兩個極片寬度為周期均勻排布,與相鄰的兩定尺極片形成差動電容,電路模型如圖1(b)所示。

圖1 納米時柵工作原理
如前述結構,定尺上下兩組差動電容分別連接相位相差90°的等幅等頻正弦激勵電壓Uia、Uib:

定尺極片上形成時間正交的運動電場。在動尺沿定尺移動的過程中,差動電容的正對面積S隨位移x呈正弦規律變化,由于采用變面積測量方式,電容值與正對面積具有良好的線性[11],則兩組差動電容值可表示為:

式中:Cm為最大電容值,W極距,x為相對位移。通過差動電容耦合,動尺極片上得到兩路駐波信號可表示為:

式中:Ke為電場耦合系數,將兩路駐波信號矢量疊加后可得行波信號Ux:

由式(9)可知,動尺與定尺的相對位移量被調制到行波相位上,行波信號Ux經過放大、整形后得到包含相位信息的方波信號,然后與一路同頻參考信號Ur比相,再通過高頻時鐘插補得到兩路信號的相位差,經計算后即可得到動尺移動的位移值。
1.1 激勵信號對測量精度的影響
根據上述測量原理,定、動尺之間的相對位移量與納米時柵獲得的相位差信息具有唯一對應關系,而相位差信息與信號的幅值和相位具有直接相關關系,與信號的頻率無關。以下對幅值和相位的變動對測量值的影響關系作一具有分析,若在激勵信號Uib中引入幅值誤差ΔUm和相位誤差Δφ后,式(2)可改寫為:

進而合成的行波表達式為:

對比式(9)和式(11)可知,激勵信號幅值誤差和相位誤差都被傳遞至行波信號中,并在行波表達式中形成誤差項。所以對于兩路激勵信號,不管是幅值不相等還是相位差不滿足嚴格的90°,都將影響位移調制的線性度,帶來測量誤差。
1.2 激勵信號誤差來源
本信號源采用DDS(直接數字頻率合成)技術產生激勵信號,需要經過波形數字化、D/A轉換、放大濾波三個步驟,對應的誤差來源分別是數字化過程中的量化誤差、D/A轉換非線性誤差和模擬器件參數不一致帶來的誤差。量化誤差主要取決于分辨率,高精度D/A轉換器均具有16位及以上的分辨率,非線性誤差也處于±1 LSB水平,而常規精密電阻誤差為0.1%,精密電容誤差為1%。設計的輸出信號頻率為20 kHz,系統時鐘頻率為240 MHz,選用的D/A轉換器的分辨率為16位。計算出在單個參數影響下的最終輸出信號相對誤差如表1所示。

表1 單個參數影響下的輸出信號誤差
根據輸出信號誤差數據可知,信號源誤差主要來自于電阻、電容等模擬器件的制造誤差,而數字控制部分則可以達到較高的精度。因此,采用閉環控制結構對模擬器件導致的誤差進行數字化修正,是提高信號源精度的有效方法。
2 激勵信號源電路設計
為了實現兩路信號頻率、幅值及相位的精確控制,采用了閉環控制電路來產生兩路正交的正弦信號,結構如圖2所示,通過信號反饋電路實時采集輸出信號的幅值、相位信息,由控制電路根據反饋數據修正幅值、相位誤差,并將修正后的數據送入信號發生電路,產生納米時柵激勵信號。通過此閉環控制結構減小信號傳遞過程中的誤差,將時間基準及電壓基準的精度有效傳遞至輸出信號。

圖2 信號源閉環控制結構圖
2.1 控制電路
主控制電路采用集成化的設計思路,以FPGA為核心,利用其豐富的片上資源,將采集控制、數據處理和DDS數據產生幾大模塊集成到單芯片上,縮減了電路規模,便于實現高并行度的信號處理和控制任務[12]。FPGA芯片選用EP3C25E144I7N,含有24 624個邏輯單元,滿足運算及控制的資源要求,同時采用高精度(0.5×10-6)的晶體振蕩器作為系統時鐘源,保證了輸出信號的頻率穩定性,為納米時柵提供了高精度的時間基準。控制電路結構框圖如圖3所示。

圖3 控制電路
2.2 信號發生電路
信號發生電路將數字化的波形數據轉換為模擬正弦信號,其輸出信號直接用于激勵納米時柵傳感器,無需功放等驅動電路。設計的信號發生電路主要包括D/A轉換、放大、濾波三個功能模塊電路,如圖4所示。D/A轉換器選用雙通道、16位的AD5547,在兼顧轉換速率的同時,保證了較高的電壓分辨率,為實現對輸出信號幅值的精確控制打下基礎。傳感器感應信號Uoa、Uob比較微弱,通過放大電路將激勵信號放大,使感應信號能夠滿足采集要求。由于納米時柵采用電容作為直接信號耦合通道,對高頻噪聲比較敏感,所以需要對放大后的信號進行濾波。設計了二階有源低通濾波器進行濾波后,信號有效地應用于激勵納米時柵傳感器。

圖4 信號發生電路
2.3 信號反饋電路
在閉環控制回路中,反饋電路完成對輸出信號的采集,并以此為基準對輸出信號進行調整控制。反饋電路是信號源設計的關鍵環節,也是輸出信號高精度的重要保證。通過閉環反饋控制可以消除信號發生電路中放大及濾波環節引入的元器件參數誤差。如圖5所示,信號反饋電路由幅值衰減電路、差分轉換電路及A/D轉換電路3部分構成。采用高輸入阻抗運算放大器構成的幅值衰減電路,在傳感器的激勵加載端對信號進行采集并衰減至基準電壓范圍內。差分放大器將單端信號轉換為差分信號,以便匹配A/D轉換器的差分輸入接口。反饋環節無需使用電容等制造誤差較大的模擬器件,使反饋數據真實可靠。本設計選用ADI公司16位A/D轉換器AD9262,具有雙通道、160 Msample/s采樣速率等性能特點,并采用高精度電壓源ADR440作為轉換的電壓基準,該芯片采用了溫度漂移曲率校正技術和XFET(外加離子注入場效應管)技術,輸出電壓穩定,從而減小反饋信號數字化過程中引入的誤差,保證輸出激勵信號的幅值精確度。

圖5 信號反饋電路
3 激勵信號源軟件設計
控制軟件主要分為3個功能模塊進行設計,分別是采樣控制模塊、數據處理模塊和DDS模塊。利用VHDL語言分別對各個模塊進行描述,生成原理圖符號,然后在頂層原理圖文件中進行信號連接,設計好的軟件處理功能模塊如圖6所示。

圖6 軟件處理功能模塊
采樣控制模塊控制A/D轉換器對輸出信號進行采集。數據處理模塊是軟件的核心部分,主要完成幅值及相位檢測和控制工作。幅值檢測器獲取一個周期的采樣點,將各點數據按照幅值大小進行排序,然后在前后兩端各取m個點,即截取波峰和波谷數據,分別對兩組數據平均后得峰值Umax及谷值Umin,信號幅值記為Ua=Umax-Umin,此幅值Ua與實際的信號峰峰值Uia不相等,但將在后續的增益轉換中進行補償。相位檢測器將幅值為U0=(Umax+Umin)/2的P0點作為時間測量點,以P0的前一個采樣點Pi和后一個采樣點Pi+1對應的時刻作為基準,用線性插值算法計算出過零點P0對應的時刻,兩路信號在P0點處的時刻相減即得相位差,所采用的幅值相位檢測方法示意圖如圖7所示。該檢測方法采用數字平均和幅值等分有效抑制了信號中的高頻和低頻干擾,通過線性插值實現了時間細分,精確高效地完成了幅值相位檢測。
幅值控制器與相位控制器均用PI控制算法對輸出信號進行控制。幅值預設值為Ud,計算幅值誤差e(k)= Ua-Ud,根據PI算法修正后的幅值u(k)可表示為:

圖7 幅值相位檢測方法示意圖

然后將u(k)轉換為增益Aa。采用同樣的運算得到另一路幅值增益Ab,對于相位的控制則無需轉換為增益,直接得到修正后的相位控制字Fo。
以上通過PI算法修正后的數據,不能直接加載于常規DDS電路上,所以在DDS模塊中增加了增益控制器和相位調制器。增益控制器通過乘法器將查表值乘以增益Aa、Ab后輸出至DA數據端口。相位調制器直接用修正后的相位控制字進行相位調制,改變輸出信號的相位。最后實現對輸出信號幅值及相位的調整控制。
4 實驗驗證
根據納米時柵對激勵信號的要求,設計了頻率為20 kHz的高精度信號源,為了驗證設計的激勵信號源的性能,我們做了如下實驗。
4.1 信號源波形實驗
將設計的信號源與傳感器相連,利用示波器探頭檢測加載到傳感器上的激勵信號,觀察到的信號波形如圖8所示。兩路信號Uia、Uib均具有良好的正弦性,滿足設計要求。

圖8 輸出信號波形
4.2 信號源精度實驗
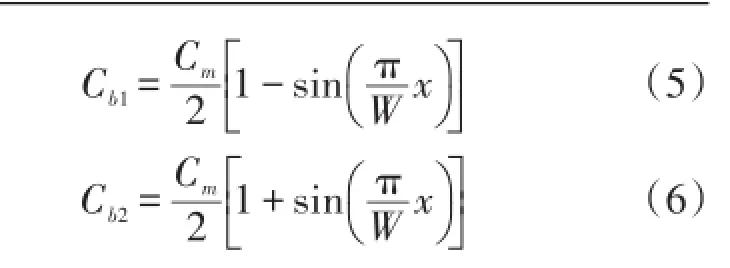
為驗證設計信號源的精度,使用NI公司Lab-VIEW信號采集系統對圖8中的Uia和Uib信號進行幅值及相位檢測。采用滑動濾波、數據擬合等方法去除信號噪聲,然后讀取測量值,表2是10次測量測得的數據。分析表2中的數據可知,幅值的絕對誤差峰峰值小于2 mV,相對誤差小于0.01%,相位的絕對誤差峰峰值小于0.09°,相對誤差小于0.1%。結果表明利用閉環結構實現了對信號幅值和相位的精確控制,獲得了高精度的輸出信號。
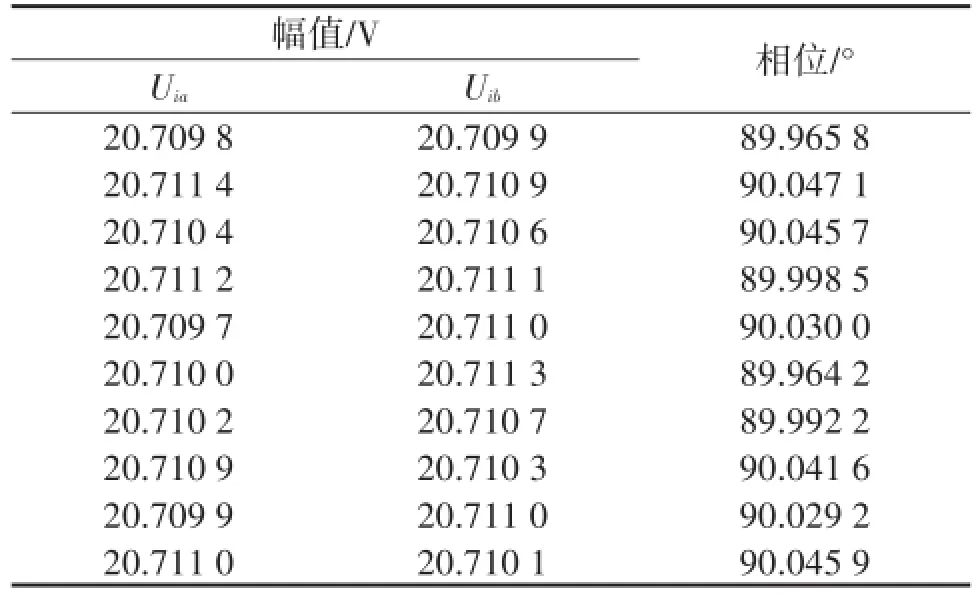
表2 測量數據
4.3 精度對比實驗
以RENISHAW公司ML10激光干涉儀(線性測量范圍為40 m,線性測量精度為±0.7×10-6m)輸出值作為位移參考值,納米時柵信號處理系統[13]輸出值作為測量值,進行誤差標定實驗。首先利用基于虛擬儀器平臺的LabVIEW激勵源產生兩路激勵信號,測量一個對極內的原始誤差;然后將LabVIEW激勵源移除,改用本文設計的信號源進行激勵,測量同一對極內的原始誤差。測得的兩組誤差曲線對比如圖9所示,使用設計激勵源后,誤差峰峰值從原有的1.4 μm減小為0.9 μm。由此說明,設計激勵源的精度性能優于LabVIEW激勵源。
圖9 誤差曲線
5 結論
針對納米時柵對激勵信號的要求,設計了高精度激勵信號源。該信號源采用了閉環控制技術,消除了溫度變化、元器件參數不一致等因素對信號精度影響,實現了幅值和相位的精確控制,還具有體積小,分辨率高,易于實現數字化補償等優點。實驗表明所設計的信號源不僅滿足納米時柵對激勵信號的要求,而且減小了測量誤差,為納米時柵的進一步研究提供了有力保證。
[1] 國家自然科學基金委工程與材料科學學部.機械工程學科發展戰略報告(2011-202)[R].北京:科學出版社,2010:288-315.
[2] Andrew J Fleming.A Review of Nanometer Resolution Position Sensors:Operation and Performance[J].Sensors and Actuators A:Physical,2013,190:106-126.
[3] David Pile.Nanometrology:Diffraction Rules.Nature Photonics,2010,4:813.
[4] Gerd Jaeger.Limitations of Precision Length Measurements Based on Interferometers[J].Measurement,2010,43:652-658.
[5] 鄒自強.論納米光柵測量技術[J].納米技術與精密工程,2004,2(1):8-15.
[6] Eurenius L,H?gglund C,Olsson E,et al.Grating Formation by Metal Nano-Particle Mediated Coupling of Light into Wave-Guided Modes[J].Nature Photonics,2008,2:360-364.
[7] 陳本勇,李達成.納米測量技術的挑戰與機遇[J].儀器儀表學報,2005,26(5):547-550.
[8] 劉小康,蒲紅吉,鄭方燕,等.納米時柵位移傳感器電場分布與誤差特性研究[J].儀器儀表學報,2013,34(10):2257-2264.
[9] 劉小康,彭凱,王先全,等.納米時柵位移傳感器的理論模型與誤差分析[J].儀器儀表學報,2014,35(5):1136-1142.
[10]凌旭,王先全,馮濟琴,等.基于虛擬儀器技術的納米時柵傳感器實驗研究[J].傳感器與微系統,2013,32(12):61-63.
[11]唐文彥.傳感器[M].第5版.北京:機械工業出版社,2014:65-67.
[12]葉敏,周文暉,顧偉康.基于FPGA的實時圖像濾波及邊緣檢測方法[J].傳感技術學報,2007,20(3):623-627.
[13]于治成,鄭方燕,馮濟琴,等.納米時柵傳感器數字信號處理系統設計[J].傳感技術學報,2013,26(11):1548-1551.

黃 沛(1988-),男,漢族,重慶人,碩士研究生,主要研究方向為現代傳感技術,cquttg@126.com;

鄭方燕(1972-)女,漢族,四川宣漢人,碩士,副教授,主要從事計算機輔助測試與儀器智能化的研究;發表論文20余篇,獲專利5項,zfy@cqut.edu.cn。
Research and Design of High Precision Signal Source for Nanometer Time Grating Sensor*
HUANG Pei,ZHENG Fangyan*,FENG Jiqin,CHEN Ziran
(Engineering Research Center of Mechanical Testing Technology and Equipment,Ministry of Education,Chongqing Key Laboratory of Time-grating Sensing and Advanced Testing Technology,Chongqing University of Technology,Chongqing 400054,China)
Nanometer time grating makes measurement with moving reference frame constructed by alternating electric field.Precision of the excitation directly affects the uniform motion of the reference frame,and thus influences the accuracy of measurement.In order to meet the requirement of high precision excitation,a new signal source adopting closed loop control was designed.FPGA was used to complete overall control,including acquisition control,data processing and waveform data generating.Signal generating circuit and feedback circuit were constructed with 16-bit D/A and A/D converters,therefore the precise control of signals was improved a lot.The test results show that the precision of the signal amplitude is 0.01%and the phase precision is 0.1%,and the original precision of nanometer time grating was improved from 1.4 μm to 0.9 μm.
nanometer measurement;time grating;closed loop control;FPGA;signal source;EEACC:7230
TP212
A
1004-1699(2015)07-0977-05
10.3969/j.issn.1004-1699.2015.07.006
項目來源:重慶市科委前沿與應用基礎研究項目(cstc2014jcyjA70002,cstc2013jcyjA70007)
2015-03-09 修改日期:2015-04-28
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06