基于背靠背雙PWM變流器的飛輪儲能系統并網控制方法研究
2015-11-16 09:03:50劉文軍唐西勝齊智平
電工技術學報 2015年16期
關鍵詞:系統
劉文軍 唐西勝 周 龍 齊智平
(中國科學院電工研究所 北京 100190)
0 引言
飛輪儲能由于具有無環境污染、使用壽命長、充放電次數無限制等特點,且與傳統化學電池相比優勢明顯,已得到了國內外研究學者的廣泛關注[1-5]。采用飛輪儲能系統并網運行,可以主動調節電網有功功率,確保系統供需平衡,減少有功負荷變化、間歇性可再生能源接入電網等對系統穩定性、可靠性的影響,在電力系統調頻、間歇式可再生能源發電等領域具有廣闊的應用前景[6-11]。飛輪儲能并網控制方法作為飛輪儲能系統的關鍵技術之一,是飛輪儲能系統成功參與電網功率調節的關鍵,具有重要意義。
背靠背雙PWM變流器目前在具有再生能量反饋的交直交變頻調速系統中得到了廣泛的應用[12,13]。文獻[13]采用背靠背變流器將電機制動時產生的能量回饋給電網,其直流母線電壓由電網側變流器控制,電機側變流器采用速度外環、電流內環,但由于該控制方法以電機轉速為控制目標,其從電網吸收和回饋給電網的功率不可控。近來,背靠背雙PWM 變流器在飛輪儲能系統的并網運行中被廣泛采用,其控制方法得到了國內外學者的廣泛研究[14-19]。文獻[14]采用經背靠背變流器并網的飛輪儲能系統協助風電場進行有功和頻率控制,其直流母線電壓由電網側變流器控制,但并網功率由電機側變流器間接控制,響應速度慢,且電機轉矩參考指令值由并網功率與轉子機械角速度之比求得,實際并網功率值易受轉速測量誤差的影響。文獻[15]對用于飛輪儲能系統的背靠背變流器進行了仿真研究,但當系統在放電與充電之間切換時,其直流母線電壓的控制需由電機側變流器控制切換到由電網側變流器控制,控制較為復雜。文獻[16-19]采用基于背靠背變流器的飛輪儲能系統來平抑風力發電輸出功率的波動并進行了仿真研究,其直流母線電壓由電網側變流器控制,并網功率由電機側與電網側變流器共同控制,控制較為復雜。此外,上述文獻中背靠背變流器均經過L濾波器或LC濾波器與電網相連,與這兩種濾波器相比,LCL濾波器可以在較小電感的情況下獲得較理想的諧波抑制效果,已在風能、太陽能等可再生能源并網發電中被廣泛采用[20-24]。
為抑制飛輪儲能系統注入電網電流的諧波,本文在背靠背變流器與電網之間串入LCL濾波器。為避免直流母線電壓在由電網側變流器控制與由電機側變流器控制之間來回切換,以及為解決并網功率易受轉速測量誤差影響的問題,本文提出了一種飛輪儲能系統并網控制方法。該控制方法由電網側變流器控制和電機側變流器控制兩部分組成,并先后經過充電、預并網和并網運行三個階段。在充電、預并網階段,電網側變流器均采用不控整流方式;電機側變流器在充電階段采用速度外環控制方式,在預并網階段采用電壓外環控制方式。在并網運行階段,電網側變流器控制采用基于電網側電流外環、變流器側電流內環的直接功率控制策略,控制并網有功功率;電機側變流器控制采用直流母線電壓外環、電流內環的雙閉環控制策略,控制直流母線電壓。首先建立了永磁同步電機的數學模型,接著給出了飛輪儲能系統并網控制方法的工作原理,然后給出了電機側內外環控制器參數的設計方法,進行了穩定性分析,并給出了設計實例。最后進行了飛輪儲能系統充電、預并網和并網運行實驗。
1 主電路拓撲與PMSM數學模型
圖1給出了基于背靠背雙PWM變流器的并網飛輪儲能系統的主電路拓撲。由圖1可見,并網飛輪儲能系統由LCL濾波器、背靠背雙PWM變流器、永磁同步電機(PMSM)和飛輪等組成。LCL濾波器由電網側電感Lg、變流器側電感Lconv、濾波電容C組成;背靠背雙 PWM變流器由電網側變流器、電機側變流器、直流母線電容Cdc等組成。
飛輪儲能系統中永磁同步電機采用直軸電樞電流imd=0的控制策略時,交軸電壓、電流關系可表示為

式中,umq為定子電壓交軸分量;Rs為定子電阻;imq為交軸電樞電流;Lq為交軸電感;ωe為電機電氣角速度;ψf為轉子勵磁磁鏈。
電機轉矩平衡方程可寫為

式中,Kt=3p2ψf/2;J為轉動慣量;B為粘滯摩擦系數;p為極對數;Te為電磁轉矩。
2 飛輪儲能系統并網控制方法
2.1 充電
在充電階段,電網側變流器采用不控整流方式;電機側變流器采用速度外環、電流內環的控制方式將飛輪電機充電至設定的轉速。飛輪儲能系統充電階段的控制方法如圖1中開關S位于a時所示。
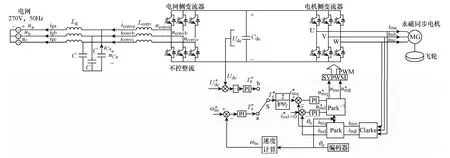
圖1 飛輪儲能系統充電與預并網階段控制方法Fig.1 Control method of FESS at charge and pre-grid-connected stages
2.2 預并網
當飛輪電機充電至設定的轉速后,電網側變流器控制方式不變,仍采用不控整流的方式;但電機側變流器由速度外環切換到電壓外環的控制方式,此時飛輪儲能系統進入預并網階段。
由于電網不控整流得到的直流母線電壓等級低于并網所需的直流母線電壓等級,因此電機側變流器電壓外環控制中的直流母線電壓指令值需大于電網不控整流所得的直流母線電壓值。這樣,由于電網線電壓峰值低于飛輪電機所穩定的電壓值,電網線電壓被不控整流橋上的二極管反向阻斷,可以將電網變流器等效為開路,這樣預并網階段的飛輪電機可以看作是以電壓外環空載放電。飛輪儲能系統預并網階段的控制方法如圖1中開關S位于b時所示。
2.3 并網運行
在進入預并網階段后,只要啟用電網側變流器的PWM控制,而電機側變流器以電壓外環的控制方式不變,飛輪儲能系統即進入并網運行階段。
飛輪儲能系統并網運行控制方法如圖2所示。由圖2可見,電網側變流器采用基于電網側電流外環、變流器側電流內環的直接功率控制策略,控制直流母線與電網之間的功率交換。電機側變流器采用直流母線電壓外環、電流內環的雙閉環控制策略,維持直流母線電壓恒定,并間接控制直流母線與飛輪電機之間的功率交換以滿足電網側變流器對直流母線的功率需求。

圖2 飛輪儲能系統并網運行階段控制方法Fig.2 Control method of FESS at grid-connected stage
當并網有功功率指令值P*為正時,飛輪儲能系統并網放電;當P*為負且絕對值大于系統損耗時,飛輪儲能系統并網充電。當不需要飛輪儲能系統與電網進行無功功率交換時,可令并網無功功率指令值Q*=0。
當P*為負時,電網向飛輪儲能系統輸入的有功功率大小為|P*|,而系統的總損耗Ploss(|P*|,ωm)與|P*|及飛輪電機轉速ωm有關(具體證明過程因篇幅限制從略)。這樣當|P*|=Ploss(|P*|,ωm)時,電網向飛輪儲能系統輸入的有功功率與飛輪儲能系統總損耗相等,飛輪電機轉速將穩定在ωm。因此,當P*為|P*|=Ploss(|P*|,ωm)的解P*(ωm)時,飛輪儲能系統并網待機運行,所對應的待機轉速為ωm。
匯總后的飛輪儲能系統各個階段的控制方法見表 1。
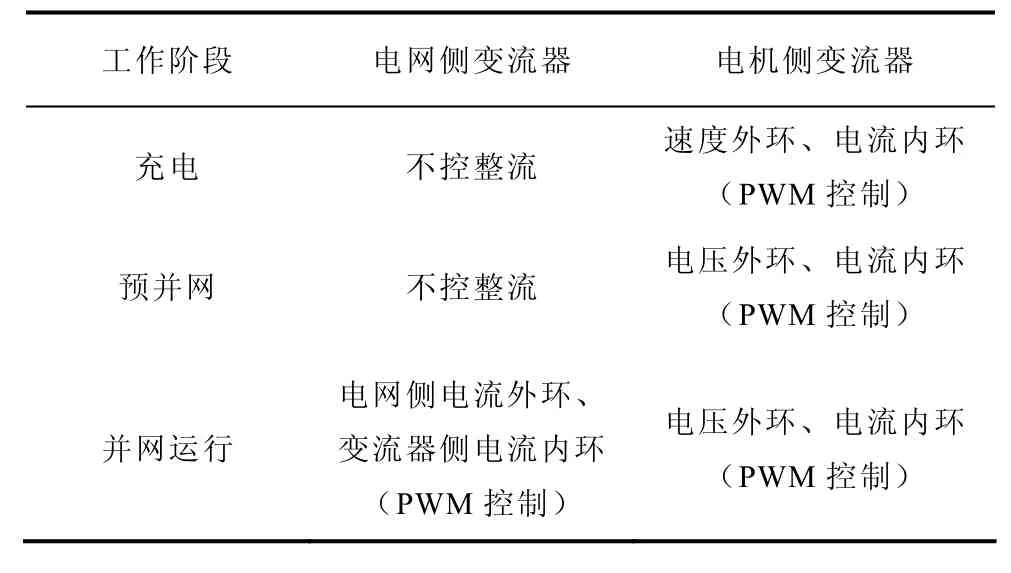
表1 飛輪儲能系統各階段控制方法Tab.1 Control method of FESS at three stages
3 電機側控制器參數設計與穩定性分析
電網側的控制器參數設計可參考文獻[20,25]先進行變流器側電流內環設計,再進行電網側電流外環設計,具體設計過程限于篇幅從略。
飛輪儲能系統并網運行時,電機側的控制器包括電流內環控制器、直流母線電壓外環控制器。
3.1 電流內環控制器參數設計及穩定性分析
根據式(1)、式(2)可推出電機側交軸電流控制器的結構如圖3所示。
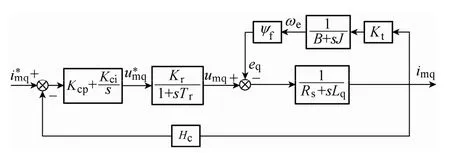
圖3 電機側交軸電流環結構圖Fig.3 Block diagram of motor-side current loop in q-axis
根據圖3可推出交軸電流環精確閉環傳遞函數為
式中
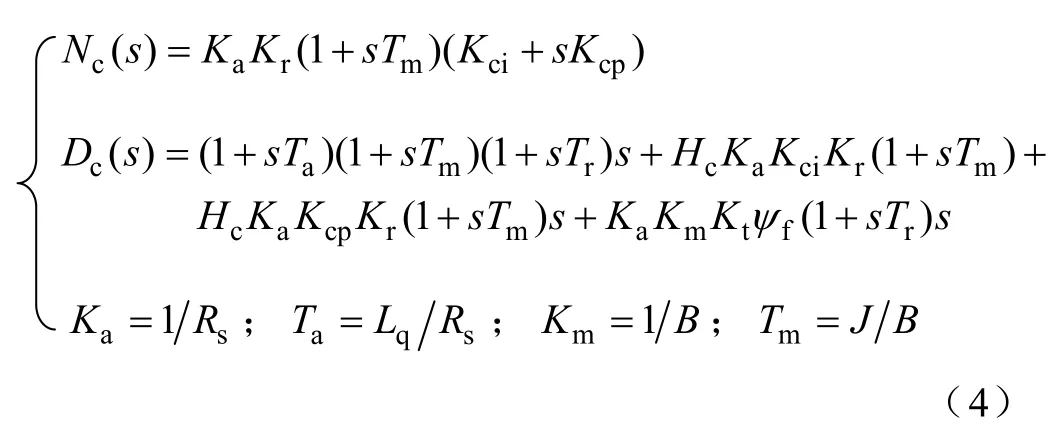
在帶寬頻率處,下列近似條件成立:(1+sTr)≈1;(1+sTm)≈sTm;(1+sTa)(1+sTr)≈1+sTar。 其中,Tar=Ta+Tr。
根據上述近似條件,式(3)可化簡為
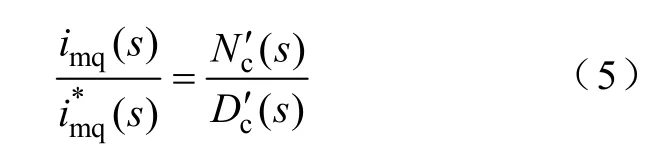
式中
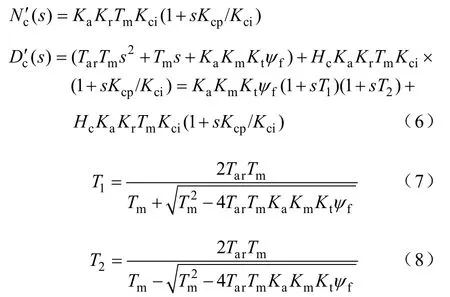
令

從而式(5)經過零極點對消可進一步化簡為
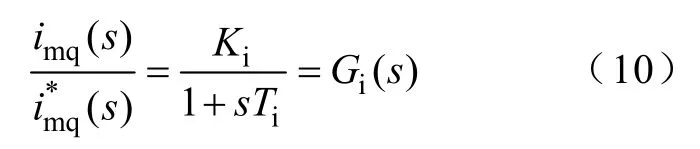
式中
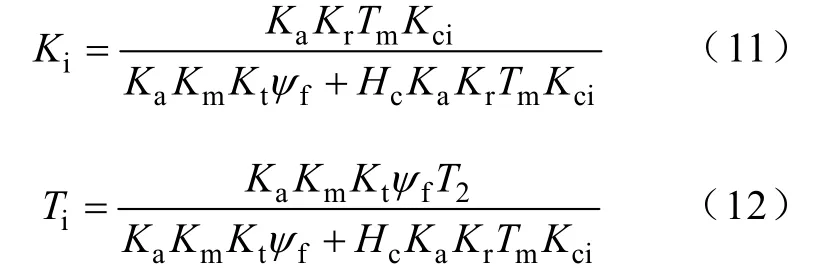
根據式(12)可得

可見經過化簡,交軸電流環可從式(3)表示的四階系統降為式(10)所示的一階系統。由于一階系統的調節時間

故可根據系統所要求的電流環調節時間ts按式(14)確定Ti,再根據Ti按式(13)確定Kci,然后根據式(9)將Kci乘以T1即可確定Kcp。
由一階簡化電流閉環傳遞函數(見式(10))可得,電流內環控制系統特征方程為1+sTi=0,其根為負數,因此可知電流內環控制系統穩定。
3.2 電壓外環控制器參數設計及穩定性分析
電壓外環控制器參數可先按預并網階段設計,然后在實驗中進行微調。在預并網階段,電壓環結構圖如圖4所示,其中KTe=3pψf/2,由此可推出電壓開環傳遞函數為

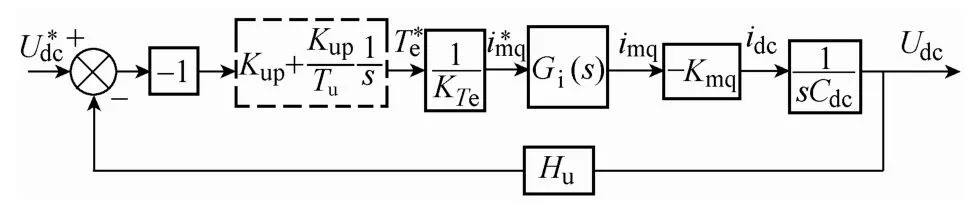
圖4 電機側電壓環結構圖Fig.4 Block diagram of motor side voltage loop
電壓閉環傳遞函數為

式中

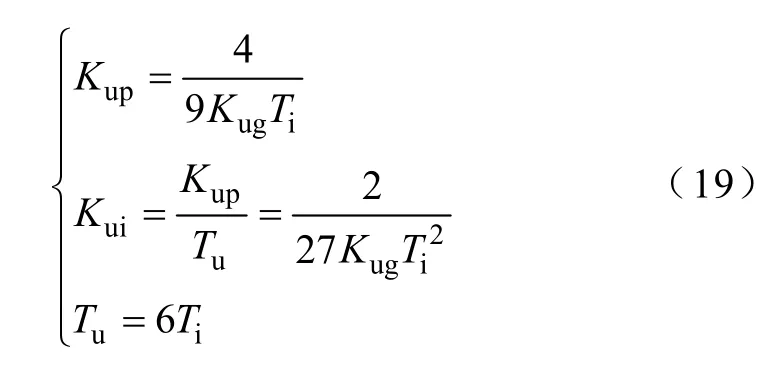
將電壓閉環傳遞函數(見式(16))等效為如式(18)所示的阻尼比為0.707的對稱優化函數,即

比較式(16)及式(18)可得
由式(18)可得電機側變流器控制系統的特征方程為

3.3 設計實例
永磁同步電機及飛輪參數見表2。將表2中的數據代入式(4),并結合Kr、Tr、Kmq、Cdc、Hc和Hu等已知參數可列得電機側變流器控制系統參數見表3。

表2 永磁同步電機及飛輪參數Tab.2 Parameters of PMSM and flywheel
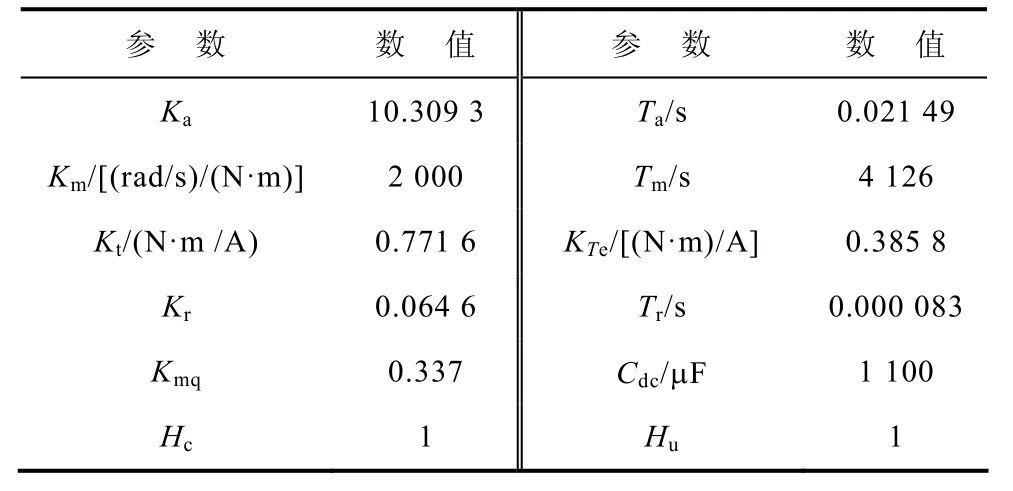
表3 電機側變流器控制系統參數Tab.3 Parameters of motor-side converter control system
假定電流內環要求的調節時間ts=2ms,根據式(14)可得Ti=0.000 667s。將表3中的數據分別代入式(7)、式(8)可得T1=0.021 8,T2=1.994 9。將Ti、T2及表3中的數據代入式(13)可得Kci=2 226。將Kci、T1代入式(9)可得Kcp=48.5。
將Kcp=48.5、Kci=2 226及表3中的數據分別代入式(3)、式(10),可以分別畫出四階準確電流閉環伯德圖、一階簡化電流閉環伯德圖,如圖5所示。
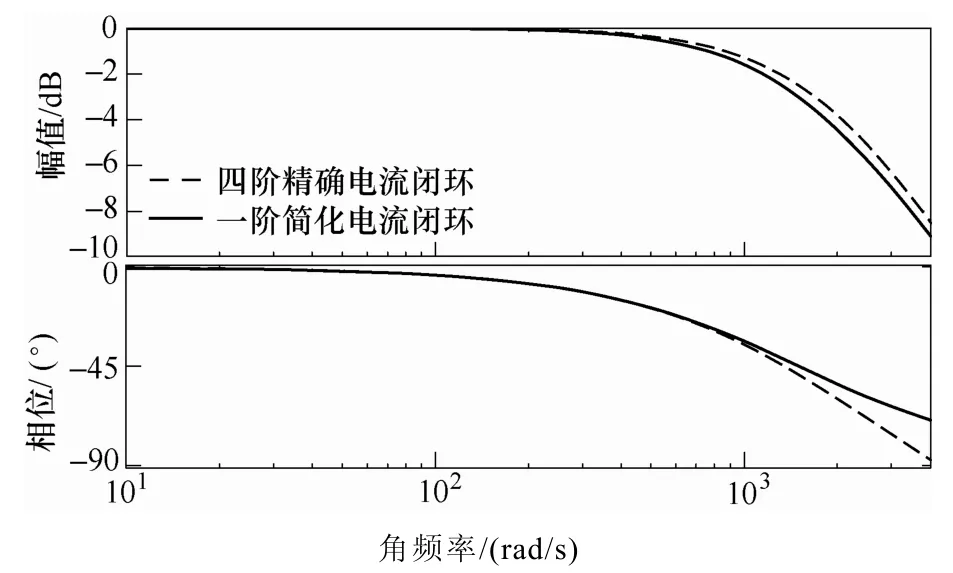
圖5 準確與簡化電機側電流環伯德圖Fig.5 Bode diagram of motor-side exact and simplified current loop
從圖5可見,一階簡化模型在幅頻特性與相頻特性上與四階準確模型很接近,采用一階簡化模型(見式(10))可以較好地替代四階準確模型(見式(3))。
確定電流內環控制器的參數后,再進行直流母線電壓外環控制器的參數設計。由式(11)可得Ki=0.999 7,將Ki代入式(17)可得Kug=793.86。然后將Kug、Ti代入式(19)可得Kup=0.8、Kui=210。圖6所示為電壓外環開環傳遞函數伯德圖。
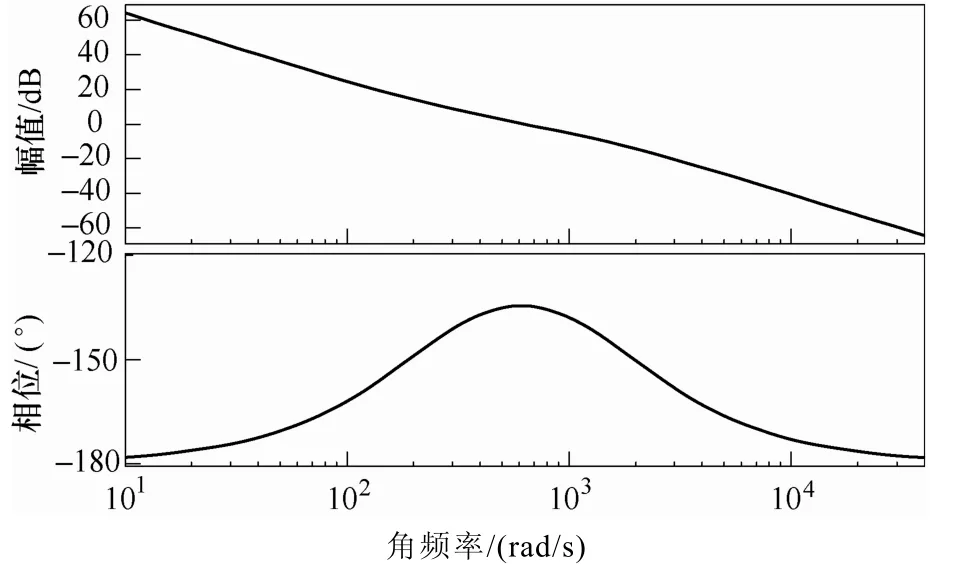
圖6 電機側電壓開環伯德圖Fig.6 Bode diagram of motor-side voltage open-loop
從圖6可見,幅頻曲線高頻段衰減較快,系統具有較強的抗高頻噪聲干擾的能力。此外,相頻曲線始終在?180°線以上,保證了系統的穩定性。
4 實驗結果與分析
為驗證所提飛輪儲能系統并網控制方法的正確性,搭建了飛輪儲能系統并網運行實驗平臺,完成了充電、預并網和并網運行實驗研究。
實驗所用的并網飛輪儲能系統如圖7所示。圖7a所示為飛輪儲能控制器,圖 7b所示為飛輪能量存儲模塊(包括永磁同步電機及飛輪轉子)。
圖7 并網飛輪儲能系統Fig.7 Grid-connected FESS
系統參數見表4,控制器參數見表5。永磁同步電機及飛輪參數見表2。
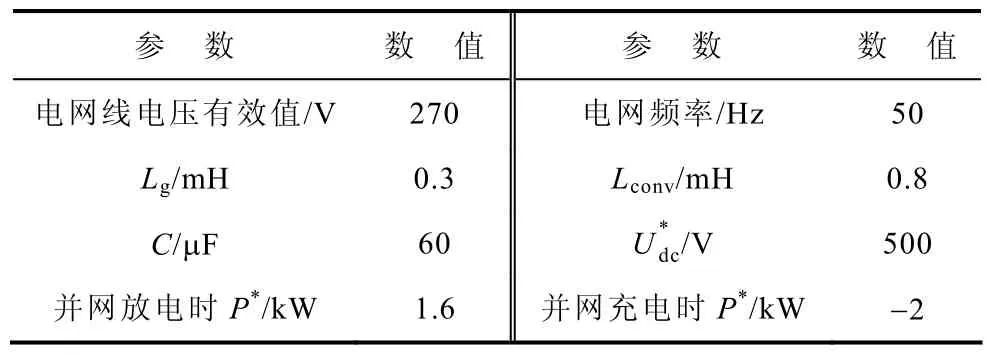
表4 系統參數Tab.4 System parameters

表5 控制器參數Tab.5 Controller parameters
4.1 充電與預并網
充電與預并網階段的電網電壓ua、并網電流iga、直流母線電壓Udc和飛輪電機轉速n的波形如圖8所示。
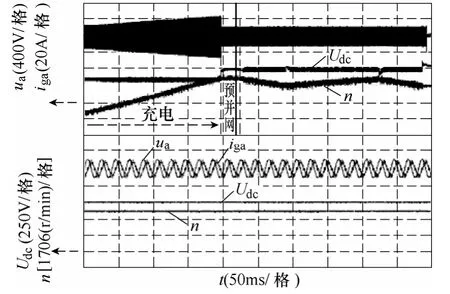
圖8 充電與預并網實驗波形Fig.8 Experimental waveforms at charge and pre-grid-connected stage
由圖8可見,在充電階段,飛輪電機以速度外環加速充電至預先設定的轉速 4 200r/min;在由充電進入預并網瞬間,直流母線電壓值由充電階段的381V(電網不控整流所得)躍變為飛輪電機以電壓外環所穩定的500V。此外還可以看出,在預并網階段,雖然電網側變流器相當于開路,但由于LCL濾波器中濾波電容C的存在,并網電流iga電流并不為零。
4.2 并網運行
在預并網階段將并網功率指令值設為P*=1.6kW,此時使能電網側變流器 PWM控制,系統即由預并網進入并網放電階段。系統由預并網進入并網放電瞬間,電網電壓ua、并網電流iga、直流母線電壓Udc和飛輪電機轉速n的波形如圖9所示。
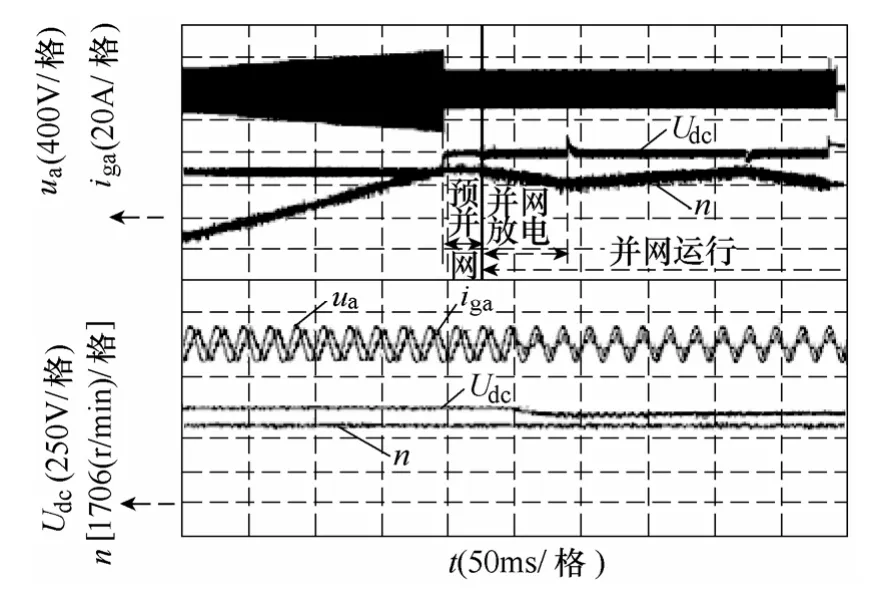
圖9 預并網到并網放電過渡Fig.9 Transition from pre-grid-connected to grid-connected discharge mode
從圖 9可以看出,打開電網側變流器 PWM脈沖后,并網電流iga很快就變得與電網電壓ua同相位,系統立即由預并網模式轉入并網放電模式,響應速度快。過渡過程中直流母線電壓雖然會出現短暫下降,但能在較短時間內回升并維持在500V。
系統進入并網放電后的實驗波形如圖10所示。從圖 10可以看出,在并網放電時,電網電壓ua與并網電流iga相位相差0°,飛輪儲能系統向電網提供恒定的有功功率;直流母線電壓始終保持在500V,飛輪轉速由4 200r/min下降至3 400r/min。
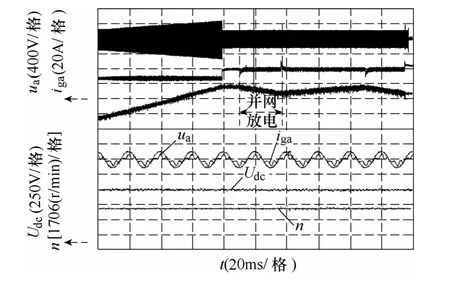
圖10 并網放電實驗波形Fig.10 Experimental waveforms in grid-connected discharge mode
飛輪轉速下降至3 400r/min時,將P*=1.6kW變為P*=?2kW,系統即由并網放電轉為并網充電,并網充電實驗波形如圖11所示。
從圖11可以看出,在并網充電時,電網電壓ua與并網電流iga相位相差 180°,飛輪儲能系統從電網吸收恒定的有功功率;直流母線電壓保持在500V,飛輪轉速由 3 400r/min又上升至 4 200r/min,完成了一個并網充放電循環周期。
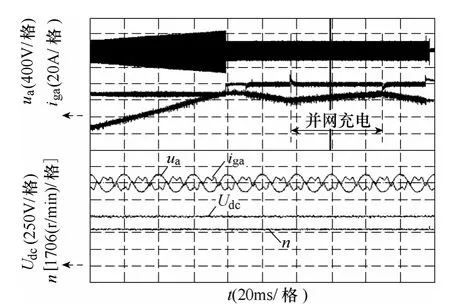
圖11 并網充電實驗波形Fig.11 Experimental waveforms in grid-connected charge mode
并網放電到并網充電切換瞬間的實驗波形如圖12所示。從圖12可以看出,系統能在半個工頻周波(即 10ms)內由并網放電切換到并網充電,響應速度快;過渡過程中直流母線電壓雖然會出現短暫上升,但能在較短時間內回落并保持在500V。
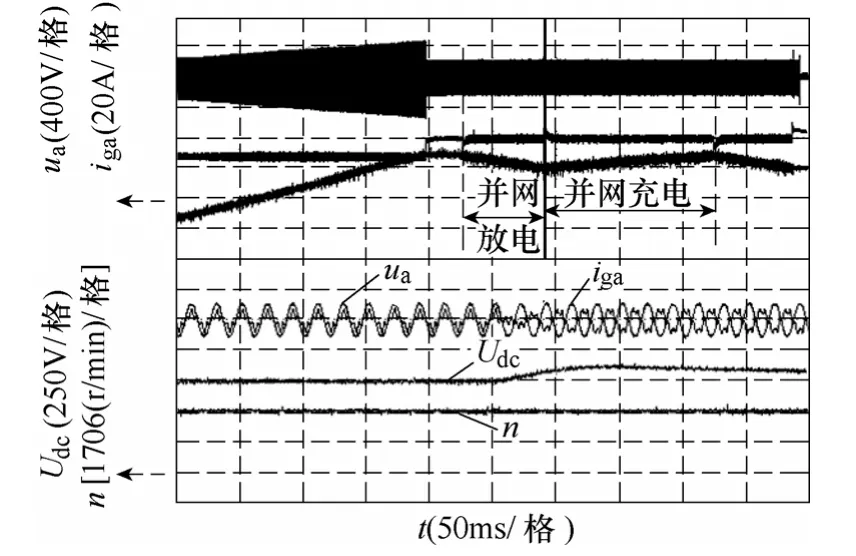
圖12 并網放電到并網充電過渡Fig.12 Transition from grid-connected discharge to charge mode
在飛輪轉速經并網充電上升至4 200r/min時,將P*=?2kW 又變回P*=1.6kW,系統即由并網充電又轉為并網放電。并網充電到并網放電切換瞬間的實驗波形如圖13所示。
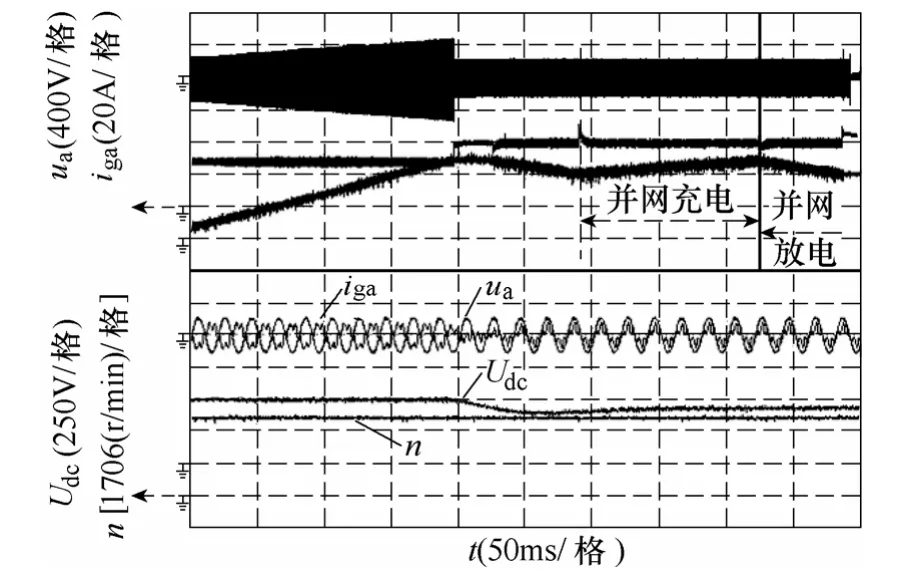
圖13 并網充電到并網放電過渡Fig.13 Transition from grid-connected charge to discharge mode
從圖13可以看出,系統能在半個工頻周波(即10ms)內由并網充電切換到并網放電,響應速度快;過渡過程中直流母線電壓雖然會出現短暫下降,但能在較短時間內回升并維持在500V。
此外,通過對實驗結果分析還可以發現,飛輪儲能系統并網功率控制的穩態準確度和動態性能與電網側的控制器參數相關;直流母線電壓控制的穩態準確度及動態性能與電機側的控制器參數相關。為了達到較好的控制效果,控制器參數可以先按本文第 3節所述的控制器參數設計方法進行初步設計,然后在實驗中做進一步的微調。
5 結論
為實現飛輪儲能系統的并網運行,本文提出了一種飛輪儲能系統并網控制方法。該方法由電網側變流器控制和電機側變流器控制組成。整個控制過程先后經過充電、預并網和并網運行三個階段。在充電和預并網階段,電網側變流器均采用不控整流的方式;電機側變流器分別采用速度外環和電壓外環的控制方式。在并網運行階段,電網側變流器控制采用基于電網側電流外環、變流器側電流內環的直接功率控制策略,控制并網有功功率;電機側變流器控制采用直流母線電壓外環、電流內環的雙閉環控制策略,控制直流母線電壓。給出了電機側內外環控制器參數的設計方法和設計實例。進行了飛輪儲能系統充電、預并網和并網運行實驗。實驗結果驗證了所提飛輪儲能系統并網控制方法的可行性。
[1] Kenny B H,Kascak P E,Jansen R,et al.Control of a high-speed flywheel system for energy storage in space applications[J].IEEE Transactions on Industry Applications,2005,41(4):1029-1038.
[2] 程時杰,余文輝,文勁宇,等.儲能技術及其在電力系統穩定控制中的應用[J].電網技術,2007,31(20):97-108.
Cheng Shijie,Yu Wenhui,Wen Jinyu,et al.Energy storage and its application in power system stability enhancement[J].Power System Technology,2007,31(20):97-108.
[3] 戴興建,鄧占峰,劉剛,等.大容量先進飛輪儲能電源技術發展狀況[J].電工技術學報,2011,26(7):133-140.
Dai Xingjian,Deng Zhanfeng,Liu Gang,et al.Review on advanced flywheel energy storage system with large scale[J].Transactions of China Electrotechnical Society,2011,26(7):133-140.
[4] 鄧自剛,王家素,王素玉,等.高溫超導飛輪儲能技術發展現狀[J].電工技術學報,2008,23(12):1-10.
Deng Zigang,Wang Jiasu,Wang Suyu,et al.Status of high Tc superconducting flywheel energy storage system[J].Transactions of China Electrotechnical Society,2008,23(12):1-10.
[5] 張維煜,朱熀秋.飛輪儲能關鍵技術及其發展現狀[J].電工技術學報,2011,26(7):141-146.
Zhang Weiyu,Zhu Huangqiu.Key technologies and development status of flywheel energy storage system[J].Transactions of China Electrotechnical Society,2011,26(7):141-146.
[6] 孫春順,王耀南,李欣然.飛輪輔助的風力發電系統功率和頻率綜合控制[J].中國電機工程學報,2008,28(29):111-116.
Sun Chunshun,Wang Yaonan,Li Xinran.Synthesized power and frequency control of wind power generation system assisted through flywheels[J].Proceedings of the CSEE,2008,28(29):111-116.
[7] 姬聯濤,張建成.基于飛輪儲能技術的可再生能源發電系統廣義動量補償控制研究[J].中國電機工程學報,2010,30(24):101-106.
Ji Liantao,Zhang Jiancheng.Research on generalized momentum compensation method of flywheel energy storage in renewable energy power system[J].Proceedings of the CSEE,2010,30(24):101-106.
[8] Wang L,Yu J Y,Chen Y T.Dynamic stability improvement of an integrated offshore wind and marine-current farm using a flywheel energy-storage system[J].IET Renewable Power Generation,2011,5(5):387-396.
[9] Lazarewicz M L,Rojas A.Grid frequency regulation by recycling electrical energy in flywheels[C].Proceedings of the IEEE Power Engineering Society General Meeting,2004.
[10] Cimuca G,Breban S,Radulescu M M,et al.Design and control strategies of an induction-machine-based flywheel energy storage system associated to a variablespeed wind generator[J].IEEE Transactions on Energy Conversion,2010,25(2):526-534.
[11] Cimuca G O,Saudemont C,Robyns B,et al.Control and performance evaluation of a flywheel energystorage system associated to a variable-speed wind generator[J].IEEE Transactions on Industrial Electronics,2006,53(4):1074-1085.
[12] 戴鵬,朱方田,朱榮伍,等.電容電流直接控制的雙 PWM 協調控制策略[J].電工技術學報,2011,26(S1):136-141.
Dai Peng,Zhu Fangtian,Zhu Rongwu,et al.Direct control of capacitor current for AC-DC-AC PWM converter[J].Transactions of China Electrotechnical Society,2011,26(S1):136-141.
[13] 李時杰,李耀華,陳睿.背靠背變流系統中優化前饋控制策略的研究[J].中國電機工程學報,2006,26(22):74-79.
Li Shijie,Li Yaohua,Chen Rui.Study of the optimum feed-forward control strategy in back-to-back converter system[J].Proceedings of the CSEE,2006,26(22):74-79.
[14] 向榮,王曉茹,譚謹.基于飛輪儲能的并網風電場有功功率及頻率控制方法研究[J].系統科學與數學,2012,32(4):438-449.
Xiang Rong,Wang Xiaoru,Tan Jin.Operation control of flywheel energy storage system applying to wind farm[J].Journal of Systems Science and Mathematical Sciences,2012,32(4):438-449.
[15] Xu Song,Wang Haifeng.Simulation and analysis of back- to-back PWM converter for flywheel energy storage system[C].Proceedings of 2012 15th International Conference on the Electrical Machines and Systems(ICEMS),2012:1-5.
[16] Suvire G,Mercado P.Dstatcom with flywheel energy storage system for wind energy applications:control design and simulation[J].Electric Power Systems Research,2010,80(3):345-353.
[17] Suvire G O,Mercado P E.Active power control of a flywheel energy storage system for wind energy applications[J].IET Renewable Power Generation,2012,6(1):9-16.
[18] Suvire G O,Molina M G,Mercado P E.Improving the integration of wind power generation into AC microgrids using flywheel energy storage[J].IEEE Transactions on Smart Grid,2012,3(4):1945-1954.
[19] Suvire G O,Mercado P E.Combined control of a distribution static synchronous compensator/flywheel energy storage system for wind energy applications[J].IET Generation,Transmission & Distribution,2012,6(6):483-492.
[20] Yi T,Poh Chiang L,Peng W,et al.Exploring inherent damping characteristic of LCL-filters for three-phase grid-connected voltage source inverters[J].IEEE Transactions on Power Electronics,2012,27(3):1433-1443.
[21] Teodorescu R,Blaabjerg F,Liserre M,et al.Proportional-resonant controllers and filters for grid-connected voltage-source converters[J].IEE Proceedings of Electric Power Applications,2006,153(5):750-762.
[22] Bolsens B,DE Brabandere K,Van Den Keybus J,et al.Model-based generation of low distortion currents in grid-coupled PWM-inverters using an LCL output filter[J].IEEE Transactions on Power Electronics,2006,21(4):1032-1040.
[23] 徐志英,許愛國,謝少軍.采用 LCL濾波器的并網逆變器雙閉環入網電流控制技術[J].中國電機工程學報,2009,29(27):36-41.
Xu Zhiying,Xu Aiguo,Xie Shaojun.Dual-loop grid current control technique for grid-connected inverter using an LCL filter[J].Proceedings of the CSEE,2009,29(27):36-41.
[24] 白志紅,阮新波,徐林.基于 LCL濾波器的并網逆變器的控制策略[J].電工技術學報,2011,26(S1):118-124.
Bai Zhihong,Ruan Xinbo,Xu Lin,et al.Control strategies for the grid-connected inverter with LCL filter[J].Transactions of China Electrotechnical Society,2011,26(S1):118-124.
[25] 胡雪峰,韋徵,陳軼涵,等.LCL濾波并網逆變器的控制策略[J].中國電機工程學報,2012,32(27):142-148.
Hu Xuefeng,Wei Zheng,Chen Yihan,et al.A control strategy for grid-connected inverters with LCL filters[J].Proceedings of the CSEE,2012,32(27):142-148.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
