機載雙頻GPS載波相位定位算法與算例
2015-11-15 05:12:36趙麗莉
航空兵器 2015年2期
關鍵詞:模型
趙麗莉,袁 林
(91550 部隊,遼寧 大連 116023)
0 引 言
在精度校飛和測控裝備驗收試驗中,雙頻GPS接收機是目前唯一的真值測量設備,承擔著為其他設備提供基準數據的任務。提高雙頻GPS衛星測量定位精度,可以為精度校飛試驗、船載動態試驗及測控設備的驗收試驗提供更好保障[1]。
影響衛星定位精度的因素主要有衛星相關誤差、傳播相關誤差和接收機相關誤差等。其中,電離層延遲是衛星測量中最重要的誤差源之一。在機載GPS 載波相位差分定位中,通常利用在機場附近設立的一個基準站與機上移動站形成的短基線條件固定模糊度,使定位精度達到厘米級。但隨著飛機起飛后基線距離增大,高度差增大,導致電離層和對流層延遲殘差增大,模糊度固定和定位精度都將受到影響。同時衛星失鎖,新星升起也都需要重新固定模糊度,飛機動態條件下的周跳檢測方法也有別與傳統靜態周跳檢測方法。這些都成為阻礙機載GPS 定位精度達到分米級的關鍵因素。文中利用適用于雙頻GPS 觀測的電離層殘差法和M-W 組合來探測周跳[2],當出現周跳時把該周跳當作新星升起,重新搜索模糊度。對電離層延遲殘差,利用電離層浮點模型[3],將每對衛星對應的電離層延遲殘差參數化,與模糊度參數、位置參數同時求解。對雙差對流層延遲殘差也可以同樣參數化,但求解精度取決于衛星幾何分布[4],文中將直接使用經驗模型改正。對模糊度,利用Kalman 濾波求解雙頻GPS 雙差方程得到浮點解和協方差陣,利用LAMBDA 算法固定模糊度。新星升起時,將在保持其他衛星模糊度的基礎上,僅初始化該新星模糊度,以此加快模糊度搜索。
1 算法模型
1.1 雙頻GPS 雙差方程
兩臺接收機設為k 和l,衛星設為i 和j,雙頻GPS 觀測雙差方程為
式中:Φ1,Φ2為兩個頻段相位;P1,P2為偽距觀測值;λ1,λ2分別為L1,L2頻段波長;ρ 為衛星天線和接收機天線間的幾何距離;I/f2為一階電離層延遲殘差;T 為對流層延遲殘差;N1,N2為兩個頻段雙差模糊度;ε,e 為測量噪聲。式中忽略了天線相位中心偏差和多路徑效應。
1.2 擴展Kalman 濾波
文中用擴展Kalman 濾波求解GPS 雙差方程,方程(1)線性化為

式中:Yk為觀測量與計算量之差;Vk為觀測噪聲,且滿足E(Vk)=0,cov(Vk,Vj)=Rkδkj。對載波相位和偽距,R 為仰角相關權陣[5];H 為設計矩陣;δX 為待估參數向量,包括位置分量參數、電離層和對流層延遲殘差以及兩個頻段雙差模糊度。
系統狀態方程為

式中:Wk-1為系統噪聲,滿足E(Wk-1)=0,cov(Wk,Wj)=Qkδkj,狀態轉移矩陣為

由此,以偽距雙差解算的結果作為位置參數初值,根據擴展Kalman 濾波遞推公式,可以求解方程(1),得到模糊度浮點解和協方差陣,用LAMBDA 算法[6]即可固定整周模糊度。文中采用了比值檢驗確定整周模糊度。如果連續多個歷元的次小殘差平方和與最小殘差平方和的比值大于2,則整周模糊度被正確固定。若不發生周跳或殘差變大,可以保持模糊度。當周跳發生或新星升起時,僅給該衛星雙差模糊度松約束,保持其他衛星模糊度強約束,以保證在長基線時能快速固定新星模糊度[7]。
1.3 周跳檢測
GPS 動態測量中,周跳的探測與修復方法有很多,文中利用電離層殘差法和M -W 組合探測周跳[2]。消除了衛星星歷誤差、接收機及衛星鐘差和幾何項影響的電離層殘差。組合觀測方程:
為判斷歷元間是否發生周跳,對上述電離層殘差組合在歷元間求差:

不發生周跳時,ΔN1= ΔN2=0,ΔΦI為一小量,可用來檢測周跳。但其不能檢測的周跳。這時可以用M-W 組合檢測周跳,M -W組合觀測值為

寬巷模糊度為

其歷元間差為

同樣,無周跳時,ΔNw為一隨機小量,可用來探測周跳,并可以與電離層殘差法互補缺陷。文中并不修復周跳,而是把周跳當作新星處理,重新固定其模糊度。
1.4 大氣延遲殘差
飛機起飛一段距離后,機載GPS 處于中長基線下,電離層、對流層延遲殘差較大,嚴重影響模糊度固定。解決方法是:對電離層延遲殘差采用電離層浮點模型,將雙差電離層延遲殘差參數化,與位置參數和模糊度參數同時求解,以此消除電離層延遲殘差影響。對對流層延遲殘差,可以把模型改正后的殘差參數化,與位置參數同時求解,但其求解精度與衛星幾何分布[8]相關。文中采用對流層經驗改正模型[9-10]。
2 試驗數據分析
以某次飛行任務為例,裝備一臺雙頻接收機作為基準站接收機在機場附近,記作M 接收機,裝備兩臺雙頻接收機在飛機上作為動態測量接收機,記作R1 和R2。兩接收機間距離固定為24.40 m,飛機停在跑道上時基線長度約為240 m。動態接收機初始化12 min,采樣率為1 Hz,衛星截止高度角為28°。接收機提供四種觀測數據C1,L1,L2,P2。飛機航路如圖1 所示,R1 站高程如圖2 所示,各衛星仰角如圖3 所示。采用SAAS 模型[9]和Neill映射函數[10]對對流層延遲進行模型修正。取標準大氣條件,相對濕度0.5。
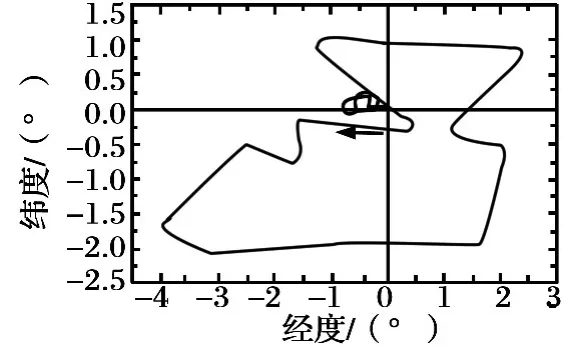
圖1 飛機航路圖
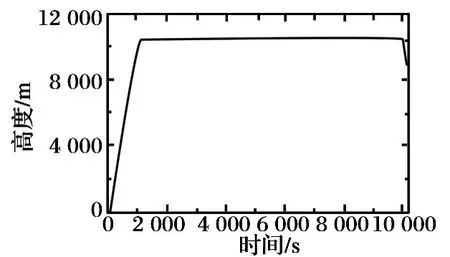
圖2 飛機高程圖
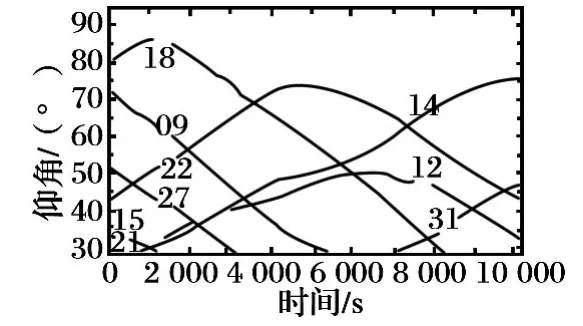
圖3 衛星仰角
對MR1 基線,其衛星數和模糊度固定情況如圖4 所示,可以看出,由新星升起或殘差過大導致模糊度需重新固定的計算時間小于50 s。文中在模糊度固定之后,利用消電離層組合作為觀測量,進行擴展Kalman 濾波得到移動站定位結果。同樣,可以計算得到MR2 定位結果,利用MR1 基線和MR2 基線做差得到R1 -R2 基線距離如圖5 所示。可以看出其與真值的差別在分米級。而把R1 當作移動基準站,計算R1-R2 基線,得到的移動基線R1 -R2 間的距離,從圖5 中可以看出其與兩基線差得到的R1-R2 距離相當一致。
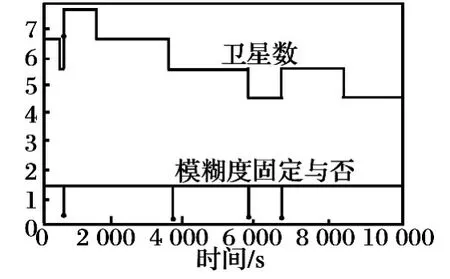
圖4 MR1 基線衛星數和模糊度固定情況(0 代表不固定,1 代表固定)
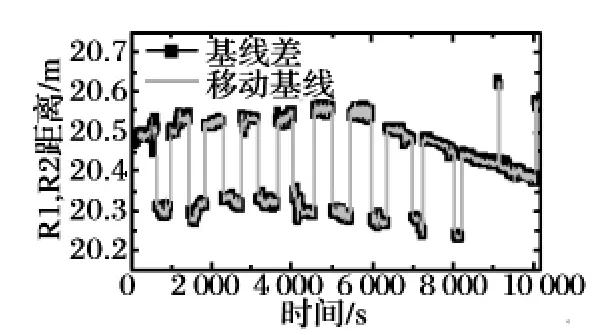
圖5 兩移動站R1,R2 之間的距離
3 結 論
文中利用電離層殘差法和M-W 組合來探測雙頻GPS 載波周跳,并把周跳當作新星升起,重新搜索模糊度。用電離層浮點模型,將每對衛星對應的雙差電離層延遲殘差參數化,與位置參數、模糊度參數同時求解,以此消除電離層殘差影響;用對流層經驗模型改正對流層延遲。并用擴展Kalman 濾波和LAMBDA 算法求解模糊度,研究機載雙頻GPS 定位精度。算例結果表明,利用文中所述方法能有效檢測出雙頻GPS 周跳,并在50 s 內恢復新星模糊度,利用兩條固定站-移動站基線得到的兩機載移動站間的距離與利用移動站-移動站基線計算得到的基線距離一致,與真值差別在分米級。文中的算法和算例具有通用性,對未來北斗二代衛星定位系統具有一定的指導意義和應用價值。
[1]王正明,易東云,周海銀,等. 彈道跟蹤數據的校準與評估[M].長沙:國防科技大學出版社,2008.
[2]黃丁發,熊勇良,袁林果. 全球定位系統—理論與實踐[M].成都:西南交通大學出版社,2006.
[3]Yu Xingwang,Zhang Xiaohong,Liu Jingnan,et al. Performance Assessment of Long Baseline Integer Ambiguity Resolution with Different Observation Models[C]//24th International Technical Meeting of the Satellite Division of the Institute of Navigation,Portland OR,2011.
[4]劉立龍. 動態對動態GPS 高精度定位理論及其應用研究[D].武漢:武漢大學,2005.
[5]Tiberius CCJM,Kenselaar F. Estimation of the Stochastic Model for GPS Code and Phase Observables[J]. Survey Review,2000,35(277):441 -454.
[6]李征航,張小紅. 衛星導航定位新技術及高精度數據處理方法[M]. 武漢:武漢大學出版社,2013.
[7]袁林,吳胤林,戰杰.中長基線下機載GPS 定位模糊度動態結算方法研究[J].航空兵器,2013 (5):22 -25.
[8]Vyas M R,Lim S,Rizos C,et al. Analysis of Zenith Path Delay in Dynamically Changing Environment[C]//IGNSS Symposium,Australia Sydney,2011.
[9]Saastamoinen J. Contributions to the Theory of Atmospheric Refraction[J]. Bulletin Geodesique,1973,107(1):13-34.
[10]張守信. GPS 技術與應用[M]. 北京:國防工業出版社,1999.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
