一種蜘蛛式微型起重機安全監管系統的研究
2015-11-04 02:55:44劉賀明陳曉峰
建筑機械化 2015年8期
關鍵詞:系統
劉賀明,陳曉峰,鄭 旭
(中國建筑科學研究院 建筑機械化研究分院,河北 廊坊 065000)
一種蜘蛛式微型起重機安全監管系統的研究
劉賀明,陳曉峰,鄭 旭
(中國建筑科學研究院 建筑機械化研究分院,河北 廊坊 065000)
介紹了自主研發的蜘蛛式微型起重機安全監管系統,起重機工作參數可通過人機界面顯示,使操作者能直觀全方面地了解起重機的工作狀態,避免誤操作和超載;
蜘蛛式微型起重機;安全監管系統;人機界面
蜘蛛式微型起重機具有體型小巧、通過能力強、自重輕、起重能力大、作業安全的特點,可以通過自身的行走機構、大載重電梯等運載工具方便進入建筑物內部或狹小空間完成起重作業任務,本文針對其電瓶供電、液壓控制、動態起重特性等工作特點,量身研發出一種可對其全面安全監管的系統。
1 監管系統的組成
如圖1所示,本系統由主機、人機界面、傾斜傳感器、臂角傳感器、臂頭滑輪傳感器、起升傳感器及繼電器輸出板等7個部分組成。
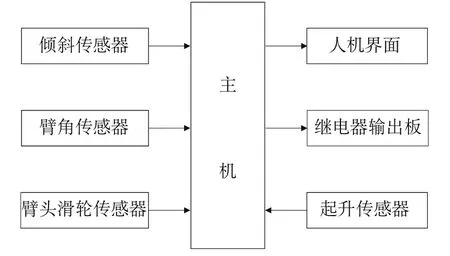
圖1 監管系統組成
2 各部件功能介紹
1)主機采用ARM開發平臺,主頻率為100MHz,提高系統運算速度,程序嵌入實時操作系統,提高系統的穩定性,它是整個系統的大腦,通過CAN總線接收各個傳感器采集的信息運算處理后,通過232總線發送給人機界面顯示,通過CAN總線發送命令給繼電器輸出板。
2)人機界面采用8寸電阻式觸摸屏(如圖2所示),負責錄入起重機參數、初始數據標定及實時顯示起重機工作參數。
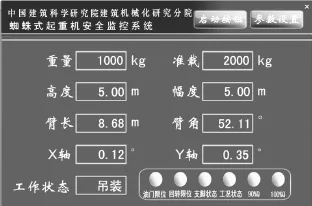
圖2 人機界面
3)傾斜傳感器采用高精度雙軸傾角SCA100T芯片,實時采集X、Y軸方向傾角。臂角傳感器采用高精度單軸傾角SCA61T芯片,實時采集大臂仰角。臂頭滑輪傳感器負責采集吊鉤吊載重量及臂頭滑輪轉動角度,重量采集部分由應變式重量傳感器、自跟蹤式電橋電源及高精度AD芯片組成,臂頭滑輪轉動角度部分采用霍爾元件。起升傳感器采用霍爾元件實時計算起升卷筒的轉動角度。以上傳感器獲得的數據均通過CAN總線發送給主機。
4)繼電器輸出板負責接收并執行主機命令,自動切斷設備往危險方向動作的液壓閥,避免事故發生。
3 高度及伸縮臂長計算方法
3.1 臂長的計算
已知起升卷筒直徑D1,臂頭滑輪的卷繞直徑D2,伸縮臂初始長度L0,通過起升傳感器測量的起升卷筒的轉動角度θ1,通過計算公式:S1=θ1πD1/360得到起升卷筒輸出的起升鋼絲繩長度S1;根據臂頭滑輪轉角傳感器測量的臂頭滑輪的轉動角度θ2,通過計算公式:S2=θ2πD2/360得到臂頭滑輪輸出的起升鋼絲繩長度S2,那么當前伸縮臂實際長度L=L0+(S1-S2),完成伸縮臂臂長的計算。
3.2 高度的計算
已知標定的初始高度H0,臂長L,吊鉤為2倍率,通過臂角傳感器計算當前的臂角為θ,通過計算公式:Hdb=Lsin(θ)得到大臂動作實現高度變化的值,根據臂頭滑輪轉角傳感器測量的臂頭滑輪的轉動角度θ2,通過計算公式H1=θ2πD2/(360×2)得到起升卷筒實現高度變化的值,當前高度H= H0+Hdb-H1。
4 動態起重特性下限載功能
蜘蛛式微型起重機根據支腿伸出位置不同,共有3種吊載工況,而每種工況又根據伸出臂長的不同分成6種起重性能表,最大吊載工況下的6種起重性能如表1所示。
系統采用以下方法解決了動態起重特性下實現限載功能。
如圖3所示,通過觸摸屏將18組起重特性曲線輸入,主機將輸入參數保存到片外掉電保存存儲器中。主機通過輸入檢測確定當前支腿所處工況(表2),再根據當前大臂伸縮長度,便可從輸入的18條起重特性中,找出當前所處起重特性參數,將此條起重特性參數帶入一元五次方程中,分別計算出相應的系數,再將當前的幅度值帶入此一元五次方程進行反求解,便可得到當前狀態下準載值Q,根據公式:Qb=Q0/Q,Qb為當前的載重比,Q0為當前吊鉤的吊載值,Q為當前的準載值,當Qb大于90%時,監控開始預警,當Qb大于等于100%時,監控開始報警并禁止設備往危險方向動作。
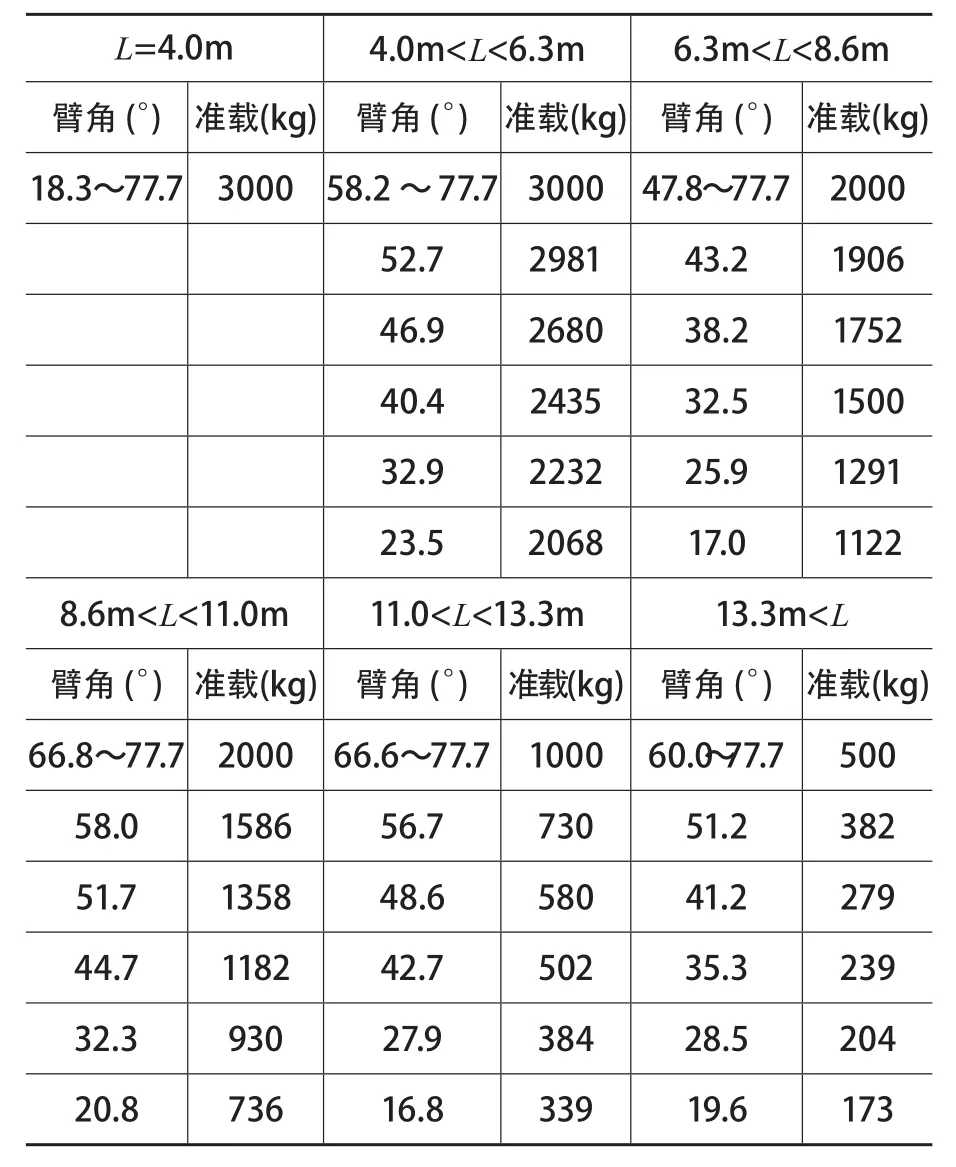
表1 起重性能表
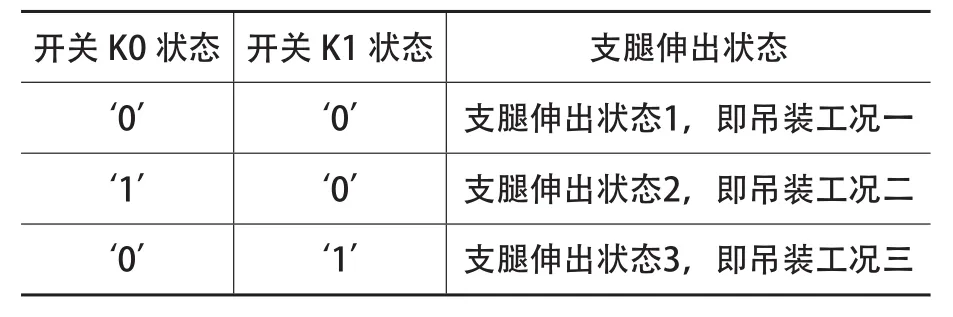
表2 檢測支腿工況

圖3 輸入起重特性曲線
5 結 語
本文介紹的蜘蛛式微型起重機安全監控系統,通過現場實際應用,能及時準確的計算出高度、幅度、臂長、傾斜、當前載重、載重比等工作參數,有效扼制設備超載運行,同時將起重機工作參數通過人機界面展示給使操作者,為設備的使用提供了安全保證。
(編輯 賈澤輝)
Study on the safety supervision system of a spider type micro crane
LIU He-ming, CHEN Xiao-feng, ZHENG Xu
國家“十二五”科技支撐計劃項目(2011BAJ02B04)
TH213.1
B
1001-1366(2015)08-0050-03
2015-06-15
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
