限幅模糊與帶閾值設置PID補償的變轉速液壓源流量控制方法研究
2015-10-29 05:01:32谷立臣
中國機械工程 2015年16期
馬 玉 谷立臣
西安建筑科技大學,西安,710055
限幅模糊與帶閾值設置PID補償的變轉速液壓源流量控制方法研究
馬玉谷立臣
西安建筑科技大學,西安,710055
針對目前變轉速泵控液壓系統對執行機構速度控制中出現的動態響應慢、轉速波動、精度低等問題,尤其是載荷快速多變工況下,流量和壓力的強耦合特性,控制流量具有時變和高度非線性特性,采用傳統PID控制或模糊控制都難以取得滿意的控制效果的現狀,提出采用限幅模糊與帶閾值設置的PID補償控制方法。控制系統先采用具有開環控制快速性的限幅模糊控制,快速接近目標流量,然后采用帶閾值設置的PID補償控制消除系統穩態誤差,該方法具有響應快、無超調、精度高的優點。仿真和實驗結果表明:該方法能夠實現典型工況下變轉速液壓動力源輸出流量的準確控制,大幅減小流量斜坡響應穩態誤差,系統控制性能遠優于傳統簡單控制方法的控制性能,適合變轉速容積調速系統在線控制。
變轉速液壓源;限幅模糊;PID補償;流量控制
0 引言
傳統的節流調速方式系統效率低、能耗大,變量泵容積調速方式系統結構復雜、抗污染能力差、故障率較高,且調速范圍和調速精度有限[1]。變轉速容積調速系統相比節流調速與變量泵容積調速而言具有結構簡單、可靠性高、效率高、調速范圍寬等優點,因此在液壓電梯[2]、注塑機[3]、盾構系統[4]中應用廣泛。
對執行機構速度控制的本質是對液壓動力源輸出流量的控制。國內學者從調速系統硬件改進和軟件控制算法方面進行了大量的研究。胡東明[5]對液壓電梯變轉速閉式電液系統速度控制特性進行了研究,針對大慣量變轉速容積調速液壓系統存在的共性問題和難點,提出了基于比例微分控制的前饋-反饋控制策略,分析了影響啟動性能的因素,并提出了基于專家控制器和模型預測控制的啟動控制方法;沈海闊等[6]針對電液變轉速控制系統響應速度慢的問題,提出了基于能量調節思想的控制策略,采用在傳統電液變轉速系統中加入能量調節裝置的方法,使系統保持低能耗的同時獲得比節流調速更高的響應速度;彭天好等[7]分析了變轉速泵控馬達調速系統產生轉速降落的原因,對油液壓縮、系統泄漏及電動機機械特性引起的轉速降落補償系數進行研究,得出了不同工況下轉速降落補償方法。上述研究都取得了非常好的控制效果,從不同角度解決了變轉速液壓調速系統動態響應慢、轉速波動、精度低等問題。
但是,目前大多數液壓調速系統仍采用負載速度大閉環控制系統,該系統存在環節多、時滯嚴重、不易調節等問題[8],控制算法局限于常規簡單PID控制方法,系統響應速度與超調量之間的矛盾不能得到解決。
為解決上述問題,本文采用永磁伺服電機驅動定量泵的變轉速液壓動力源,及定量泵出口流量負反饋的閉環控制方式,這樣可以有效避免多環節液壓系統負載速度大閉環所帶來的時滯問題。采用提出的限幅模糊與帶閾值設置的PID補償控制方法,在不同目標流量和載荷快速多變工況下,準確控制液壓動力源的輸出流量。該系統具有響應快速、無超調、精度高的優點,仿真和實驗驗證了該控制方法的可行性。
1 液壓動力系統結構及其模型
1.1液壓動力系統結構
液壓動力系統原理如圖1所示。該液壓系統由永磁電機驅動定量泵(齒輪泵)作為液壓動力源,由比例溢流閥模擬實際的負載,這樣簡潔、方便,避免了安裝實際負載所帶來的不便。系統流量由流量傳感器直接檢測泵出口流量,并送到控制器與永磁伺服電機速度閉環組成雙閉環控制;系統壓力由壓力傳感器檢測,并送到控制器與比例溢流閥模擬加載系統一起組成閉環控制。該系統可以根據模擬負載所需的壓力和流量,由變轉速液壓源提供完全匹配的壓力和流量,避免了傳統閥控液壓回路節流及溢流所帶來的能量損失。系統采用高響應速度的伺服電機,相比普通異步電機驅動的液壓系統,在控制精度和響應速度上得到了較大提高。
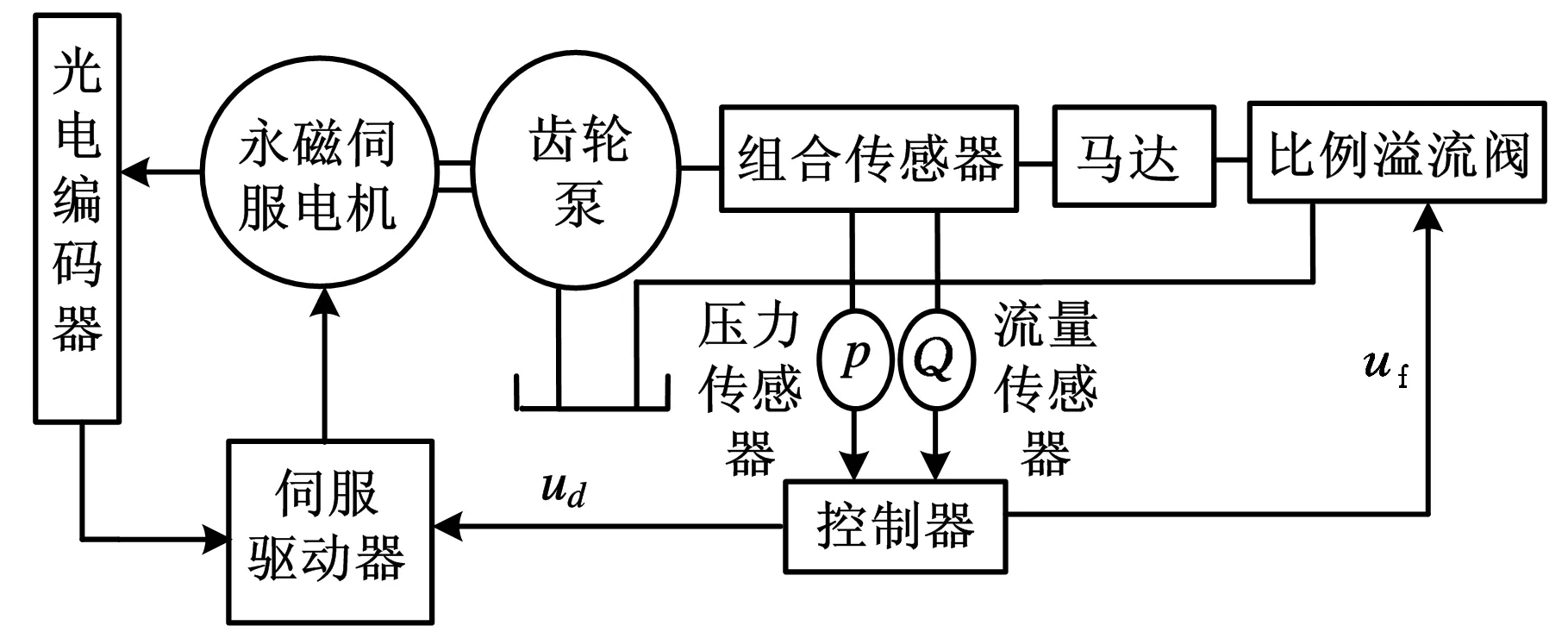
圖1 液壓動力系統原理圖
1.2液壓動力源模型
永磁同步電機的數學模型較復雜,通常我們為了分析方便常選用基于Park變換的d-q旋轉坐標系下的矢量控制數學模型[9]。可表示為
ud=rsid+sψd-ωrψq
(1)
uq=rsiq+s ψq-ωrψd
(2)
ψd=Ldid+ψf
(3)
ψq=Lqiq
(4)
Te=1.5s(ψdiq-ψqid)
(5)
式中,ud、uq為d、q 軸定子電壓分量;id、iq為 d、q 軸定子電流分量;s為極對數;ωr為轉子角速度;rs為定子繞組電阻;Ld、Lq為定子軸、交軸電感;ψf為轉子永磁體產生的磁鏈;ψd、ψq為d、q 軸定子磁鏈;Te為電磁轉矩。
齒輪泵的流量方程為[10]
(6)
式中,qp為泵輸出的流量;ω為泵(電機)的角速度;dp為泵的排量;pp為泵的出口壓力;Cp為泄漏系數;μ為液壓油的動力黏度;βe為油液彈性模量。
泵的驅動軸上的轉矩平衡方程為
(7)
2 限幅模糊與帶閾值設置PID補償控制
2.1限幅模糊控制工作原理與設計
變轉速容積調速液壓系統具有高度非線性、強耦合性、時變性等特性。由于系統本身的復雜性,如液壓油黏度系數隨溫度變化而變化,體積彈性模量隨油壓變化而變化,系統流量開環控制容易受不確定因素和負載的干擾,不穩定,所以本文采用流量閉環負反饋控制,流量閉環負反饋控制根據系統流量偏差的大小及變化率調節電機轉速,穩定泵的輸出流量,使之不受油液溫度、負載擾動、參數變化等因素的影響。
限幅模糊控制是在普通模糊控制器的基礎上對模糊控制器的輸出值進行限制,本文提出的限幅指的是模糊控制器的輸出會自動跟隨不同目標流量自動進行限幅,在控制系統流量時響應速度可以通過調整模糊控制器的參數達到開環響應的速度,系統流量快速接近目標流量,并且沒有超調量,解決了普通模糊控制響應速度與超調量之間的矛盾。
限幅模糊控制器的組成主要包括:①輸入模糊化;②模糊規則庫的建立;③模糊推理;④輸出解模糊;⑤輸出限幅。其中輸出限幅是整個模糊控制器的核心,基本結構如圖2所示。
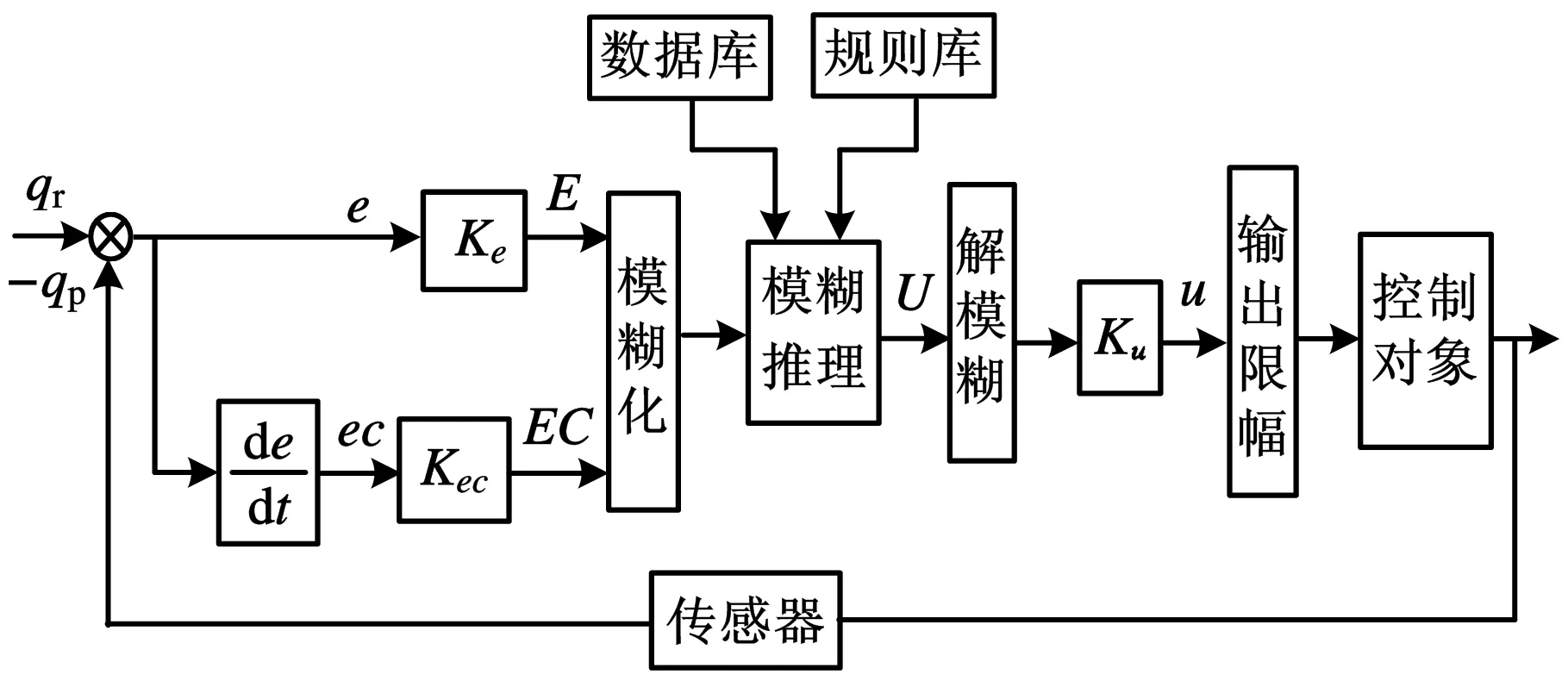
圖2 限幅模糊控制結構圖

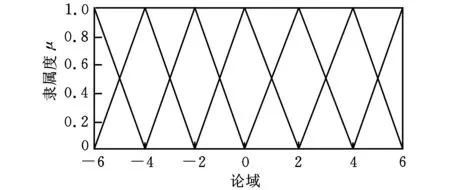
圖3 E、EC隸屬函數
限幅模糊控制器具體參數如下:采用二維模糊控制器,輸入、輸出變量的語言變量均采用{NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)}7個語言變量。輸入變量E和EC的模糊論域根據實驗要求均設為[-6,6],輸出變量U的模糊論域設置為[-3,3]。輸入變量和輸出變量的隸屬函數均采用三角形隸屬函數,如圖3、圖4 所示。基于經驗和領域專家的意見,建立模糊決策表,如表1所示,模糊推理采用Mamdani的max-min合成法,解模糊采用重心法,即加權平均法。模糊控制器的輸出根據目標流量的不同自動調整輸出進行限幅,控制電機轉速,進而控制系統流量。
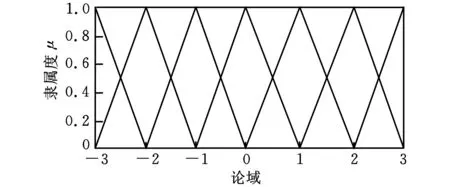
圖4 U的隸屬函數
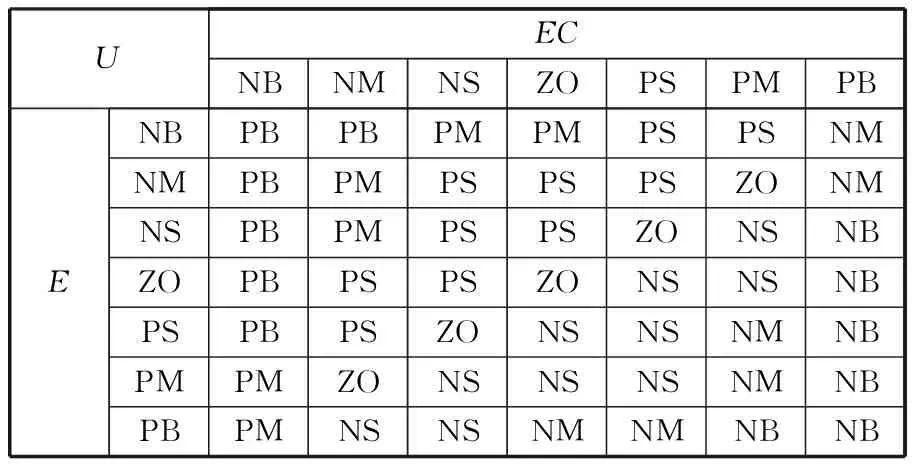
UECNBNMNSZOPSPMPBENBPBPBPMPMPSPSNMNMPBPMPSPSPSZONMNSPBPMPSPSZONSNBZOPBPSPSZONSNSNBPSPBPSZONSNSNMNBPMPMZONSNSNSNMNBPBPMNSNSNMNMNBNB
2.2帶閾值設置的PID補償控制原理
限幅模糊控制可以通過調整控制器參數來調整流量的響應速度,由于模糊控制屬于基于偏差調節的閉環控制,對液壓系統參數,如油液黏度、齒輪泵油液泄漏量等隨溫度變化而變化的參數及影響系統特性的非線性因素不敏感,所以控制精度高、穩定性好。
帶閾值設置的PID控制是在限幅模糊控制的基礎上給系統流量設置的一種補償控制,用于消除限幅控制所產生的系統流量穩態誤差。閾值設置為目標流量的3%(可根據具體實驗系統進行調整),當目標流量與實際流量的偏差小于閾值時,啟動PID補償控制;反之,當目標流量與實際流量的偏差大于閾值時,PID補償控制無效,僅由限幅模糊控制調整系統流量。具體結構框圖見圖5。

圖5 限幅模糊與帶閾值設置PID補償控制系統框圖
3 仿真和實驗
以永磁伺服電機驅動的變轉速液壓源為研究對象,對液壓源流量進行控制。采用11 kW永磁同步電機和排量為11 mL/r齒輪泵作為液壓動力源,利用比例溢流閥模擬負載給液壓系統加載,系統壓力取決于負載的大小,系統流量主要取決于電機轉速。
系統采用流量負反饋壓力自適應的閉環控制方式,流量負反饋具有穩定系統流量的作用,壓力自適應模式即泵的工作壓力自動地與負載壓力相適應。當負載增大時會引起系統壓力變大,泵的內泄增大使輸出流量變小,伺服控制器根據實測流量值與目標流量值進行對比,控制電機轉速使系統流量達到設定值,以適應負載壓力的要求;當負載減小時會引起系統壓力變小,泵的內泄減少,使得輸出流量變大,伺服控制器根據實測流量值與目標流量值進行對比,控制電機轉速減小,使系統流量達到設定值,適應負載壓力的要求。
3.1典型工況仿真結果對比
根據式(1)~式(7)數學模型運用MATLAB和Simulink建立永磁同步電機空間矢量PWM模型及整個控制系統模型,結合典型工況分別運用傳統PID控制、模糊控制及本文提出的限幅模糊與帶閾值設置的PID補償控制對變轉速液壓源流量進行控制仿真,結果如圖6所示。
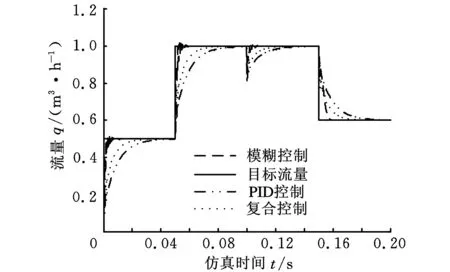
圖6 仿真結果對比
永磁電機主要參數如下: GK6交流永磁同步伺服電機,其型號為GK6087;其額定轉速nN=2000r/min;額定功率PN=11kW;電機極對數s=3;直流電壓300V;額定電流IN=9A;額定轉矩TN=11N·m;轉動慣量JD=62.4×10-4kg·m2。
齒輪泵主要參數為:額定壓力pN=20MPa;額定轉速nN=3000r/min;理論排量dp=11×10-6m3/r;轉動慣量Jp=8.2×10-5kg·m2。
由圖6的仿真結果可以看出,對不同目標流量0.5~1.0~0.6 m3/h的階躍響應,模糊控制通過調節參數響應速度雖然快,但是流量出現了局部振蕩與超調;PID控制雖然沒有出現超調,但流量響應速度慢;限幅模糊與帶閾值設置的PID串聯復合控制,通過設置合適的閾值,將限幅模糊控制的快速性與PID補償控制的精確性有機結合起來,流量響應快速且無超調。在0.1 s時,比例溢流閥模擬負載給系統加階躍向下載荷,流量減小,通過短暫調整流量恢復目標值。通過流量階躍響應與加載工況可以看出限幅模糊與帶閾值設置的PID補償控制性能優于參數固定的傳統PID控制與模糊控制。
3.2實驗分析
本實驗采用11 kW永磁同步電機和排量為11 mL/r的齒輪泵作為變轉速液壓動力源,采用電磁比例溢流閥來模擬壓力負載。測控平臺為研華工控機、PCI-1711多功能數據采集卡和PCLD-8710接線端子板,通過LWZY智能渦輪流量傳感器和壓力傳感器將系統流量和壓力信號傳送給PCI-1711多功能采集卡的模擬輸入端口,通過LabView8.6.0軟件平臺編寫的控制程序計算誤差,并得出最終輸出的控制量,控制電機轉速,進而控制系統流量,實驗裝置原理如圖7所示。
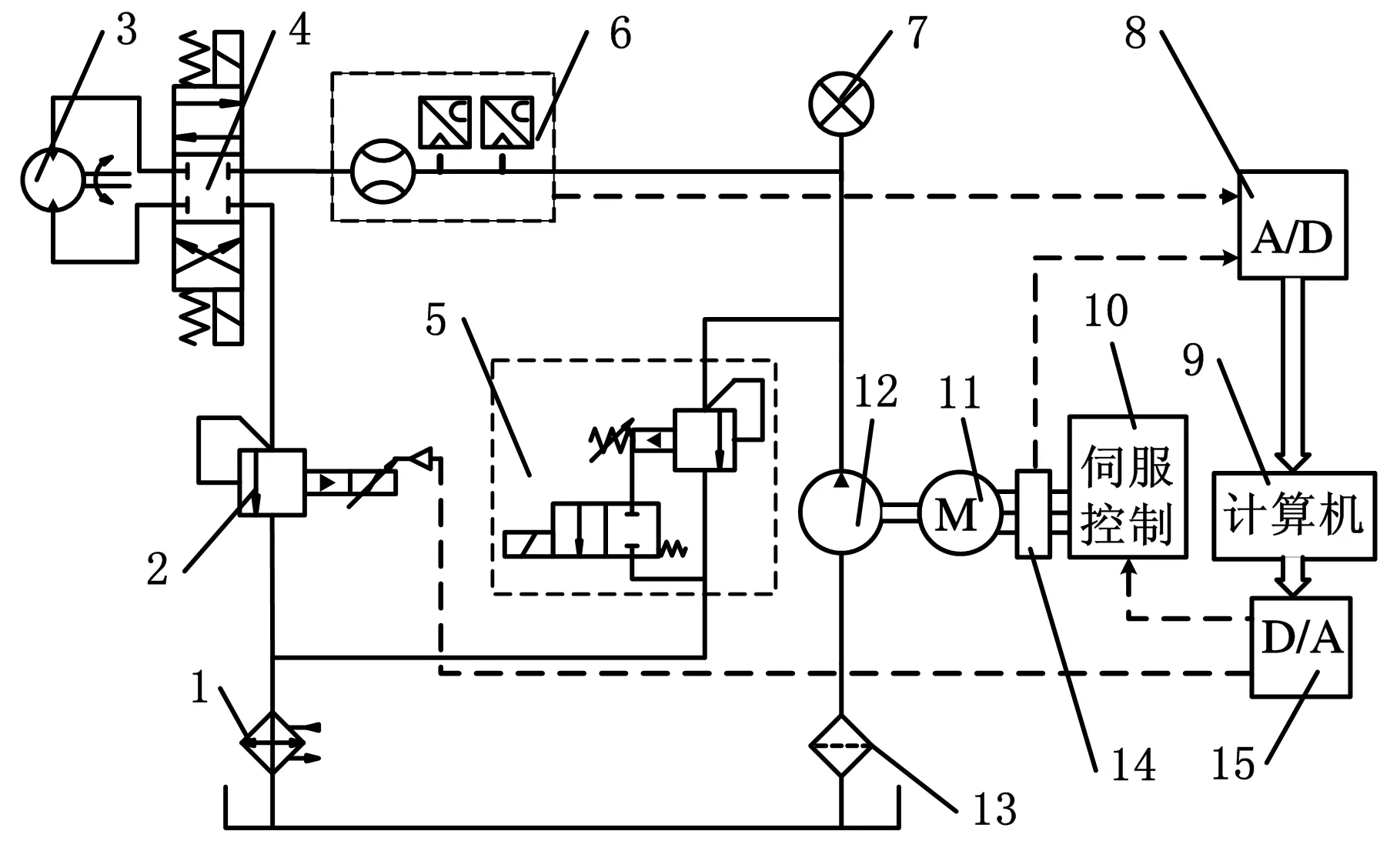
1.散熱器 2.比例溢流閥 3.油馬達 4.電磁換向閥 5.電磁溢流閥 6.組合傳感器 7.壓力表 8.A/D轉換器 9.上位計算機 10.伺服控制器 11.永磁電機 12.齒輪泵 13.過濾器 14.霍爾電壓、電流傳感器 15.D/A轉換器圖7 實驗裝置原理圖
為了證明本文提出的限幅模糊與帶閾值設置的PID補償控制方法的優越性,與傳統模糊控制和PID控制進行了實驗對比分析,結果如圖8~圖13所示。
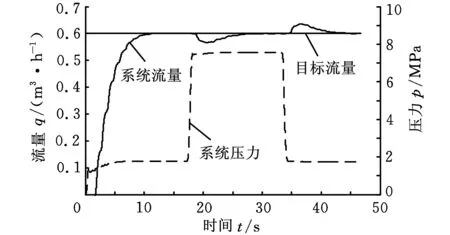
圖8 PID控制流量階躍響應
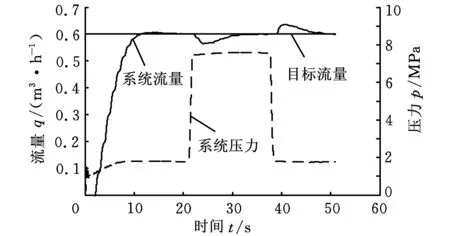
圖9 模糊控制流量階躍響應
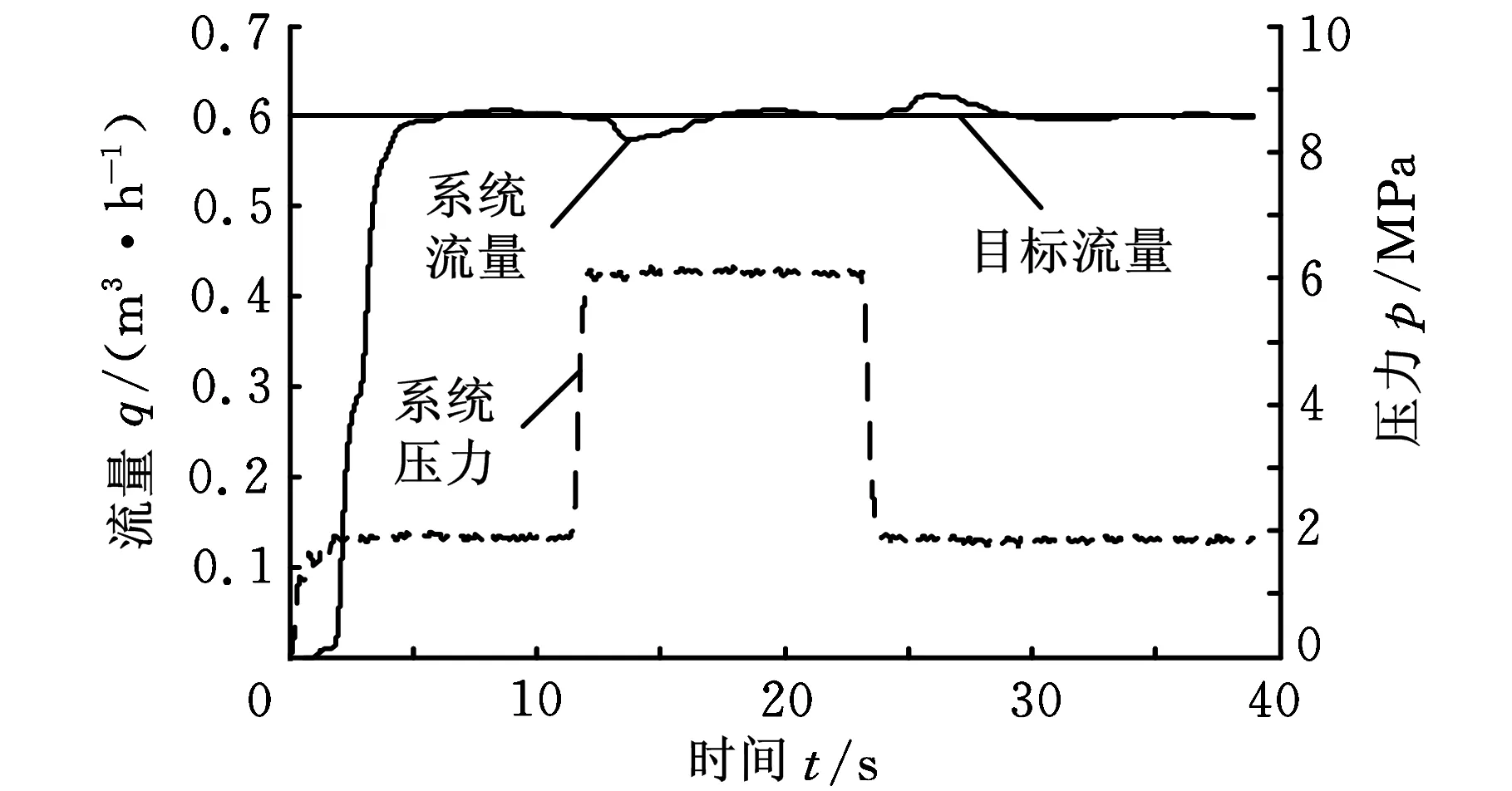
圖10 限幅模糊與帶閾值設置的PID補償控制流量階躍響應
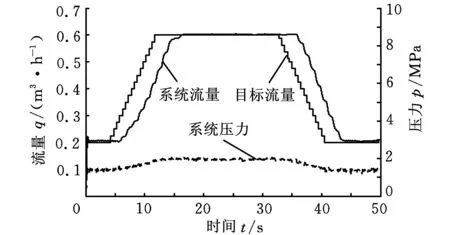
圖11 限幅模糊與帶閾值設置的PID補償控制流量斜坡響應(空載)
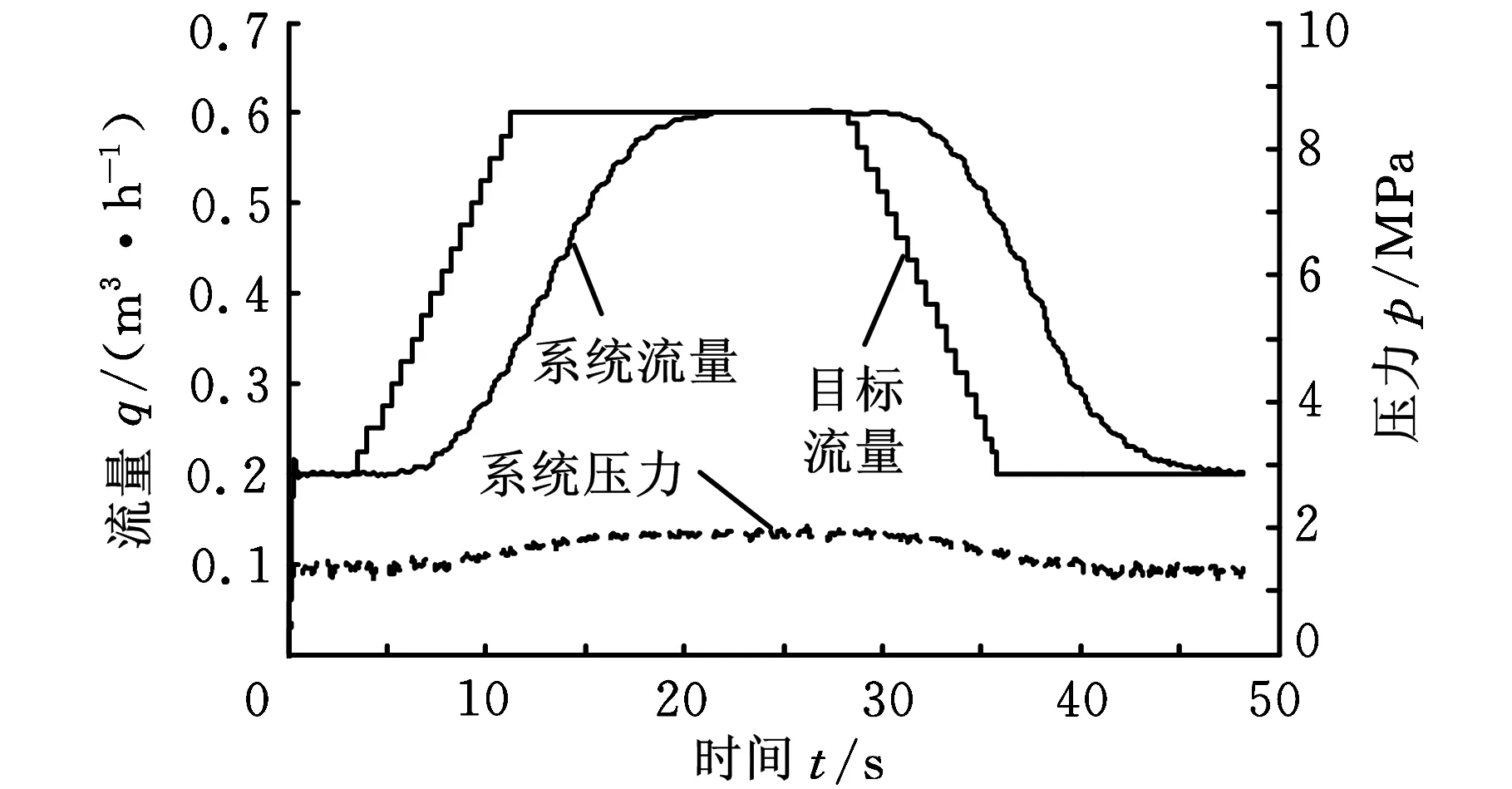
圖12 模糊控制流量斜坡響應
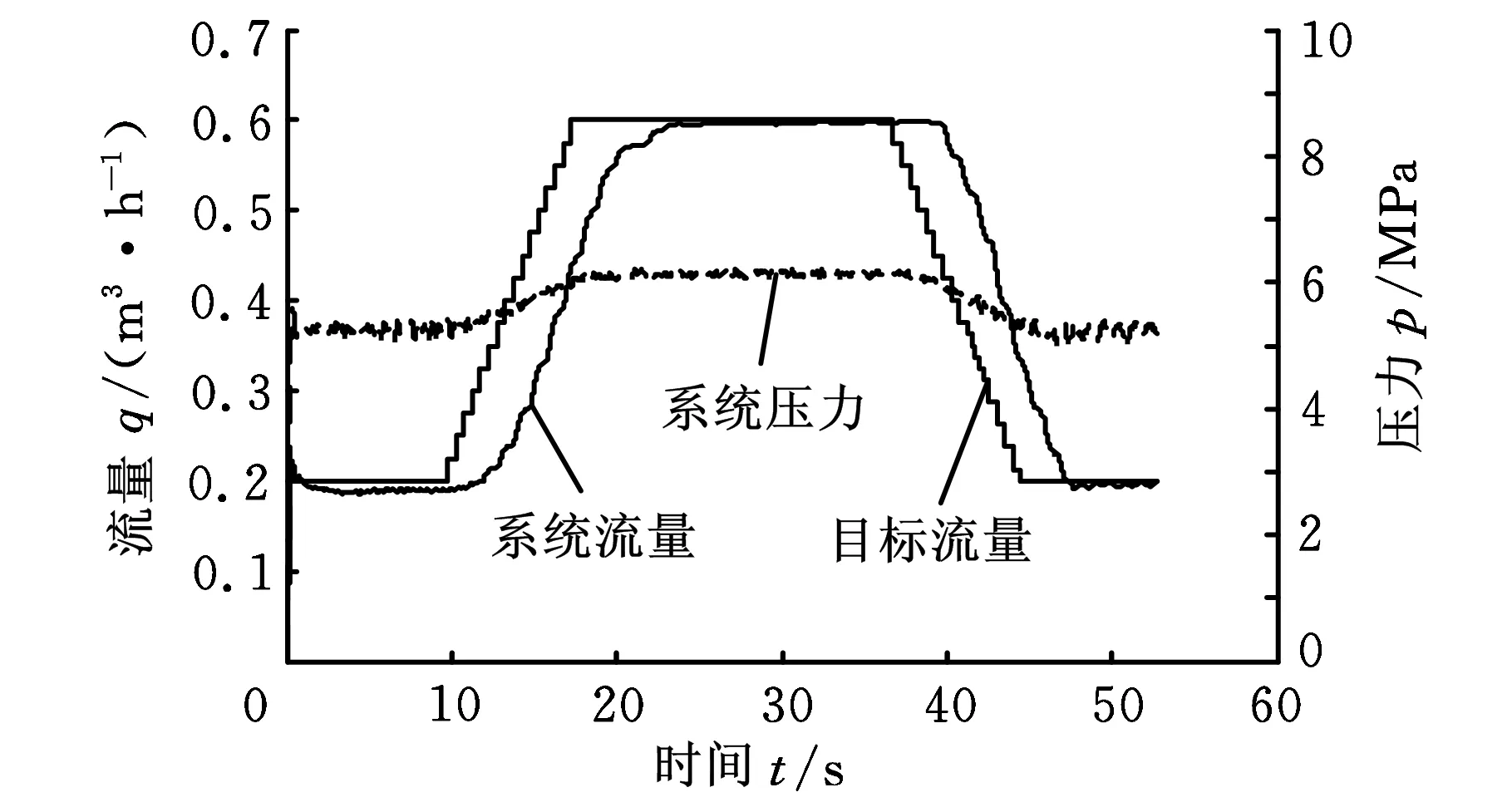
圖13 限幅模糊與帶閾值設置的PID補償控制流量斜坡響應(系統壓力為5.8 MPa)
圖8所示為傳統PID控制流量階躍響應實驗曲線,由圖8可以看出,PID控制的階躍響應上升時間約為10 s,系統流量無超調,流量穩定后用比例溢流閥加階躍上升、階躍下降載荷,系統壓力上升為7.4 MPa,溫度為20 ℃。由圖7可以看出,系統壓力階躍上升時,由于泵的泄漏量增加,所以流量會減小,但由于系統采用的是流量閉環控制,所以可以通過控制電機轉速的增加來補償泵泄漏的增加,系統流量經過7 s調整恢復穩定,達到設定的目標流量。同理,當系統壓力階躍下降時,流量會上升,通過閉環控制調節電機轉速,使系統流量達到設定的目標值。圖9為模糊控制流量階躍響應實驗曲線,由圖9可以看出,模糊控制的階躍響應上升時間約為11.5 s。圖8和圖9兩種控制結果說明,在響應的快速性上,傳統PID控制和模糊控制幾乎是一樣的,對相同的控制對象,通過調整控制器的參數兩種控制方法響應速度都可以改變,有一個共同點就是響應速度快,必然會導致系統超調。
圖10為本文提出的限幅模糊與帶閾值設置的PID 串聯復合控制階躍流量階躍響應實驗曲線,由圖10可以看出,流量的階躍響應時間為4.5 s,控制系統先采用限幅模糊控制讓系統流量快速接近目標流量,然后再用帶閾值設置的PID消除穩態誤差,閾值設置為目標流量的5%。系統加載壓力上升到6 MPa,流量在載荷突變的情況下出現波動,經過調整后仍可恢復穩定,說明復合控制同樣適合于液壓系統加載工況的控制,響應快速、無超調、控制精度高,動靜態性能良好,控制性能明顯優于傳統PID和模糊控制。
圖11為空載情況下限幅模糊與帶閾值設置的PID補償控制跟蹤斜坡信號的實驗結果曲線。從圖11可以看出,跟蹤斜坡上升和斜坡下降信號都存在穩態誤差,實測流量滯后于目標流量2.5 s,系統無超調量,且控制精度高。圖12為相同條件下的模糊控制斜坡跟蹤響應曲線,實測流量滯后目標流量5 s,明顯滯后于本文提出的控制方法。圖13為系統壓力為5.8 MPa時本文控制方法跟蹤斜坡信號的響應結果曲線,與空載情況相比控制效果基本未受影響。
以上實驗分析說明,限幅模糊與帶閾值設置的PID補償控制不僅能夠補償液壓系統本身所具有的多種非線性因素對控制系統的影響,如:負載擾動引起的泄漏量、溫度變化引起油液黏度及體積壓縮量的變化等非線性因素都能給予補償,而且可以通過調節控制器參數達到開環控制響應的速度,系統響應快速、無超調、精度高,控制性能明顯優于單一傳統控制方法,適合變轉速容積調速系統在線控制。
4 結論
(1)限幅模糊控制屬于閉環控制,但克服了所有閉環控制“邊調邊算”響應速度慢的問題,通過調節控制器參數使系統具有開環控制響應快速的特性,并且控制系統無超調。限幅模糊控制流量階躍響應時間為4.5 s,與模糊控制或PID控制的流量階躍響應時間10 s比較,縮短5.5 s。
(2)限幅模糊控制能夠補償液壓系統負載擾動引起的油液泄漏量損失和體積壓縮量損失對流量控制的影響。
(3)帶閾值設置的PID補償控制可以消除限幅模糊控制所產生的穩態誤差,提高控制精度。
(4)限幅模糊與帶閾值設置的PID補償控制解決了單一控制方法響應快速與超調量之間的矛盾,性能(快、準、穩)明顯優于單一控制方法。
[1]賈永峰,谷立臣.模型與條件PID補償的永磁伺服電動機驅動液壓源流量控制[J].機械工程學報,2014,50(8):197-204.
Jia Yongfeng, Gu Lichen. Model and Conditional PID Compensation Control on Flow of Hydraulic Source Driven by Permanent Magnet Servo Motor[J].Journal of Mechanical Engineering, 2014,50(8):197-204.
[2]胡東明,徐兵,楊華勇. 變頻驅動的閉式回路節能型液壓升降系統[J]. 浙江大學學報,2008,42(2):209-214.
Hu Dongming,Xu Bing, Yang Huayong. VVVF Controlled Closed-circuit Energy-saving Hydraulic Lift System[J]. Journal of Zhejiang University, 2008,42(2):209-214.
[3]彭勇剛,韋巍. 伺服電動機直接驅動定量泵液壓系統在精密注塑機中的應用及其控制策略[J]. 機械工程學報,2011,47(2):173-179.
Peng Yonggang,Wei Wei. Application and Control Strategy of Servo Motor Driven Constant Pump Hydraulic System in Precision Injection Molding[J]. Journal of Mechanical Engineering,2011,47(2):173-179.
[4]楊華勇,邢 彤,龔國芳. 變轉速泵控模擬盾構刀盤驅動系統研究[J]. 浙江大學學報,2010,44(2):373-378.
Yang Huayong, Xing Tong, Gong Guofang. Variable Speed Pump Control System for Driving Cutter Head of Test Shield Tunneling Machine[J]. Journal of Zhejiang University, 2010,44(2):373-378.
[5]胡東明.液壓電梯變轉速閉式電液系統速度控制特性研究[D].杭州:浙江大學,2009.
[6]沈海闊,金波,陳鷹.基于能量調節的電液變轉速控制系統[J].機械工程學報,2009,45(5):209-213.
Shen Haikuo,Jin Bo, Chen Ying. Variable Speed Hydraulic Control System Based on Energy Regulation Strategy[J]. Journal of Mechanical Engineering,2009,45(5):209-213.
[7]彭天好,樂南更.變轉速泵控馬達系統轉速降落補償試驗研究[J].機械工程學報,2012,48(4):175-181.
Peng Tiaohao,Yue Nangeng. Speed Loss Compensation Experiment Study in Variable-speed Pump-control-motor System[J]. Journal of Mechanical Engineering,2012,48(4):175-181.
[8]彭天好,孫繼亮,汲方林. 變轉速液壓容積調速系統的控制結構[J]. 機床與液壓,2005(6):119-120.
Peng Tianhao,Sun Jiliang,Ji Fanglin.Control Structure of Variable Rotational Speed Hydraulic System[J].Machine Tool & Hydraulics,2005(6):119-120.
[9]楊耕.電機與運動控制系統[M].北京:清華大學出版社,2006.
[10]馬玉,谷立臣. 伺服電機驅動的液壓動力系統及其神經網絡自適應優化控制[J]. 中國機械工程,2014,25(9):1239-1243.
Ma Yu,Gu Lichen. Neural Network Adaptive Optimal Control Strategy of Servo Motor Driven Hydraulic System[J]. China Mechanical Engineering, 2014,25(9):1239-1243.
(編輯王艷麗)
Research on Limiting Fuzzy and PID Compensation with Threshold Settings Control for Flow of Variable Speed Hydraulic Source
Ma YuGu Lichen
Xi’an University of Architecture and Technology,Xi’an,710055
In view of the existing defects in speed control of variable speed pump controlled hydraulic systems,such as slow response, speed fluctuation and low control accuracy, especially in the fast-changing load conditions, due to the strong coupling characteristics of flow and pressure, flow control became uncertain, variable and highly nonlinear, conventional PID control or fuzzy control were difficult to obtain satisfactory control results. A limiting fuzzy and PID compensation with threshold settings control strategy was presented herein.The control system firstly used limiting fuzzy control, which had fast response of open-loop control to approach target flow, then adopted PID compensation with threshold settings control to eliminate the system steady-state errors,and had a fast response, no overshoot, high precision advantages. The simulation and experimental results show: this method can realize the precise control of flow of variable hydraulic power source on typical conditions. Significantly reducing the steady-state errors of slope response, system control performance is much better than that of simple traditional control methods, and is suitable for the on line control of volume speed modulation of variable speed system.
variable speed hydraulic source; limiting fuzzy; PID compensation; flow control
2015-01-06
國家自然科學基金資助項目(51275375)
TP273DOI:10.3969/j.issn.1004-132X.2015.16.012
馬玉,女,1978年生。西安建筑科技大學機電學院講師、博士。研究方向為智能控制、機電液一體化技術。谷立臣,男,1956年生。西安建筑科技大學機電學院教授、博士研究生導師。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
