快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)節(jié)能性研究
2015-10-29 05:01:24翟富剛李雪冰孔祥東
中國機(jī)械工程 2015年16期
關(guān)鍵詞:系統(tǒng)
翟富剛 李雪冰 姚 靜, 周 芳 孔祥東,
1.先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室(燕山大學(xué)),秦皇島,0660042.燕山大學(xué)河北省重型機(jī)械流體動力傳輸與控制實(shí)驗(yàn)室,秦皇島,066004
快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)節(jié)能性研究
翟富剛1李雪冰2姚靜1,2周芳2孔祥東1,2
1.先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室(燕山大學(xué)),秦皇島,0660042.燕山大學(xué)河北省重型機(jī)械流體動力傳輸與控制實(shí)驗(yàn)室,秦皇島,066004
為了從快鍛液壓機(jī)的能量源頭出發(fā)降低系統(tǒng)的溢流損失和壓力損失,提出了一種快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng),通過相關(guān)理論對泵閥復(fù)合控制系統(tǒng)的節(jié)能機(jī)理進(jìn)行了定性分析,通過實(shí)驗(yàn)定量研究了泵閥復(fù)合控制系統(tǒng)的能耗。實(shí)驗(yàn)結(jié)果表明:快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)的能量利用率達(dá)到了31.9%,與電液比例閥控系統(tǒng)相比提高了近5倍,同時(shí)泵閥復(fù)合控制系統(tǒng)的輸入功率僅為電液比例控制系統(tǒng)的18.4%。研究結(jié)果對提高快鍛液壓機(jī)的能量利用率并降低系統(tǒng)能耗具有重要意義。
快鍛液壓機(jī);泵閥復(fù)合控制;能量利用率;節(jié)能
0 引言
快鍛液壓機(jī)具有運(yùn)行平穩(wěn)、速度快、精度好、自動化程度高等諸多優(yōu)點(diǎn),目前在自由鍛造設(shè)備領(lǐng)域被認(rèn)為是發(fā)展的主要方向之一[1]。相對于泵控液壓系統(tǒng)來說,電液比例閥控系統(tǒng)具有響應(yīng)快、成本低的特點(diǎn),為快鍛液壓機(jī)所普遍采用,但同時(shí)閥控系統(tǒng)存在著能量利用率低、能耗高等一系列問題[2-4]。隨著“中國制造2025”的實(shí)施和推進(jìn),社會對節(jié)能降耗日趨重視,綠色節(jié)能將成為未來快鍛液壓機(jī)發(fā)展的主要方向。因此,針對快鍛液壓機(jī)液壓系統(tǒng),探尋新的節(jié)能原理或節(jié)能方式具有重要的現(xiàn)實(shí)意義。逄振旭等[5]研究了快鍛工況PID 控制器參數(shù)對系統(tǒng)能耗影響;管成[6]提出了機(jī)械-液壓復(fù)合式節(jié)能控制系統(tǒng),利用機(jī)械飛輪和蓄能器配合達(dá)到液壓機(jī)常鍛工況節(jié)能的目的;姚靜等[7]提出了采用蓄能器的液壓機(jī)新型節(jié)能快鍛回路。上述方法雖然在一定程度上降低了系統(tǒng)的能耗,但仍未從根本上解決快鍛液壓機(jī)能量利用率低的問題。
近年來,變頻技術(shù)的發(fā)展為液壓系統(tǒng)的節(jié)能提供了一種新方法,即采用變頻電機(jī)驅(qū)動定量泵實(shí)現(xiàn)泵的流量調(diào)節(jié),從源頭上減少系統(tǒng)的能量損失。文獻(xiàn)顯示,日本三菱公司最早將變頻液壓技術(shù)用于液壓電梯,并實(shí)現(xiàn)了市場化,獲得了良好的節(jié)能效果[8];徐兵等[9-10]通過全變頻驅(qū)動液壓電梯控制系統(tǒng)與閥控系統(tǒng)的對比研究發(fā)現(xiàn),前者比后者節(jié)能40%。變頻技術(shù)已成為液壓系統(tǒng)節(jié)能的一種發(fā)展趨勢,但低響應(yīng)性能制約了其在高動態(tài)特性要求系統(tǒng)中的應(yīng)用。
1 泵閥復(fù)合控制原理
基于變頻調(diào)節(jié)的快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)原理如圖1所示,主要由變頻動力源單元和獨(dú)立節(jié)流口閥控缸單元組成。其中,變頻動力源單元主要由變頻器1、電機(jī)2、定量泵3、安全閥4和單向閥5組成,通過調(diào)整變頻器的輸入頻率實(shí)現(xiàn)定量泵3輸出流量的無級調(diào)節(jié)。獨(dú)立節(jié)流口閥控缸單元由主缸進(jìn)液閥6、主缸排液閥7、回程缸進(jìn)液閥8、回程缸排液閥9、主缸10和回程缸11組成。活動橫梁12下行時(shí),主缸進(jìn)液閥6、回程缸排液閥9工作,位移傳感器13采集的活動橫梁的實(shí)際位移與給定位移比較,通過控制器15構(gòu)成位置閉環(huán)控制主缸進(jìn)液閥和回程缸排液閥的閥芯位移,進(jìn)而控制活動橫梁位置。同時(shí),變頻動力源單元通過壓力傳感器14檢測主缸壓力、回程缸壓力和泵口壓力,通過控制器構(gòu)成壓力閉環(huán)調(diào)節(jié)變頻器頻率來控制電機(jī)的轉(zhuǎn)速,進(jìn)而改變定量泵的輸出流量,實(shí)現(xiàn)泵口壓力跟隨負(fù)載壓力的變化且壓差保持恒定。快鍛回程時(shí),回程缸進(jìn)液閥8、主缸排液閥7工作,控制原理與壓下過程一樣,在此不再贅述。

1.變頻器 2.電機(jī) 3.定量泵 4.安全閥 5.單向閥 6.主缸進(jìn)液閥 7.主缸排液閥 8.回程缸進(jìn)液閥 9.回程缸排液閥 10.主缸 11.回程缸 12.活動橫梁 13.位移傳感器 14.壓力傳感器 15.控制器圖1 快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)原理示意圖
快鍛液壓機(jī)泵閥復(fù)合控制方框圖見圖2,本文實(shí)驗(yàn)采用PID控制器對快鍛液壓機(jī)位置閉環(huán)和壓力閉環(huán)進(jìn)行控制。

圖2 快鍛液壓機(jī)泵閥復(fù)合控制方框圖
2 泵閥復(fù)合控制節(jié)能機(jī)理
2.1電液比例閥控系統(tǒng)功率
2.1.1下行時(shí)系統(tǒng)功率
快鍛液壓機(jī)壓下時(shí),活動橫梁下行,主缸進(jìn)液閥和回程缸排液閥的流量Q1、Q4分別為
(1)
(2)
式中,xv1、xv4分別為主缸進(jìn)液閥和回程缸排液閥的閥芯位移;ω為閥口面積梯度;Cd為流量系數(shù);ρ為油液的密度;ps1為下行時(shí)泵口壓力;pt為油箱壓力;p1、p2分別為主缸和回程缸的壓力;A1為主缸面積;A2為回程缸面積;y為活動橫梁的位移(即液壓缸運(yùn)動的位移)。
定義主缸面積A1與回程缸面積A2的比值γ=A1/A2,主缸進(jìn)液閥與回程缸排液閥閥芯位移比為α1=xv1/xv4。假定pt=0,由式(1)、式(2)可得
(3)
下行時(shí),活動橫梁的力平衡方程為
(4)
式中,m為活動橫梁的質(zhì)量;Bp為阻尼系數(shù);Ff為摩擦阻力;FL為負(fù)載力。
由式(3)、式(4)得泵口壓力為
(5)
電液比例快鍛系統(tǒng)的液壓泵為定流量輸出,設(shè)泵的輸出流量為Qs1,則下行時(shí)輸出功率為
(6)
2.1.2上行時(shí)系統(tǒng)功率
快鍛液壓機(jī)回程時(shí),活動橫梁上行,主缸排液閥和回程缸進(jìn)液閥的流量Q2、Q3分別為
(7)
(8)
式中,xv2和xv3主缸排液閥和回程缸進(jìn)液閥的閥芯位移;ps2為上行時(shí)泵口壓力。
定義主缸排液閥和回程缸進(jìn)液閥閥芯位移之比為α2=xv2/xv3。假定pt=0,由式(7)、式(8)可得
(9)
上行時(shí),活動橫梁的力平衡方程為
(10)
由式(9)、式(10)得泵出口壓力ps2為
(11)
電液比例快鍛系統(tǒng)定量泵的輸出流量為Qs2,則上行時(shí)輸出功率為
(12)
2.2泵閥復(fù)合控制系統(tǒng)功率
2.2.1下行時(shí)系統(tǒng)功率

(13)
下行時(shí),活動橫梁的力平衡方程為
(14)

由式(13)、式(14)可得
(15)

(16)
式中,f為壓機(jī)的快鍛頻率;S為快鍛行程;t為時(shí)間。
由式(15)、式(16)得下行時(shí)泵的輸出功率為
(17)
2.2.2上行時(shí)系統(tǒng)功率
(18)
上行時(shí),活動橫梁的力平衡方程為
(19)
由式(18)、式(19)可得
(20)

(21)
由式(20)、式(21)得上行時(shí)泵的輸出功率為
(22)
2.3兩種系統(tǒng)的功率比較
2.3.1下行時(shí)系統(tǒng)功率對比
活動橫梁下行時(shí),電液比例閥控系統(tǒng)與泵閥復(fù)合控制系統(tǒng)泵消耗功率差ΔP1為
(23)


(24)
假設(shè)Qs1=Q1,即系統(tǒng)無溢流,Q1取最大值πA1fS,得
(25)
以0.6MN中試液壓機(jī)的基本參數(shù)(表1)為例,Δp=2 MPa,α1的取值范圍為0.2≤α1≤0.7,p2的取值范圍為2 MPa≤p2≤6 MPa。以α1、p2為橫坐標(biāo)軸,繪制下行時(shí)兩系統(tǒng)功率差ΔP1曲面,如圖3所示。可以看出,隨著p2的增大系統(tǒng)功率差ΔP1增大,且閥芯位移比α1越大,ΔP1越小。功率差ΔP1所描繪的曲面全部在零平面之上,即ΔP1>0,表明下行時(shí),電液比例閥控系統(tǒng)泵的輸出功率大于泵閥復(fù)合控制系統(tǒng)泵的輸出功率。

表1 中試快鍛液壓機(jī)主要參數(shù)

圖3 下行時(shí)兩系統(tǒng)功率差
2.3.2上行時(shí)系統(tǒng)功率對比
同理,由式(12)和式(22)整理可得活動橫梁上行時(shí),電液比例閥控系統(tǒng)與泵閥復(fù)合控制系統(tǒng)泵消耗功率差ΔP2為

(26)
以0.6 MN中試液壓機(jī)的基本參數(shù)(表1)為例繪制上行時(shí)兩系統(tǒng)功率差ΔP2曲面,如圖4表示。可以看出,隨著p1的增大系統(tǒng)功率差ΔP2增大,且閥芯位移比α2越大,ΔP2越大。功率差ΔP2所描繪的曲面全部在零平面之上,即ΔP2>0,表明上行時(shí),電液比例閥控系統(tǒng)泵的輸出功率大于泵閥復(fù)合控制系統(tǒng)泵的輸出功率。

圖4 上行時(shí)兩系統(tǒng)功率差
綜上,在整個(gè)工作行程內(nèi),電液比例閥控系統(tǒng)的輸出功率均大于泵閥復(fù)合控制系統(tǒng)的輸出功率。對于同一負(fù)載,壓機(jī)推動活動橫梁所消耗的有用功是相同的,因此系統(tǒng)的輸出功率越小,系統(tǒng)的能量利用率也就越高,系統(tǒng)也就越節(jié)能。
3 實(shí)驗(yàn)研究
3.10.6 MN中試快鍛液壓機(jī)實(shí)驗(yàn)平臺
實(shí)驗(yàn)依托于燕山大學(xué)河北省重型機(jī)械流體動力傳輸與控制實(shí)驗(yàn)室的0.6 MN中試快鍛液壓機(jī)實(shí)驗(yàn)平臺,如圖5所示。該平臺液壓系統(tǒng)原理見圖1。

圖5 中試快鍛液壓機(jī)實(shí)驗(yàn)平臺
為了增加實(shí)驗(yàn)結(jié)果的可比性,電液比例閥控系統(tǒng)和泵閥復(fù)合控制系統(tǒng)兩個(gè)實(shí)驗(yàn)均在0.6 MN中試快鍛液壓機(jī)實(shí)驗(yàn)平臺上完成。電液比例閥控系統(tǒng)實(shí)驗(yàn)時(shí)通過變頻器調(diào)定電機(jī)轉(zhuǎn)速恒定為750 r/min,其他實(shí)驗(yàn)條件與泵閥復(fù)合控制實(shí)驗(yàn)保持一致。0.6 MN中試快鍛液壓機(jī)主要參數(shù)如表1所示。
3.2電液比例閥控系統(tǒng)能耗實(shí)驗(yàn)分析
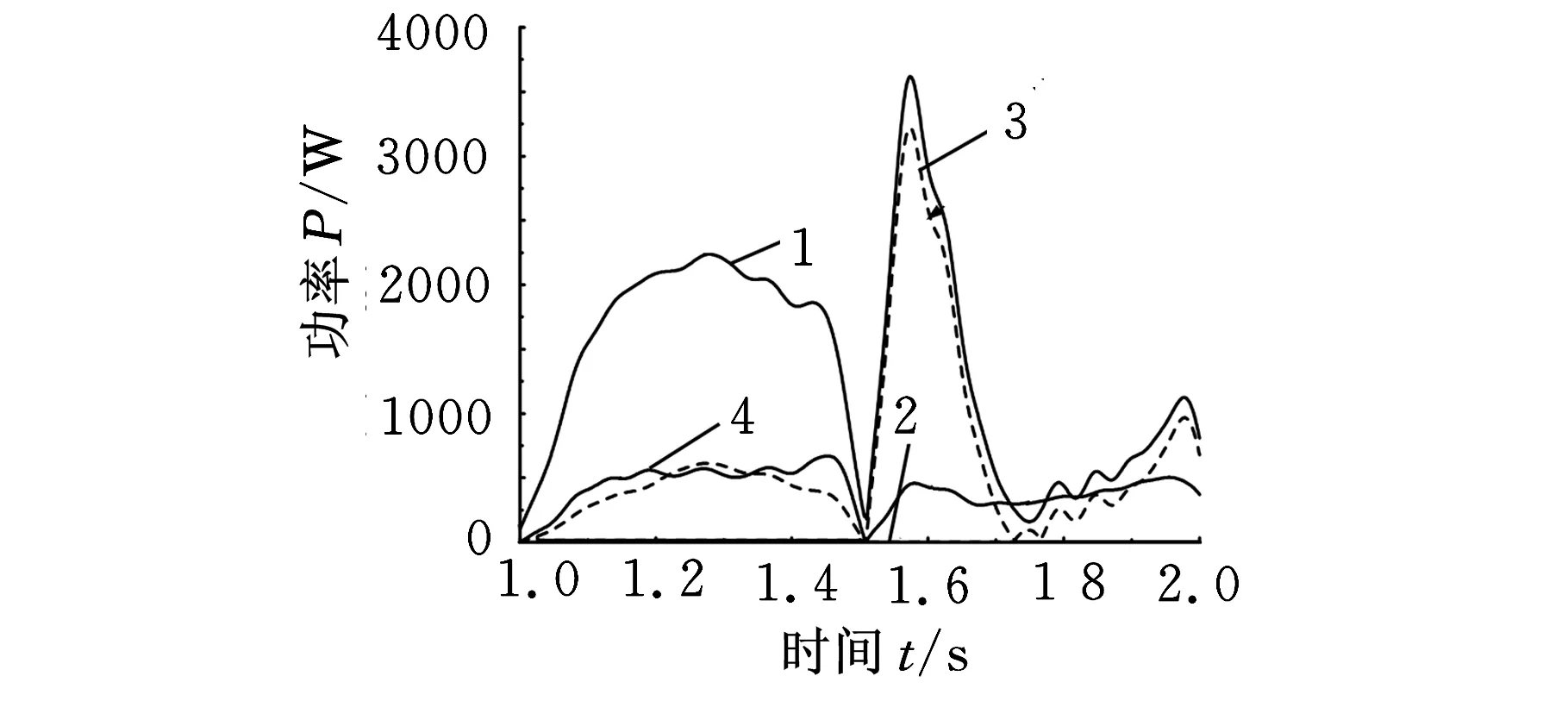
實(shí)驗(yàn)給定位移為正弦曲線,鍛造頻率為1 Hz,幅值15 mm,系統(tǒng)壓力為10 MPa,電液比例閥控系統(tǒng)各部分功率曲線如圖6所示。可以看出,系統(tǒng)輸入功率曲線基本恒定,壓機(jī)上行時(shí),由于回程缸面積較小,溢流損失功率較大;而下行時(shí)系統(tǒng)給主缸供液,溢流損失的功率相對較小。

(a)功率曲線

(b)一個(gè)周期內(nèi)功率曲線1.系統(tǒng)輸入功率曲線 2.溢流損失功率曲線 3.主缸油路節(jié)流損失功率曲線 4.回程缸油路節(jié)流損失功率曲線圖6 電液比例閥控系統(tǒng)功率實(shí)驗(yàn)曲線
根據(jù)圖6曲線計(jì)算3s內(nèi)快鍛液壓機(jī)的能耗,如表2所示,表中W1為負(fù)載消耗的能量,W2為回程缸油路節(jié)流損失能量,W3為主缸油路節(jié)流損失能量,W4為溢流損失能量,W5為系統(tǒng)輸入能量。可以看出,負(fù)載消耗的能量僅占系統(tǒng)輸入能量的5.5%,而溢流損失的能量占比59.3%,3 s內(nèi)溢流能耗高達(dá)13.18 kJ,這是由于電液比例閥控系統(tǒng)為了滿足液壓機(jī)快速響應(yīng)的要求,“定量泵+溢流閥”構(gòu)成的動力源長期處于高壓溢流狀態(tài)產(chǎn)生的能耗損失。另外,系統(tǒng)節(jié)流損失消耗的能量也是相當(dāng)巨大的,主缸油路和回程缸油路節(jié)流損失的能量分別是2.07 kJ和5.76 kJ,兩者總能耗相加占比達(dá)到36.2%,這部分能耗是高壓油流經(jīng)比例閥液阻產(chǎn)生的壓力損失。
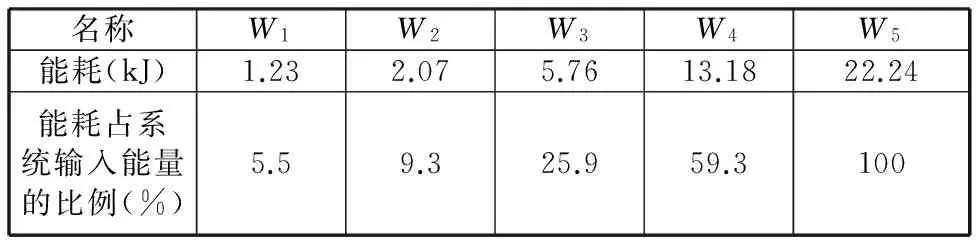
表2 快鍛液壓機(jī)電液比例閥控系統(tǒng)能耗表
3.3泵閥復(fù)合控制系統(tǒng)能耗實(shí)驗(yàn)分析
壓差Δp是泵閥復(fù)合控制系統(tǒng)壓力閉環(huán)控制的目標(biāo),前面理論分析可知其值對泵閥復(fù)合控制系統(tǒng)的特性具有重要的影響。圖7所示為壓差Δp不同時(shí)泵閥復(fù)合控制系統(tǒng)的功率實(shí)驗(yàn)曲線,可以看出,隨著Δp的增大,系統(tǒng)輸入功率、回程缸油路節(jié)流損失功率和主缸油路的節(jié)流損失功率均增大。因此,從能耗角度,Δp越小越好。
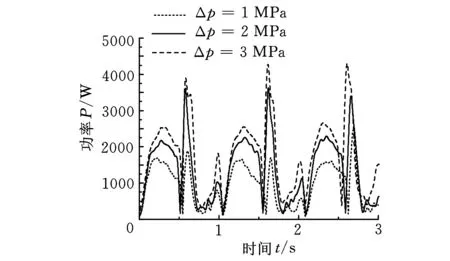
(a)系統(tǒng)輸入功率
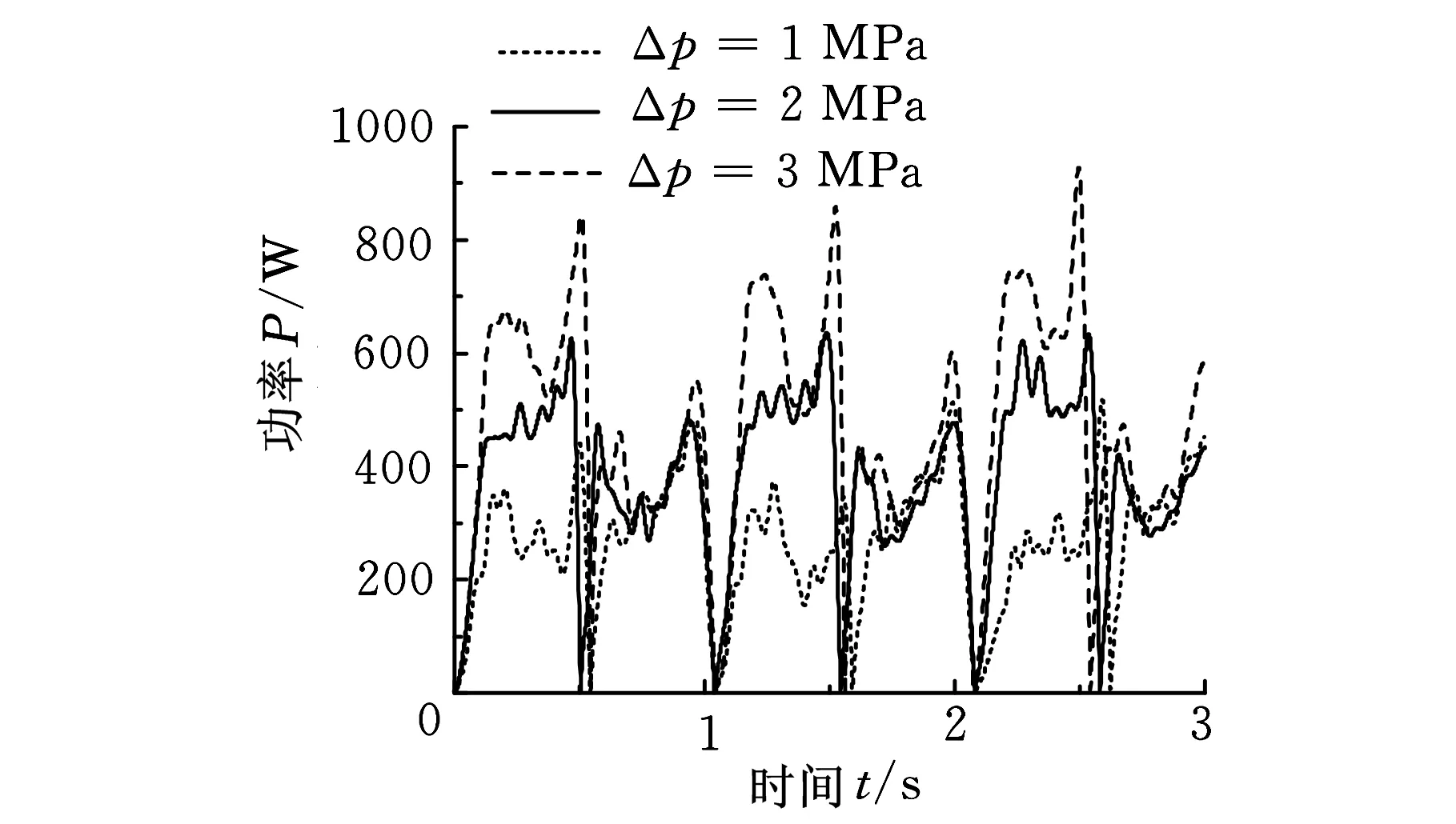
(b)回程缸油路節(jié)流損失功率

(c)主缸油路節(jié)流損失功率 圖7 Δp不同時(shí)泵閥復(fù)合控制系統(tǒng)功率實(shí)驗(yàn)曲線
上述壓差Δp對應(yīng)的活動橫梁位移實(shí)驗(yàn)曲線如圖8所示。可以看出,隨著Δp的增大,位移跟隨性變好;在Δp=1 MPa時(shí),活動橫梁的位移準(zhǔn)確性較差,壓下和回程均不能達(dá)到給定的位置,且相位滯后約0.2 s,不能滿足快鍛壓機(jī)位置精度要求;當(dāng)Δp=3 MPa時(shí),系統(tǒng)出現(xiàn)了超調(diào)現(xiàn)象,且活動橫梁振動明顯增強(qiáng),穩(wěn)定性變差;當(dāng)Δp=2 MPa時(shí),系統(tǒng)兼顧穩(wěn)定性和準(zhǔn)確性,快速性也較好。
綜合考慮系統(tǒng)的穩(wěn)定性、快速性、準(zhǔn)確性以及系統(tǒng)能耗,本文選取Δp=2 MPa進(jìn)行實(shí)驗(yàn)。泵閥復(fù)合控制系統(tǒng)各部分的功率實(shí)驗(yàn)曲線如圖9所示。可以看出,系統(tǒng)輸入功率曲線不再保持恒定,而是隨著壓機(jī)的上行/下行循環(huán)變化。
根據(jù)圖9曲線計(jì)算3s內(nèi)快鍛液壓機(jī)的能耗,如表3所示,可以看出,系統(tǒng)的溢流損失為零,雖然主缸油路和回程缸油路節(jié)流損失的能量占比依然很大,但其量值與負(fù)載消耗的能量愈加接近,負(fù)載消耗的能量達(dá)到系統(tǒng)輸入能量的31.9%,系統(tǒng)能量利用率是電液比例閥控系統(tǒng)的5倍多。
根據(jù)表2、表3的快鍛液壓機(jī)電液比例閥控系統(tǒng)與泵閥復(fù)合控制液壓系統(tǒng)的能耗對比,可以看出,在負(fù)載消耗有效能基本相同的實(shí)驗(yàn)條件下,相對于電液比例閥控系統(tǒng)來說,泵閥復(fù)合控制系統(tǒng)在主缸回路和回程缸回路節(jié)流損失的能量更小,加之系統(tǒng)的溢流損失為零,使得泵閥復(fù)合控制系統(tǒng)的裝機(jī)功率大幅度降低,泵閥復(fù)合控制系統(tǒng)的輸入能量僅為電液比例閥控系統(tǒng)輸入能量的18.4%,裝機(jī)功率下降的同時(shí),快鍛液壓機(jī)系統(tǒng)初投入成本也將大幅度降低。綜上所述,與電液比例閥控系統(tǒng)相比,快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)具有良好的節(jié)能性。

(a)Δp=1 MPa

(b)Δp=2 MPa

(c)Δp=3 MPa1.給定曲線 2.實(shí)際位移曲線圖8 不同Δp時(shí)快鍛壓機(jī)的位移實(shí)驗(yàn)曲線

(a)功率曲線
(b)一個(gè)周期內(nèi)功率曲線1.系統(tǒng)輸入功率曲線 2.溢流損失功率曲線 3.主缸油路節(jié)流損失功率曲線 4.回程缸油路節(jié)流損失功率曲線圖9 泵閥復(fù)合控制系統(tǒng)功率實(shí)驗(yàn)曲線

名稱W1W2W3W4W5能耗(kJ)1.301.001.7804.08能耗占系統(tǒng)輸入能量的比例(%)31.924.543.60100
4 結(jié)論
(1)提出了快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)原理,主要從能量源頭出發(fā)來降低系統(tǒng)的溢流損失和節(jié)流損失,同時(shí)分析了快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)位置-壓力雙閉環(huán)控制方法。
(2)理論上定性地分析了快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)的節(jié)能機(jī)理。分析結(jié)果表明,在快鍛液壓機(jī)整個(gè)工作行程內(nèi),泵閥復(fù)合控制系統(tǒng)相比電液比例控制系統(tǒng)具有更低的系統(tǒng)輸入功率。
(3)通過實(shí)驗(yàn)定量研究了快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)的節(jié)能效果。研究結(jié)果表明,相同工況下,快鍛液壓機(jī)泵閥復(fù)合控制系統(tǒng)的能量利用率達(dá)到31.9%,與電液比例閥控系統(tǒng)的5.5%相比提高了近5倍,同時(shí)泵閥復(fù)合控制系統(tǒng)的輸入功率僅為電液比例控制系統(tǒng)的18.4%,節(jié)能效果明顯。
[1]高俊峰.我國快鍛液壓機(jī)的發(fā)展與現(xiàn)狀[J].鍛壓技術(shù),2008,33(6):1-5.Gao Junfeng.Resent Status and Development of High-speed Forging Hydraulic Press in Our Country[J].Forging&Stamping Technology,2008,33(6):1-5.
[2]陳柏金,黃樹槐,靳龍,等.16MN快鍛液壓機(jī)控制系統(tǒng)研究[J].中國機(jī)械工程,2008,19(8):990-992.
Chen Baijin,Huang Shuhuai,Jin Long,et al.Development of the Control System for 16MN Fast Forging Hydraulic Press[J].China Mechanical Engineering,2008,19(8):990-992.
[3]艾超,孔祥東,劉勝凱,等. 泵控液壓機(jī)蓄能器快鍛回路控制特性影響因素研究[J]. 鍛壓技術(shù),2014,39(2):88-93.Ai Chao,Kong Xiangdong,Liu Shengkai,et al.Study on the Influence Factors of Control Charateristics of Accumulater Fast Forging Circuit for Pump-controlled Hydraulic Press[J].Forging & Stamping Technology,2014,39(2):88-93.
[4]竇雪川.22MN快鍛液壓機(jī)快鍛系統(tǒng)理論與實(shí)驗(yàn)研究[D].秦皇島:燕山大學(xué),2009.
[5]逄振旭,李從心,倪其民,等.快速鍛造液壓機(jī)的結(jié)構(gòu)與控制[J].上海交通大學(xué)學(xué)報(bào),2000(10):1399-1401.
Pang Zhenxu, Li Congxin, Ni Qimin,et al. Structure and Control of High Speed Forging Hydraulic Press[J].Journal of Shanghai Jiaotong University,2000(10):1399-1401.
[6]管成.液壓機(jī)的機(jī)械-液壓復(fù)合式節(jié)能液壓系統(tǒng)的研究及應(yīng)用[D].杭州:浙江大學(xué)工學(xué),2002.
[7]姚靜,孔祥東,權(quán)凌霄,等.采用蓄能器的快鍛液壓機(jī)建模仿真與試驗(yàn)研究[J]. 中國機(jī)械工程,2009,20(2):241-244.
Yao Jing,Kong Xiangdong,Quan Lingxiao,et al.Study on Modeling Simulation and Test of Fast Forging Hydraulic Press Using Accululator[J].China Mechanical Engineering,2009,20(2):241-244.
[8]Opdenbosch P,Sadegh N,Book W.Learning Control Applied to Electro-Hydraulic Poppet Valves[C].Proeeeding of IEEE Control Conference on Automation.Seattle,2008:1525-1532.
[9]徐兵,張斌,林建杰.變頻驅(qū)動液壓電梯系統(tǒng)能耗特性[J].機(jī)械工程學(xué)報(bào),2006,42(8):137-141.
Xu Bing,Zhang Bin,Lin Jianjie.Characteristics of Energy Consumption of Hydraulic Elevator System with Vriable Frequency Drive[J].Chinese Journel of Mechanical Engineering,2006,42(8):137-141.
[10]Xu Bing,Liu Yingjie.Simulation Study of the Novel Valve Arrangement Used in Hydraulic Control System[C]//The Sixth International Fluid Power Conference.Dresden,2008:139-146.
(編輯王旻玥)
Study on Energy Saving Characteristics of Valve and Pump Compound Control System of Fast Forging Hydraulic Press
Zhai Fugang1Li Xuebing2Yao Jing1,2Zhou Fang2Kong Xiangdong1,2
1.Key Laboratory of Advanced Forging & Stamping Technology and Science (Yanshan University),Ministry of Education of China,Qinhuangdao,Hebei,066004 2.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control, Yanshan University, Qinhuangdao,Hebei,066004
Considering the energy source of fast forging hydraulic press,a kind of valve and pump compound control system on fast forging hydraulic press was proposed to reduce the overflow loss and pressure loss of the system.The energy-saving mechanism of valve and pump compound control system was qualitatively analyzed theoretically,and the system energy consumption was quantitatively studied by experiments.The experimental results show that energy utilization rate of valve and pump compound control system reaches 31.9%,and improves nearly 5 times compared with electro-hydraulic proportional valve control system.At the same time,the input power of valve and pump compound control system is only 18.4% of the proportional valve control system.The study results have important significance to improve energy utilization and reduce the energy consumption of the fast forging hydraulic press.
fast forging hydraulic press;valve and pump compound control;energy utilization rate;energy saving
2015-04-04
河北省自然科學(xué)基金青年科學(xué)基金資助項(xiàng)目(E2014203247);燕山大學(xué)重型機(jī)械協(xié)同創(chuàng)新計(jì)劃課題(ZX01-20140400-01);燕山大學(xué)青年教師自主研究計(jì)劃課題(14LGA006)
TH137.7DOI:10.3969/j.issn.1004-132X.2015.16.005
翟富剛,男,1979年生。燕山大學(xué)機(jī)械工程學(xué)院講師。主要研究方向?yàn)闄C(jī)電液一體化。發(fā)表論文10余篇。李雪冰,男,1991年生。燕山大學(xué)機(jī)械工程學(xué)院碩士研究生。姚靜(通信作者),女,1978年生。燕山大學(xué)機(jī)械工程學(xué)院副教授。周芳,女,1990年生。燕山大學(xué)機(jī)械工程學(xué)院碩士研究生。孔祥東,男,1959年生。燕山大學(xué)機(jī)械工程學(xué)院教授、博士研究生導(dǎo)師,燕山大學(xué)副校長。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
