蛇形機器人的研究與發(fā)展綜述
2015-10-29 03:05:20張雙彪李興城
中國機械工程 2015年3期
蘇 中 張雙彪 李興城
1.北京信息科技大學(xué),北京,100101 2.北京理工大學(xué),北京,100081
蛇形機器人的研究與發(fā)展綜述
蘇中1,2張雙彪2李興城2
1.北京信息科技大學(xué),北京,1001012.北京理工大學(xué),北京,100081
對國內(nèi)外蛇形機器人進行了研究和分析,將其分為形態(tài)研究、運動學(xué)和動力學(xué)模型、步態(tài)控制及穩(wěn)定性等研究內(nèi)容,從二維運動和三維運動角度,對研究內(nèi)容進行了綜述、分析和總結(jié)。結(jié)合蛇形機器人的結(jié)構(gòu)和運動步態(tài)特點,對國內(nèi)外研制的蛇形機器人進行了分類,最后對蛇形機器人的研究發(fā)展進行了展望。
運動步態(tài);運動學(xué);動力學(xué);控制方法;穩(wěn)定性
0 引言
隨著科技的不斷發(fā)展,蛇形機器人作為新型可移動的柔性機器人,以其具有多步態(tài)運動能力,且能夠適應(yīng)復(fù)雜多變的環(huán)境的特點,成為機器人領(lǐng)域的一個研究熱點。特別地,蛇形機器人的易于偽裝、隱蔽性高、結(jié)構(gòu)緊密和高集成化等特點,使其能夠滿足偵察、巡邏等軍事需求,并且可通過空中投放到敵方陣地,利用自身攜帶的圖像采集設(shè)備,完成偵察任務(wù)。未來的蛇形機器人還可裝備一定的彈藥,完成攻擊或自爆等任務(wù)。
除軍事應(yīng)用外,蛇形機器人還具有較廣的民用前景,如地震和火災(zāi)現(xiàn)場搜救、井下毒體檢測、管道檢測、核電站輻射檢查、橋墩侵蝕檢查等,在人員不便進入或難于進入的高危險領(lǐng)域,均可利用低成本的蛇形機器人代替操作人員,妥善地完成指派任務(wù)。結(jié)合這些優(yōu)點和用途,近年來對于蛇形機器人的研究,得到國內(nèi)外學(xué)者的廣泛關(guān)注。
本文首先介紹生物蛇的基本步態(tài),然后有針對性地研究了國內(nèi)外蛇形機器人的研究成果,從形態(tài)研究、運動學(xué)模型和動力學(xué)模型、步態(tài)控制及穩(wěn)定性分析等方面對理論研究進行綜述,對已研制的蛇形機器人進行分類,并且對其研究現(xiàn)狀和問題點進行分析,最后對蛇形機器人研究進行總結(jié)和展望。
1 生物蛇的運動形式
對于生物蛇的研究,最早起源于1946年,Gray[1]通過研究自然界的生物蛇,將其基本運動步態(tài)分為蜿蜒運動、直線運動、鼓風(fēng)琴運動和側(cè)移運動。蜿蜒運動(serpentine movement)是以側(cè)向波傳播為特征的運動步態(tài),隨著側(cè)向波的傳遞,身體向前移動,此種步態(tài)被認為是生物蛇一種具有高效率的運動步態(tài),適合地形平坦的環(huán)境。直線運動(rectilinear movement)是生物蛇通過肋骨、肌肉的交替運動,使身體向前爬行,此種方式與毛蟲所采用爬行相似,其運動效率很低,常與其他步態(tài)聯(lián)合使用,適用于狹窄區(qū)域。鼓風(fēng)琴運動(concertina movement),表面看來與蜿蜒運動相似,但其通過自身向前牽引,使身體向前爬行,通常生物蛇在樹上爬行時采用此種步態(tài)。側(cè)移運動(sidewinding movement)具有螺線形特征,可使身體橫向或斜向運動,最典型的是生活在沙漠中響尾蛇的運動步態(tài)(也稱作螺旋步態(tài)[2]),此步態(tài)使生物蛇具有更強的適應(yīng)性。此外,生物蛇在沿樹、桿等物體向上攀爬時采用的步態(tài),也具有螺旋線特征,它是依靠螺旋內(nèi)測與物體之間的摩擦力穩(wěn)定身體,利用類似于彈簧伸縮功能,促進自身向上(前)運動。
2 蛇形機器人的理論研究狀況
基于Gray對生物蛇運動步態(tài)產(chǎn)生機理的研究,在20世紀70年代,東京工業(yè)大學(xué)率先開始研究仿生蛇的運動步態(tài),從此開啟了智能機器人領(lǐng)域的又一扇大門——蛇形機器人。隨后美國、挪威、中國等多個國家的研究者們紛紛加入到蛇形機器人的科研行列,逐漸開展由淺入深的研究。
蛇形機器人的理論研究是工程實驗研究之基礎(chǔ),綜合國內(nèi)外對于蛇形機器人的研究成果,主要包括形態(tài)研究、運動學(xué)和動力學(xué)模型、步態(tài)控制及穩(wěn)定性分析三大塊內(nèi)容。
2.1形態(tài)研究
經(jīng)歷了自然法則優(yōu)勝劣汰的選擇,生物蛇所具有的運動步態(tài)是無足脊椎動物行走步態(tài)的典范。國內(nèi)外學(xué)者通常將擬定的形態(tài)曲線作為理想的運動曲線,控制蛇形機器人的運動曲線向理想形態(tài)曲線逼近,逼近的形態(tài)曲線越流暢自然,越貼近實際,仿生爬行效率越高。在研究蛇形機器人運動步態(tài)時,采用不同的形態(tài)曲線具有不盡相同的爬行效果。為建立合理的運動形態(tài),國內(nèi)外展開了研究,并取得了一些成果。
蜿蜒運動是目前國內(nèi)外研究最多的一種二維步態(tài),所具有的側(cè)向波傳遞過程,與正弦曲線變化相似,相位和波動幅值隨著時間發(fā)生變換。Clothoid曲線是通過對兩個具有半周期的Cornu螺旋線聯(lián)合而成的,可作為蜿蜒運動逼近,但兩個螺旋線在連接點處并不連續(xù),存在奇異點問題[3]。Hirose[3]通過對生物蛇運動的實驗和觀察,提出了用于逼近蜿蜒運動的Serpenoid曲線,并與正弦曲線和Clothoid曲線進行實驗對比及分析,結(jié)果顯示Serpenoid曲線具有較好的模擬效果。Ma[4]提出了Serpentine曲線,從運動效率角度證明了該曲線比Serpenoid曲線具有更好的模擬效果。
當(dāng)生物蛇沿桿向上攀爬或側(cè)移運動時,運動形態(tài)體現(xiàn)為三維螺旋曲線,為準確描述該曲線, Yamada等[5]采用Frenet-Serret方程,建立運動外形的三維曲線模型,Burdick等[6]通過分析側(cè)移運動過程,將蛇體結(jié)構(gòu)分為地面接觸部分和拱形部分,采用分段形式建立三維運動曲線,孫洪等[7]針對無輪結(jié)構(gòu)的蛇形機器人,建立了基于螺旋角的等距螺旋曲線,以上方法均具有較好的逼近效果。
2.2運動學(xué)模型和動力學(xué)模型
運動學(xué)模型和動力學(xué)模型是蛇形機器人的控制基礎(chǔ)。基于前人對生物蛇形態(tài)曲線的初步探索,為深入研究蛇形機器人步態(tài),運動學(xué)模型和動力學(xué)模型成為該領(lǐng)域的研究重點。根據(jù)蛇形機器人的運動步態(tài)特點,可以將運動學(xué)模型和動力學(xué)模型分為二維步態(tài)和三維步態(tài)兩種。
2.2.1二維步態(tài)
蛇形機器人的二維步態(tài)主要指的是蜿蜒、內(nèi)攀爬和蠕動(也稱行波步態(tài))。蜿蜒步態(tài)與生物蛇的蜿蜒運動相同,蠕動步態(tài)猶如尺蠖蠕動,但其效率很低,內(nèi)攀爬步態(tài)類似于鼓風(fēng)琴運動,但是利用機器人兩個外側(cè)表面與外界的接觸摩擦力,及自身部分向前運動。
蜿蜒運動作為具有高效率的運動步態(tài),成為學(xué)者們對二維步態(tài)的主要研究對象。Hirose[3]對生物蛇運動過程進行了觀察和骨骼解剖分析,建立了連桿機構(gòu)作為蜿蜒步態(tài)的運動學(xué)模型,以及平面和坡面地形條件下動力學(xué)模型,從數(shù)學(xué)角度得出蜿蜒運動的產(chǎn)生條件為摩擦力存在各向異性,并且發(fā)現(xiàn)生物蛇在爬行時,位于蜿蜒曲線兩側(cè)波峰處的腹部會向上抬起,將此運動稱作Sinus-lifting。隨著對Sinus-lifting運動研究的不斷深入,Yamada等[8]提出了弧形結(jié)構(gòu)的蛇形關(guān)節(jié),通過仿真和實驗進行初步驗證。Hu等[9]建立了切向和法向的摩擦力模型,并在不同角度的坡度下,對生物蛇進行了爬行實驗,進一步證明了蜿蜒運動的產(chǎn)生條件。Kelly等[10]、Ostrowski等[11]針對裝有三個從動輪的連桿型蛇形機器人,利用拉格朗日法建立了蜿蜒動力學(xué)模型,并進行了可控制性分析。Nilsson[12]通過對動力學(xué)模型的理論推導(dǎo),得出即使在各向同性的摩擦力作用下,仍存在效率低的蜿蜒運動的結(jié)論。Shapiro等[13]在Walton的摩擦力模型基礎(chǔ)上,建立了蛇形機器人內(nèi)攀爬方式的摩擦力表達式,在常規(guī)、線性和非線性三種摩擦力情況下,研究法向摩擦力和切向摩擦力的特性。為提高蛇形機器人對外界復(fù)雜環(huán)境的適應(yīng)性,Liljeback等[14]分析了機器人自身與障礙物之間的位置關(guān)系,提出了平面運動的障礙輔助運動步態(tài),建立了蛇形機器人的動力學(xué)模型。Rincon等[15]通過對四連桿蛇形機器人的蠕動步態(tài)分析,建立了運動學(xué)模型和動力學(xué)模型。
國內(nèi)對蛇形機器人二維步態(tài)的研究也取得了一些成果。Ma等[16]建立坡面地形條件下的運動學(xué)模型、動力學(xué)模型,研究了坡面角度與摩擦力之間的關(guān)系,通過對無側(cè)滑條件下的運動步態(tài)進行仿真,確定了步態(tài)實現(xiàn)的優(yōu)化參數(shù)。李斌等[17]提出了基于樂理的步態(tài)控制方法,通過定義樂理符號、規(guī)則等,實現(xiàn)了蛇形機器人蜿蜒運動控制。張佳帆等[18]通過對生物蛇蠕動步態(tài)分析,建立了蠕動步態(tài)的運動學(xué)模型。孫洪等[19]受蜿蜒運動的啟發(fā),在分析了蠕動步態(tài)的波形傳播機理基礎(chǔ)上,將Serpenoid曲線作為蠕動的驅(qū)動函數(shù),并通過實驗驗證了可行性。
2.2.2三維步態(tài)
蛇形機器人的三維步態(tài)包括側(cè)移步態(tài)和攀爬步態(tài),兩種步態(tài)與生物蛇的運動相同,并且均具有螺旋曲線的特點。
Chirikjian[20]從幾何角度定義了兩個螺旋線方向角,通過建立單位弧長的表達式,進而建立了全長度的螺旋側(cè)移運動的運動學(xué)模型,并通過計算機對側(cè)移和轉(zhuǎn)彎進行定性仿真。
Hatton等[21]分析了螺旋側(cè)移運動的特點,認為在坡面地形條件下,生物蛇的側(cè)移運動曲線為橢圓螺旋曲線,建立了身體和地面接觸點與橢圓之間的幾何關(guān)系式。Gong等[22]基于前人的研究基礎(chǔ),提出了利用側(cè)移運動的錐形螺旋曲線,實現(xiàn)蛇形機器人繞固定點側(cè)移轉(zhuǎn)彎的方法。
為了讓蛇形機器人運動曲線平滑,Yamada等[5,8]提出了弧形連桿結(jié)構(gòu),基于Frenet-Serret方程,建立了弧形結(jié)構(gòu)的三維模型,針對Sinus lifting運動進行仿真和實驗驗證,結(jié)果表明運動曲線平滑。
國內(nèi)對三維步態(tài)的動力學(xué)模型研究很少,孫洪[23]在研究攀爬型蛇形機器人時,提出三連桿蠕動方式,在理想情況下,建立了攀爬的數(shù)學(xué)模型。
二維運動學(xué)和動力學(xué)模型的研究成果很多,為三維步態(tài)的研究鋪墊了理論基礎(chǔ)。根據(jù)蛇形機器人的實際工作環(huán)境的復(fù)雜性,三維步態(tài)的運動學(xué)模型和動力學(xué)模型需要進一步研究。
2.3蛇形機器人的步態(tài)控制及穩(wěn)定性分析
對蛇形機器人的步態(tài)控制分為二維步態(tài)控制和三維步態(tài)控制。目前的研究成果主要著重于二維步態(tài)控制,通常情況下,采用開環(huán)控制即可實現(xiàn)蛇形機器人的步態(tài)運動,而為控制蛇形機器人運動智能地、高效率地運動,需要研究閉環(huán)的控制系統(tǒng)實現(xiàn)步態(tài)控制。
目前,關(guān)于蛇形機器人控制方法的研究很多,都是基于動力學(xué)模型,建立每個關(guān)節(jié)角數(shù)學(xué)關(guān)系式,從而設(shè)計步態(tài)控制器。Date等[24]在側(cè)滑約束力的條件下,根據(jù)蛇形機器人頭部速度,設(shè)計頭部跟蹤已規(guī)劃路徑的跟蹤率,實現(xiàn)了對機器人的路徑控制。Prautsch等[25]提出蜿蜒運動的速度控制方法,通過李亞普諾夫方程得到控制方程,以控制輸入量的大小衡量系統(tǒng)能量消耗水平,得出了約束為功耗最小時,蜿蜒運動的速度控制參數(shù)。為避免蛇形機器人的直線狀態(tài)的奇異情況,Matsuno等[26]分別設(shè)計了動態(tài)操縱性和約束力的價值函數(shù),通過控制身體形狀來滿足價值函數(shù)。Li等[27]建立了蛇形機器人的動力學(xué)模型,采用被動控制方法設(shè)計了控制器,并用李亞普諾夫理論驗證了系統(tǒng)的穩(wěn)定性。為解決關(guān)節(jié)受外界環(huán)境阻礙,而導(dǎo)致蛇形機器人無法運動的問題,Liljeback等[14]建立接觸力和相對角的關(guān)系,設(shè)計了關(guān)節(jié)相對角的比例-微分控制器,該控制器通過對機器人的接觸力的測量,調(diào)整關(guān)節(jié)相對角,實現(xiàn)障礙輔助自適應(yīng)的前進步態(tài),同時利用非線性理論分析了二維步態(tài)控制系統(tǒng),得出蛇形機器人漸進穩(wěn)定到平衡點的控制率是時變的,并且當(dāng)與地面的摩擦力為各向同性時,系統(tǒng)不可控,當(dāng)為各項異性時,系統(tǒng)為強可達到的結(jié)論。他們還建立了路徑跟蹤控制器,利用龐加萊映射分析了該控制器的穩(wěn)定性[28]。
國內(nèi)從事蛇形機器人的科研單位在控制方法上也取得了一些成果。為實現(xiàn)輪式蛇形機器人的蜿蜒運動,Ma等[29]以輪高、頭部的方向角和頭部的高度作為狀態(tài)變量,將各關(guān)節(jié)的相對轉(zhuǎn)角作為控制量,設(shè)計閉環(huán)控制回路,仿真結(jié)果顯示,在蜿蜒曲線控制的同時,頭部位置和方向均得到較好的控制效果。陳麗等[30]針對三維側(cè)向運動看作水平方向和垂直方向蜿蜒運動的復(fù)合,建立了空間運動方程。為研究蛇形機器人纜索攀爬步態(tài),魏武等[31]采用迭代鏈擬合方法和關(guān)鍵幀提取的聯(lián)合方法,對蛇體曲線進行擬合并生成運動步態(tài)。盧振利等[32-34]通過分析神經(jīng)元模型的特性,提出采用循環(huán)抑制的中樞模式發(fā)生器(CPG),控制蛇形機器人的二維和三維步態(tài),以及實現(xiàn)步態(tài)轉(zhuǎn)換,又提出層次化聯(lián)結(jié)CPG模型,控制機器人的三維步態(tài),該方法不完全依賴動力學(xué)模型,可根據(jù)控制器的輸出規(guī)律,實現(xiàn)對機器人關(guān)節(jié)的轉(zhuǎn)角控制,從而實現(xiàn)蜿蜒運動。王智鋒等[35]從能量傳遞的角度,提出了被動蜿蜒控制方法,該方法能夠讓蛇形機器人不主動測量環(huán)境信息,依靠自身能量狀態(tài)被動地適應(yīng)環(huán)境。Wu等[36]通過分析單向連接的CPG模型,提出了反饋式CPG模型,初步分析了CPG參數(shù)對蜿蜒運動的影響,從仿真和實驗兩方面驗證了步態(tài)控制的反饋式CPG模型。
3 蛇形機器人的本體研究狀況
幾十年來,經(jīng)過國內(nèi)外學(xué)者們的不懈努力,對蛇形機器人的研究成果不但體現(xiàn)在理論上,而且本體樣機的研制上,也結(jié)出了可喜碩果,國內(nèi)外涌現(xiàn)出不同種類、不同功能的蛇形機器人。
3.1國外蛇形機器人
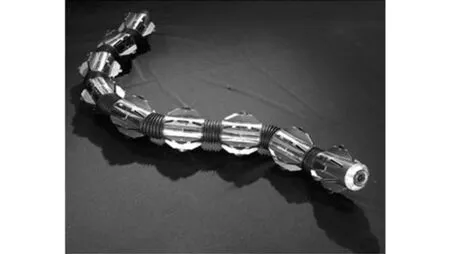
圖1 ACM-R5
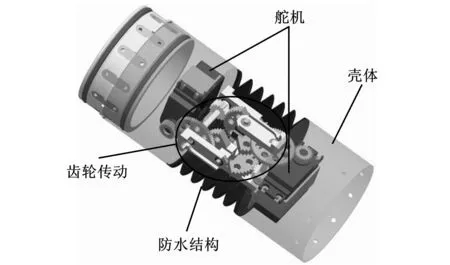
圖2 ACM-R5的關(guān)節(jié)內(nèi)部結(jié)構(gòu)
Hirose[3]提出了Active Cord Mechanism蛇形機器人,其率領(lǐng)的科研團隊于1972年研制出世界上第一架命名為ACM 的蛇形機器人,隨著研究的深入,先后研制出具有代表性的ACM-Ⅲ、ACM-R2、ACM-R3和ACM-R4等陸地蛇形機器人,這些機器人已經(jīng)從簡單的二維運動,發(fā)展到了適應(yīng)凹凸不平的崎嶇地面。為滿足水下探測需要,該團隊又研發(fā)了名為ACM-R5的水陸兩棲蛇形機器人,如圖1所示。該機器人的關(guān)節(jié)設(shè)計了一對驅(qū)動伺服電機,通過齒輪系傳動,可實現(xiàn)俯仰和偏航運動,如圖2所示。在每個節(jié)軀干單元的外側(cè),每隔60°安裝一個帶有小從動輪的葉片,這樣,在關(guān)節(jié)進行防水處理后,ACM-R5既可實現(xiàn)陸上的蜿蜒、翻滾和側(cè)向運動,又可實現(xiàn)水下的自由游動,并且其游動速度不少于0.9 m/min。在機器人的頭部裝有一部攝像頭,憑借自身的無限傳輸功能,可以將攝像頭采集到的數(shù)據(jù)傳輸給上位機,以便進行數(shù)據(jù)處理[3,37-39]。該蛇形機器人可通過尾部的電源接口實現(xiàn)有線供電,當(dāng)進行水下作業(yè)時,也可通過自身攜帶的聚合物鋰電池進行自主供電。
德國國家信息技術(shù)研究中心于20世紀末,先后研制出GMD-Snake和GMD-Snake2,如圖3和圖4所示。GMD-Snake頭部帶有用于探測障礙物的壓力傳感器和照明用的LED燈,各個關(guān)節(jié)裝有檢測角度的彈簧觸點裝置,以及用于控制水平和垂直方向的驅(qū)動電機,該機器人能夠完成平地爬行和越障爬行[40]。

圖3 GMD-Snake
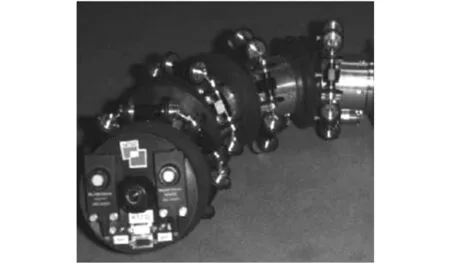
圖4 GMD-Snake2
基于GMD-Snake功能和結(jié)構(gòu)的研究,GMD-Snake2的頭部裝有一個用于圖像識別的攝像頭,每節(jié)軀干單元的殼體都由圓柱形鋁材構(gòu)成,其關(guān)節(jié)與GMD-Snake相同,通過兩個電機連接而成的萬向節(jié)實現(xiàn),如圖5所示。在殼體外側(cè)每隔60°安裝一對小從動輪,殼體內(nèi)部裝有感知運動狀態(tài)的加速度傳感器,以及用于測量距離的機械-光學(xué)傳感器。與GMD-Snake相同,需要外部提供24V電源[41]。
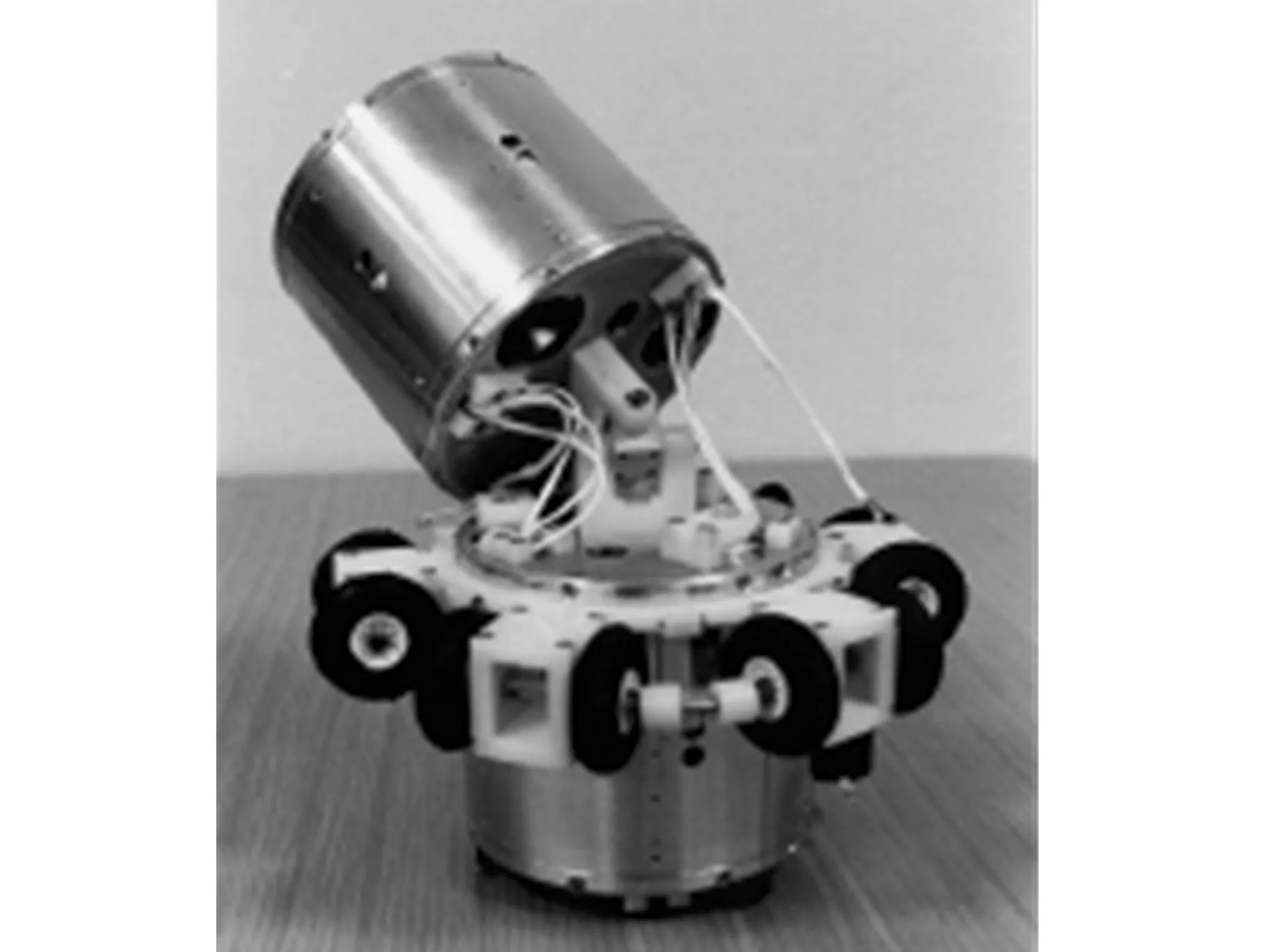
圖5 GMD-Snake關(guān)節(jié)

圖6 OmniTread 蛇形機器人結(jié)構(gòu)
美國密歇根大學(xué)研制的OmniTread OT-4和OmniTread OT-8蛇形機器人具有獨特的結(jié)構(gòu),如圖6所示,該系列機器人由7節(jié)軀干單元組成,每個單元具有各自的作用。單元1為有效載荷單元,單元2和單元6為空氣壓縮器,單元3和單元5為能源單元,單元4為驅(qū)動單元。在每個軀干單元外與地面接觸的平面上分別裝有一對履帶,以保證機器人發(fā)生機體翻時仍具有足夠的爬行能力。軀干單元之間設(shè)計了氣動二自由度的關(guān)節(jié),利用氣動驅(qū)動關(guān)節(jié)可實現(xiàn)OmniTread機器人的俯仰和偏航運動。
OmniTread蛇形機器人利用兩塊并聯(lián)的7.4 V、730 mA·h的聚合物鋰電池作為驅(qū)動電源,安裝在驅(qū)動電機兩側(cè)。OmniTread OT-8與OmniTread OT-4不同之處在于可實現(xiàn)無線操控,可通過直徑為23.32 cm(8 inch)的管道,而OmniTread OT-4需要有線操控,僅能通過直徑為11.16 cm(4 inch)通道。在脊柱結(jié)構(gòu)內(nèi)OmniTread機器人具有很強的翻越能力,能夠適應(yīng)叢林、戈壁、管道等崎嶇環(huán)境,爬行速度可達到0.9 m/min[42]。
美國Gavin Miller帶領(lǐng)團隊研制了S系列的蛇形機器人,其中,S5蛇形機器人具有極高的仿生效果,如圖7所示。該機器人由64個伺服電機和8個伺服控制軀干單元組成,每個單元的內(nèi)部結(jié)構(gòu)如圖8所示,可見該結(jié)構(gòu)僅能進行偏航運動。此外,S5自身攜帶的42塊聚合物鋰電池完成供電。由于S5的軀干關(guān)節(jié)數(shù)量大、長徑比小,所以平面蜿蜒運動具有極高的仿生效果。

圖7 蛇形機器人S5
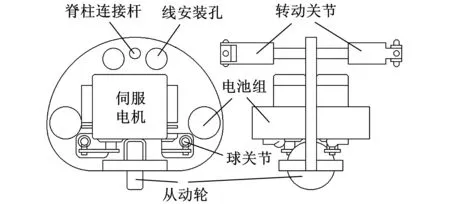
圖8 S5蛇形機器人的軀干單元結(jié)構(gòu)簡圖
為實現(xiàn)距離檢測、運動測量、圖像采集、轉(zhuǎn)動等功能,Gavin Miller對最新款的S7蛇形機器人集成了多種傳感器,如圖9所示[43]。
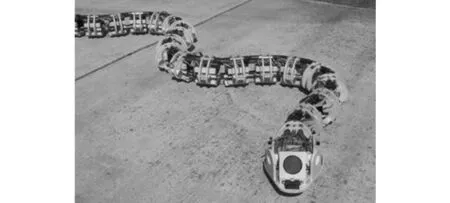
圖9 蛇形機器人S7
美國卡耐基梅隆大學(xué)主要研究用于攀爬的模塊化蛇形機器人,具有代表性的蛇形機器人為Uncle Sam,如圖10所示。該機器人研制考慮了尺寸、功耗和速度等因素對步態(tài)控制的影響,機身全長為94 cm,直徑為5.1 cm。圖11為模塊的示意圖。每個模塊裝有一個伺服電機,通過減速結(jié)構(gòu)實現(xiàn)驅(qū)動桿的動力輸出,并且驅(qū)動桿與連接桿正交設(shè)計,將兩個模塊進行連接后,水平方向的驅(qū)動桿可實現(xiàn)偏航運動,鉛垂方向的驅(qū)動桿可實現(xiàn)偏航運動。

圖10 蛇形機器人Uncle Sam
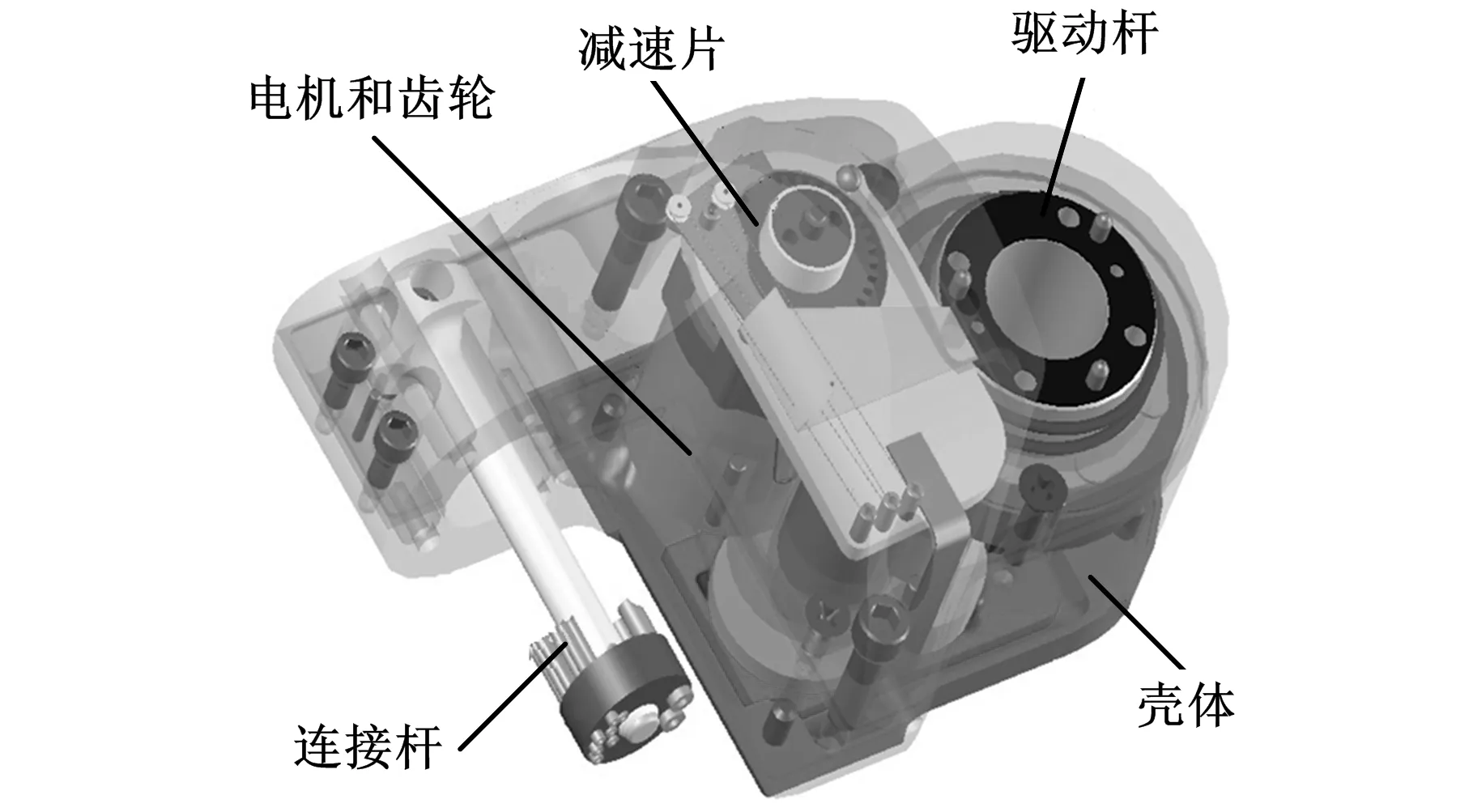
圖11 單模塊的結(jié)構(gòu)示意圖
卡耐基梅隆大學(xué)模塊化蛇形機器人采用螺旋步態(tài)實現(xiàn)向前爬行,具有很強的翻越能力,根據(jù)攀爬方式不同,分為內(nèi)攀爬式和外攀爬式兩種,二者均以自身和外部環(huán)境的摩擦作為力學(xué)約束條件,通過身體的運動,實現(xiàn)沿壁或桿(柱)體爬行,適用于空間狹窄的管道、墻壁狹縫、桿(柱)體等環(huán)境爬行。該機器人結(jié)構(gòu)節(jié)湊運動靈活的特點,需要有線控制和外接電源[44-45]。
卡內(nèi)基梅隆大學(xué)協(xié)助研發(fā)了一種鉑硅復(fù)合的皮膚,既能保護機器人機構(gòu),還能適應(yīng)濕地、沙地、灌木叢等環(huán)境,進而研制了一種具有皮膚驅(qū)動能力的蛇形機器人(TSDS),通過控制皮膚向后運動,實現(xiàn)身體向前運動,如圖12所示[46]。

圖12 皮膚驅(qū)動的蛇形機器人TSDS
挪威科技大學(xué)研發(fā)了用于火災(zāi)撲救的蛇形機器人Anna Konda,其體型較大,軀干采用金屬材料加工,具有20個液壓馬達,身長為3 m,總質(zhì)量為75 kg。該機器人頭部帶有兩個滅火劑噴嘴,當(dāng)火災(zāi)發(fā)生時,可對準火源進行撲救,如圖13所示[47-48]。
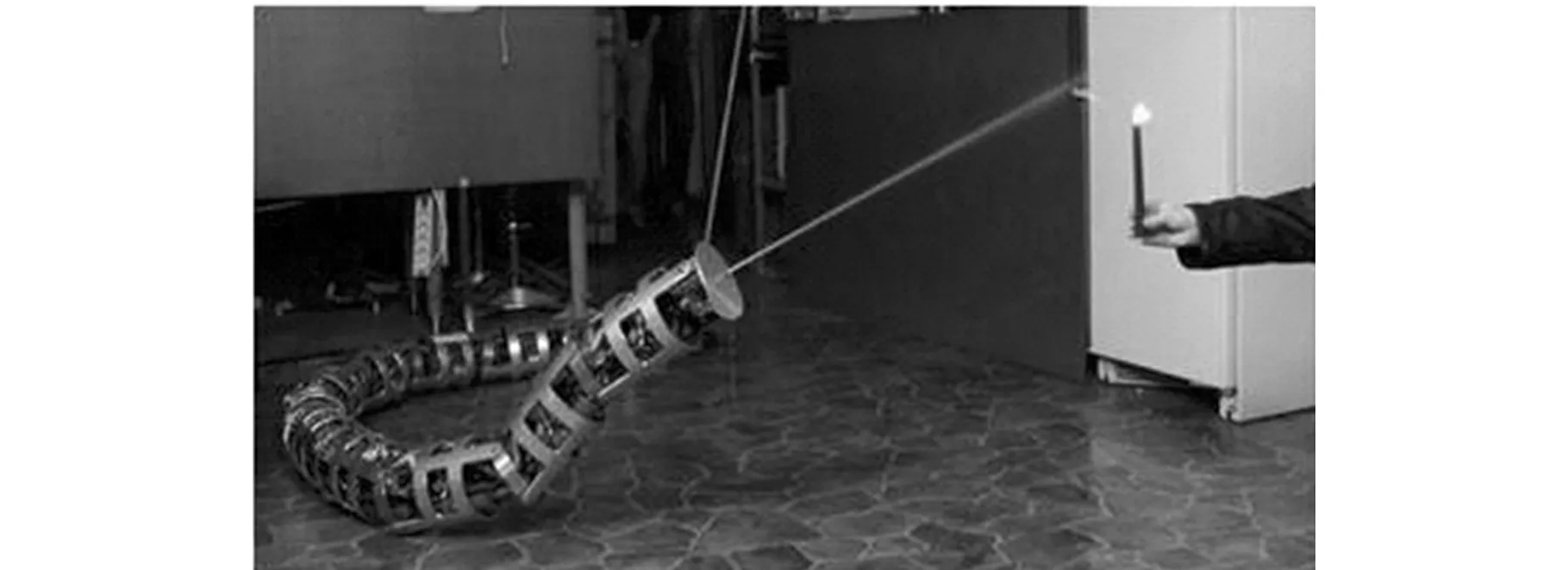
圖13 蛇形機器人Anna Konda
為深入研究障礙輔助運動步態(tài),挪威科技大學(xué)又研制了名為Aiko和Kullo的蛇形機器人,如圖14、圖15所示,盡管二者為無輪式的蛇形機器人,但均可實現(xiàn)多步態(tài)運動[49-50]。Aiko身長1.5 m,總質(zhì)量7 kg,采用直流電機驅(qū)動,需外接電源供電,未攜帶任何傳感器。

圖14 蛇形機器人Aiko

圖15 蛇形機器人Kullo
而對于由10節(jié)軀干單元組成的Kullo,每個的單元均裝有壓力傳感器,可感知機器人自身與外界的作用力。Kullo的軀干單元具有光滑的球型外殼,包裹著一個環(huán)形和兩個半環(huán)形的金屬框架,通過兩個輸出軸為正交安裝的伺服電機,以及齒輪系的傳動裝置,可實現(xiàn)水平方向的框架發(fā)生俯仰,鉛垂方向的框架發(fā)生偏航運動,軀干單元的示意圖如圖16所示。
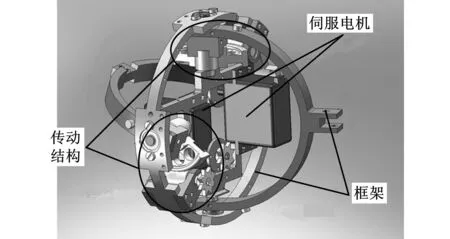
圖16 Kullo軀干單元的結(jié)構(gòu)示意圖
3.2國內(nèi)蛇形機器人
我國對蛇形機器人本體的研制稍晚于國外,但研發(fā)腳步逐漸趕上國外發(fā)展水平,近年來也取得了可喜成果。
中國科學(xué)院沈陽自動化研究所以馬書根為核心的機器人研發(fā)團隊,通過與日本合作,共同研制出具有代表性的蛇形機器人巡視者Ⅱ和探查者Ⅲ,如圖17和圖18所示。

圖17 巡視者Ⅱ

圖18 探查者Ⅲ
巡視者Ⅱ由金屬材質(zhì)的軀干單元組成,全長約1.2 m,總質(zhì)量8 kg,單元間通過特有的萬向節(jié)鏈接,能夠?qū)崿F(xiàn)俯仰、偏航和滾轉(zhuǎn)三軸轉(zhuǎn)動,每節(jié)軀干單元周圍裝有“體輪”,可減小運動阻力,提高運動效率,其頭部裝有視覺傳感器和GPS系統(tǒng),用來輔助運動控制。此外,該機器人可自身攜帶電源,以及實現(xiàn)無線操控[51]。
基于對巡視者Ⅱ的研究,探查者Ⅲ可實現(xiàn)水陸兩棲復(fù)雜環(huán)境的運動,共由9節(jié)軀干單元組成,總長1.17 m,總質(zhì)量6.75 kg。為適應(yīng)水下環(huán)境,在軀干單元的徑向,每間隔45°安裝一個帶有從動輪的漿,而取代了“體輪”,并且在單元之間增加了防水密封裝置。單元內(nèi)采用兩個伺服電機驅(qū)動,通過齒輪系傳動實現(xiàn)俯仰和偏航運動,單元結(jié)構(gòu)如圖19所示,當(dāng)左右齒輪同向運動時,發(fā)生俯仰運動,當(dāng)左右齒輪發(fā)生相反方向運動時,發(fā)生偏航運動[52]。

圖19 探查者Ⅲ的單元結(jié)構(gòu)
上海交通大學(xué)研制的適合于攀爬的CSR機器人,全長約1.5 m,總質(zhì)量約2.7 kg,由15個具有俯仰和滾轉(zhuǎn)功能的軀干單元組成,外面包裹一層增大接觸力的膠帶,如圖20所示[53]。

圖20 蛇形機器人CRS
與其他類型機器人不同,該機器人的軀干單元兩端可實現(xiàn)繞徑向轉(zhuǎn)動,中間可繞軸向轉(zhuǎn)動,改變徑向轉(zhuǎn)動的角度,從而實現(xiàn)機器人能繞柱體攀爬,如圖21所示。

圖21 蛇形機器人CRS的軀干單元
國防科技大學(xué)研制的蛇形機器人(簡稱NUDT SR),總長1.2 m,總質(zhì)量1.8 kg,可實現(xiàn)蜿蜒運動,最大前進速度可達20 m/min,其頭部帶有視頻采集裝置,如圖22所示[54],然而目前關(guān)于該機器人的資料很少。
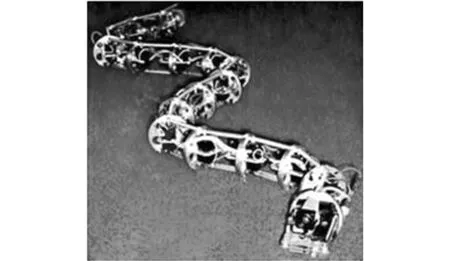
圖22 國防科技大學(xué)的蛇形機器人
北京信息科技大學(xué)正在研制一種新型的蛇形機器人“中國龍”(圖23),全長約1.2 m,總質(zhì)量約2.6 kg。該機器人9個軀干單元構(gòu)成,以及頭、尾關(guān)節(jié),其中一節(jié)為分體單元。軀干單元內(nèi)部裝控制系統(tǒng)和聚合物鋰電池組,而分體單元內(nèi)部裝有一個伺服電機。單元之間通過伺服電機連接,水平安裝的電機實現(xiàn)俯仰運動,鉛垂方向的電機實現(xiàn)偏航轉(zhuǎn)動。軀干單元間隔裝有一對從動輪,從動輪與單元之間通過伺服電機連接,實現(xiàn)自身變形,結(jié)構(gòu)簡圖如圖24所示。

圖23 蛇形機器人“中國龍”

圖24 “中國龍”的軀干單元和分體單元
“中國龍”機器人不但具有多種運動步態(tài),而且能夠利用自身穿戴帶有溫濕度、氣體、壓力等傳感器的全織物皮膚,感知外界環(huán)境變化,并能采用分體、變形方式調(diào)整自身參數(shù),以適應(yīng)復(fù)雜惡劣的環(huán)境,如圖25所示。
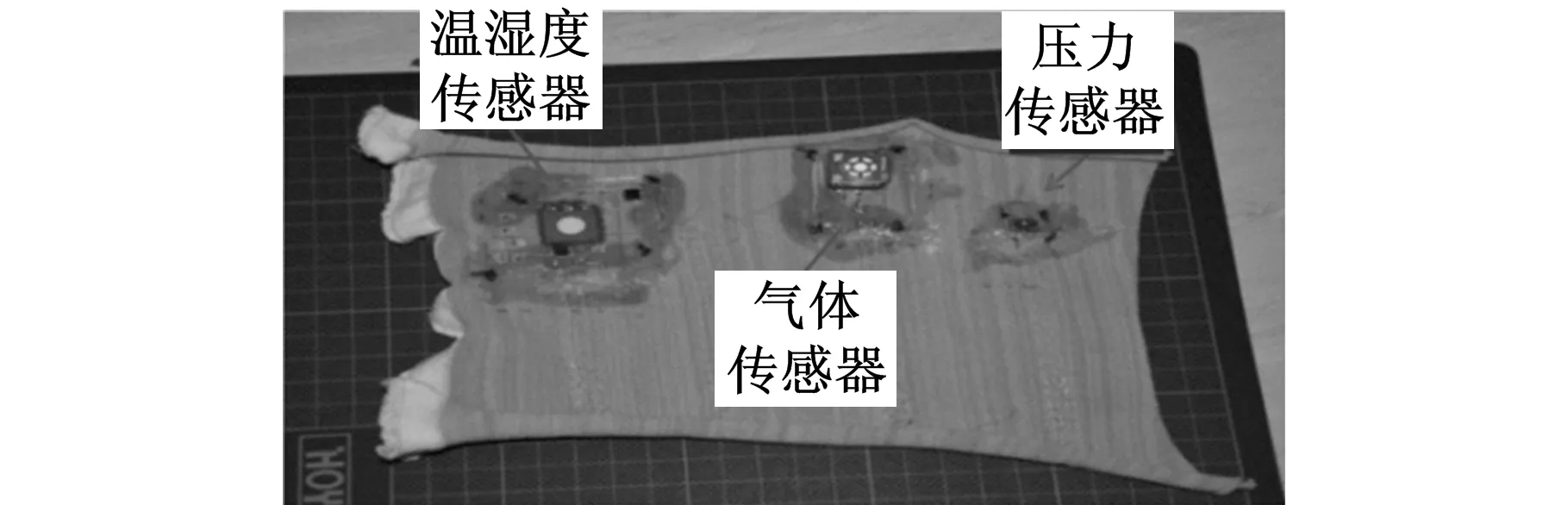
圖25 具有感知功能的全織物皮膚
3.3蛇形機器人分類
國內(nèi)外研制的蛇形機器人,在結(jié)構(gòu)上主要有兩大特點,一是連接機器人軀干單元的連接關(guān)節(jié)轉(zhuǎn)動功能,二是機器人與外界接觸的輪關(guān)節(jié)。
目前,蛇形機器人軀干單元均采用連桿式結(jié)構(gòu),軀干單元根據(jù)單軸轉(zhuǎn)動、雙軸轉(zhuǎn)動和三軸轉(zhuǎn)動的實現(xiàn)情況,可進行分類。將單軸轉(zhuǎn)動的關(guān)節(jié)按照轉(zhuǎn)動軸的平行安裝,可稱為單軸平行安裝方式的單軸轉(zhuǎn)動關(guān)節(jié),可實現(xiàn)蛇形機器人的蜿蜒和蠕動。而將單軸轉(zhuǎn)動的關(guān)節(jié)按照轉(zhuǎn)動軸的非共面正交安裝,可稱為非共面單軸正交安裝方式的雙軸轉(zhuǎn)動關(guān)節(jié),不僅能夠?qū)崿F(xiàn)蜿蜒和鼓風(fēng)琴運動,還能完成側(cè)向運動和攀爬運動。還有一種將單軸轉(zhuǎn)動的關(guān)節(jié)按照轉(zhuǎn)動軸的共面正交安裝,可稱為共面軸正交安裝方式的雙軸轉(zhuǎn)動關(guān)節(jié),如CRS。還有一種雙軸轉(zhuǎn)動關(guān)節(jié)是通過齒輪系設(shè)計,實現(xiàn)俯仰和偏航,如ACM-R5和Kullo等。三軸轉(zhuǎn)動關(guān)節(jié)不但可以實現(xiàn)俯仰和偏航運動,還能夠繞軀干單元的軸線方向進行轉(zhuǎn)動,如GMD-Snake2,盡管由此結(jié)構(gòu)組成的蛇形機器人能實現(xiàn)三維運動,但對伺服電機的輸出力矩要求很高,從而導(dǎo)致機器人的尺寸大,功耗大。
輪關(guān)節(jié)可分為主動輪和從動輪,主動輪能夠提高爬行能,從動輪是為滿足機器人在蜿蜒運動時摩擦力的各向異性條件而設(shè)計的。根據(jù)運動步態(tài)和功能的不同,蛇形機器人可以有從動輪結(jié)構(gòu)和無從動輪結(jié)構(gòu)。根據(jù)這兩個特點,可以將前面所述蛇形機器人進行分類,如表1所示。

表1 按結(jié)構(gòu)對蛇形機器人分類
從步態(tài)實現(xiàn)的角度,可以對表1所示的機器人進一步劃分,具體內(nèi)容如表2所示。
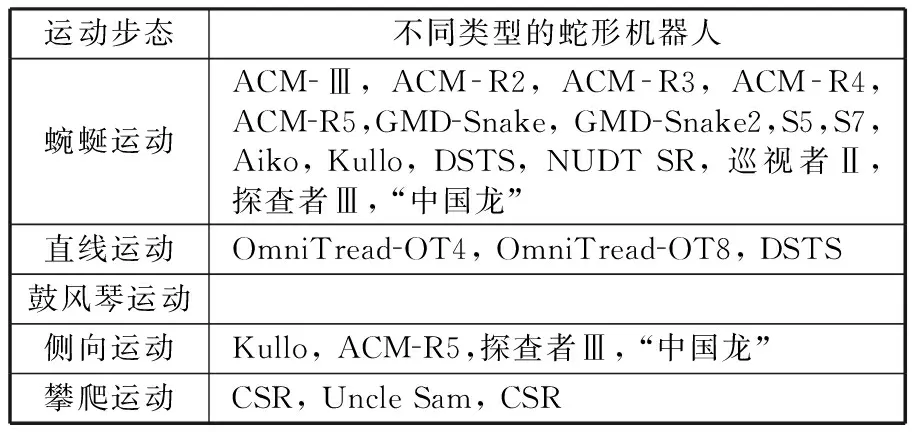
表2 按運動步態(tài)對蛇形機器人分類
4 蛇形機器人研究現(xiàn)狀分析
綜上對蛇形機器人理論和本體樣機的研究,從如下4個方面對其進行分析。
4.1運動性能分析
蛇形機器人的運動步態(tài)研究得到一定程度的發(fā)展。蜿蜒運動是一種具有高效率的運動步態(tài),成為步態(tài)研究重點,其他步態(tài)如蠕動、攀爬等也均得以實現(xiàn),但這些步態(tài)與生物蛇相比,仿生效果尚存在一定差距。目前的蛇形機器人大多具有平面運動能力,但三維運動能力匱乏。究其原因,可以總結(jié)為如下三點:一是蛇形機器人軀干單元采用單軸轉(zhuǎn)動關(guān)節(jié)。生物蛇在空間上可靈活轉(zhuǎn)動,使自身展現(xiàn)出更好的柔性效果,而蛇形機器人必須采用具有雙軸或三軸轉(zhuǎn)動關(guān)節(jié),才能達到模擬生物蛇運動的逼真效果。二是軀干單元尺寸大,輸出效率低,導(dǎo)致運動效果不佳,所以需要實現(xiàn)伺服電機小型化。三是三維運動理論研究處于瓶頸,仍需要進一步完善。現(xiàn)有的成果正處于蛇形機器人理論研究的初步探索階段,主要以適合平坦路面的二維運動為重點,對于運動產(chǎn)生機制、步態(tài)節(jié)奏控制方法等方面具有探索性的研究意義,而對于空間三維運動研究甚少,如當(dāng)機器人遇到低矮障礙時,或外界干擾引起身形發(fā)生大幅度變化時,憑借現(xiàn)階段的理論水平很難順利完成翻越運動,或調(diào)節(jié)自身體形適應(yīng)環(huán)境,并向前運動。可見,對于蛇形機器人運動理論研究尚不夠,遠不足以構(gòu)建研發(fā)高仿真蛇形機器人的理論框架。
4.2功能特性分析
經(jīng)過對蛇形機器人不斷研發(fā),其運動能力開始向?qū)崿F(xiàn)復(fù)雜運動方向發(fā)展。雙軸轉(zhuǎn)動關(guān)節(jié)的研制提高了機器人的靈活性和集成度,為三維運動的高仿生運動提供了基礎(chǔ)。嘗試性地將適應(yīng)領(lǐng)域從陸地向水陸兩棲發(fā)展,使蛇形機器人不僅具有陸地爬行能力,還具有水中的游動能力。
最新研發(fā)的蛇形機器人具有了一定的環(huán)境感知能力,其集成的壓力、視覺、距離、角度、速度等傳感器,使機器人能掌握所處環(huán)境的相關(guān)信息,通過數(shù)據(jù)融合技術(shù),可調(diào)節(jié)其適應(yīng)環(huán)境的控制參數(shù),滿足該環(huán)境下的運動要求。除此之外,蛇形機器人在結(jié)構(gòu)上開始向具有變形、分體等新功能發(fā)展,這樣結(jié)合多傳感器融合技術(shù),使其時刻敏感外部環(huán)境,可進行分體協(xié)同運動,以及完成必要的變形運動。這些都為機器人的自主運動實現(xiàn)提供了基本條件。
然而,在實現(xiàn)這些功能過程中,仍然存在一些問題需要克服。水陸兩棲機器人在水中需要不斷運動,由于密封部位處于周期性交替拉伸和舒張過程,長時間工作引起密封部位出現(xiàn)疲勞開膠,導(dǎo)致內(nèi)部漏水,控制系統(tǒng)無法正常工作,這便為機器蛇防水關(guān)節(jié)的密封性和續(xù)航時間提出了一定挑戰(zhàn)。對于暴露在外界的關(guān)節(jié),其容易受到外界猛烈的碰撞而破壞,所以需要選擇合適的結(jié)構(gòu)和高強度的材料作為加工的原材料,或者采用設(shè)計外加關(guān)節(jié)的保護套等措施來應(yīng)對。對于某些工作環(huán)境,僅僅依靠軀干單元的伺服電機機動力實現(xiàn)運動,不能得到有效的、高效率的爬行結(jié)果,可以考慮通過對從動輪施加動力,成為驅(qū)動輪,增強運動能力。在集成電路的設(shè)計上,需要格外考慮系統(tǒng)在集成各種傳感器后的可靠性問題,如散熱等。為滿足多功能、長續(xù)航的工作要求,蛇形機器人在保證低負載、便攜帶的條件下,需要裝配體積的高容量電池。
4.3運動環(huán)境分析
蛇形機器人的運動環(huán)境開始從二維平面環(huán)境向三維復(fù)雜環(huán)境發(fā)展。縱觀蛇形機器人的理論研究,均以結(jié)構(gòu)環(huán)境為應(yīng)用背景(即外界環(huán)境為已知的、有規(guī)則的),主要以平面的二維運動為主,適合實驗室研究,核電站等具有平坦路面的工作環(huán)境。對于叢林、草地、戈壁、震災(zāi)廢墟等多障礙、甚凹凸、極崎嶇等非結(jié)構(gòu)環(huán)境的應(yīng)用,蛇形機器人的應(yīng)用便具有很大的局限性,需要深入研究三維運動。況且,對于運動控制的研究,一種是以動力學(xué)為基礎(chǔ)的有模型控制,另一種是以神經(jīng)生理學(xué)CPG為主的控制方法。基于動力學(xué)模型的控制方法,在結(jié)構(gòu)環(huán)境下運動控制研究具有清楚、直觀和便于理解的特點,但對于非結(jié)構(gòu)環(huán)境下,基于該方法建立的模型則會及其復(fù)雜。而對于CPG控制方法,不依賴機器人精確的物理模型,便提供較可靠的控制信號,并且,此控制方法具有很好的穩(wěn)定性,可結(jié)合自適應(yīng)控制理論,提高蛇形機器人運動步態(tài)的仿生效果。
4.4項目資助分析
隨著國內(nèi)外對蛇形機器人的關(guān)注度不斷提高,對該領(lǐng)域的研究在不同國家得到格外重視,均取得了高水平的科研資助。
日本對蛇形機器人的資助,主要包括教育部科學(xué)、體育、文化、財政資助科學(xué)研究先進機器人研發(fā)的創(chuàng)新工程項目,國際救援系統(tǒng)研究所和國立地球科學(xué)防災(zāi)研究所共同資助的社會防震減災(zāi)項目等。美國對蛇形機器人研究受到了國家科學(xué)基金、國防部高級研究計劃局等的頂級資助,而且也得到了海軍青年研究學(xué)者部門的資助。
在我國,蛇形機器人研發(fā)同樣倍受重視,得到了國家、省地方的重點資助,其中包括國家自然科學(xué)基金、國家高技術(shù)研究發(fā)展計劃(863計劃)、中國科學(xué)院知識創(chuàng)新工程青年人才領(lǐng)域前沿項目、北京市科技計劃項目、北京市教委創(chuàng)新能力提升計劃項目、中央高校基本科研業(yè)務(wù)費專項資金項目、湖南省張花高速公路支持項目、交通運輸部西部交通建設(shè)科技項目等資助。
5 結(jié)論與展望
針對現(xiàn)代戰(zhàn)爭信息化、民用領(lǐng)域的廣泛需求,結(jié)合蛇形機器人易于偽裝、隱蔽性高、結(jié)構(gòu)緊密和高集成化等特點,本文對國內(nèi)外近40年的仿生蛇的理論研究和本體研制狀況進行了有針對性的研究。
根據(jù)生物蛇具有的蜿蜒運動、直線運動、鼓風(fēng)琴運動和側(cè)移運動等的基本步態(tài),國內(nèi)外提出了描述二維運動的Clothoid、Serpenoid和Serpentine曲線,建立了三維運動的螺旋曲線。為實現(xiàn)蛇形機器人的步態(tài)控制,從不同角度建立了的二維和三維的運動學(xué)模型和動力學(xué)模型,由此設(shè)計不同種類的步態(tài)控制器,并在穩(wěn)定性分析方面做了一定的研究。縱觀蛇形機器人本體研制狀況,日本、美國、德國、挪威、中國等國家通過不懈努力研發(fā),研究了具有不同功能的蛇形機器人,本文根據(jù)機器人結(jié)構(gòu)和運動步態(tài)的特點,對蛇形機器人進行了分類。而且,這些研究得到了不同國家的關(guān)注,得到了重要項目的大力資助。
盡管目前對蛇形機器人的研究已取得了一定的研究成果,但為提高其適應(yīng)能力,未來的工作需要從不同角度對蛇形機器人進行深入研究。
在運動能力方面,三維運動能力將全面提高蛇形機器人的運動能力,滿足適合復(fù)雜的、非結(jié)構(gòu)環(huán)境的需要,同時,將會加快并完善機器人由地面運動向水下運動的研究。結(jié)合生物蛇的其他運動能力,直立、攻擊等運動的研究也會逐漸走進視線。
在結(jié)構(gòu)方面,在研究小型化伺服電機的基礎(chǔ)上,蛇形機器人的軀干單元將會得到進一步的改進,并能夠提高機器人的柔性和靈活性。隨著變形結(jié)構(gòu)、分體結(jié)構(gòu)應(yīng)用,蛇形機器人對復(fù)雜、危險環(huán)境的適應(yīng)能力和生存能力將會大幅度提高。
在感知功能方面,全織物皮膚的研制為感知能力的探索開起了先河,視覺識別、視覺測距、氣體識別、輻射探測等功能均將得到重點研究,而且,根據(jù)不同傳感器的應(yīng)用特點,不同種類的感知皮膚會應(yīng)運而生,具有感知能力的蛇形機器人將會在機器人領(lǐng)域如雨后春筍般地涌現(xiàn)在智能舞臺上。
在工程實現(xiàn)方面,自給供電將便于蛇形機器人的運動,并有助于工作人員攜帶。這將會推進對于高性能小型化電池發(fā)展的研究步伐,有望解決小型機器人長航時的能源供給問題。隨著蛇形機器人多功能高集成化發(fā)展,大數(shù)據(jù)無線傳輸技術(shù)將會促進控制系統(tǒng)軟件、硬件向人機交互多智能系統(tǒng)發(fā)展,相信未來的蛇形機器人能夠勝任復(fù)雜、惡劣、危險環(huán)境的工作要求。
[1]Gray J. The Mechanism of Locomotion in Snakes[J]. Journal of Experimental Biology,1946, 23(2): 101-124.
[2]郁樹梅, 馬書根, 李斌, 等. 蛇形機器人步態(tài)產(chǎn)生及步態(tài)分析[J]. 機器人, 2011, 33(3):371-378.
Yu Shumei, Ma Shugen, Li Bi, et al. Gait Generation and Analysis for Snake-like Robots[J]. Robot, 2011,33(3):371-378.
[3]Hirose S. Biologically Inspired Robots (Snake-like Locomotors and Manipulators)[M]. Oxford:Oxford University Press, 1993.
[4]Ma S. Analysis of Snake Movement Forms for Realization of Snake-like Robots[C]//Proceedings of the 1999 IEEE, International Conference on Robotics& Automation.Detroit, Michigan, 1999: 3007-3013.
[5]Yamada H, Hirose S. Study on the 3D Shape of Active Cord Mechanism[C]//Proceeding of the 2006 IEEE International Conference on Robotics and Automation.Orlando, Florida, 2006:2890-2895.
[6]Burdick J W, Radford J, Chirikjian G S. A Sidewinding Locomotion Gait for Hyper-Redundant Robots[C]//IEEE International Conference on Robotics and Automation.Atlanta, GA, 1993:3007-3013.
[7]孫洪, 劉立祥, 馬培蓀. 攀爬蛇形機器人爬樹的靜態(tài)機理研究[J]. 機器人, 2008, 30(2): 112-122.
Su Hong, Liu Lixiang, Ma Peisun. On the Tree-Climbing Static Mechanism of a Snake Robot Climbing Trees[J]. Robot, 2008, 30(2):112-122.
[8]Yamada H, Hirose S. Approximations to Continuous Curves of Active Cord Mechanism Made of Arc-shaped Joints or Double Joints[C]//2010 IEEE International Conference on Robotics and Automation.Anchorage, Alaska, 2010: 703-708.
[9]Hu D, Nirody J, Scott T, et al. The Mechanics of Slithering Locomotion[J]. PNAS, 2009, 106(25): 10081-10085.
[10]Kelly S, Murray R. Geometric Phases and Robotic Locomotion[J]. Journal of Robotic Systems, 1995, 12(6): 417-431.
[11]Ostrowski J, Burdick J. The Geometric Mechanics of Undulatory Robotic Locomotion[J].The International Journal of Robotics Research, 1998, 17(7): 683-701.
[12]Nilsson M. Serpentine Locomotion on Surfaces with Uniform Friction[C]//Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems.Sendal, Japan, 2004:1751-1755.
[13]Shapiro A, Greenfield A, Choset H. Frictional Compliance Model Development and Experiments for Snake Robot Climbing[C]//2007 IEEE International Conference on Robotics and Automation.Roma, Italy, 2007:574-579.
[14]Liljeback P, Pettersen K, Stavdahl φ. Modelling and Control of Obstacle-Aided Snake Robot Locomotion Based on Jam Resolution[C]//2009 IEEE International Conference on Robotics and Automation.Kobe, Japan, 2009:3807-3814.
[15]Rincon D, Sotelo J. Dynamic and Experimental Analysis for Inchwormlike Biomimetic Robots[J]. IEEE Robotics& Automation Magazine, 2003: 53-57.
[16]Ma S, Tadokopo N. Analysis of Creeping Locomotion of a Snake-like Robot on a Slope[J]. Autonomous Robots, 2006, 20:15-23.
[17]李斌, 盧振利. 基于樂理的蛇形機器人控制方法研究[J]. 機器人, 2005, 27(1): 14-19.
Li Bin, Lu Zhenli. Control Method of a Snake-like Robot Based on Music Theory[J]. Robot, 2005, 27(1):13-19.
[18]張佳帆, 楊燦軍, 陳鷹, 等. 蠕動式機器蛇的研究與開發(fā)[J].機械工程學(xué)報, 2005, 41(5):205-209.
Zhang Jiafan, Yang Canjun, Chen Ying, et al. Study and Develop of Snake-Robot with Concerpina-Locomotion[J]. Chese Journal of Mechanical Engineering, 2005, 41(5):2005-209.
[19]孫洪, 馬培蓀, 王光榮. 蛇形機器人一種基于Serpenoid 曲線的蠕動步態(tài)[J]. 機械設(shè)計與研究, 2008, 24(1):39-50.
Sun Hong, Ma Peisun, Wang Guangrong. An Inchworm Locomotion Gait Based on Serpenoid Curve for Snakelike Robot[J]. Machine Design and Research, 2008, 24(1):39-50.
[20]Chirikjian G. The Kinematics of Hyper-Redundant Robot Locomotion[J]. IEEE Transactions on Robotics and Automation, 1995, 11(6):781-793.
[21]Hatton R, Choset H. Sidewinding on Slopes[C]//2010 IEEE International Conference on Robotics and Automation.Anchorage, Alaska, 2010:691-696.
[22]Gong C, Hatton R, Choset H. Conical Sidewinding[C]//IEEE International Conference on Robotics and Automation.Saint Paul, Minnesota, 2012: 4222-4227.
[23]孫洪. 攀爬蛇形機器人的研究[D]. 上海: 上海交通大學(xué), 2007.
[24]Date H, Hoshi Y, Sampei M. Locomotion Control of a Snake-like Robot Baesed on Dynamic Manipulability[C]//Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems.Takamatsu, 2000: 2236-2241.
[25]Prautsch P, Mita T. Control and Analysis of the Gait of Snake Robots[C]//Proceedings of the 1999 IEEE International Conference on Control Applications.Kohala Coast, HI, 1999: 502-507.
[26]Matsuno F, Sato H. Trajectory Tracking Control of Snake Robots Based on Dynamic Mode[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation.Barcelona, Spain, 2005: 3029-3034.
[27]Li J, Shan J. Passivity Control of Underactuated Snake-like Robots[C]//Proceedings of the 7th World Congress on Intelligent Control and Automation.Chongqing, China, 2008: 485-490.
[28]Liljeback P, Pettersen K, Stavdahl φ. Controllability and Stability Analysis of Planar Snake Robot Locomotion[J]. IEEE Transactions on Automatic Control, 2011, 56(6): 1365-1380.
[29]Ma S, Ohmameuda Y, Inoue K, et al. Control of a 3-Dimensional Snake-like Robot[C]//Proceedings of the 2003 IEEE International conference on Robotics and Automation.Taipei, Taiwan, China,2003: 2067-2072.
[30]陳麗, 王越超, 馬書根, 等. 蛇形機器人側(cè)向運動的研究[J]. 機器人, 2003, 25(3):246-249.
Chen Li, Wang Chaoyue, Ma Shugen, et al.Study of Lateral Locomotion of Snake Robot[J]. Robot, 2003, 25(3): 246-249.
[31]魏武, 孫洪超. 蛇形機器人橋梁纜索攀爬步態(tài)控制研究[J]. 中國機械工程, 2012, 23(10): 1230-1236.
Wei Wu, Sun Hongchao. Research on Gait Generation and Control of Snake-like Robot for Bridge Cable Climbing[J]. China Mechanical Engineering, 2012, 23(10): 1230-1236.
[32]盧振利, 馬書根, 李斌, 等. 基于循環(huán)抑制CPG模型的蛇形機器人控制器[J]. 機械工程學(xué)報, 2006, 42(5): 137-143.
Lu Zhenli, Ma Shugen, Li Bin, et al. Snake-like Robot Controller with Cyclic Inhibitory CPG Model[J]. Chinese Journal of Mechanical Engineering, 2006, 42(5): 137-143.
[33]盧振利, 馬書根, 李斌, 等. 基于循環(huán)抑制CPG模型的蛇形機器人蜿蜒運動[J]. 自動化學(xué)報, 2006, 32(1): 132-139.
Lu Zhenli, Ma Shugen, Li Bin, et al. Serpentine Locomotion of a Snake-like Robot Controlled by Cyclic Inhibitory CPG Model[J]. ACTA Automatica Sinica, 2006, 32(1): 132-139.
[34]盧振利, 馬書根, 李斌,等. 基于循環(huán)抑制CPG模型的蛇形機器人三維運動[J]. 自動化學(xué)報, 2007, 33(1): 54-58.
Lu Zhenli, Ma Shugen, Li Bin, et al. 3-dimensional Locomotion of a Snake-like Robot Controlled by Cyclic Inhibitory CPG Model[J]. ACTA Automatica Sinica, 2006, 32(1): 132-139.
[35]王智鋒, 馬書根, 李斌, 等. 基于能量的蛇形機器人蜿蜒運動控制方法的仿真和實驗研究[J]. 自動化學(xué)報, 2011, 37(5): 604-613.
Wang Zhifeng, Ma Shugen, Li Bin, et al. Simulation and Experimental Study of an Energy-based Control Method for the Serpentine Locomotion of a Snake-like Robot[J]. ACTA Automatica Sinica, 2011, 37(5): 604-613.
[36]Wu X. Ma S. CPG-based Control of Serpentine Locomotion of a Snake-like Robot[J]. Mechatronics, 2010,20:326-334.
[37]Mori M, Hirose S. Three-dimensional Serpentine Motion and Lateral Rolling by Active Cord Mechanism ACM-R3[C]//Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems.Lausanne, Switzerland, 2002:829-834.
[38]Takaoka S, Yamada H, Hirose S. R4:2011Snake-like Active Wheel Robot ACM-R4.1 with Joint Torque Sensor and Limiter[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems.San Francisco, 2011: 1081-1086.
[39]Yamada H, Hirose S. Study of a 2-DOF Joint for the Small Active Cord Mechanism[C]//2009 IEEE International Conference on Robotics and Automation.Kobe, Japan, 2009:3827-3832.
[40]Worst R, Linnemann R. Construction and Operation of a Snake-like Robot[C]//IEEE International Joint Symposia on Intelligence and Systems.Rockville, MD, 1996: 164-169.
[41]Klaassen B, Paap K. GMD-Snake2: A Snake-Like Robot Driven by Wheels and a Method for Motion Control[C]//Proceedings of IEEE International Conference on Robotics and Automation.Detroit, MI, 1999: 3014-3019.
[42]Borenstein J, Borrell A. The OmniTread OT-4 Serpentine Robot[C]//2008 IEEE International Conference on Robotics and Automation.Pasadena,CA,2008:1766-1767.
[43]Gavin M. S5 Snake Robot Prototype[EB/OL]. 1999[2014-05-10]. http://www.snakerobots.com/
[44]Wright C, Buchan A, Brown B, et al. Design and Architecture of the Unified Modular Snake Robot[C]//2012 IEEE International Conference on Robotics and Automation (ICRA).Saint Paul, MN, 2012:4347-4354.
[45]Wright C, Johnson A, Peck A, et al. Design of a Modular Snake Robot[C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems.San Diego, CA, 2007:2609-2614.
[46]McKenna J, Anhalt D, Frederick Bronson et al. Toroidal Skin Drive for Snake Robot Locomotion[C]//2008 IEEE International Conference on Robotics and Automation.Pasadena,CA, 2008:1150-1155.
[47]Liljeback P,Stavdahl φ, Beitnes A. Snake Fighter-Development of a Water Hydraulic Fire Fighting Snake Robot[C]//The 9th International Conference on Control, Automation, Robotics and Vision.Singapore,2006:1-6.
[48]PhysOrg.com. Robots, the Bizarre and the Beautiful[EB/OL]. (2009-09-29)[2014-05-10]. http://phys.org/news141921497.html.
[49]Transeth A, Liljeback P, Pettersen K. Snake Robot Obstacle Aided Locomotion: An Experimental Validation of a Non-smooth Modeling Approach[C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems.San Diego, CA, 2007:2582-2589.
[50]Liljeback P, Pettersen K, Stavdahl φ. A Snake Robot with a Contact Force Measurement System for Obstacle-aided Locomotion[C]//2010 IEEE International Conference on Robotics and Automation.Anchorage, Alaska, 2010:683-690.
[51]葉長龍, 馬書根, 李斌, 等. 三維蛇形機器人巡視者Ⅱ的開發(fā)[J]. 機械工程學(xué)報, 2009, 45(5): 128-133.
Ye Changlong, Ma Shugen, Li Bin, et al. Development of a Three Dimensional Snake-like Robot Rerambulator Ⅱ[J]. Journal of Mechanical Engineering, 2009, 45(5): 128-133.
[52]郁樹梅, 王明輝, 馬書根, 等. 水陸兩棲蛇形機器人的研制及其陸地和水下步態(tài)[J]. 機械工程學(xué)報, 2012, 48(9): 18-25.
Yu Shumei, Wang Minghui, Ma Shugen, et al. Development of an Amphibious Snake-like Robot and Its Gait on Ground and in Water[J]. Journal of Mechanical Engineering, 2012, 48(9): 18-25.
[53]孫洪, 劉立祥, 馬培蓀. 一種新型的攀爬蛇形機器人[J]. 傳動技術(shù), 2008, 22(3):34-48.
Sun Hong, Liu Lixiang, Ma Peisun. A New Type Climbing Snake Robot[J]. Drive system Technique, 2008, 22(3):34-48.
[54]吉愛紅, 戴振東, 周來水. 仿生機器人的研究進展[J]. 機器人, 2005, 27(3):284-288.
Ji Aihong, Dai Zhendong, Zhou Laishui. Research Development of Bio-inspired Robotics[J]. Robot, 2005, 27(3):284-288.
(編輯郭偉)
Present Situation and Development Tendency of Snake-like Robots
Su Zhong1,2Zhang Shuangbiao2Li Xingcheng2
1.Beijing Information Science & Technology University,Beijing,100101 2.Beijing Institute of Technology,Beijing,100081
A literature survey of researches on snake-likes was provided regarding morphology, modeling of kinematics and dynamics, locomotion control and stability. The analyses and summary were made according to the two-dimensional and three-dimensional locomotions. Classifications of snake-like robots were presented due to the differences of structures and movement types. Finally, the development of snake-like robots in future was predicted.
locomotion; kinematics; dynamics; control method; stability
2014-02-11
國家自然科學(xué)基金委員會及香港研究資助局聯(lián)合科研基金資助項目(61261160497);北京市科技計劃項目(Z121100001612007);北京市教委創(chuàng)新能力提升計劃項目(PXM2013_014224_000093)
TP242DOI:10.3969/j.issn.1004-132X.2015.03.022
蘇中,男,1962年生。北京信息科技大學(xué)通信學(xué)院院長、教授,北京理工大學(xué)自動化學(xué)院博士研究生導(dǎo)師,高動態(tài)導(dǎo)航技術(shù)北京市重點實驗室主任。張雙彪(通信作者),男,1984年生。北京理工大學(xué)宇航學(xué)院博士研究生。李興城,男,1969年生。北京理工大學(xué)宇航學(xué)院副研究員。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學(xué)學(xué)報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設(shè)計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學(xué)報(2017年2期)2017-07-05 08:13:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19