變剛度電液力加載系統性能研究
2015-10-29 02:27:49傅曉云賀向宗李寶仁
中國機械工程 2015年2期
關鍵詞:系統
傅曉云 賀向宗 李寶仁
華中科技大學,武漢,430074
變剛度電液力加載系統性能研究
傅曉云賀向宗李寶仁
華中科技大學,武漢,430074
針對海洋船舶拖曳系統半實物仿真的需要,設計了以鋼絲繩為力傳遞介質的電液力加載系統。建立了力加載系統的數學模型,通過試驗得出了鋼絲繩剛度與加載力的對應關系式;分析了鋼絲繩剛度對系統性能、控制器設計的影響,得出鋼絲繩剛度減小會導致力加載系統頻寬減小、滯后增大的結論。基于此設計了變增益前饋補償控制器。試驗結果表明,該方法提高了系統加載力跟蹤精度。
電液力加載;鋼絲繩剛度;復合控制;輸入前饋
0 引言
海洋船舶拖曳系統是一種廣泛應用于海洋作業的水下裝置,應用前需要進行大量試驗驗證,而傳統的海上試驗成本高、周期長,不能滿足頻繁試驗的要求。為此,采用負載模擬器對裝置進行半實物仿真試驗,以提高試驗效率,降低試驗成本,改良試驗條件。
1 電液力加載裝置模型的建立
電液力加載裝置結構如圖1所示,其中,力加載系統采用閥控液壓馬達形式,以鋼絲繩為力傳遞介質,用來復現海洋船拖曳過程中的拉力變化(模擬吊放重物從水上狀態到水下狀態的力變化過程)。加載力在8~120 kN范圍內連續變化,力加載裝置頻率為0.05~1 Hz。
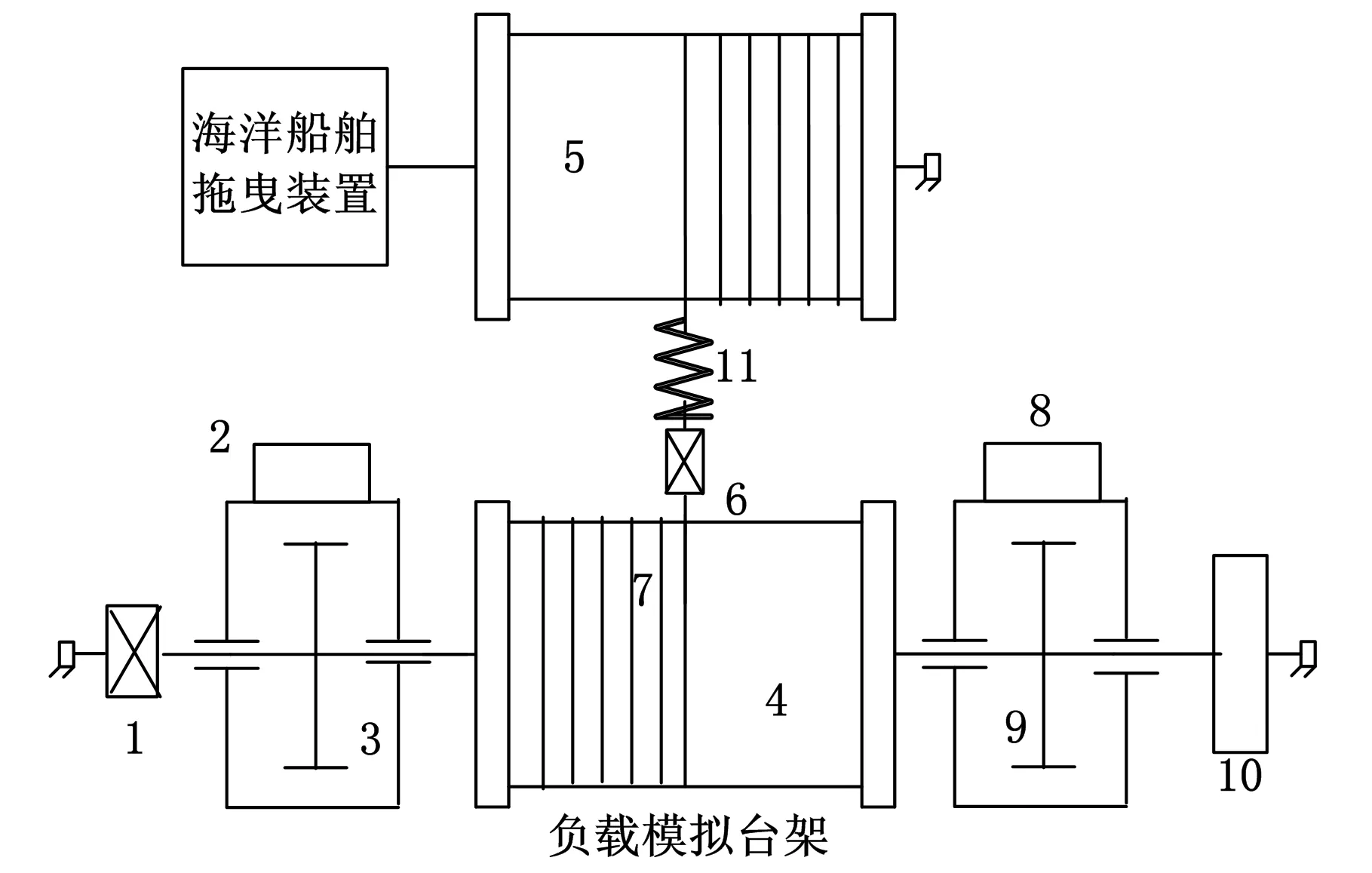
1.速度編碼器 2.伺服閥 3. 液壓馬達 4.力加載絞車 5.拖曳絞車 6.拉力傳感器 7.鋼絲繩 8.伺服閥 9.液壓馬達 10.慣性裝置 11.鋼絲繩等效彈簧剛度圖1 海洋船拖曳系統試驗室半實物仿真結構原理圖
對電液力加載裝置進行數學建模時,假定拖曳裝置轉速為0,伺服閥簡化為比例環節。由圖1及閥控馬達的基本方程[1]得出系統方框圖(圖2)。由圖2得系統開環傳遞函數(忽略外扭矩干擾TL):
(1)
式中,Kv為系統的開環增益,Kv=KeKaKsvkR/Dm;Ke為力誤差信號轉換為直流電壓信號增益;Ka為伺服放大器增益;Ksv為伺服閥流量增益;k為鋼絲繩剛度;R為卷筒半徑;Dm為液壓馬達排量;Vt為液壓馬達兩腔及連接管道總容積;Kce為總流量-壓力系數;Jt為液壓馬達和負載折算到馬達軸上的總慣量;Bm為液壓馬達和負載的黏性阻尼系數;K為有效體積彈性模量。
將式(1)簡化為[1-2]
(2)
式中,ωr為慣性環節轉折頻率;Gh為液壓扭轉彈簧剛度;Kx為系統的開環增益;ω0為綜合固有頻率;ξ0為綜合阻尼比。
由式(2)可以看出,鋼絲繩剛度k是關系到系統性能的重要參數,影響系統的轉折頻率、綜合固有頻率、綜合阻尼比。因此,文中以鋼絲繩剛度k為主線,對力加載系統性能、控制策略進行討論。
2 鋼絲繩剛度確定
實際使用中,鋼絲繩直徑為32 mm,兩裝置的水平間距為20 m,鋼絲繩簡化模型如圖3所示,一端固連,一端加載。假設鋼絲繩初始所受拉力為F,由于鋼絲繩受重力和集中載荷的作用,其實際軌跡線為L。當拉力增加ΔF時,鋼絲繩長度將減小Δl(分別為彈性變形和克服重力的位移變形),鋼絲繩軌跡線變為圖3中的虛線。因此鋼絲繩剛度應包括彈性剛度和克服重力剛度。

圖2 電液力加載裝置的系統方框圖
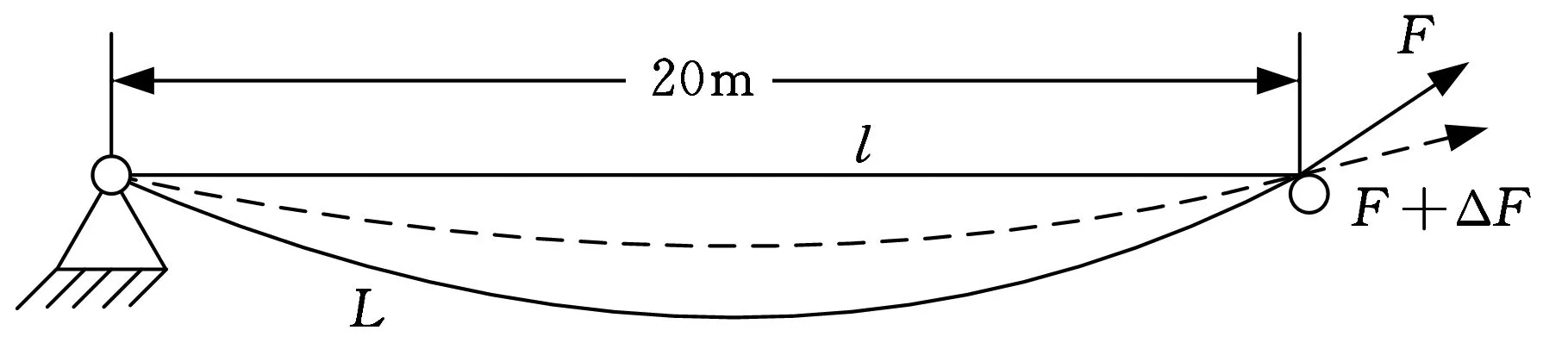
圖3 鋼絲繩簡化模型
鋼絲繩的彈性模量或剛度與布置結構、所受拉力、自身長度、使用時間等眾多因素有關[2]。為得到系統中鋼絲繩剛度的準確值,對系統進行定量分析,研究中采用位移-拉力試驗法來求解鋼絲繩剛度。試驗中,利用電液力加載裝置輸入階躍信號(階躍信號從10 kN開始,每次跳躍幅值為10 kN,直至到達120 kN),用速度編碼器對時間積分得出位移變化Δl。多次測量后,利用虎克定律得出當前拉力下的鋼絲繩剛度。圖4、圖5所示分別為拉力階躍響應和對應速度曲線。
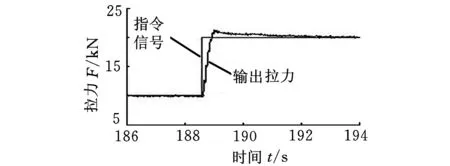
圖4 階躍響應曲線
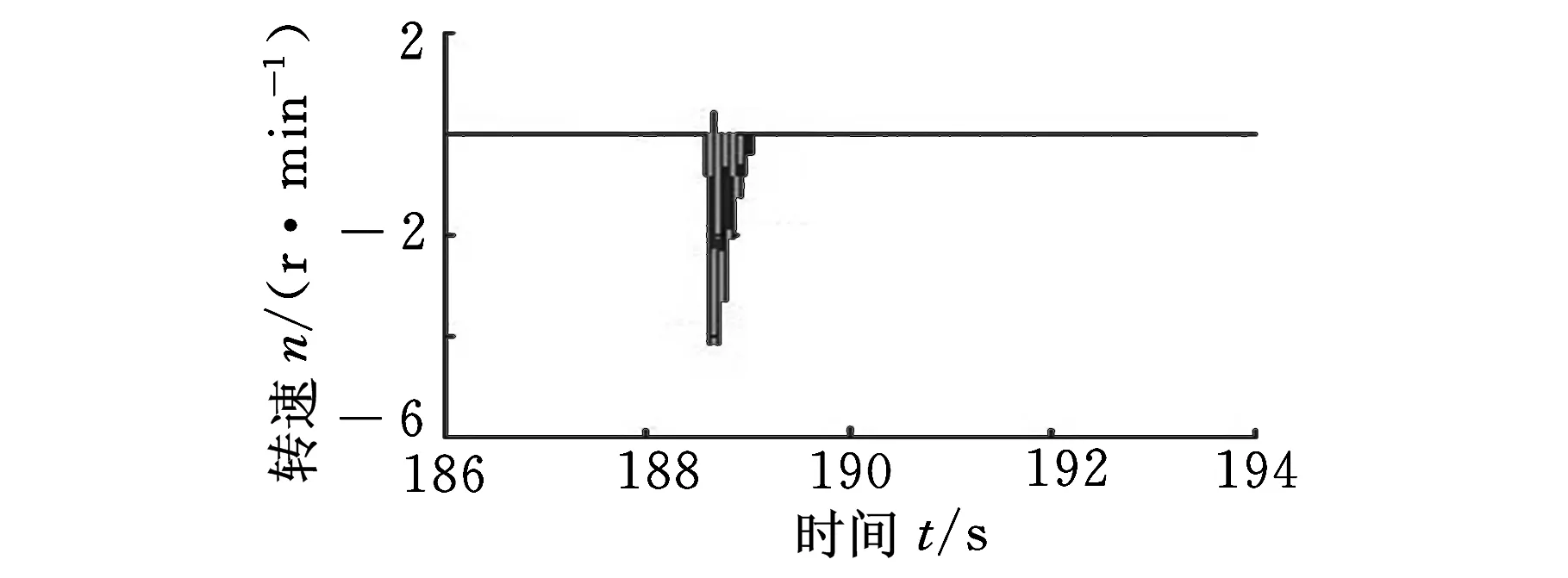
圖5 階躍響應時速度曲線
試驗得出的鋼絲繩剛度曲線如圖6所示,運用最小二乘法二次擬合得到的曲線表達式為
k=-6.667×10-5F2+25.5F+2.03×105
(3)
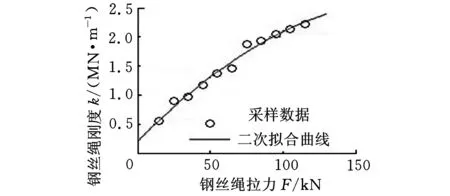
圖6 鋼絲繩剛度同所受拉力對應關系
從圖6和式(3)可知,鋼絲繩剛度隨所受拉力的增加而增加,呈非線性。
3 鋼絲繩剛度變化對系統性能的影響
已知系統中各項參數:Dm=1.201×10-3m3/rad,Ke=0.6×10-5V/N,Vt=9.04×10-3m3,Ka=1.0×10-3A/V,Jt=720 kg·m2,Ksv=0.33 m3/(A·s),Bm=0.1 N·m·s/rad,Kce=1.1×10-11m5/(N·s),K=700 MPa,R=0.34 m。
為分析鋼絲繩剛度變化對系統性能的影響,選取拉力為10 kN、30 kN、60 kN、90 kN(對應圖7中曲線1~4)時對應鋼絲繩的剛度為研究對象,將參數分別代入開環傳遞函數(式(2))中,得出4個點分別對應的Bode圖(圖7)。
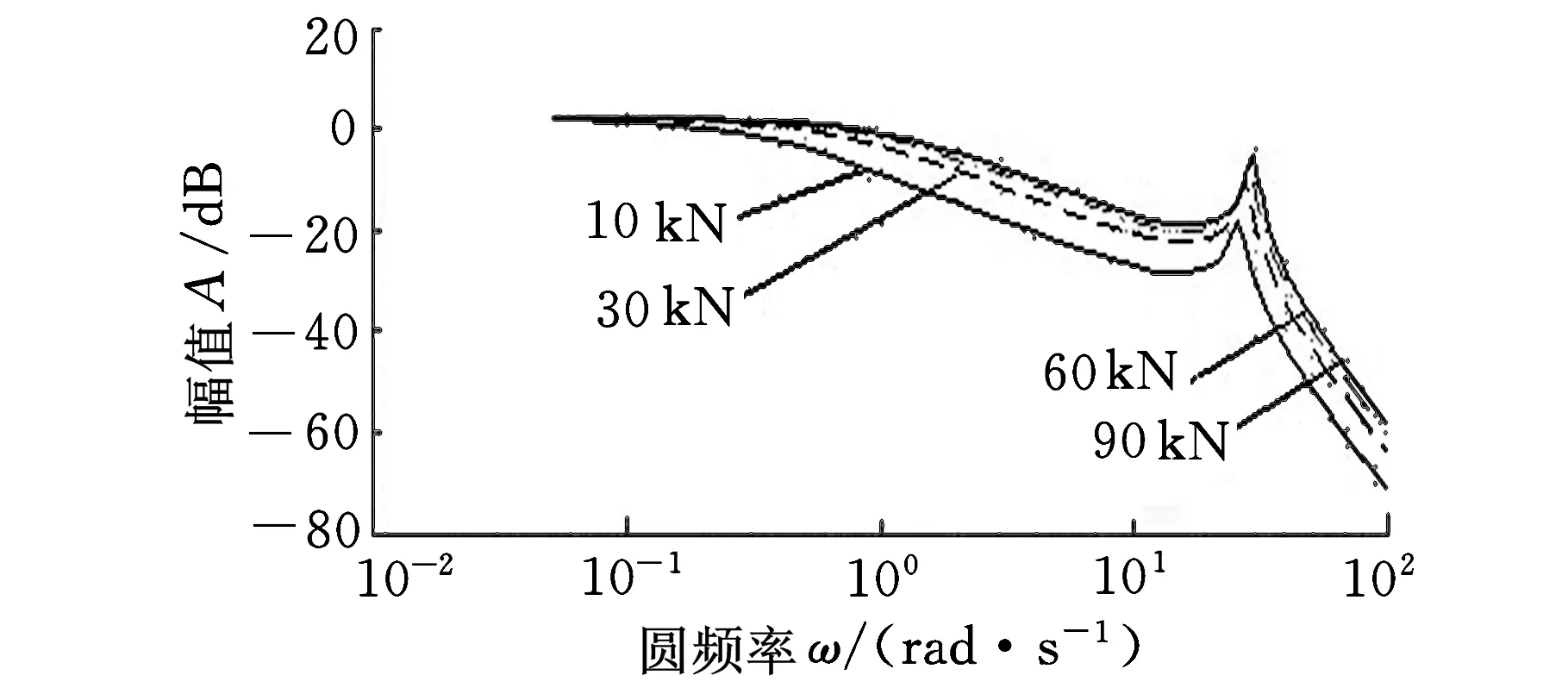
(a)幅頻曲線
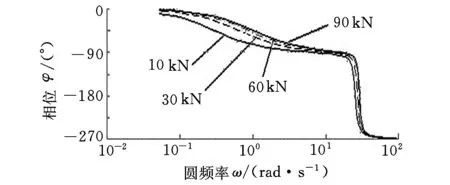
(b)相頻曲線圖7 系統開環頻率特性曲線
從圖7看出:當鋼絲繩剛度k減小時,系統轉折頻率ωr、穿越頻率ωc降低,頻寬減小,且小于1 Hz;幅值裕度和相位裕度增加,系統的穩定性變好,但系統在1 Hz附近響應變慢,力跟蹤滯后嚴重。
加載力在連續變化時,為了消除鋼絲繩剛度變化對系統性能的影響,采取的主要方法有:①在結構上,若條件允許,安裝排攬機構,增加鋼絲繩的支撐點,使鋼絲繩盡量水平,以減小鋼絲繩剛度的變化范圍,限制鋼絲繩抖動;②在控制上,采用插值法實時調整PID控制器參數或者采用自適應控制器等[2,4];③對于力跟蹤相位滯后嚴重的現象,僅應用反饋控制器是不夠的,需在控制器中增加輸入前饋補償來提高力跟蹤精度[5-8]。
4 變鋼絲繩剛度對前饋補償系數的影響
為了提高系統的力跟蹤精度,消除相位滯后,控制器中引入了輸入前饋補償環節,優點在于[5-8]:①從理論上分析,當補償器滿足一定條件時,系統輸出量可完全復現輸入量,且誤差恒為0;②前饋補償為開環控制方式,不會影響到系統的穩定性,不改變反饋控制系統的特性;③前饋控制減輕了反饋控制的負擔,反饋控制的增益可取得小一些,有利于系統的穩定。復合控制器原理如圖8所示,其中,Gr(s)為輸入前饋補償傳遞函數,如式(4)所示;G0(s)為反饋控制器,文中為PID控制器;G(s)為系統的開環傳遞函數,如式(2)所示,其中H(s)為1。
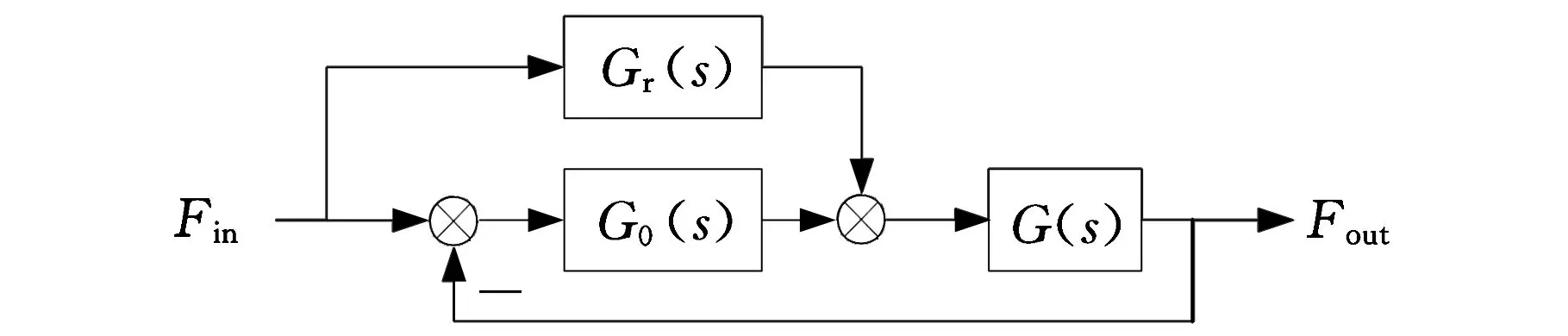
圖8 含輸入前饋補償的復合控制系統方框圖
對輸入的全補償條件為[6]
Gr(s)=1/G(s)
(4)
由于G(s)很難準確知道,所以輸入全補償在物理上往往無法準確實現。然而通過圖7系統開環Bode圖得出,影響系統性能的主要因素為慣性環節,因此可將G(s)簡化為慣性環節,則Gr(s)=(s+ωr)/(ωrKx)。該方法不僅減小了相位滯后,而且容易實現。
根據式(2)和第3節的分析得出:系統轉折頻率ωr同鋼絲繩剛度k有關,且隨鋼絲繩剛度k增大而增加;因此在進行輸入前饋補償時,一次項系數應隨輸出力的變化而實時不斷調整,且其值隨輸出力的增大而減小。
在系統試驗中,分別采用無輸入前饋的PID控制器和加輸入前饋的PID控制器,對幅值為5 kN,頻率為1 Hz,偏置分別為30 kN和60 kN的力正弦信號進行跟蹤,試驗結果如圖9~12所示。
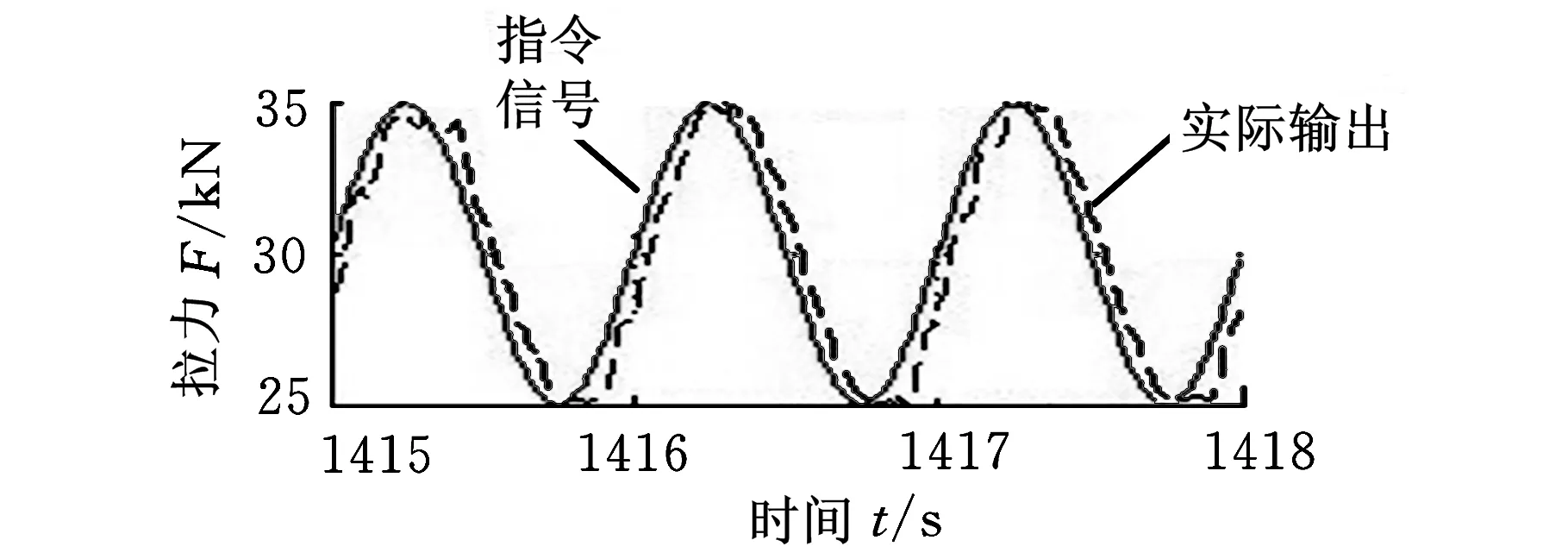
圖9 30 kN處1 Hz控制曲線(無前饋)
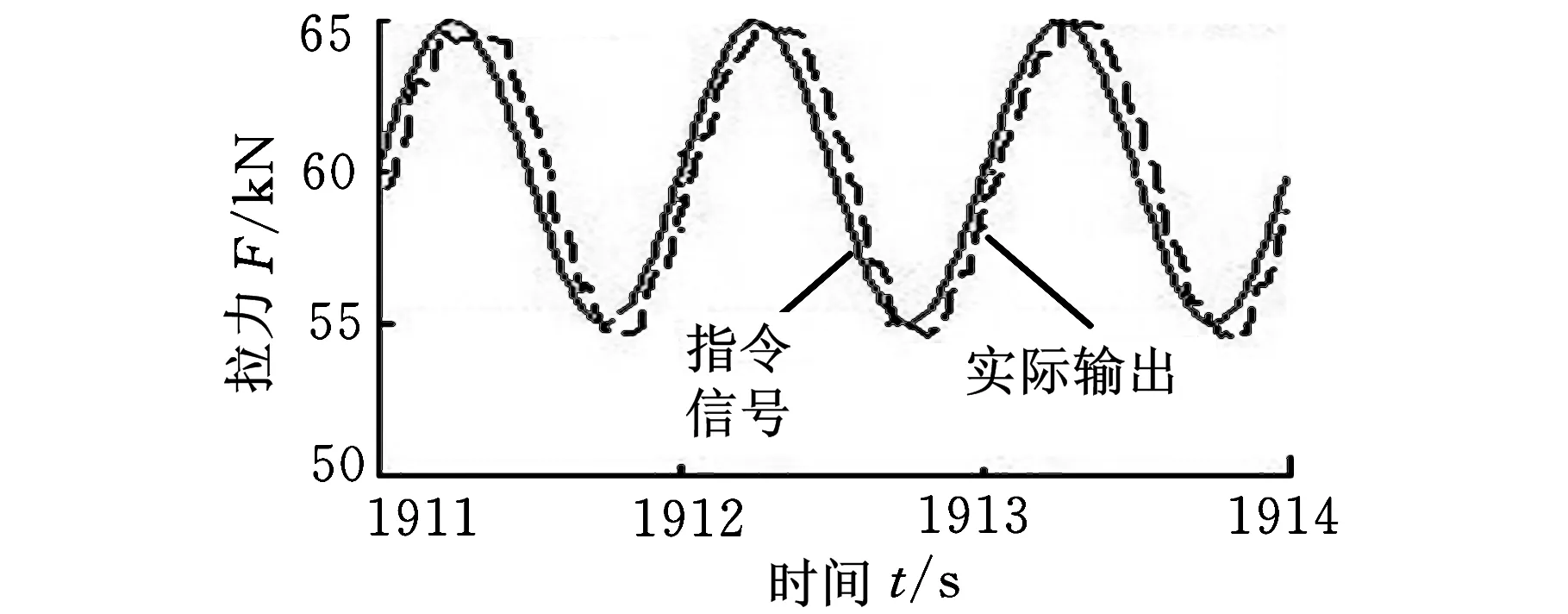
圖10 60 kN處1 Hz控制曲線(無前饋)
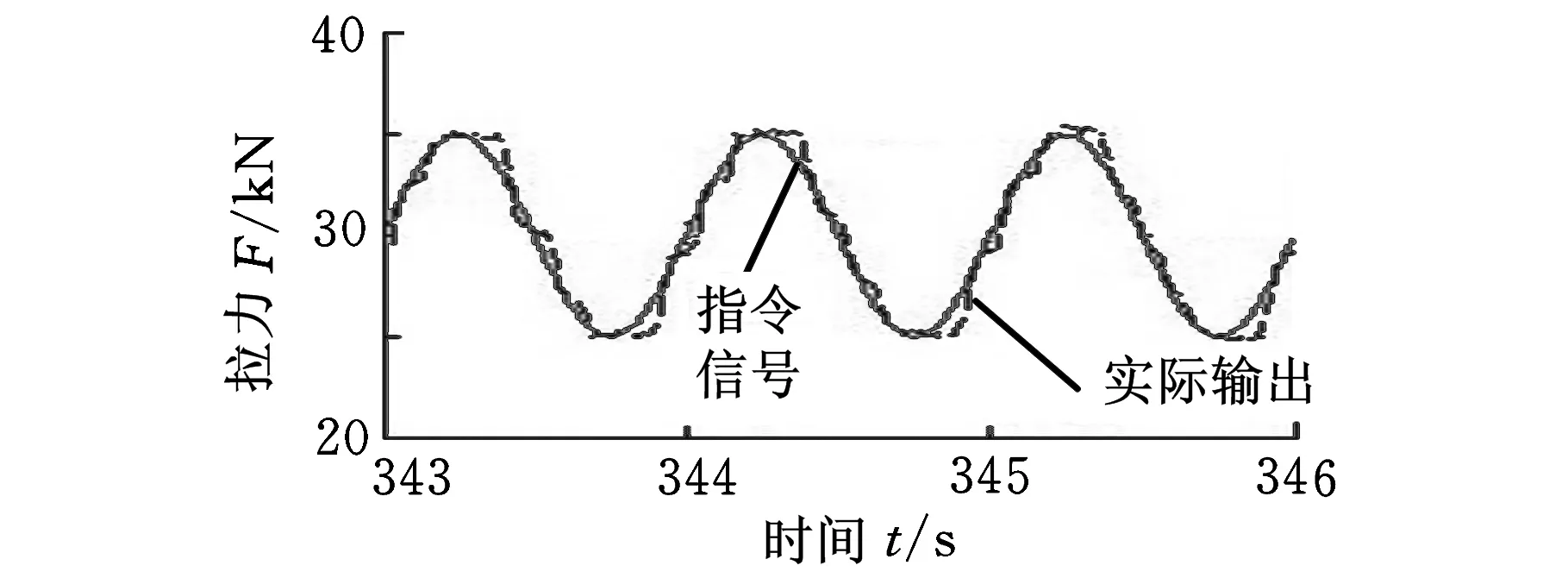
圖11 30 kN處1 Hz控制曲線(有前饋)
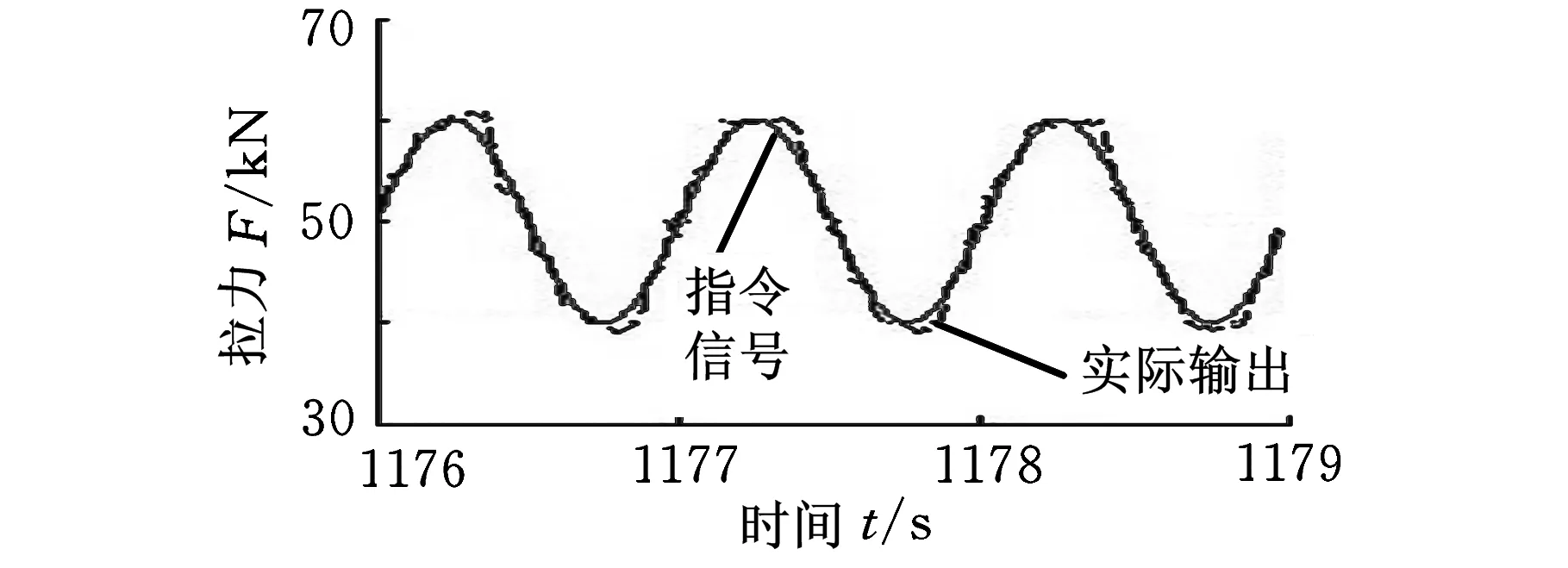
圖12 60 kN處1 Hz控制曲線(有前饋)
試驗證明:前饋補償后,跟蹤相位分別由18.57°、18.64°減小為5.74°和4.46°,在控制器中加入輸入補償提高了系統力跟蹤精度,減小了相位差;鋼絲繩剛度隨輸出力變化,使得ωr為變量,因此輸入一次項系數應隨輸出力變化進行實時調整,如在含前饋補償試驗時,前饋的一次項系數在偏置為30 kN時為0.4,60 kN時為0.35。
5 結論
(1)通過位移-拉力試驗法和最小二乘曲線擬合法,得出了鋼絲繩剛度與加載力的關系式,為系統性能分析、高性能控制器的設計提供了依據。
(2)由系統Bode圖可以看出,鋼絲繩剛度隨加載力的變化而變化,影響到力加載系統的頻寬、響應速度、穩定裕度。
(3)試驗表明,在控制器中加入輸入補償,并對補償器一次項系數進行實時調整后,相位滯后減小到10°以內,提高了力跟蹤精度。
[1]王春行.液壓控制系統[M].北京:機械工業出版社,1999.
[2]張利順,張玉珊,王秀波,等.鋼絲繩彈性模量研究的現狀與發展方向[J].林業科技,1996(6):55-57.
Zhang Sunli,Zhang Yushan,Wang Xiubo,et al.Present Status and Development Direction of the Steel Wire Rope of the Elastic Modulus[J].Forestry Science & Technology,1996(6):55-57.
[3]趙克定,劉冬. 負載剛度對主動式電液力控制系統性能的影響[J].液壓·氣動·密封,2005(6):23-24.
Zhao Keding,Liu Dong.Effection of Load Rigidity to the Performance of Active Electro-hydraulic Force Controlling System[J].Hydraulics Pneumatics & Seals,2005(6):23-24.
[4]奧斯特隆姆 K J,威頓馬克 B.自適應控制[M].李清泉,李翔,張兆義,等,譯.北京:科學出版社,1992.
[5]Alleyne A, Liu R. On the Limitation of Force Tracking Control for Hydraulic Servos Systems[J]. Journal of Dynamic Systems,Measurement and Control,1999,121(2):184-190.
[6]馮巧玲.自動控制原理[M].2版.北京:北京航空航天大學出版社,2007.
[7]焦宗夏,華清,王曉東,等.電液負載模擬器的復合控制[J].機械工程學報,2002,12(12):34-37.
Jiao Zongxia,Hua Qing,Wang Xiaodong,et al.Hybrid Control on the Electro-hydraulic Load Simulator[J].Chinese Journal of Mechanical Engineering,2002,12(12):34-37.
[8]Tomizuka Masayoshi. Adaptive Zero Phase Error Tracking Algorithm for Digital Control[J].Journal of Dynamic Systems,Measurement and Control,1987,109:349-354.
(編輯張洋)
Investigation of Electro-Hydraulic Loading System with Variable Stiffness
Fu XiaoyunHe XiangzongLi Baoren
Huazhong University of Science and Technology,Wuhan,430074
An electro-hydraulic loading system,conveying force by wire-rope,was designed to meet the requirements of hardware-in-the-loop simulations of the towing system in the marine vessel.A mathematical model of the electro-hydraulic loading system was presented herein.The relationship expression between the wire-rope stiffness and the loading force was derived from the results of experiments.Through the analysis of the effect of the wire-rope stiffness on the performance of the loading system and the design of the controller,it is concluded that the frequency width minifies and hysteresis increases with the wire-rope stiffness decreases.Then a variable gain feed-forward compensation controller was designed.Experimental results show that this method can improve force tracking accuracy of the system.The paper provides a theoretical basis for high performance electric hydraulic loading system controller design with variable stiffnesses.
electro-hydraulic loading system;wire-rope stiffness;composite controller;input feed-forward
2013-09-03
TH137DOI:10.3969/j.issn.1004-132X.2015.02.011
傅曉云,男,1970年生。華中科技大學機械科學與工程學院副教授。主要研究方向為氣動、液壓控制技術。獲教育部科技進步一等獎1項。發表論文20余篇。賀向宗,男,1988年生。華中科技大學機械科學與工程學院碩士研究生。李寶仁,男,1962年生。華中科技大學機械科學與工程學院教授、博士研究生導師。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
