智能炒菜機器人中的電機控制系統(tǒng)設(shè)計
2015-10-29 01:18:50黃建杰紀金燦萬偉鋒許錦標廣東工業(yè)大學廣東廣州510000
中國科技縱橫 2015年11期
黃建杰 紀金燦 萬偉鋒 許錦標(廣東工業(yè)大學,廣東廣州 510000)
智能炒菜機器人中的電機控制系統(tǒng)設(shè)計
黃建杰紀金燦萬偉鋒許錦標
(廣東工業(yè)大學,廣東廣州510000)
針對智能炒菜機器人中直流電機的正反轉(zhuǎn)控制及速度調(diào)節(jié),提出可行方案;并基于絕對值編碼器,設(shè)計電機的位置檢測系統(tǒng)。炒菜機器人的下位機執(zhí)行機構(gòu)主要分為火候控制和動作控制兩個模塊,動作由直流電機實現(xiàn),本文主要介紹炒菜機器人的電機控制模塊,分動作控制與位置檢測兩部分。
智能炒菜機器人直流電機絕對值編碼器
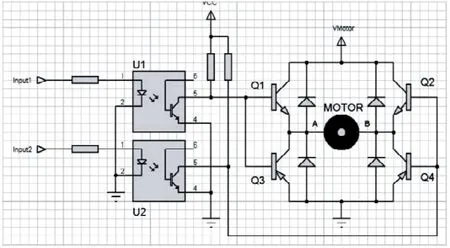
圖1 電機正反轉(zhuǎn)控制電路
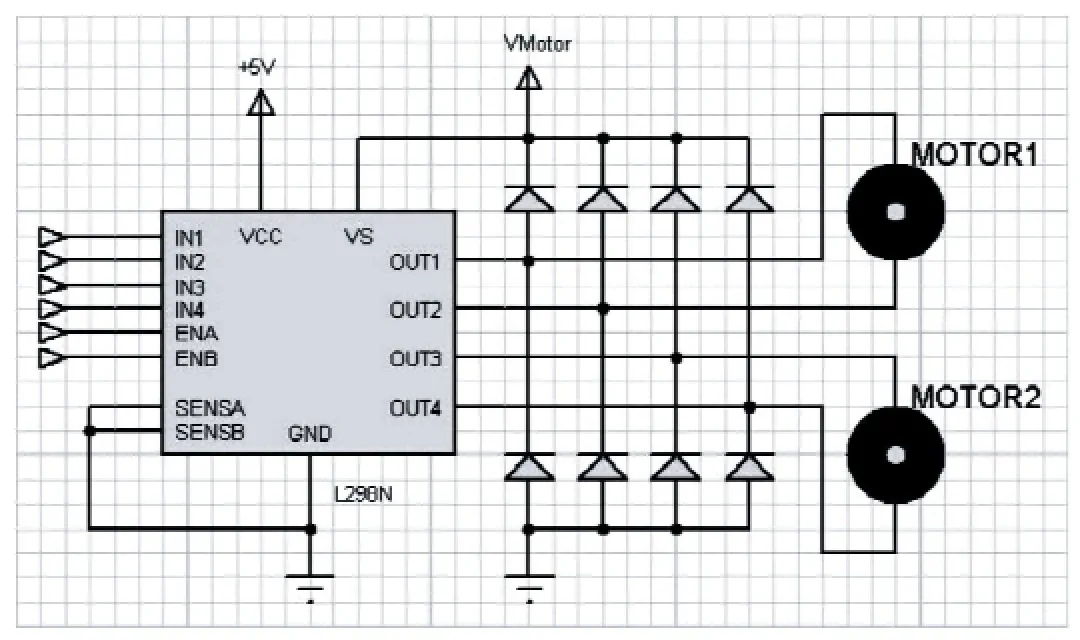
圖2 基于L298N的電機正反轉(zhuǎn)控制電路
本項目中的智能炒菜機器人是一臺可編程控的中式菜肴烹飪機器,能夠支持vmmda1.0通用菜譜指令。用戶可以直接調(diào)用機器內(nèi)部數(shù)據(jù)庫中存儲的大量中式菜肴菜譜程序,也可以通過網(wǎng)絡(luò)接收外部的菜譜程序,還可以根據(jù)喜好自行編寫和修改菜譜程序。炒菜機器人CPU對菜譜程序進行解讀,并控制執(zhí)行機構(gòu)作出響應(yīng),使炒菜機器人具備了自動加熱、下料、翻炒、調(diào)味、裝盤、出菜、洗鍋等功能。
1 電機動作控制方案

圖3 編碼器輸出電路

表1 L298N控制方式及直流電機狀態(tài)表

表2 光洋TRD-NA1024NW絕對值編碼器接線表
炒菜機器人在使用過程中的主要機械動作有兩個:一是各部件的運動及復位,這涉及到電機的正反轉(zhuǎn)控制;二是不同的菜式翻炒的頻率不同,這涉及到電機速度的調(diào)節(jié)。
1.1電機正反轉(zhuǎn)控制方案
直流電機一般有兩個端口,當一個端口接工作電壓另一個端口接地時,電機正轉(zhuǎn),反之則電機反轉(zhuǎn)。可通過圖1 所示電路來實現(xiàn)對電機正反轉(zhuǎn)的控制。
如圖1,當Input1輸入高電平,Iuput2輸入低電平時,光電耦合開關(guān)U1閉合,則三極管Q1截止,Q3導通,電機A端接地;U2斷開,Q2導通,Q4截止,電機B端接工作電壓。因此電機反轉(zhuǎn)。當Input1輸入低電平,Iuput2輸入高電平時,U1斷開,則三極管Q1導通,Q3截止,電機A端接工作電壓;U2閉合,Q2截止,Q4導通,電機B端接地。因此電機正轉(zhuǎn)。
還可以使用電機驅(qū)動芯片來控制電機的正反轉(zhuǎn),比如ST公司生產(chǎn)的L298N。圖2 是基于L298N的電機正反轉(zhuǎn)控制電路。
L298N可控制兩臺直流電機,其中IN1、IN2、OUT1、OU2、ENA為第一組引腳,IN3、IN4、OUT3、OU4、ENB為第二組引腳。控制方式及直流電機的狀態(tài)對應(yīng)如表1 所示。
1.2電機速度調(diào)節(jié)方案
直流電機的速度調(diào)節(jié)可采用由單片機產(chǎn)生的脈沖寬度調(diào)制(PWM)信號。在圖1 的方案中,Input1和Input2各接一個PWM信號源,分別為PWM1和PWM2。若要電機正轉(zhuǎn),則PWM1開啟,PWM2設(shè)為最小值(或?qū)⑵潢P(guān)閉,操作引腳為低電平),由PWM1來對電機調(diào)速。若要電機反轉(zhuǎn),則PWM1設(shè)為最小值(或?qū)⑵潢P(guān)閉,操作引腳為低電平),PWM2開啟,由PWM2來對電機調(diào)速。在圖2 的方案中,ENA和ENB可分別連接兩個PWM信號源,控制兩臺直流電機。針對炒菜機器人中所使用的PIC16系列單片機,PWM模塊的設(shè)置程序如下:
void PWM1_Init()
{
TRISC2=0; //脈寬調(diào)制輸出引腳,設(shè)置為輸出。PR2=0xFF; //脈寬調(diào)制波形的周期。
CCPRIL=0x7F; //脈寬調(diào)制波形的占空比。
CCP1CON=0x3C; //CCP1模塊工作在PWM模式,占空因數(shù)低兩位為11。
T2CON=0x04; //打開TMR2,且前后分頻值為1:1,同時開始輸出PWM。
CCP1IE=0; //關(guān)中斷。}
2 電機位置檢測方案
在智能炒菜機器人的控制系統(tǒng)中,各部件會響應(yīng)上位機發(fā)來的指令,做出翻轉(zhuǎn)、擺動、平移等動作。每一個動作的幅度都是有具體要求的,同時也應(yīng)該保證機器安全運行,因此,需要引入電機位置檢測系統(tǒng)。
2.1絕對值編碼器
電機的位置可通過旋轉(zhuǎn)編碼器來檢測,本項目中采用了光洋公司生產(chǎn)的1024線絕對值光電編碼器,型號為TRD-NA1024NW。其引腳接線要求如表2所示。
本型號編碼器有10根輸出引腳,可向單片機傳送一組十位格雷碼。電機的軸承與編碼器的軸承按一定標準通過齒輪連接,因此,炒菜機器人每一部件的動作幅度都可以被1024等分,每一刻度都對應(yīng)一個唯一的十位格雷碼,上位機可通過這個格雷碼來確定電機的位置。
2.2格雷碼
在一組數(shù)的編碼中,若任意兩個相鄰的代碼只有一位二進制數(shù)不同,則稱這種編碼為格雷碼。在實際電路中,多位狀態(tài)的變化不可能絕對同時發(fā)生,容易出現(xiàn)讀數(shù)錯誤,因此絕對值編碼器要采用格雷碼。上位機接收到格雷碼后,要將其轉(zhuǎn)換為二進制數(shù),轉(zhuǎn)換公式為:Bi=Gi⊕Bi+1,(n-1≥i≥0)
B為二進制數(shù),G為格雷碼。轉(zhuǎn)換公式含義為,從格雷碼的左邊第二位Gn-1起,將每位Gi與其左邊一位Gi+1解碼后的值Bi+1異或,作為該位解碼后的值Bi(取初始最高位Bn為0)。因此,可編寫轉(zhuǎn)換程序如下:
unsigned int GrayToBinary(unsigned int g)
{
unsigned int b;
while(g=g>>1)
b=b^g;
return b;
}
2.3輸出電路
本型號編碼器的輸出形式為集電極開路輸出,直接連接單片機引腳時輸出電平不確定,因此必須接5V電源,且輸出線到5V電源之間接一個1K~4.7K的上拉電阻,如圖3 所示。
3 結(jié)語
智能炒菜機器人在運行過程中需要作出下料、翻炒、調(diào)味、裝盤、出菜、洗鍋等動作,這些動作的實現(xiàn)都離不開電機的控制與檢測。本文中針對直流電機的控制與調(diào)速提出了兩個可行的方案,也提出了一個基于絕對值光電編碼器的電機位置檢測方案。
[1]許錦標,何光.可編程控智能炒菜機:中國,CN201310064095.9[P].2013-6-5.
[2]庹朝永.基于單片機的直流電機PWM調(diào)速系統(tǒng)設(shè)計與開發(fā)[J].煤炭技術(shù),2011(6):62-63.
[3]張紅娟,李維.基于PIC單片機的直流電機PWM調(diào)速系統(tǒng)[J].機電工程,2005(2):10-12.
[4]韓軍,周鏡平.基于PIC單片機的直流電機控制器研究[J].制造業(yè)自動化,2011(2):147-149.
[5]馮友誼,程軍.絕對式編碼器編碼碼制的設(shè)計[J].山西電子技術(shù),2008(1):43-44.
[6]李君成.格雷碼(Gray)和二進制碼的快速轉(zhuǎn)換方法[J].安徽廣播電視大學學報,2001(3):85-87.
positive control and speed regulation for DC motor intelligent cooking robot, and put forward feasible scheme; and based on the absolute value encoder, position detection system design of the motor. The lower position machine cooking robot actuator mainly consists of a fire control and motion control of two modules, the realization of the action by the DC motor, this paper mainly introduces the motor control module cooking robot, is divided into two parts in motor control and position detection.
intelligent cooking robot DC motor absolute encoder
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41