空間機器人路徑規劃綜合優化方法
2015-10-28 02:17:48金宗耀譚春林
航天器工程 2015年2期
金宗耀 譚春林
(北京空間飛行器總體設計部,北京 100094)
空間機器人路徑規劃綜合優化方法
金宗耀 譚春林
(北京空間飛行器總體設計部,北京 100094)
執行復雜操作的空間機器人常具有冗余自由度,從而可以在執行任務過程中通過關節參數的合理規劃對指定目標進行優化。振動和操作靈活性是評價空間機器人性能和任務完成質量的兩項重要指標,而關節力矩的大小是影響振動的重要因素。文章提出了一種路徑規劃綜合優化方法,在對機器人末端運動速度進行優化處理的基礎上,利用其冗余自由度,對關節力矩和評價操作靈活性的條件數指標進行綜合優化。以平面3自由度機器人為對象建立數學模型,并在零重力環境下對相同任務進行數學仿真。仿真結果顯示,采用文章優化方法,關節力矩與操作靈活性指標均得到了有效優化,驗證了所提出方法的有效性。
空間機器人;冗余自由度;路徑規劃;綜合優化
1 引言
空間機器人由于經常要在復雜任務約束下執行操作,因此多具有冗余自由度。具有冗余自由度的機器人在執行相同任務操作時,可以選擇不同的路徑規劃方案,從而能同時滿足多種約束條件,或者能有選擇地優化運動過程中的多項指標[1]。其中,關節力矩(對振動有重要影響)和操作靈活性,是經常優先考慮的兩個指標,尤其對于大型空間機器人,其本體的柔性不可忽略,在路徑規劃時對上述兩項指標進行優化的結果將直接影響任務完成的質量。目前,機器人路徑規劃優化方法研究多集中在對運動學、動力學的單目標優化效果提升[2],或者僅針對運動學問題的多目標優化[3-4],以及對動力學問題的多目標優化上[5],而對運動學與動力學目標綜合優化問題的研究較少,且已有的研究在優化過程中容易出現優化目標相互影響、顧此失彼的情況[6]。
本文提出了路徑規劃時的一種運動學與動力學綜合優化方法,從末端速度和零空間向量出發,對機器人完成任務過程中的關節力矩與操作靈活性評價指標進行綜合優化。通過計算仿真,對比了同一仿真模型在零重力空間環境下完成相同任務時未優化和采用本文優化方法的仿真結果,證明了本文方法的有效性。
2 仿真對象及其數學模型
仿真對象設定為一個平面3自由度機器人,末端只跟蹤平面2自由度位置向量,因此具有一個冗余自由度,對象示意圖及坐標系如圖1所示。由于冗余自由度機器人路徑規劃原理與方法相同,因此本文仿真模型驗證的原理與方法可以推廣到多自由度大型冗余空間機器人。
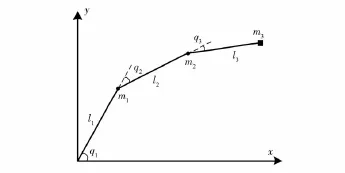
圖1 平面三自由度機器人Fig.1 Planar 3-DOF robot
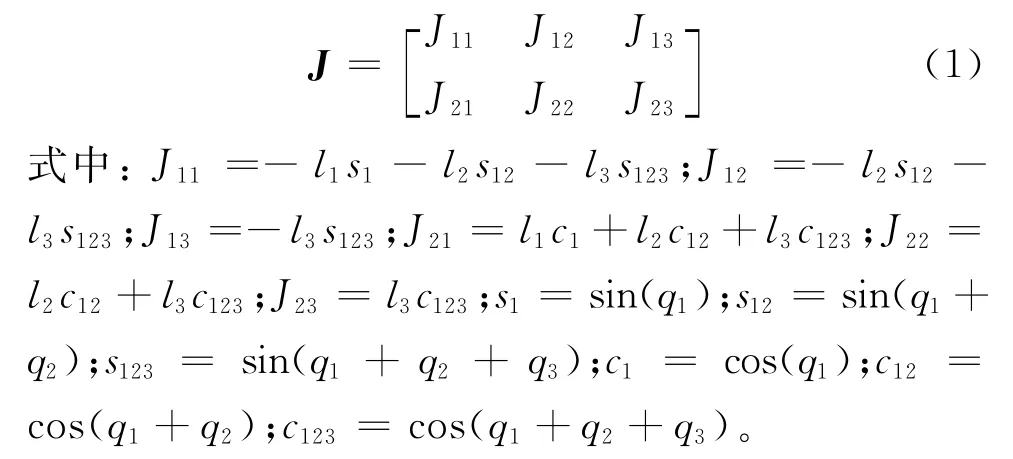
圖1中:l1,l2,l3是機器人3個臂桿的長度,均為1 m;假設機器人臂桿質量為零,其質量全部集中在關節末端,末端質量分別為m1,m2,m3,均為1 kg;q1,q2,q3分別為3個關節的運動角度。由此,可得機器人的雅克比矩陣為
由于本文以關節力矩和操作靈活性為綜合優化目標,操作靈活性優化模型可以由關節速度推導,而利用冗余自由度對關節力矩優化則必須通過關節加速度進行推導,因此要建立仿真對象模型與關節加速度的數學表達,以便建立的目標優化數學模型同時適用于關節力矩優化與操作靈活性優化。冗余自由度機器人的速度方程為

式中:χ為末端位置坐標;q為關節角度向量。
將式(2)對時間求導[7],得到關節加速度為


式中:J+為雅克比矩陣的廣義逆矩陣;I為單位矩陣;φ為方程數域中的任意向量,下文利用對φ的合理選取以及對末端速度的合理優化,達到對機器人關節力矩與操作靈活性綜合優化的目的。
3 優化目標與綜合優化方法數學模型
3.1 關節力矩優化
對于具有一定柔性的機器人來說,操作時所產生的不必要振動,往往對執行任務產生不利影響。關節力矩的大小及關節力矩曲線的平滑性,會對產生的振動有重要貢獻,因此在執行相同任務時,減小機器人關節力矩并使力矩變化平緩,可以對抑制振動產生積極影響。
本文從兩個方面優化機器人在執行任務時所需要的關節力矩。一是對機器人末端速度規劃進行優化;二是利用冗余自由度對關節力矩采取限制措施,從而在保證完成相同任務的同時減小機器人操作所需的關節力矩。這樣就可以在得到更小的任務操作關節力矩的同時,提高力矩曲線的平滑性。
3.1.1 末端速度優化
對于在相同時間內末端運行相同軌跡的機器人,通過對末端運動速度的合理規劃,能夠優化機器人關節力矩變化的平滑性和峰值的大小[8]。本文采用由拋物線過渡梯形速度規劃方法處理末端運行路徑,從而達到上述效果。
設運動軌跡起點時刻和終點時刻分別為0和tf,加速段和勻速段分別經歷時間ta和ts,減速段和加速段對稱。加速段和減速段都分為加速度增加、加速度不變、加速度減小3個過程,加速段過渡點分別為ta/3,2ta/3,ta,減速段與加速段對稱。方法中規定在加速段和減速段各過渡點處速度、速度曲線斜率均相等,同時在0,ta,ta+ts,tf處斜率為零,從而保證速度曲線的平滑。由此,可以得到速度曲線方程,其中加速段的速度方程為
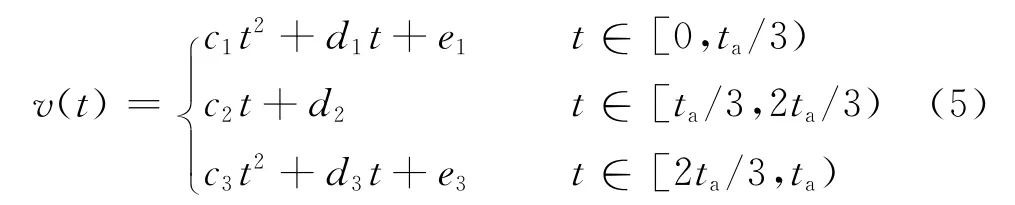
式中:c1,c2,c3,d1,d2,d3,e1,e3表示為了求取平滑曲線方程的暫定未知數。
勻速段的速度方程為

式中:υ3為勻速段速度。
減速段與加速段對稱,其加速度方程可根據上述約定對速度方程求導得到。通過推導,可以得到平滑的末端速度規劃曲線,從而使機器人在執行相同任務時關節力矩變化平緩,且能夠部分減小峰值力矩。
3.1.2 利用冗余自由度優化關節力矩
本文采用Lagrange乘子方法利用冗余自由度對關節力矩優化,用極小化函數推導關節力矩極小化數學表達式。首先,模型中關節力矩的數學表達式為

式中:D為力矩系數矩陣;h為耦合項矩陣;G為重力矩陣,此處為零矩陣。
利用極小化函數方法推導關節力矩[2],有
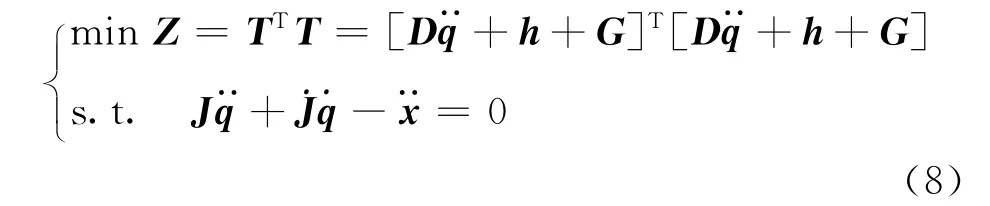
引入Lagrange乘子λ,對式(8)進行整理,得

對式(9)中的Z進行極小化處理,得

式中:考慮機器人工作在零重力環境,JB=B—1JT·(JB—1JT)—1;B=D2;A=—2Dh。
為了改善方法的穩定性,用廣義逆矩陣J+代替式(10)中的整理得

式(11)即為利用Lagrange乘子法推導的關節力矩極小化數學表達式。
3.2 操作靈活性優化
操作靈活性是衡量機器人在完成任務同時其位姿是否有利于下一步任務操作的指標,目前已有多種評價指標。本文采用文獻[7]中提出的雅可比矩陣的條件數k衡量操作靈活性能量。對于冗余自由度機器人,條件數k定義為k(J)=‖J‖‖J+‖,k越接近1,矩陣性態越好,操作靈活性越好;k越大,矩陣越趨于病態,操作靈活性越差[10]。
本文采用對雅克比矩陣J的最小奇異值σm(J(q))進行優化的方法來達到改善條件數的目的。在此取最小奇異值為待優化函數,設

對雅克比矩陣進行奇異值分解并取其梯度,有

式中:um和vm分別為左、右酉矩陣。
所以有

式中:i=1,2,3。
則最小奇異值的梯度優化函數為

▽H(q)即為滿足條件數評價方法的操作靈活性梯度函數,將其代入式(4)的數域內任意向量中,由梯度函數的數學原理可知,該函數項可以在方程中控制最小奇異值,從而降低條件數。
3.3 綜合優化方法數學模型
本文希望在優化機器人路徑規劃的同時,對關節力矩與操作靈活性進行綜合優化。第3.1和3.2節中分別推導了關節力矩優化的表達式和最小奇異值的梯度函數。式(11)與式(4)的數學表達形式相同,所以式(11)中0.5·(D2)—1A部分是方程通解中對數域中任意向量的一種選擇,又由上述推導可以得到,選擇的這個特殊向量可以使關節力矩達到最小。為了達到關節力矩與操作靈活性兩個目標綜合優化的目的,犧牲一部分力矩優化效果[11],在其中加入對操作靈活性優化的數學表達,并通過合理選取比例系數,就可以達到關節力矩與操作靈活性綜合優化的目的。其具體數學表達式為

式中:f為任意系數。
4 仿真分析
在仿真分析中,將機器人的任務均設定為在10 s的時間內,末端由初始位置(2,0)運動到終點位置(1,1),對此任務進行兩組仿真。在未優化組仿真中,末端速度采用基本的梯形曲線進行規劃,且不對關節空間向量進行優化。在優化組仿真中,對笛卡爾空間的末端速度采用式(5)、式(6)中的平滑過渡曲線進行規劃,對關節空間向量采用式(16)中的關節力矩與操作靈活性綜合優化方法,其中f取為
1.2。仿真結果見圖2~圖5。
由圖4可得:優化組仿真獲得的3個關節的峰值力矩,比未優化組仿真的分別降低了約20%、30%、5%,并且力矩變化的平緩程度有所優化。由圖5可得:優化組仿真獲得的條件數在機器人任務執行過程中70%的時間里低于未優化組仿真獲得的條件數,兩者最多相差12%。
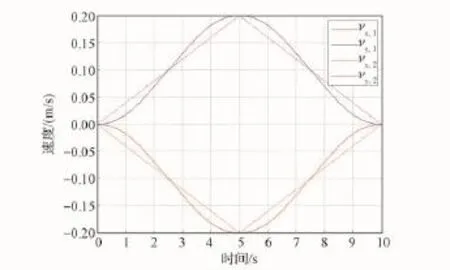
圖2 末端速度Fig.2 Velocity of end-effector
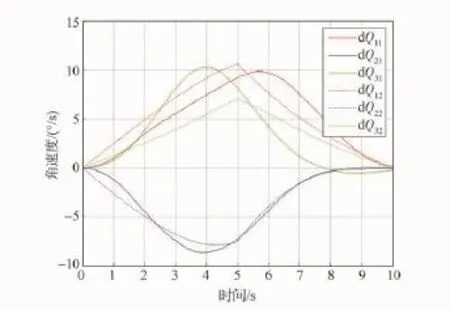
圖3 關節速度Fig.3 Velocity of joints
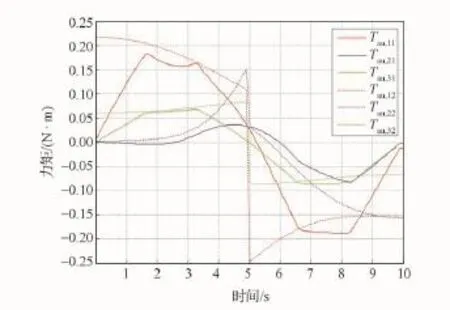
圖4 關節力矩Fig.4 Torque of joints

圖5 條件數Fig.5 Condition numbers
5 結束語
針對大型空間機器人在執行復雜任務時經常面對復雜任務約束,并需要對多類目標進行優化的應用背景,本文選取其中實用程度較高的關節力矩和操作靈活性為優化目標,提出了一種路徑規劃的綜合優化方法,并配合機器人末端速度平滑規劃方法,以平面3自由度機器人為對象,進行了仿真分析。通過對比在零重力仿真環境下,同一模型在執行相同任務時采用本文的優化方法與不進行優化的運動路徑及其相關參數仿真結果,可以證明,本文的方法能夠同時對機器人的關節力矩與操作靈活性產生優化效果。本文的仿真對象及數學模型建立所應用的基本原理與數學理論具有通用性,因此本文方法在同類空間機器人運動路徑規劃中具有通用性。
(
)
[1]熊有倫.機器人學[M].北京:機械工業出版社,1993 Xiong Youlun.Robotics[M].Beijing:Mechanical Engineering Press,1993(in Chinese)
[2]Lee Heow Pueh.Motions with minimal joint torques for redundant manipulators[J].ASME Journal of Mechanical Design,1993,115(3):599-603
[3]余躍慶,劉林濤.多冗余度柔性機器人運動規劃[J].機械科學與技術,2003,22(4):588-590 Yu Yueqing,Liu Lintao.Kinetic planning of hyper redundant robot[J].Mechanical Science and Technology,2003,22(4):588-590(in Chinese)
[4]Kazuya Yoshida.Zero reaction maneuver:flight validation with ETS-VII space robot and extension to kinematically redundant arm[C]//Proceedings of IEEE International Conference on Robotics and Automation.New York:IEEE,2001:441-446
[5]胥宏,張緒平,余躍慶.冗余度柔性機器人動力規劃研究[J].設計與研究,2002,31(5):27-29 Xu Hong,Zhang Xuping,Yu Yueqing.Dynamic planning research of flexible and redundant robot[J].Design and Research,2002,31(5):27-29(in Chinese)
[6]孫奎,謝宗武,劉宏,等.梯度投影法多性能準則優化的應用研究[J].控制與決策,2007,22(12):1433-1440 Sun Kui,Xie Zongwu,Liu Hong,et al.Application of gradient projection method for multi-target optimization[J].Control and Decision,2007,22(12):1433-1440(in Chinese)
[7]陸震.冗余自由度機器人原理及應用[M].北京:機械工業出版社,2007 Lu Zhen.Theory and application of redundant robot[M].Beijing:Mechanical Engineering Press,2007(in Chinese)
[8]陳偉海.冗余自由度機器人優化控制研究[D].北京:北京航空航天大學,1996 Chen Weihai.Optimization control study of redundant robot[D].Beijing:Beihang University,1996(in Chinese)
[9]Hollerbach J M,Suh K C.Local versus global optimization of redundant manipulators[C]//Proceedings of IEEE International Conference on Robotics and Automation.New York:IEEE,1987:619-624
[10]Dubey R V,Euler J A.An efficient projection optimization scheme for a seven-degree-of-freedom redundant robot with spherical wrist[C]//Proceedings of IEEE International Conference on Robotic and Automation.New York:IEEE,1988:28-36
[11]Kazerounian K,Nedungadi A.An alternative method for minimization of the driving forces in redundant manipulators[C]//Proceedings of IEEE International Conference on Robotic and Automation.New York: IEEE,1987:1791-1706
(編輯:夏光)
Multi-objectives Optimization Method for Path-planning of Space Robot
JIN Zongyao TAN Chunlin
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Space robots for complicated missions are usually redundant,so they can finish missions with different selection of joints parameters to fulfill different optimization objectives.Vibration and flexibility of movement are two important criteria for evaluating performance of space robots,and magnitude of joints torque is an important factor which can affect the vibration.For path-planning this paper proposes a method which can simultaneously optimize joints torque and condition number,based on the optimization of the velocity of robot end and by employing the redundant DOF(degree-of-freedom)of robot.A strategy for smoothing the velocity curve of end-effector is also employed in this method.A simulation study is conducted in this paper.In this study,the simulated subject is a planar 3-DOF robot in zero-gravity environment,a mathematical model is established and two results of the same mission with different path-planning are presented.By contrasting their results,effectiveness of the proposed method is proved,including the optimization of torque and condition number.
space robot;redundant degree-of-freedom;path-planning;multi-objectives optimization
TP24
A DOI:10.3969/j.issn.1673-8748.2015.02.006
2014-02-07;
2014-03-10
國家重點基礎研究發展計劃(973計劃)(2013CB733000)和裝備預先研究項目“航天器在軌服務技術”(617010105)
金宗耀,男,碩士,研究方向為航天器機械總體設計、空間機器人技術。Email:jzyyzr@126.com。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
