應用三向測量數據的深空探測器實時濾波定位算法
2015-10-28 02:17:45淡鵬李恒年李志軍
航天器工程 2015年2期
淡鵬李恒年李志軍
(1宇航動力學國家重點實驗室,西安 710043)(2西安衛星測控中心,西安 710043)
應用三向測量數據的深空探測器實時濾波定位算法
淡鵬1,2李恒年1李志軍2
(1宇航動力學國家重點實驗室,西安 710043)(2西安衛星測控中心,西安 710043)
三向測量數據是深空探測器的一類重要觀測數據,文章采用不敏卡爾曼濾波(UKF)算法實現了應用三向測量數據的深空探測器實時濾波定位計算,給出了三向測量體制下的觀測模型及觀測預測值計算方法,建立了動力學及非動力學兩種方式下的濾波預測模型。利用嫦娥三號探測器的實測數據對算法進行了有效性驗證,結果表明,文章所給出的觀測及預測模型建立方法,適用于三向測量數據,動力學建模算法的穩定性與抗野值能力優于非動力學建模算法,但復雜度又高于非動力學建模方法。上述研究結果對深空探測器的定位或定軌計算具有一定的參考價值。
深空探測器;三向測量數據;實時濾波;定位算法
1 引言
在深空探測器定位數據源中,除了常用的甚長基線干涉測量(VLBI)[1]數據外,利用擴頻及S頻段統一測控(USB)設備獲得的外測測量值也是一類重要的觀測數據。由于深空探測任務中電磁波傳播時延較長[2],以及地球自轉等因素影響,測站有時無法接收到對應的發射信號,使得傳統的雙向測距體制應用受限,這時就須要通過不同測站的收發進行外測距離及距離變化率的測量。另外,深空目標的擴頻及USB外測測角數據精度較差,在定位計算中較少使用,此時就要通過3個測站的測距來幾何確定探測器的位置,此種情況一般采用主站發射上行信號,經應答機相干轉發后,兩個副站及主站同時接收下行信號的方式進行距離測量。在深空任務中,將這種通過一個測站發送上行,另一個測站(或多個測站)接收下行信號進行距離測量的體制稱作三向測量,而將一個測站自發自收測量的情況稱作雙向測量[3]。
三向測量數據的測量元素包括三向測距(距離和)及三向測速(距離和變化率),是深空探測的一類重要的觀測數據,在國內外的深空探測任務中有著廣泛的應用,如美國NASA在“阿波羅”飛船落月過程中對三向數據的使用[4],以及我國嫦娥三號探測器的三向測量應用等。文獻[5]對三向多普勒數據建模,并將其應用到軌道確定計算中。目前,深空三向測量數據在實時定位計算中的應用,多集中于幾何計算方法(計算原理類似于三站單程測距幾何定位),其應用受幾何關系制約,且受數據野值影響大,從而會影響位置曲線的光滑度。為解決上述問題,本文將卡爾曼濾波方法引入三向測量數據定位計算中,并以嫦娥三號探測器飛行背景為例,給出了不同方式下的濾波定位算法及計算結果。
2 實時定位算法
卡爾曼濾波是非線性系統估計[6]的一種有效解決途徑,在實時定位計算中有著廣泛的應用。其包含了多類不同的濾波算法,如應用較廣的擴展卡爾曼濾波(EKF)、不敏卡爾曼濾波(UKF)、容積卡爾曼濾波(CKF)和粒子濾波(PF)等。其中,UKF算法以采樣變換為基礎,采用卡爾曼濾波框架,對數據點進行確定性采樣,而不必直接對函數進行線性化處理,因而具有實現過程簡單、避免繁瑣的雅可比矩陣求導計算、收斂速度較快和對噪聲適應能力強等特點,是實時濾波軌道計算中使用較多的一種方法,因此本文計算中采用這種算法。
UKF算法[7]計算過程包含采樣點計算、狀態及觀測預測、均值與協方差更新和狀態更新等步驟,提供了一個通用計算框架,使用時要根據應用背景、觀測值類型等對狀態及觀測模型進行具體設計。考慮到深空探測器飛行過程復雜(如嫦娥三號探測器包括了中途修正、近月制動、動力下降等多個階段),有時較難進行動力學建模,本文在應用三向測量數據進行UKF濾波計算的過程中,狀態外推模型的建立分別采用了動力學建模及非動力學建模的算法。
2.1 三向測量觀測模型及觀測預測值計算
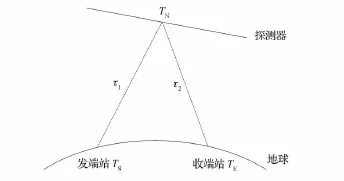
圖1 距離和的測量示意Fig.1 Sketch map for measuring range sum
由于距離和及距離和變化率數據的時標(記為TE)均打在收端站。考慮到電磁波傳播時延,其對應的探測器時間(記為TN)、發端站時間(記為TS)必不相同,濾波計算中須要由探測器飛行的當前狀態X及濾波狀態外推模型進行外推及迭代計算求得。迭代出3個時標后,由信號發端站、信號收端站大地坐標即可計算出兩站分別在TS和TE時刻的地心慣性坐標系位置rS和rE,以及速度矢量又由濾波器狀態外推模型可計算出TN時刻探測器的位置rN和速度這樣就可以得到TE時刻距離和的預測值ρ的表達式。

距離和變化率的預測值為


2.2 動力學建模算法
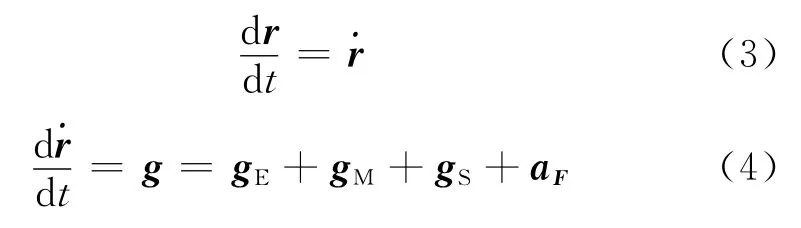
式中:g為總的加速度;gE,gM,gS分別為地球引力、月球引力、太陽引力及光壓攝動力產生的加速度。
根據牛頓力學公式,aF=F/m,求導可得設F在一定時間內保持恒定或為小偏差變化量,則有可得到將其記為b,表示單位質量的質量變化率。由于現階段推力作用是靠質量的減小產生的(消耗燃料產生推力),而即為比沖Isp,進而可推導出,其中的大小,a為加速度大小。據此,可定義濾波計算的系統狀態為X=則可得到軌道機動過程增廣的動力學模型為

對于矢量aF,可由探測器慣性坐標系下的姿態四元數求得本體坐標系到慣性坐標系的轉換矩陣[9](記為M),以及已知的推力方向在探測器本體坐標系的方向矢量(記為Fb),得到慣性坐標系下單位推力矢量aF0=MFb,然后乘上推力加速度大小a求得。
濾波狀態的外推可直接通過對式(5)中的模型進行積分運算完成。
2.3 非動力學建模算法
機動目標濾波跟蹤計算中,常采用純數值擬合及統計方法進行非動力學建模計算,這方面應用較多的目標運動估計模型主要有多項式模型[10]和當前統計模型[11]等。以當前統計模型為例,可定義系統狀態為其中為加速度矢量,則k時刻到k+1時刻的系統狀態外推方程為

式中:Φ(k)為狀態轉移矩陣;U(k)為輸入的狀態矩陣;為當前加速度均值;w(k)為離散白噪聲序列,其相關計算方法參見文獻[11]。
由當前模型算法,狀態轉移矩陣的一種自適應表達式為
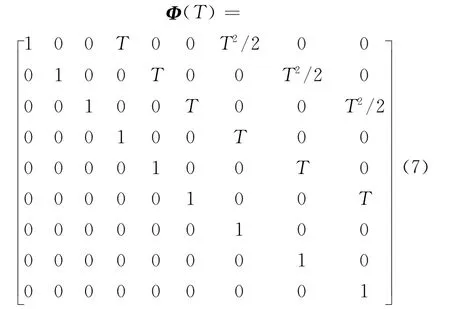
式中:T為數據采樣的時間間隔。
2.4 自適應處理方法
濾波計算往往需要一定的時間進行狀態收斂,在探測器機動過程中,為了更快地響應機動狀態變化的情況,要在UKF計算過程中進行自適應處理。為此,本文在動力學建模及非動力學建模濾波計算過程中采用了以下方法。
(1)根據濾波“新息”[12-13]理論,實現自適應處理要重視“新息”作用,為此,在UKF計算的狀態協方差矩陣(記為PXX)更新中引入漸消因子S(S>1),使得PXX適度放大,達到更重視新數據的作用。修正后UKF中狀態協方差矩陣PXX計算公式為
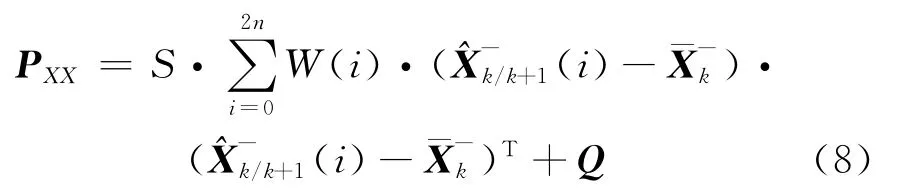
式中:Q為狀態噪聲協方差矩陣;W(i)為第i個采樣點的權值;為第i個采樣點的狀態估計,為狀態預測均值。
(2)工作狀態已知時,可進行適當的干預,如在軌道控制的點火點及熄火點處,對狀態協方差矩陣進行重置,使其快速適應運動加速度突變的情況。
(3)如果濾波器連續多幀出現數據方差檢驗失敗,可認為發生機動,此時采用協方差矩陣重置的方式予以適應。
2.5 算法對比
在應用深空三向測量數據進行實時定位計算中,分別采用動力學建模及非動力學建模的算法進行UKF的狀態模型建立,從式(3)~(7)可見,動力學建模算法是對探測器受力運動的加速度進行建模,而非動力學建模算法直接采用多項式擬合或數據統計的方法進行建模與預估,因而在難以進行受力分析的情況下,動力學建模算法應用常常受到限制,但是因為它的外推模型相對精確,抗野值能力會好于非動力學建模算法。
3 算法驗證及分析
為了驗證算法的可行性,分別使用嫦娥三號探測器中途修正、近月點制動變軌、動力下降過程的實測數據進行濾波計算。
3.1 中途修正計算
對2013年12月3日嫦娥三號探測器中途修正變軌進行濾波計算,此次變軌只有2個測站的雙向測量數據,計算時只使用距離和、距離和變化率兩類觀測量,并采用以下兩種算法。動力學建模算法:進行軌道控制過程的動力學建模,在點火點與熄火點進行狀態協方差矩陣重置,以加強對狀態變化的自適應。非動力學建模算法:采用非動力學建模的當前統計模型進行計算。兩種算法計算的軌道半長軸變化曲線如圖2所示,圖中時間軸給定為相對于點火開始點的秒數。由于非動力學建模算法的濾波發散,計算結果錯誤,因此圖2中未給出對應曲線。
從計算結果來看,少于3個測站時,對于無測角的距離和、距離和變化率觀測數據,此處的動力學建模算法是可行的,能夠得到正確的結果;而非動力學建模算法出現濾波發散問題,計算失敗,其原因在于僅用2個測站的距離和在幾何關系上難以進行定位計算,而動力學建模算法外推模型相對精確,因而對測量元素較少的觀測數據具有較強的適應能力。另外,從圖2中可見,由于使用了自適應處理,在變軌開始點與結束點附近建模算法較好地實現了狀態變化的快速響應。
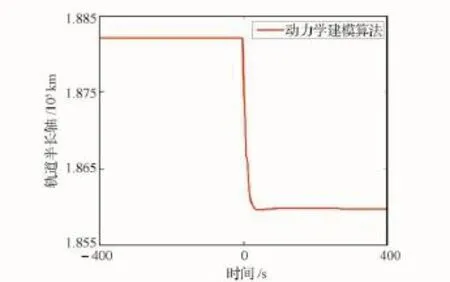
圖2 中途修正變軌半長軸曲線Fig.2 Semi-major axis curve of midway orbit correction
3.2 近月制動過程計算
對2013年12月6日嫦娥三號探測器近月制動變軌(將月球J2000慣性坐標系軌道從雙曲線變為橢圓)時喀什、佳木斯、三亞測站的三向測量實測距離和數據進行濾波,采用動力學建模與非動力學建模算法,計算的軌道偏心率變化曲線如圖3所示(時間軸給定為相對于北京時間17:46的秒數)。
從圖3中看出,兩種算法的結果均反映出了偏心率調整過程(因模型及參數原因,算法結果誤差大小不一致),因而對于3個測站的三向距離和數據,這兩種算法均是可行的,且動力學建模算法曲線的光滑度要好于非動力學建模算法。
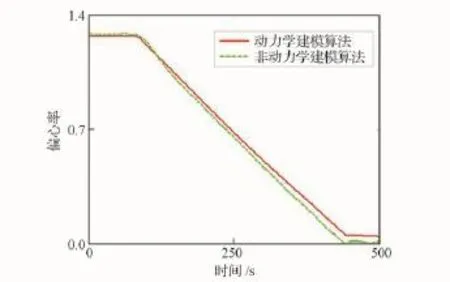
圖3 近月制動變軌偏心率變化曲線Fig.3 Eccentricity curve of perilune orbit controlling
3.3 動力下降過程計算
嫦娥三號著陸器在2013年12月14日成功完成了動力下降及月球軟著陸,使用北京時間21:05—21:13的喀什、佳木斯、三亞測站的三向測量數據(包括距離和及距離和變化率兩種觀測量)進行UKF計算,計算時采用非動力學建模算法的當前統計模型、多項式模型兩種狀態模型進行濾波實現(因為較難進行動力學建模,所以此處不使用動力學建模算法)。濾波計算的著陸器動力下降高度曲線如圖4所示(高程計算時相對月面平均半徑,時間軸采用相對北京時間21:00的秒數)。
從圖4中看出,對動力下降過程三向測量數據濾波,當前統計模型與多項式模型的計算結果相當,兩種結果均是可用的,但受制于實際數據測量及誤差修正的精度,兩種濾波曲線震蕩均較大。對此問題的解決途徑,除了提高數據處理精度外,還可通過引入其他類型的高精度測量數據進行融合濾波實現(如引入激光測高數據等)。另外,21:48后只剩下2個測站對著陸器進行跟蹤,濾波直接發散(圖中未給出)。
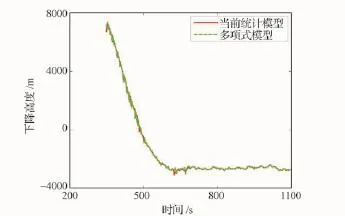
圖4 動力下降高度曲線Fig.4 Height curve of descent to lunar surface
4 結論
本文對應用深空三向測量數據的濾波算法進行了闡述,從嫦娥三號實測數據濾波計算結果可得到以下結論:
(1)對三向測量數據,直接以距離和、距離和變化率作為觀測量的做法是可行的,給出的應用深空三向測量數據的動力學建模及非動力學建模算法是有效的。
(2)采用非動力學建模算法時,計算結果受測量條件影響大,當只有距離和及距離和的變化率,而沒有測角數據時,至少要有3個測站才能正確定位。
(3)對于三向測量數據濾波,動力學建模算法抗野值能力和穩定性要好于非動力學建模算法。
(4)由于雙向測量可認為是三向測量的一種特例,因此本文算法可直接應用于雙向測量計算中。
三向測量數據是深空探測的一類重要觀測數據,但此類數據誤差源較多,數據誤差修正計算將對濾波定位精度產生顯著影響,需要更精確的修正處理,也可通過引入其他觀測量進行狀態約束或融合計算來提高精度。因此,后續的研究重點是數據誤差的精確修正及三向測量與其他各類數據(如VLBI等)的融合計算。
(
)
[1]李金嶺,張津維,劉鸝,等.應用于深空探測的VLBI技術[J].航天器工程,2012,21(2):62-67 Li Jinling,Zhang Jinwei,Liu Li,et al.VLBI technique applied in deep space exploration[J].Spacecraft Engineering,2012,21(2):62-67(in Chinese)
[2]劉嘉興.深空測控通信的特點和主要技術問題[J].飛行器測控學報,2005,24(6):1-8 Liu Jiaxing.Features and main technical issues in deep space TT&C and telecommunication systems[J].Journal of Spacecraft TT&C Technology,2005,24(6):1-8(in Chinese)
[3]黃磊,王宏,樊敏.三向測量技術在深空探測中的應用研究[J].飛行器測控學報,2012,31(3):6-10 Huang Lei,Wang Hong,Fan Min.Application of three-way measurement in deep space exploration[J].Journal of Spacecraft TT&C Technology,2012,31(3): 6-10(in Chinese)
[4]Smith E S,Morinelli P J.Analysis of three-way Doppler tracking data from the Lunar Reconnaissance Orbiter mission[C]//Proceedings of SpaceOps 2010 Conference.Washington D.C.:AIAA,2010:309-318
[5]曹建峰,黃勇,胡小工,等.深空探測中多普勒的建模與應用[J].宇航學報,2011,32(7):1583-1589 Cao Jianfeng,Huang Yong,Hu Xiaogong,et al.Modeling and application of Doppler data in deep space exploration[J].Journal of Astronautics,2011,32(7):1583-1589(in Chinese)
[6]Julier S J,Uhlmann J K.Unscented filtering and nonlinear estimation[J].IEEE Aerospace and Electronic Systems,2004,92(3):401-422
[7]潘泉,楊峰,葉亮,等.一類非線性濾波器——UKF綜述[J].控制與決策,2005,20(5):481-489 Pan Quan,Yang Feng,Ye Liang,et al.Survey of a kind of nonlinear filters—UKF[J].Control and Decision,2005,20(5):481-489(in Chinese)
[8]李恒年,李濟生,黃永宣.有連續推力控制的衛星軌道確定算法[J].系統工程與電子技術,2010,32(9): 1957-1961 Li Hengnian,Li Jisheng,Huang Yongxuan.On-line orbit determinative method for satellites with continuous thrust acceleration[J].Systems Engineering and Electronics,2010,32(9):1957-1961(in Chinese)
[9]李恒年.地球靜止衛星軌道與共位控制技術 [M].北京:國防工業出版社,2010 Li Hengnian.Geostationary satellite orbital analysis and collocation strategies[M].Beijing:National Defense Industry Press,2010(in Chinese)
[10]淡鵬,李恒年,張智斌.一種火箭外測彈道實時重建的自適應濾波算法[J].彈箭與制導學報,2013,33(6): 188-190 Dan Peng,Li Hengnian,Zhang Zhibin.An adaptive Kalman filtering algorithm applied to real-time computing of rocket external ballistics[J].Journal of Projectiles,Rockets,Missiles and Guidance,2013,33(6):188-190(in Chinese)
[11]隋紅波,房曉穎,吳瑛.改進的當前統計模型及自適應跟蹤算法[J].雷達科學與技術,2008,6(3):202-205 Sui Hongbo,Fang Xiaoying,Wu Ying.A modified adaptive tracking algorithm based on current statistic model[J].Radar Science and Technology,2008,6(3):202-205(in Chinese)
[12]周衛東,喬相偉,吉宇人,等.基于新息和殘差的自適應UKF算法[J].宇航學報,2010,31(7):1798-1804 Zhou Weidong,Qiao Xiangwei,Ji Yuren,et al.An innovation and residual-based adaptive UKF algorithm[J].Journal of Astronautics,2010,31(7):1798-1804(in Chinese)
[13]淡鵬,李恒年,張定波,等.基于多元非完備信息的實時濾波定軌方法[J].飛行力學,2014,32(3):283-288 Dan Peng,Li Hengnian,Zhang Dingbo,et al.Realtime filtering orbit method based on multiple incomplete observation[J].Flight Dynamics,2014,32(3): 283-288(in Chinese)
(編輯:夏光)
Real-time Filtering Positioning Algorithm Using Three-way Measurement Data for Deep Space Probe
DAN Peng1,2LI Hengnian1LI Zhijun2
(1 State Key Laboratory of Astronautic Dynamics,Xi'an 710043,China)(2 Xi'an Satellite Control Center,Xi'an 710043,China)
The three-way measurement data is one kind of important observation data for deep space probe.By using this type of data,an algorithm based on UKF(unscented Kalman filter)is presented to calculate real-time position of deep space probe.The observation model and forecast method using three-way measurement are given including the implementation method with dynamic modeling and non-dynamic modeling.Then the measured data of Chang'e-3 are used to test and verify the proposed algorithm.The results indicate that the observation and forecast modeling method is correct and feasible,and that the stability and anti-outliers capability of dynamic modeling are higher than those of non-dynamic modeling,but the dynamic modeling's complexity is high.The algorithm can be as a reference in deep space probe's positioning and orbit determination.
deep space probe;three-way measurement data;real-time filtering;positioning algorithm
V557.1
A DOI:10.3969/j.issn.1673-8748.2015.02.004
2014-03-25;
2014-04-23
國家重大科技專項工程
淡鵬,男,碩士,高級工程師,研究方向為航天器動力學與飛行計算。Email:danpeng@126.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
