數字魚雷的軍事應用及其技術方案
2015-10-24 06:27:48李本昌
水下無人系統學報 2015年6期
李本昌, 李 原
(海軍潛艇學院 軟件中心, 山東 青島, 266042)
數字魚雷的軍事應用及其技術方案
李本昌,李原
(海軍潛艇學院 軟件中心, 山東 青島, 266042)
按照作戰仿真研究和部隊模擬訓練的需要, 針對現代魚雷技術復雜、與其武器系統交互關系密切的實際,提出了數字魚雷的概念和構建數字魚雷的技術要求, 設計了魚雷彈道模型和外界控制模型及接口關系, 采用以型號關聯性能參數、以仿真進程和戰術態勢關聯彈道階段的外彈道仿真設計方法構建了數字魚雷的技術方案。最后應用Visual C++面向對象的程序設計語言給出了一個作戰仿真訓練系統的運用實例, 結果表明, 該方案滿足作戰仿真訓練系統的實時性、準確性和擴展性要求。
魚雷攻擊; 自導方式; 外彈道; 作戰仿真
0 引言
作為一個技術密集、功能設備較多、操作戰位分散、相互協同要求高的水下作戰單元——潛艇, 其戰斗力的形成和提高, 在很大程度上取決于日常訓練。而岸港訓練由于具有安全、經濟、有效的諸多特點, 又成為部隊日常訓練的主要方式和關鍵環節。因此, 按照潛艇裝備實際和特點, 以及其作戰的客觀環境, 建造能夠體現現代裝備技術水平和符合作戰使用客觀背景的仿真訓練裝備是保證新裝備快速形成戰斗力的重要途徑。
隨著技術的發展和多年的開發實踐, 按照裝備的外形尺度乃至其功能, 如潛艇作戰系統內部的指揮關系、所具備的攻防手段、控制關系、主要設備及操作界面等, 構建一型作戰仿真訓練系統并不存在技術難題, 但是, 能否達成逼真的訓練效果, 則完全取決于作戰背景、水文條件, 特別是武器性能的仿真程度。為滿足作戰訓練的需要, 文中提出了數字魚雷的概念, 構建了數字魚雷的技術方案, 并應用于作戰仿真訓練系統中。
1 數字魚雷概念及其軍事應用
所謂數字魚雷, 是指利用數字仿真技術模擬魚雷的作戰功能、技術性能, 及其與發射平臺武器系統交互關系和彈道過程的軟件集合體。
顯而易見, 這種數字魚雷以其構造靈活、組裝簡單的特點, 作為構成潛艇魚雷武器系統的一個仿真部件, 可以按照應用需要, 構成規模大小不等的各種具有實物或純虛擬的模擬仿真系統。以此可應用于兩方面的主要目的。
一是作為作戰仿真系統的組成部分, 用于描述魚雷武器的使用過程和攻擊結果。即應用于包括潛艇魚雷武器系統在內的作戰仿真系統中, 按照用戶的需要, 在一定作戰背景條件下, 完成給定魚雷武器的作戰效能評估、作戰使用方法研究和岸港條件下模擬作戰訓練等。
二是作為潛艇武器裝備的組成部分, 用于海上攻擊訓練或者魚雷武器系統日常保養和維修過程的技術檢查和調試。其中, 前者是利用潛艇作戰系統的實裝資源, 解決海上魚雷攻擊的模擬訓練問題, 即在海上訓練中, 以數字魚雷代替真實魚雷, 在不用實際發射魚雷的條件下模擬潛艇魚雷攻擊過程, 從而保證艇員在真實的崗位和設備上、無需顧及海區客觀條件和撈雷風險的環境中逼真地進行魚雷攻擊訓練; 而后者則是作為魚雷武器系統日常維護的保障條件, 在艇上武器系統檢修和各層次修理過程中為艇員或工程技術人員提供魚雷武器通道的動態調試環境。
2 數字魚雷基本技術要求
不難看出, 上述應用, 特別是用于魚雷武器作戰效能評估、作戰使用方法研究和模擬作戰訓練, 通常都是一個實時性很強、隨機因素很多、戰術情況多變的時間過程。因此, 真實地描述魚雷武器的使用過程和彈道性能是保證這種應用最重要的前提。否則, 不僅不能保證研究或訓練的目的性, 而且還可能造成研究結果的偏離, 甚至對作戰訓練使用方法產生誤導[1]。
隨著魚雷技術的進步, 現代魚雷的功能和性能得到了極大提高, 魚雷和其武器系統的相互依賴關系也越來越密切。這一切不僅使魚雷自身的控制關系以及魚雷與其武器系統之間的交互關系變得越來越復雜, 而且使得體現其作戰性能的彈道過程也變得越來越復雜。所以, 為了滿足上述應用目的, 數字魚雷必須滿足以下基本技術要求。
1) 計算速度要求。依據不同的應用目的, 數字魚雷完成一次仿真計算所需要的時間應有不同的要求, 如果用于統計仿真則其速度越快越能提高效率; 如果用于攻擊訓練仿真, 則應能夠按照自然時間完成真實魚雷的動作進程。所以, 計算速度至少應能滿足實時系統的要求。如果不能保證魚雷與艇上武器系統的實時交互, 以及彈道仿真精度的條件下實時完成計算任務, 就不可能按照自然時間完成作戰過程的仿真。
2) 交互性要求。應能按照發射平臺的攻擊過程完整地模擬魚雷與其武器系統相互之間的控制關系和信息傳遞過程。從本質上來說, 艇上武器系統與魚雷的交互過程就是武器系統對魚雷的控制過程, 所以從魚雷攻擊開始, 就要按魚雷自身固有的功能和性能, 以及魚雷與艇上武器系統的信息協議執行諸如魚雷各系統自檢、慣導調平、參數預設定、線導遙控信息接收及執行等交互過程, 并按協議在這些交互過程中回復相關應答信息和遙測信息。
3) 彈道過程逼真性要求。應能夠按照給定魚雷的技術特點、發射平臺的控制、作戰使用環境、目標特性、戰術態勢和搜索跟蹤程序, 描述魚雷的彈道過程。魚雷彈道是其作戰性能的具體體現,所以能否按照魚雷的技術實際描述魚雷的彈道過程是關乎這種數字魚雷能否滿足應用的關鍵所在。
上述要求可以看出, 采用以往直航魚雷或各種聲自導魚雷的仿真方法很難完整地描述現代魚雷的功能和性能。而且, 僅僅依靠只具有仿真知識的人員, 而沒有魚雷研制的工程技術人員的參與開發, 也不可能“建造”出與實際型號在功能和性能上相一致的數字魚雷。
3 魚雷彈道模型
為了勝任現代作戰任務, 盡管現代魚雷通常集多種制導方式于一身, 使得其彈道過程遠比以往魚雷復雜, 但除了性能參數(魚雷的速度、自導探測能力和機動旋回能力)的差異之外, 各型魚雷的彈道過程無外乎以下幾種主要模型及其組合。
1) 初始機動彈道模型[2]。描述魚雷發射出管到建立起穩定的運動狀態時間之內的航行過程。該過程魚雷的彈道取決于發射管的性能、魚雷自身動力和發射水域的水動力學特性等。
2) 自控駕駛彈道模型[2]。魚雷完成初始機動后, 按照發射系統預先設定的航向, 完成一次轉角, 到直航終了的整個過程。該過程魚雷的彈道軌跡主要取決于發射系統的預先設定和魚雷的機動性能。對于直航魚雷來說是魚雷開始一次轉角到魚雷命中目標或航程耗盡的整個過程; 對于自導魚雷來說是開始一次轉角到魚雷自導開機的過程; 對于線導魚雷則是開始一次轉角到魚雷第1次接受線導遙控指令時間內的過程。
3) 聲自導彈道模型[2]。具有聲自導導引方式的魚雷, 在探測到目標以后轉入自導階段。在自導階段魚雷的自導系統按照一定的導引規律, 以程序的方式控制魚雷跟蹤目標, 并且在魚雷丟失目標時以確定的再搜索方式搜索和跟蹤目標, 直到魚雷命中目標或航程耗盡。
4) 尾流自導彈道模型[2]。末段尾流自導魚雷,在探測到目標尾流后轉入尾流自導階段。在跟蹤目標尾流的過程中, 依據自導裝置檢測尾流的機理不同, 又可分為單波束和三波束制導, 其彈道過程由程序確定。
5) 線導導引彈道模型[3]。線導導引段是魚雷出管并且與平臺發射系統建立起信息聯系之后,由發射平臺對魚雷的遙測與控制過程。在這一過程中, 發射平臺按照一定的導引方法對魚雷實施變深、變速和變向控制。可以看出, 在這一過程中魚雷的彈道是由發射平臺控制的。
6) 反水聲對抗彈道模型[4]。當魚雷發現并識別出所跟蹤的目標是被攻擊目標所釋放的水聲對抗器材時, 魚雷將按照程序彈道進行反水聲對抗的戰術機動與搜索, 魚雷的彈道軌跡或魚雷的反水聲對抗方式取決于水聲對抗器材的類型、目標態勢等。
7) 其他功能彈道模型[2]。為了應對各種特殊情況, 潛射魚雷除了配備接近、搜索、跟蹤目標的彈道之外, 還具備諸如保護發射平臺安全等應對特殊情況的功能彈道。
4 外部控制模型及接口關系
潛射魚雷的發射控制信息主要來源于聲吶這一目標定位精度較低的水聲探測器材, 正是原始信息的不準確性, 使得魚雷發現目標存在很大的隨機性。此外, 目標的位置、運動狀態和作戰海域的水文條件都對魚雷的探測、判斷, 乃至跟蹤和命中產生重要影響。這些都是數字魚雷計算自導作用距離、判斷是否發現或丟失目標, 以及魚雷彈道過程控制的重要依據。所以, 作為數字魚雷的輸入, 外部的仿真系統應建立相應的模型,并通過軟件接口給予提供, 如圖1之虛線方框內。

圖1 數字魚雷仿真模型的基本框架Fig. 1 Frame of digital torpedo simulation model
1) 發射控制進程模型[5]。按照魚雷攻擊的自然過程, 描述武器系統對魚雷的控制。包括從魚雷上電、使用方式和自導方式確定、預設定參數裝訂、線導遙控等, 體現的是艇上魚雷武器系統對魚雷的控制過程和控制方法。
2) 裝訂參數模型[2]。為了提供魚雷彈道的控制條件, 作戰仿真時, 不僅要按照裝備實際提供裝訂參數, 而且這些參數還存在符合潛艇計算目標運動參數和射擊參數誤差分布規律的一定量的隨機誤差。
3) 戰場水文環境模型[2]。作戰海區的水文環境是影響魚雷自導性能的重要因素, 通常這種影響的主要表現是魚雷自導探測距離的不確定性,最終體現在魚雷彈道軌跡的不確定。
4) 目標及其運動狀態模型[6]。目標艦艇的初始狀態、發現魚雷的距離, 魚雷接近目標過程中相對于目標的位置, 以及目標速度及其機動對抗措施都對魚雷的探測和彈道控制產生重要影響。
5 數字魚雷的技術方案構建
由魚雷的彈道模型可以看出, 在需要描述多型魚雷, 而且每型魚雷又具有多種制導方式的仿真環境中, 如果采用過去那種只針對某一特定型號進行仿真, 其仿真軟件將是龐大而復雜的, 遠不能勝任多型魚雷或同型魚雷多種制導方式的應用環境。
為了實現通用性的目的, 在內部結構上必須采用模塊化設計的技術方法。為此, 可將實現魚雷不同功能的代碼分別做成子模塊, 然后把這些子模塊封裝一起構成數字魚雷, 如圖1之實線的方框內。
數字魚雷作為作戰仿真系統的重要組成部分之一, 其運行的時機取決于訓練中魚雷是否發射,所以由仿真訓練系統調用。為了滿足描述不同型號魚雷的需要, 數字魚雷應包含魚雷性能參數庫和彈道模型庫兩個主要部分。
1) 魚雷性能參數庫的構建。魚雷性能參數庫中以數據的形式存儲了需要仿真的魚雷性能參數資料, 如魚雷速度、自導探測性能和航程,以及特殊彈道的控制策略等。為了便于引用可采用關系數據庫, 以使魚雷的性能參數與其型號相關聯。
2) 彈道模型庫的構建。彈道模型庫封裝了魚雷各階段的彈道模型, 其本質是用于解算給定條件下魚雷的彈道軌跡和運動參數(瞬時速度和航向), 所以是彈道仿真的關鍵部分。
其他附屬模型用于描述魚雷彈道的相關附屬模型包括魚雷控制系統精度模型, 描述了魚雷航行過程的各種誤差, 通常是魚雷型號所固有的。
仿真過程中, 仿真訓練系統在魚雷發射后,只需通過傳遞所發射魚雷型號、自導方式和戰術態勢調用數字魚雷。由數字魚雷從模型庫中分別調用相應的子模塊即可達成型號、參數和彈道模型的統一, 進而在具有針對性的“作戰”條件下完成仿真過程模擬和計算。
6 作戰仿真應用實例
采用面向對象的程序設計方法, 為作戰仿真功能的集成奠定了基礎。在具體編程時, 利用Visual C++面向對象設計語言, 各個較大的模型都是以類的形式進行設計, 如目標和潛艇的戰術行為等。在這些專有類的基礎上, 加上一些Visual C++中的用于生成人機界面的通用類, 構成整個仿真程序。圖2給出了作戰仿真訓練系統中各專有類之間的邏輯關系和仿真流程。可以看出, 數字魚雷作為這種應用系統的一個部件, 無需開發者對其內部的仿真問題做任何工作。

圖2 作戰仿真系統流程Fig. 2 Flow chart of operational simulation system
在系統運行過程中, 啟動數字魚雷的時機是由受訓者的攻擊決策結果和魚雷發射后的時間確定的, 作為仿真系統只需在魚雷發射時向數字魚雷提供所發射魚雷的類型、使用方式和預設定參數, 隨后按照系統的仿真周期, 以當前時間、作戰態勢和水文條件, 周期地啟動數字魚雷, 直到魚雷命中目標或航程耗盡。
圖3給出了線導加尾流自導魚雷彈道仿真的局部軌跡, 包括線導導引彈道、自導自適應彈道和三波束尾流自導彈道。仿真軟件不僅滿足動態仿真系統的實時性要求, 而且魚雷彈道仿真精度高、各階段銜接良好。
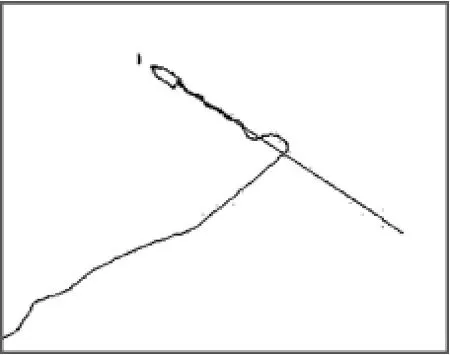
圖3 線導導引和尾流自導跟蹤的仿真示意圖Fig. 3 Simulation example schematic of wire guidance and wake homing tracking
7 結束語
無論在技術上, 還是在戰術使用上, 魚雷武器彈道仿真都是一個十分復雜的系統工程問題。目前, 針對魚雷功能研究的彈道仿真模型相對較多, 而用于戰術仿真、特別是復雜對抗條件下的魚雷彈道仿真模型, 不僅過少, 而且過于簡單,以至于難以體現作戰過程的實際。因此, 在用于作戰使用研究, 或者戰術訓練目的時, 將難以達到貼近實際的效果。文中提出數字魚雷及其技術方案的目的也就在于對這方面工作的探索, 所研究的方法滿足了魚雷型號多、制導方式復雜條件下, 作戰仿真訓練系統對實時性、準確性和擴展性的要求。
[1] 李本昌. 潛艇作戰仿真訓練系統的功能需求與技術實現[J]. 軍事運籌與系統工程, 2002, 61(3): 17-20.
Li Ben-Chang. The Function Requirement and Technical Implement of Submarine Combat Simulation Training System[J]. Military Operations Research and Systems Engineering, 2002, 61(3): 17-20.
[2] 李本昌. 潛射魚雷作戰運用理論與工程[M]. 北京: 國防工業出版社, 2014.
[3] 李本昌. 線導魚雷的速制及其作戰運用[J]. 魚雷技術,2009, 17(4): 74-76.
Li Ben-Chang. Multispeed Application of Wire-guided Torpedo[J]. Torpedo Technology, 2009, 39(4): 74-76.
[4] 謝飛躍. 魚雷對抗假目標的再搜索彈道研究[J]. 魚雷技術, 2003, 11(3): 38-40.
Xie Fei-Yue. A Study of Torpedo′s Re-attacking Trajectory Countering False Targets[J]. Torpedo Technology, 2003, 11(3): 38-40.
[5] 李本昌. 潛射魚雷射擊控制方式及有關問題[J]. 火力與指揮控制, 2012, 37(11): 1-3.
Li Ben-Chang. Submarine Torpedo Weapon Firing Control Mode and Relevant Problems[J]. Fire Control & Command Control, 2012, 37(11): 1-3.
[6] 李本昌, 楊輝, 潛射魚雷的自導方式及機動對抗條件下的運用[J]. 指揮控制與仿真, 2015, 37(1): 1-3.
Li Ben-Chang, Yang Hui. Homing Mode and Application in Counter Condition of Sub-Launch Torpedoes[J]. Command Control and Simuliation, 2015, 37(1): 1-3.
(責任編輯: 許妍)
Military Application and Technical Scheme of Digital Torpedo
LI Ben-Chang,LI Yuan
(Research Centre of Submarine Operation Software, Navy Submarine Academy, Qingdao 266042, China)
According to the needs for operational simulation and military simulation training, this paper proposes a concept of a digital torpedo and its technical requirements by considering the complexity of a modern torpedo and its interaction with weapon system, and builds a torpedo trajectory model and an external control model with interfaces. Moreover, the technical scheme of a digital torpedo is designed by adopting the external trajectory simulation method, in which performance parameter is related to torpedo type, and trajectory stages are related to simulation process and tactical situation. In addition, an application example of an operational simulation training system is programmed with Visual C++. The result shows that the scheme can meet the requirements of real-time, accuracy and expansibility for an operational simulation training system.
torpedo attack; homing mode; external trajectory; operational simulation
TJ630; TP391
A
1673-1948(2015)06-0465-05
10.11993/j.issn.1673-1948.2015.06.014
2015-07-30;
2015-10-14.
李本昌(1955-), 男, 教授, 研究方向為潛艇作戰系統和武器運用.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
