視頻序列中的目標檢測
2015-10-22 16:57:05溫馨武海健袁杰
現代電子技術 2015年19期
溫馨 武海健 袁杰
摘 要: 重點研究視頻序列中運動目標的提取、跟蹤、分類等問題,最終實現了一個完整的目標檢測系統。首先,考慮到算法的復雜度和檢測的實時性需求,優選了背景差與幀差相結合的檢測方法,通過背景實時更新,達到了一個較好的檢測效果。其次,充分考慮了卡爾曼濾波跟蹤的簡單、高效等特性,通過計算當前目標與候選目標之間的歐氏距離來尋找最佳匹配目標和區分相交物體。再者,提出了一種先用Adaboost算法獲得各個目標的初分類,再采用BP神經網絡對目標進行細分類的方法,實踐證明,該方法在保證對絕大部分人、自行車、汽車有很好的分類效果外,對大部分雜物也能有較好的區分。最后,通過Matlab編程,設計并實現了一個完整的運動目標檢測系統。
關鍵詞: 目標提取; 目標跟蹤; 目標分類; 目標檢測系統
中圖分類號: TN919?34 文獻標識碼: A 文章編號: 1004?373X(2015)19?0068?04
Abstract: The extraction, tracking and classification of moving target in video sequence are studied, and a whole target detection system was achieved. Considering the complexity of the algorithm and the real?time requirement of the detection, the detection method combining background difference with frame difference is optimized and selected, and a better detection effect was achieved by updating the background in real?time. Since Kalman filtering tracking is simple and efficient, the Euclidean distance between current target and candidate target is calculated to search for the best matching target and distinguish intersecting target. A novel method is proposed, which applies Adaboost algorithm to acquire the preliminary classification of each target, and makes use of BP neural network to classify the target in detail. The practical results prove that this method can ensure a preferable classification effect to majority of persons, cars and bikes, and distinguish most varia better. An integral detection system of moving target was designed and implemented by Matlab programming.
Keywords: target extraction; target tracking; target classification; target detection system
0 引 言
視頻智能監控是計算機視覺領域中一個重要的研究分支,它以其準確、直觀、實時和捕獲信息豐富被應用于許多場合,關系到社會的安全防范和國家的長治久安。其中,基于圖像序列的運動目標檢測與跟蹤技術是視頻監控領域中的重中之重,也是計算機視覺系統中不可或缺的關鍵技術。近年來,有大量的運動目標檢測算法相繼被提出,目前,常用的運動目標檢測方法可以歸類為:光流法[1?2](Optical Flow)、背景差法[3?4](Background Subtraction)和幀差分法[5?6](Frame Difference)等,其中常用的背景模型包括混合高斯模型[7]、碼本模型[8]等。目標跟蹤系統可被認為是一個線性的、離散的高斯馬爾科夫系統,通過一定的假設與估計,可對目標的狀態方程與觀測方程進行求解,從而達到目標跟蹤的效果。如今研究較為熱門的跟蹤技術有:卡爾曼[9?10](Kalman)濾波跟蹤、均值偏移[11](Mean?Shift)跟蹤、粒子濾波(PF)[12]跟蹤等。運動目標分類的主要目的是對檢測到的前景區域所表示的目標類型進行區分,以備對不同類的目標進行不同的處理。
目前常用的分類方法主要包括神經網絡[13]、Adaboost算法[14]和支撐向量機(SVM)[15]等。本文考慮到視頻監控處理中所應滿足的實時性和精確度要求,分別從運動目標檢測、目標跟蹤、目標分類三個方面進行研究設計,最終檢索并分析出視頻序列中特定目標的數量、顏色、出現和消失時間并生成記錄文件,實現了一個高效的視頻智能監控系統。
1 運動目標檢測
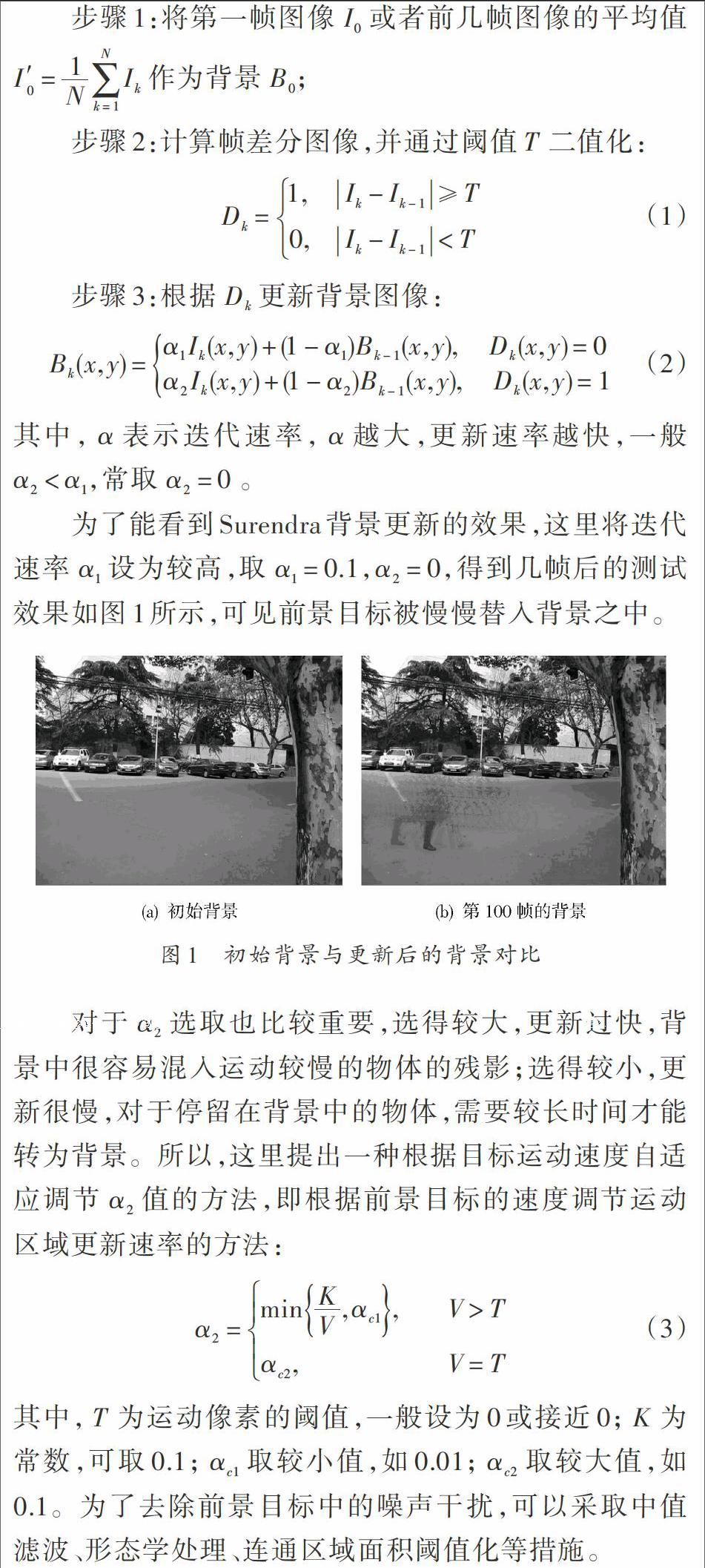
Surendra算法[16]是一種快速自適應的背景更新方法,它通過當前幀與背景幀的差分圖像或者利用幀間差分圖像找到物體的運動區域,并對運動區域的背景部分保持不變,而非運動區域的背景以一定的速率用當前圖像幀中對應的像素值進行替換更新。具體算法可以表述如下:
對于[α2]選取也比較重要,選得較大,更新過快,背景中很容易混入運動較慢的物體的殘影;選得較小,更新很慢,對于停留在背景中的物體,需要較長時間才能轉為背景。所以,這里提出一種根據目標運動速度自適應調節[α2]值的方法,即根據前景目標的速度調節運動區域更新速率的方法:endprint
其中,[T]為運動像素的閾值,一般設為0或接近0;[K]為常數,可取0.1;[αc1]取較小值,如0.01;[αc2]取較大值,如0.1。為了去除前景目標中的噪聲干擾,可以采取中值濾波、形態學處理、連通區域面積閾值化等措施。
2 運動目標跟蹤
運動目標跟蹤技術發展至今,已經出現了很多算法及相應的改進措施,其中絕大多數跟蹤算法都需要經過預測、匹配、更新等過程。本文充分考慮視頻處理的實時性要求,提出了一種利用卡爾曼濾波預測目標運動軌跡,基于歐氏距離尋找匹配目標并判斷目標相交與分離的方法。
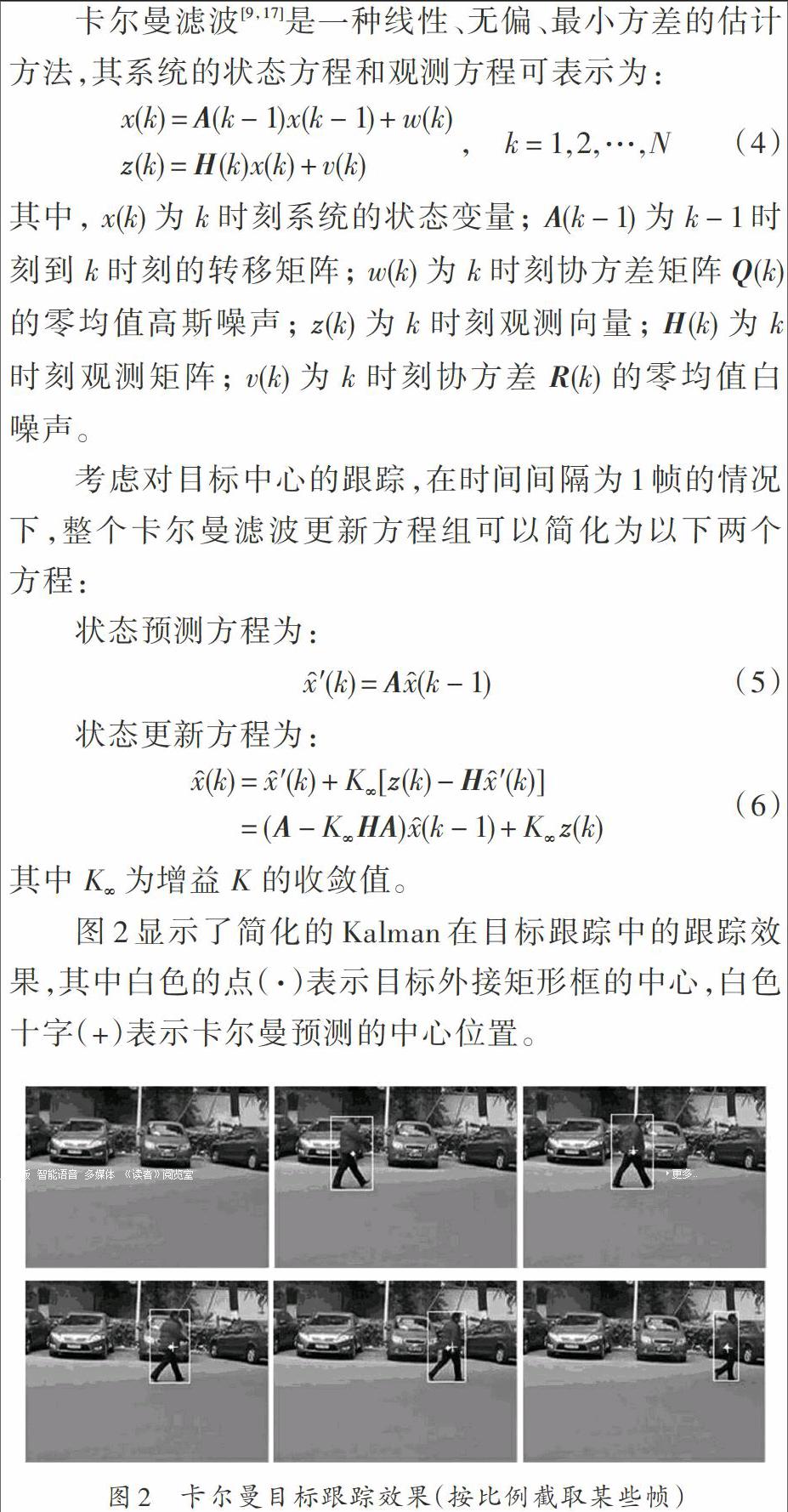
2.1 卡爾曼濾波
其中,[x(k)]為[k]時刻系統的狀態變量;[A(k-1)]為[k-1]時刻到[k]時刻的轉移矩陣;[w(k)]為[k]時刻協方差矩陣[Q(k)]的零均值高斯噪聲;[z(k)]為[k]時刻觀測向量;[H(k)]為[k]時刻觀測矩陣;[v(k)]為[k]時刻協方差[R(k)]的零均值白噪聲。
2.2 基于歐氏距離的運動目標相交檢測
使用卡爾曼濾波器進行目標軌跡跟蹤時,需要使用當前實際值進行狀態更新,而目標相交時,通常很難得到單個目標實際的中心和長寬,故在狀態更新時的實際測量值[z(k)]用預測值[x(k)]的前兩行代替。
在處理運動目標相交時,首先要做的是如何判斷目標相交和分離,以兩個目標相交為例,介紹本文所采用的簡單判斷方法。
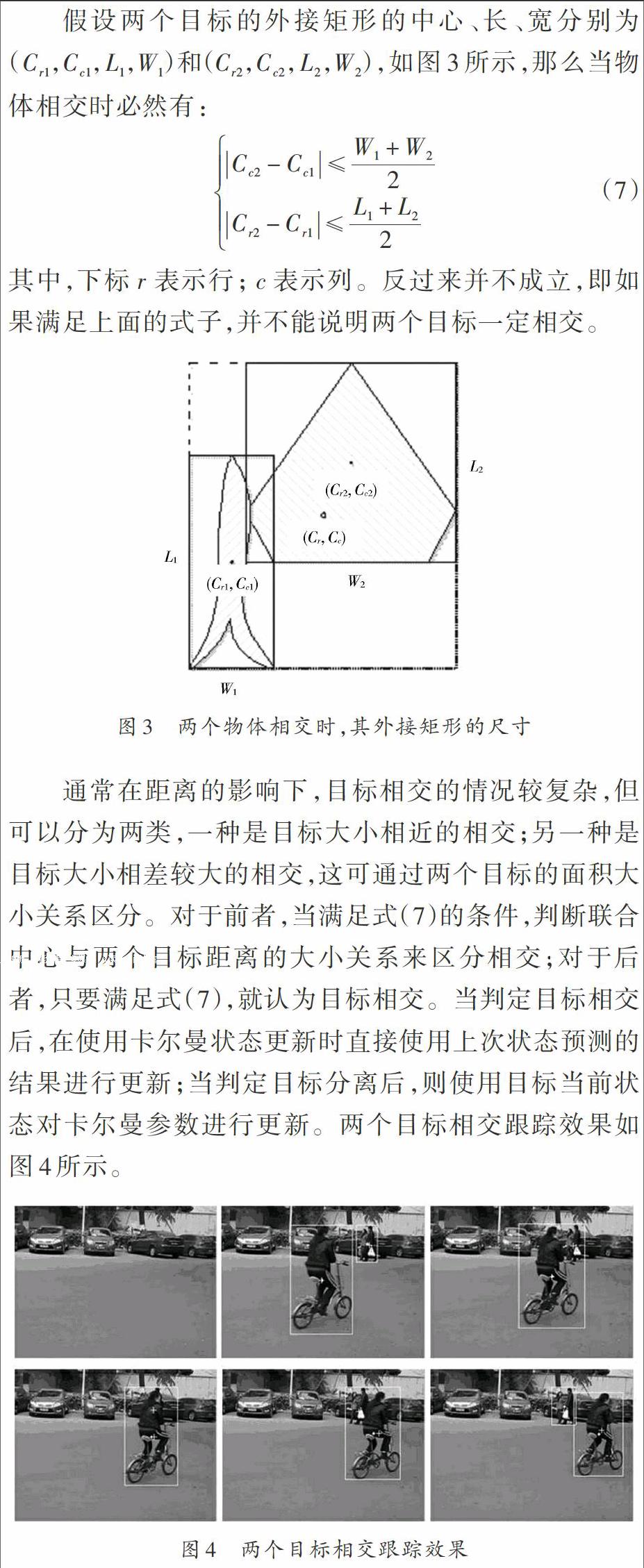
通常在距離的影響下,目標相交的情況較復雜,但可以分為兩類,一種是目標大小相近的相交;另一種是目標大小相差較大的相交,這可通過兩個目標的面積大小關系區分。對于前者,當滿足式(7)的條件,判斷聯合中心與兩個目標距離的大小關系來區分相交;對于后者,只要滿足式(7),就認為目標相交。當判定目標相交后,在使用卡爾曼狀態更新時直接使用上次狀態預測的結果進行更新;當判定目標分離后,則使用目標當前狀態對卡爾曼參數進行更新。兩個目標相交跟蹤效果如圖4所示。
從圖4中可以看出,在目標相交后,由于采用勻速直線運動模型,當物體運動的速度或尺寸有變化時,會對卡爾曼跟蹤造成一些影響,一般情況下,物體間相交的時間不長,故影響不大,當物體分開后,可以很快收斂。
3 運動目標分類
通過Adaboost算法進行目標分類的結果如表1所示,其中測試樣本由100人、100輛自行車、50輛汽車組成,共250個目標;雜物由表1所示樣式組成。
在測試過程中發現,有些自行車樣式很接近單個人的外形,用簡單的特征訓練成的強分類器并不能對其很好的分類。所以,為了減少雜物的干擾,本文提出了一種使用模板計算互相關系數作為BP神經網絡[13,18]的輸入,然后進一步對目標分類,以提高對非有效目標的分類效果的方法。
首先采集大量的人、自行車、汽車二值的圖像,分別轉換到特定的大小,比如,人轉為100×50像素,自行車轉為60×60像素,汽車轉為40×100像素。然后對各組圖像取平均值,將獲得的結果作為計算系數的模板,如圖5所示。
采用本文的目標分類方法后,得到的分類效果如表2所示。
從表2中可以看到,采用本文的方法不但使人、自行車、汽車分類更加準確,更將雜物的分類準確率提高到原來的8倍以上,大大減少了雜物帶來的干擾,使整個系統變得更加可靠。
4 結 語
本文分別從運動目標檢測、目標跟蹤、目標分類三個方面進行研究設計,最終檢索并分析出視頻序列中特定目標的數量、顏色、出現和消失時間并生成記錄文件。在目標檢測階段,提出一種幀間差分法和減背景技術相結合的運動目標檢測方法,采用中值濾波、結合形態學處理及面積閾值化等方法去除噪聲,同時對背景圖像實時更新,以減少光照等擾動的影響;在目標跟蹤分析階段,提出一種簡化的Kalman濾波跟蹤算法,并結合目標特征之間的歐氏距離尋找最佳匹配目標,從而獲取目標運動軌跡,分析了目標相交分離所需滿足的條件,較好地處理了多目標跟蹤中的部分問題;在目標分類研究設計中,提出一種先用Adaboost算法對多目標進行初分類,再結合模板計算互相關系數,并使用BP神經網絡進行再分類的方法。經測試,該方法能較好地檢測出人、自行車和汽車等物體,并對干擾目標有很好的區分;最后本文將目標檢測、跟蹤和分類等過程相結合,實現了一個實用、高效的目標檢測系統。
參考文獻
[1] HUANG Jinjie, JIANG Yongfu. An improved approach to calculation of the optical flow field for color image sequences [C]// Proceedings of 2010 International Forum on Strategic Technology. Ulsan: IEEE, 2010: 312?317.
[2] INDU S, GUPTA M, BHATTACHARYYA A. Vehicle tracking and speed estimation using optical flow method [J]. International Journal of Engineering Science and Technology, 2011, 3(1): 429?434.
[3] ENRIQUE J, SANCHEZ F, DIAZ J, et al. Background subtraction based on color and depth using active sensors [J]. Sensors, 2013, 13(7): 8895?8915.
[4] THIND B T. Background subtraction techniques?review [J]. International Journal of Innovative Technology and Exploring Engineering, 2013, 2(3): 166?168.endprint
[5] LIAN Xiaofeng, ZHANG Tao, LIU Zaiwen. A novel method on moving?objects detection based on background subtraction and three frames differencing [C]// Proceedings of 2010 International Conference on Measuring Technology and Mechatronics Automation. Changsha, China: IEEE, 2010: 252?256.
[6] 薛麗霞,羅艷麗,王佐成.基于幀間差分的自適應運動目標檢測方法[J].計算機應用研究,2011,28(4):1551?1552.
[7] 胥欣,江登表,李勃,等.混合高斯模型運動檢測算法優化[J].計算機應用研究,2013,30(7):2190?2194.
[8] KIM K, CHALIDABHONGSE T H. Real?time foreground?background segmentation using codebook model [J]. Real?Time Ima?ging, 2005, 11(3): 172?185.
[9] PATEL H A, THAKORE D G. Moving object tracking using Kalman filter [J]. International Journal of Computer Science and Mobile Computing, 2013, 4(2): 326?332.
[10] KAUSHIK S. 3D real?time tracking and recognization of moving object using Kalman filter [J]. International Journal of Engineering Research, 2013, 2(7): 438?441.
[11] SUN Jian. A fast Meanshift algorithm?based target tracking system [J]. Sensors, 2012, 12(6): 8218?8235.
[12] 白笛,張冰,朱志宇.目標跟蹤的自適應雙重采樣粒子濾波算法[J].計算機科學,2013,40(3):248?250.
[13] [加] HAYKIN S.神經網絡與機器學習[M].申富饒,徐燁,鄭俊,等譯.3版.北京:機械工業出版社,2011.
[14] CHANG H L, YUE Taiwen. Entropy?directed AdaBoost algorithm with NBBP features for face detection [J]. Information Technology Journal, 2011, 10(8): 1518?1526.
[15] ATHIRAJA A, BARANIDHARAN A, VIGNESH S, et al. The efficient SVM kernel method for image compression and image recognition [J]. International Journal of Advanced Computer Research, 2012, 2(1): 55?60.
[16] GUPTE S, MASOUD O. Detection and classification of vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1): 37?47.
[17] 黎洪松.數字視頻處理[M].北京:北京郵電大學出版社,2006.
[18] 朱凱,王正林.精通Matlab神經網絡[M].北京:電子工業出版社,2010.endprint
