船載衛通站雙電機偏置電流自適應設置方法
2015-10-22 21:02:38吳波濤徐智超胡新寧
現代電子技術 2015年19期
吳波濤 徐智超 胡新寧
摘 要: 針對船載衛通天線[E]軸在大風浪情況下電機頻繁換相的問題,提出了在不同海況下驅動器偏置電流值的自適應設置方法。結合船載設備復雜的海上作業環境,建立了伺服系統雙電機驅動的動力學模型,詳細分析了合成風力矩對伺服系統負載的影響及其與系統偏置電流設置對電機換相的關系。在此基礎上,提出了偏置電流值的自適應設置方法,并在Matlab/Simulink環境中搭建仿真模型,研究了不同的偏置電流設置值對船載衛通站伺服系統動態性能的影響。
關鍵詞: 偏置電流; 雙電機模型; 自適應方法; 船載衛通站
中圖分類號: TN828.5?34; TP23 文獻標識碼: A 文章編號: 1004?373X(2015)19?0102?04
Abstract: To solve the frequent commutation of E?axis motors of shipborne satellite communication antenna under the situation of large storm, an adaptive setting method of the drivers bias current under different sea conditions is proposed. In combination with the complex marine operation environment of the shipborne equipments, the dynamics model of dual?motor drive of servosystem was established. The influence of wind synthesis torque on servosystem load is analyzed, and the relation of wind synthesis torque and bias current setting to motor commutation is illustrated. Based on this, the adaptive bias current setting method is proposed. Simulation model was built in Matlab/Simulink, and the effects of different bias current settings on servosystem dynamic performance of shipborne satellite station are researched.
Keywords: bias current; dual?motor model; adaptive method; shipborne satellite communication station
0 引 言
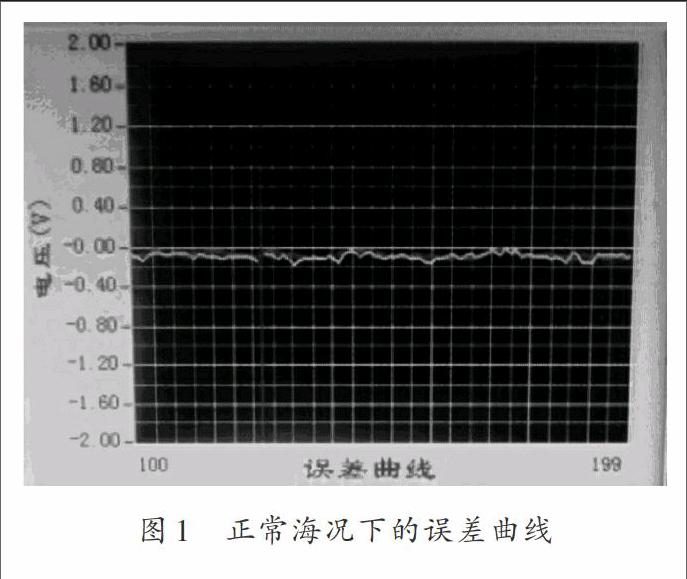
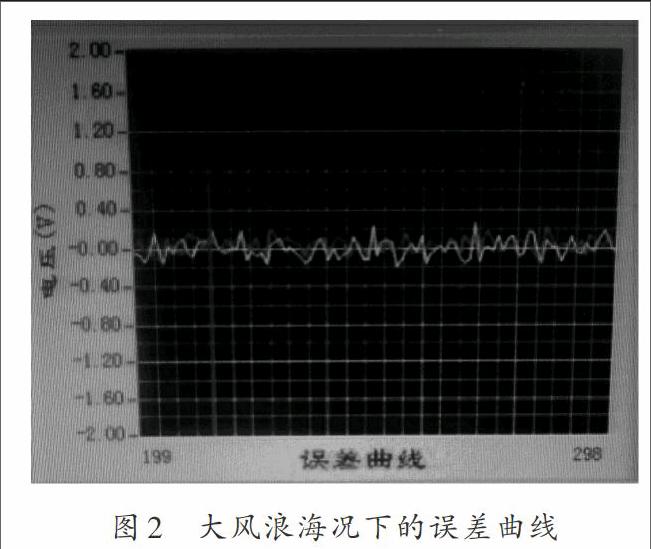
海上實施衛星通信作業影響因素多、執行難度大,其中海況優劣情況直接影響著作業執行難度,精度較高的天線伺服跟蹤系統是確保穩定通信的關鍵[1?3]。為確保跟蹤精度,驅動系統往往采用雙電機消隙方式消除齒隙誤差[4?6]。惡劣海況下,船體搖動加劇;同時大風作用于通信天線產生巨大的風負載,對驅動系統產生影響。圖1,圖2所示分別為天線跟蹤衛星在較為良好的海況與惡劣海況下的誤差曲線。對比圖1,在大風浪情況下誤差曲線抖動嚴重,表明系統跟蹤精度明顯下降;其中圖2出現多處毛刺,說明大風浪情況下電機換向明顯,傳動齒輪摩擦加劇。對于雙電機驅動系統,電機換向與偏置電流的設置有關,針對此問題,本文建立雙電機消隙的伺服系統動力學模型,分析風力矩與偏置電流設置的關系,提出驅動功放消隙偏置電流值自適應設置方法,并利用Matlab/Simulink對系統進行仿真,分析不同偏置電流的設置值對系統動態性能的影響。
1 海況對伺服系統跟蹤性能的影響分析
衡量海況的指標包括浪高、風力和能見度,其中對船載衛通站伺服系統跟蹤造成影響的主要是浪高和風力[7]。下面分別研究這兩個指標對伺服系統跟蹤性能的影響。
1.1 浪高對伺服系統跟蹤性能的影響
浪高指標是指海浪距海平面的高度,海浪越高,船搖角度越大,船搖速度越快。船載衛通伺服系統環路設計從外至內分別為位置環、速度環、電流環,船搖誤差量主要依靠其中的位置環和速度環進行隔離,衛通伺服系統的隔離度一般可達42 dB,船搖誤差對跟蹤精度的影響可忽略不計,即浪高對跟蹤精度不造成影響。
1.2 風力對伺服系統跟蹤性能的影響
風力指標是指海風的速度,風力級別越高,風速越大。天線的風負荷和天線口徑的二次方成正比,天線口徑越大,風引起的負載力矩迅速增大,如何克服風負載也是伺服系統設備必須解決的一個問題,衛通伺服系統中天線負載變化對跟蹤精度造成的影響主要是依靠其系統環路中的電流環解決的。其中偏置電流設置直接影響著電流環的性能優劣,即能否克服風引起的天線負載變化。
2 偏置電流設置要求
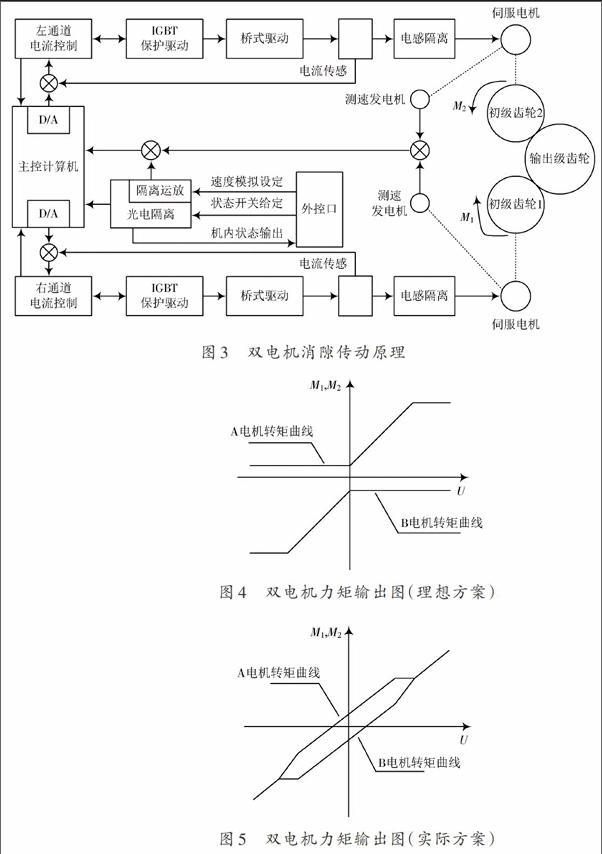
為消除天線傳動間隙造成的誤差,衛通伺服系統采用雙電機消隙驅動方式,其由兩套獨立的電流環和功率放大器分別驅動兩臺執行電機,兩臺執行電機分別聯接在結構完全相同的兩臺減速器上,兩臺減速器的輸出小齒輪共同嚙合負載大齒輪,兩套獨立的電流環指令由帶有偏置電路的速度環路分配,控制兩驅動電機使兩臺減速器在靜止情況下產生相反的偏置力矩實現消隙的功能,如圖3所示。
為了實現消隙控制,理想方案是使兩個電機分別作為正向驅動和反向驅動的動力電機,正向電機在反轉時保持輸出一個足已消除傳動間隙的正向力矩,反向電機在正轉時則保持輸出反向力矩,具體曲線如圖4所示。在這個方案中,任意時刻都有一個電機處于反向出力狀態,所以要求每個電機的功率都大于系統實際所需功率,消耗過大。endprint
為了更為經濟,實際應用中采用了一種近似方案,如圖5所示。系統在單方向輸出力矩時,傳動系統的力矩傳遞方向不變,并不存在間隙問題,只有在系統變換力矩傳遞方向時,間隙問題才凸顯出來,所以實際消隙控制是在系統力矩輸出為零的區域附近對兩個電機施加一個足以克服間隙的力矩偏置,使得這一力矩范圍內的兩個電機實施消隙驅動。
根據以上分析可知,若偏置電流設置過小,會導致偏置力矩過小,當外界風引起的天線負載變大時,可能導致系統處于無法消隙狀態,進而導致跟蹤精度下降;若偏置電流過大,則會導致偏置力矩過大,使得傳動齒輪間的摩擦加劇,對天線結構造成損傷。綜上兩點考慮,偏置電流一般需要設置為大于單電機工作時的摩擦電流且不超過電機負載電流的10%。由于電機負載電流是隨負載變化而變化的,如何準確得到風引起的電機負載電流變化量是準確設置偏置電流的關鍵,這可以通過建立驅動系統模型并在Matlab中進行解算。
3 系統建模
3.1 天線伺服系統簡化模型[7?9]
船載衛星通信站伺服分系統通過驅動功率放大器輸出電流控制電機轉動,再通過減速箱多級傳動驅動天線轉動。為對天線驅動系統進行分析,對系統進行簡化。執行元件及其負載的傳遞函數是伺服系統建模的最重要環節。對于大中型衛星通信站天線伺服系統,其結構諧振特性應屬于考慮范圍。將天線體的轉動慣量集中為慣量[JL],把天線結構剛度完全集中在兩個齒輪箱上,每個齒輪箱輸出軸端剛度等效為[KL],同時忽略電機和齒輪箱的摩擦等非線性因素,最終得到雙電機驅動天線的物理簡化模型,如圖6所示。
其中,[Ra]為電機電樞回路的電阻之和;[Ua]為電機電樞電壓;[La]為電機電樞回路的電感之和;[Ue]為電機的反電動勢;[ia]電機電樞回路內的電流;[Jm]為電機的轉動慣量;[JL]為負載的轉動慣量;[θm]為電機的角位移;[θ′L]為傳動系統輸出角位移;[θL]為天線的角位移;[i0]為減速器的傳動比。通過Laplace變換,將方程變換至頻域,可得伺服系統框圖,如圖7所示。
3.3 合成風力矩
獲得了風速與達到拐點電流的偏置電流設置值的關系后,基于天線狀態和所測得的合成風速,自適應設置偏置電流為此值下的1.1倍左右,一方面可以解決大風浪下電機頻繁換相的問題;另一方面在小風浪下,可以避免天線齒輪不必要的磨損。
4.3 不同偏置電流設置下系統動態性能分析
在Matlab/Simulink軟件中,搭建雙電機伺服系統模型進行仿真。仿真模型如圖9所示。
仿真計算不同風速下的系統階躍響應,結果如圖10,圖11所示。在風速改變的情況下,負載產生變化,改變偏置電流使電機不至于換相。對系統施加單位階躍輸入,從仿真結果可以看出,系統動態性能并未發生明顯變化,但改變偏置電流對小風下系統的機械結構起到保護作用。因此,此方法對于改進系統使用壽命有著積極作用。
5 結 論
本文從目前船載衛通站雙電機驅動伺服系統大風浪情況下驅動電機可能面臨的頻繁換相問題出發,建立船載衛通站伺服系統雙電機驅動模型并得出動力學方程。分析了合成風力矩與電機偏置電流設置的關系,在此基礎上提出了針對不同合成風速下的驅動電機偏置電流自適應設置方法。通過Matlab/Simulink仿真軟件,構建系統仿真模型,通過仿真分析驗證了系統在不同偏置電流下的系統動態性能。此方法對改善伺服系統性能及使用壽命具有實際意義。后續將對船搖和天線角度對驅動系統負載的影響等問題進行進一步研究。
參考文獻
[1] 孫曉望.船載“動中通”伺服控制系統的設計與實現[D].西安:西安電子科技大學,2013.
[2] 姜君.用于移動載體衛星通信的動中通系統若干關鍵問題研究[D].南京:南京理工大學,2012.
[3] 許磊磊.一種新型船載衛星通信天線控制器研究與應用[D].南京:南京郵電大學,2011.
[4] 邵俊鵬,唐念華.基于Matlab的重型數控機床雙電機消隙的仿真[J].機械工程師,2008(4):63?66.
[5] 陳赟,張永祥.基于偏執電流的雙電機伺服系統消隙[J].電子設計工程,2012,20(14):41?43.
[6] 尹翔陵.雙電機消隙直流驅動器的研究與設計[D].南京:南京理工大學,2006.
[7] 瞿元新.航天測量船測控通信設備船搖穩定技術[M].北京:國防工業出版社,2009.
[8] 李潤方,王建軍.齒輪系統動力學[M].北京:科學出版社,1995.
[9] 張磊,廖鑫江.大口徑天線伺服系統的建模及控制算法設計[J].華南理工大學學報:自然科學版,2013(5):22?27.
[10] 李紅梅.船載通信天線控制系統的穩定設計[J].電子設計工程,2010,18(6):51?52.
[11] 王世紅.船載天線伺服系統抗搖擺方案研究[J].無線電通信技術,2003,29(2):47?49.endprint
