利用LiDAR點云快速進行等高線制作
2015-10-15 19:23:03朱蕾蕾
科技資訊 2015年20期
朱蕾蕾
摘 要:該文討論在EPS2008基礎地理信息工作平臺下,采用柵格的方法快速完成海量點云自動生成等高線的方法。并在從化1:5000地形圖測制中得到應用,且取得了較好的成效。
關鍵詞:點云 柵格 等高線
中圖分類號:TP79 文獻標識碼:A 文章編號:1672-3791(2015)07(b)-0000-00
測繪工程實踐需要利用LiDAR點云對等高線進行提取。因點云數據的量太大,使得在對點云進行處理的過程中,利用點云數據對三角網進行構建,并基于三角網對等高線進行追蹤,這種多在常規矢量中應用的處理方法不能達到理想的效果,或者無法使用。等高線自動生成是在EPS2008基礎地理信息工作平臺下開發的機載LiDAR測圖系統的子模塊之一,通過使用柵格的方法使海量點云等高線自動生成這一難題得到成功的解決。
1 機載LiDAR測圖系統
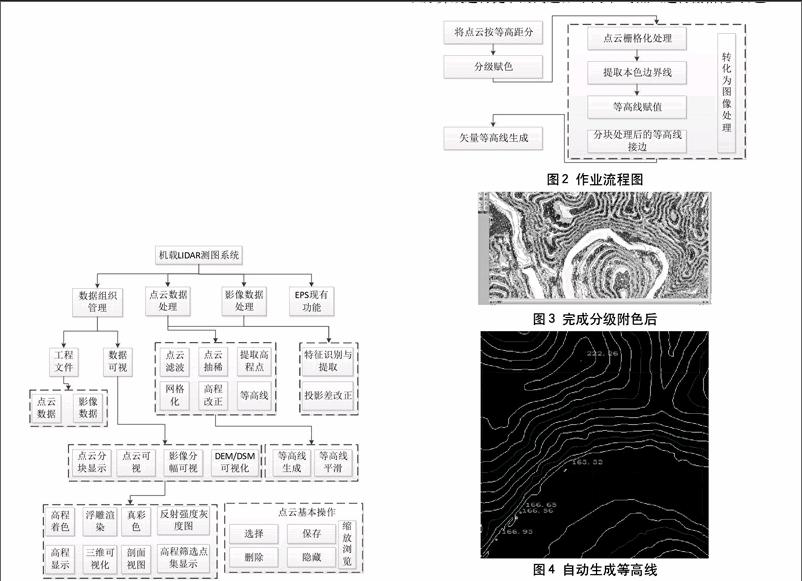
以Eps2008地理信息工作站(以下簡稱EPS)為基,使用機載LiDAR測制城市基本比例尺地形圖的系統實施研發,采納點云與影像處理等制圖功能,以及Eps強大的數據編輯功能。依照從底至上的模塊化設計思想進行設計,總體功能框架見圖1。
圖1機載LiDAR測圖系統框架
2 海量點云數據管理與快速顯示技術
非常巨大的數據量,是點云數據特點的其中之一,在一個普通工程文件中,點云數據量就可達到幾億點。等高線自動生成的前提就要對海量點云進行編輯和處理,首先必須解決點云的管理和快速顯示的問題。本項目在點云數據描述與顯示環節進行優化,解決了超大點云數據存儲與顯示效率問題。主要采用了以下技術:(1)無損壓縮技術。(2)虛擬緩存技術。
(3)動態篩選技術。
3工作原理
將點云顯示和存儲的問題解決后,該文將對利用點云數據使等高線得到快速生產的基本原理進行探討:按照等高距,將點云分成不同的級,并給每級賦予同一種顏色,要使相鄰的分級顏色不相同;按照精度的要求,通過繪圖手段把分色之后的點云柵格化,使柵格圖片生成;通過采用圖像處理方法,將本色邊界線提取出來;對等高線進行賦值;讓分塊處理后的等高線實現接邊;由于圖像處理成熟,在實踐中有廣泛的應用,通過采用點云柵格化的方法,EPS成功地把基于點云生成等高線問題,變成基于圖像對色塊分界線進行提取的問題,又由于在對點云進行柵格化時,已經過濾掉了大多數的噪聲,從而使等高線柔順、光滑得到了保證。
4技術路線
該文結合工作生產實踐,提出了基于利用LiDAR點云快速進行等高線制作的作業流程,路線如圖2所示。
圖2作業流程圖
4.1數據獲取
該項目通過采用德國TopoSys公司的機載LiDAR系統Harrier68i對點云數據進行采集,前期數據處理主要采用TOPPIT、POSPAC、Terransolid等軟件進行了處理,然后將點云數據讀入EPS2008基礎地理信息平臺。
4.2點云分級賦色
在EPS2008基礎地理信息平臺下,對點云進行分級賦色,并且保證相鄰兩級點云的顏色不同,如圖3 所示。
圖3完成分級附色后
4.3圖像化處理及等高線的自動生成
按照精度的要求,通過繪圖手段把分色之后的點云柵格化,使柵格圖片生成;通過采用圖像處理方法,將本色邊界線提取出來;對等高線進行賦值;讓分塊處理后的等高線實現接邊;由于圖像處理成熟,在實踐中有廣泛的應用,通過采用點云柵格化的方法,EPS成功地把基于點云生成等高線問題,變成基于圖像對色塊分界線進行提取的問題,又由于在對點云進行柵格化時,已經過濾掉了大多數的噪聲,從而使等高線柔順、光滑得到了保證。見圖4。
圖4自動生成等高線
5生產應用
筆者所在單位于2011年完成從化1985平方公里1;5000地形圖測制,其中2/3是山地,需要繪制等高線。項目數據獲取采用德國TopoSys公司的機載LiDAR系統Harrier68i。前期數據處理主要采用TOPPIT、POSPAC、Terransolid等軟件,地形圖測制利用EPS2008基礎地理信息平臺,得到1:5000地形圖測繪產品成果。經過對項目成果的檢驗,最終得到地形測繪成果點位平面中有0.60m的誤差,高程中有0.161m的誤差,點位間距中有0.601m的誤差,成果的邏輯一致性、要素的完備性、屬性精度等,都和設計和規范要求相符合。
6結語
該文立足測繪新技術的應用,在EPS2008基礎地理信息平臺下,利用LiDAR點云數據快速生成等高線的工作原理進行了梳理。依照以往對其他軟件進行使用的經驗,由點云直接、大面積、快速地生成等高線的方法,有著占用計算資源少、操作相對簡單、圖面美觀、速度較快等諸多優勢。
參考文獻
[1] 高建雙.激光成像雷達掃描技術的研究[D].成都:電子科技大學,2012.
[2] 王俊宏. LIDAR數據處理關鍵技術研究[D].武漢:華中科技大學,2012.