兩輪獨立驅動電動車驅動控制系統(tǒng)的研究
2015-10-15 05:46:13高志彬王大山牛賀功汪攀
汽車實用技術 2015年9期
關鍵詞:汽車
高志彬,王大山,牛賀功,汪攀
(青島理工大學,山東 青島 266520)
兩輪獨立驅動電動車驅動控制系統(tǒng)的研究
高志彬,王大山,牛賀功,汪攀
(青島理工大學,山東 青島 266520)
文章以兩輪獨立驅動的電動車為研究對象,探討了整車的驅動控制系統(tǒng)。系統(tǒng)以汽車穩(wěn)定性為控制目標,基于橫擺力矩實現(xiàn)車輪驅動力矩的分配,并在MATLAB環(huán)境下,建立了整車驅動控制系統(tǒng)的仿真模型,驗證了控制系統(tǒng)的有效性。結果表明:基于橫擺力矩的整車控制系統(tǒng)較好的跟蹤目標參數(shù),能有效提高汽車操縱穩(wěn)定性。
兩輪獨立驅動;橫擺力矩;模糊控制
10.16638/j.cnki.1671-7988.2015.09.005
CLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2015)09-12-04
引言
隨著能源危機、環(huán)境問題的日趨嚴重,節(jié)能環(huán)保的電動車日益受到人們的青睞。相比于傳統(tǒng)燃油汽車和中置式電機驅動的電動汽車,多輪獨立驅動電動車取消了發(fā)動機與傳動系,對于提高能源利用率,緩解噪聲與振動的問題,增強汽車主動安全與被動安全性能具有較大的優(yōu)勢。多輪獨立驅動的電動車在轉彎或者不平路面行駛時,需要采用電控方式控制各個車輪的驅動力矩分配,以實現(xiàn)電子差速和轉矩協(xié)調功能。因此,兩輪獨立驅動電動車驅動控制系統(tǒng)的研究具有重要的應用價值[1]。
本文構建在兩輪獨立驅動電動車動力學模型的基礎上,深入分析了以汽車穩(wěn)定性為控制目標,采用模糊控制策略,基于橫擺力矩的驅動控制系統(tǒng);并在理論研究的基礎上,在MATLAB/Simulink環(huán)境下,結合模糊控制工具箱,建立了整車轉矩協(xié)調控制系統(tǒng)的仿真模型,并對其輸出波形進行了分析研究,驗證了控制系統(tǒng)的有效性。
1、整車動力學模型的建立
整車動力學模型是整個系統(tǒng)研究的基礎,研究汽車運行特性時,需要以地面作為固定參考坐標系[2],如圖1所示,以 X、Y、Z定義地面慣性坐標系,定義轉向行駛的車輛質心與x、y、z坐標系的原點重合,x軸方向是車輛縱向速度的方向,y軸方向是橫向速度的方向,z軸垂直于x、y平面向上。x軸與X軸的夾角為車身的航向角ψ,即兩坐標系的夾角ψ,則繞z軸的方向上的橫擺角速度γ=。
假設將轉角輸入直接作用于車輪,即忽略轉向系統(tǒng);車輛在平坦路面行駛,即忽略z軸方向上的運動。包括懸架系統(tǒng)在內的車輛結構是剛性的,即不考慮汽車繞x、y軸的轉動,建立包括三個車身自由度:縱向、橫向、橫擺,四個車輪的轉向自由度的七自由度整車動力學模型,如圖1所示。
構建了汽車縱向、橫向和橫擺運動動力學方程得:縱向運動動力學方程:
橫向運動動力學方程:橫擺運動動力學方程:

2、整車驅動控制系統(tǒng)的設計
整車驅動控制系統(tǒng)基于汽車穩(wěn)定性的控制目標,將橫擺角速度和質心側偏角作為目標參數(shù),通過二自由度的車輛模型,完成對控制目標參數(shù)期望值的計算,通過質心側偏角觀測器與整車模型反饋得到目標參數(shù)的實際值,以目標參數(shù)的誤差值為輸入量,基于模糊控制輸出汽車所需的橫擺力矩,結合電子油門踏板輸入轉矩期望值,實現(xiàn)車輪驅動力矩的分配。整個控制系統(tǒng)(如圖2所示)分為三個部分:控制目標參數(shù)的制定、基于模糊控制的橫擺力矩的控制和轉矩分配模塊。
2.1系統(tǒng)控制目標參數(shù)的制定
汽車動力學穩(wěn)定性包括兩個方面:軌跡保持問題和汽車的穩(wěn)定性問題。軌跡保持即汽車能夠按照預設的軌跡運行,通常用質心側偏角來評價。汽車的穩(wěn)定性即汽車不發(fā)生側滑、激轉,通常用橫擺角速度的來評價。當質心側偏角較大時,根據(jù)β-method 理論,輪胎的側向力和車身的橫擺力矩都趨于穩(wěn)定值如圖(3)所示,輪胎處于非線性狀態(tài),改變輪胎轉角,已經(jīng)不能有效的控制車輛的轉向。當質心側偏角較小時,汽車穩(wěn)定性可以用前后輪側偏角的差值來描述,當前輪側偏角大于后后輪側偏角時,汽車為不足轉向,反之則為過多轉向[3]。因此,基于操縱穩(wěn)定性的整車控制系統(tǒng)應當將橫擺角速度和質心側偏角作為系統(tǒng)控制目標參數(shù)。
2.1.1橫擺角速度期望值與實際值的制定
根據(jù)汽車線性二自由度汽車動力學方程:
綜上分析,橫擺角速度的期望值應該表示為:
在汽車實際運行中,橫擺角速度可以通過傳感器進行實時測量獲得,根據(jù)圖2可以看出,橫擺角速度的實際值可以整車模型反饋獲得。
2.1.2質心側偏角期望值與實際值的制定
汽車的運動軌跡是用質心側偏角來評價的,在運行中,偏離預設軌跡,汽車將失去穩(wěn)定性,因此應盡可以能減小質心側偏角,使汽車按照預設軌跡運行,故將質心側偏角的期望值設置為0,即βd=0。
在汽車實際運行中,橫擺角速度可以直接獲得,而質心側偏角無法直接測量,本文通過質心側偏角狀態(tài)空間觀測器對其進行估算,得到實際值,從而得到質心側偏角的誤差,輸入到橫擺力矩控制模塊。根據(jù)整車七自由度的整車模型與輪胎側偏特性分析,質心側偏角的狀態(tài)空間方程觀測器可表示為[4]:
2.2基于模糊控制的橫擺力矩的控制
基于模糊控制的橫擺力矩的控制模塊是以橫擺角速度和質心側偏角的誤差 e(γ)、e(β)為控制變量,通過模糊推理,得到保持汽車穩(wěn)定行駛所需要的橫擺力矩,整個模塊主要包括物理量的模糊化、模糊規(guī)則的制定以及模糊量的清晰化三個部分。
本文根據(jù)相關仿真實驗數(shù)據(jù),對橫擺角速度誤差 e(γ)和質心側偏角的誤差 e(β)以及橫擺角速度Mz進行模糊化。橫擺角速度誤差 e(γ)的論域設定為e(γ)∈[-0.6,0.6],質心側偏角e(β)的論域設定為e(β)∈[-0.3,0.3],橫擺力矩的論域設定為Mz1∈[-1,1];e(γ)的語言變量設為五檔分別為:負大(NB)、負中(NM)零(ZE)正中(PM)、正大(PB), e(β)語言變量同樣分為五檔;橫擺力矩語言變量分為七檔分別為:負大(NB)、負中(NM)、負小(NS)、零(ZE)、正小(PS)正中(PM)、正大(PB)。模糊集的隸屬度函數(shù)采用了梯形和三角形隸屬度函數(shù),用圖形表示法表示如圖(4)、(5)、(6)所示。
模糊控制器是按照模糊規(guī)則進行模糊推理的,模糊規(guī)則是以模糊語言的形式描述操作人的經(jīng)驗,本文設計的模糊控制器的模糊規(guī)則共 25條如表 1所示,模糊推理方式采用Mamdani直接推理算法。模糊控制的輸出Mz1應為有確定值的清晰量,因此,需要將模糊量轉化為清晰量輸出,本文采用重心法,每條模糊規(guī)則對應的權重分配如表(1)所示。經(jīng)過清晰化的橫擺力矩是在模糊集上論域的值,轉化為實際值要乘以相應的比例因子,根據(jù)仿真實驗數(shù)據(jù)將比例因子確定為200,因此,實際值應為200Mz1。
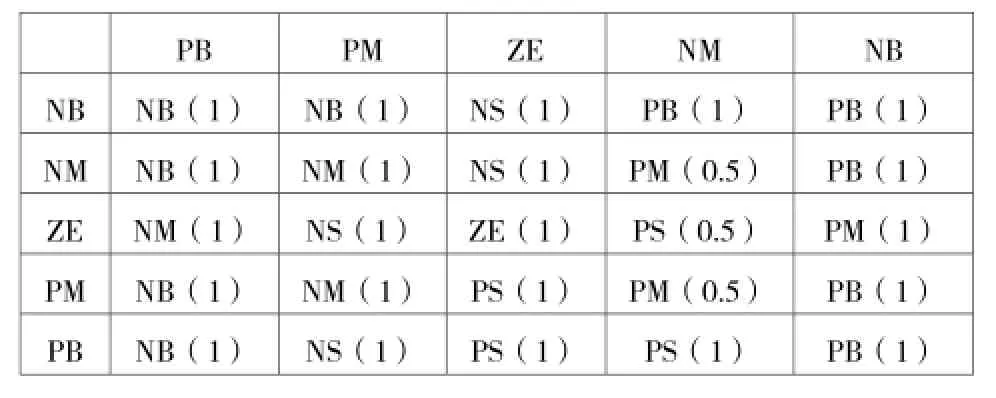
表1 模糊控制規(guī)則表及權重設置
在實際中,當車輪驅動力大于地面附著力時,汽車會出現(xiàn)車輪滑轉的現(xiàn)象,因此,汽車所需要的橫擺力矩需要考慮地面附著力約束。因此,基于模糊控制制定的橫擺力矩最大值應為:
當模糊控制輸出的橫擺力矩大于地面能提供的橫擺力矩時需要限制為Mmax,否則不起作用,即:
2.3驅動力矩的分配
驅動力矩分配層是根據(jù)油門踏板輸入的期望轉矩 Td以及橫擺力矩制定模塊輸出的轉矩Mz,進行轉矩分配。驅動力矩一方面要滿足油門踏板預定期望值,另一方面要滿足整車力矩平衡[5],即:要滿足公式(10)和(11):
3、兩輪獨立驅動控制系統(tǒng)的仿真分析
為了驗證控制系統(tǒng)的有效性,需要對兩輪獨立驅動控制系統(tǒng)進行仿真分析,以某汽車為例(具體參數(shù)如表2所示),分析在前輪角階躍輸入工況下,系統(tǒng)目標參數(shù)的輸出波形。根據(jù)美國ESV實驗標準:汽車先以直線行駛,達到實驗車速(40km/h及110km/h)后,突然以不小不小于500°/s的角速度(如圖7所示)轉動方向盤,方向盤轉角輸入為0.1rad保持不變,油門也不變[6]。
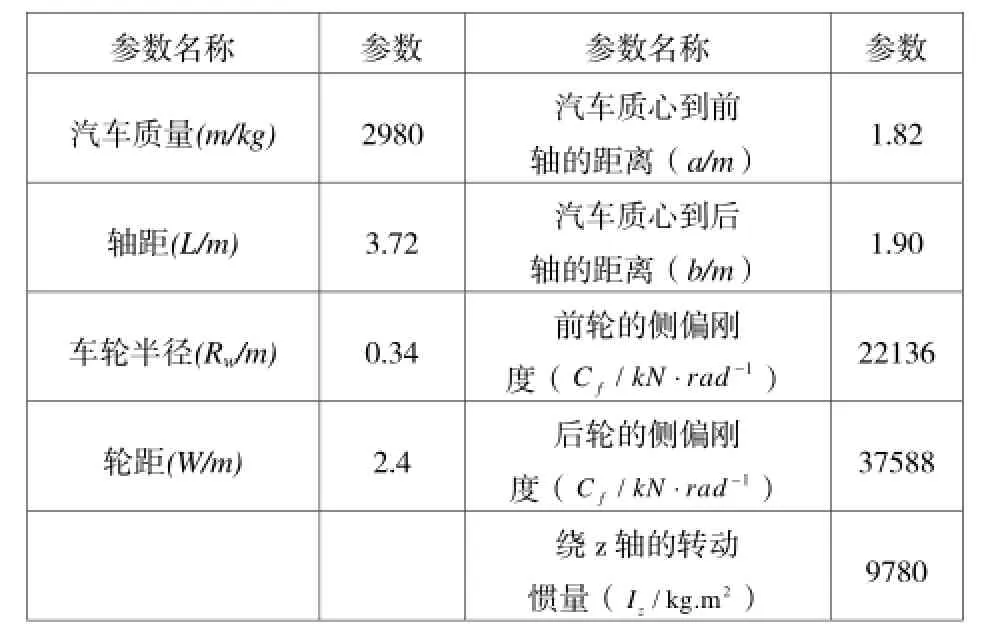
表2 汽車的結構參數(shù)
從圖8可以看出,汽車在1s時前輪角階躍輸入,未控制的車輛在1.8s時,橫擺角速度達到峰值0.3rad/s,在3.2s時達到穩(wěn)態(tài)0.27rad/s,質心側偏角在2s時達到最大值0.072rad,2.8s時趨于穩(wěn)定為0.07rad。施加橫擺力矩后,橫擺角速度波形的上升時間和峰值時間明顯縮短,響應波動較小,在 2s趨于穩(wěn)態(tài),穩(wěn)態(tài)誤差較小,質心側偏角 2s達到穩(wěn)態(tài)約為0.035rad。顯然,在汽車低速運行時,驅動力矩分配控制子系統(tǒng)控制時橫擺角速度響應速度快,能夠很好的跟蹤期望值,質心在側偏角控制在很小的范圍內,證明系統(tǒng)在汽車低速急轉彎時是有效的。
從圖9可以看出,汽車在高速急轉彎時,未控制的車輛1.7s時,橫擺角速度達到峰值 0.28rad/s,在 3s時趨于穩(wěn)態(tài)0.2rad/s,質心側偏角在2.2s時達到最大值0.11rad,2.8s時趨于穩(wěn)定值為 0.95rad,施加橫擺力矩后,橫擺角速度在 1.6s時達到峰值0.17rad/s,在2.2s波動較小,趨于穩(wěn)態(tài),在3s時,基本與期望值重合,質心側偏角2s達到穩(wěn)態(tài)約為0.5rad。據(jù)此可以看出,整車控制系統(tǒng)能在高速運行時也能有效的控制車輛的穩(wěn)定運行。
4、結論
本文以兩輪獨立驅動的電動車為研究對象,探討了以橫擺角速度和質心側偏角的誤差為控制變量,基于橫擺力矩控制的整車驅動控制系統(tǒng)。MATLAB/Simulink仿真分析表明有控制的車輛能夠很好的跟蹤期望值,響應快、超調小,有效的提高了汽車的操縱穩(wěn)定性。
[1] 李剛.四輪獨立驅動輪轂電機電動汽車研究綜述[N].遼寧工業(yè)大學學報,2014(01):47-52.
[2] 喻凡,林逸. 汽車系統(tǒng)動力學[M].北京:機械工業(yè)出版社,2014.
[3] 程軍. 汽車動力學控制的模擬[J].汽車工程,2013,04:199-205.
[4] 周翠玉.微型電動汽車電子差速控制的研究[D].河北聯(lián)合大學,2013.
[5] 蔣振江.四輪獨立驅動電動汽車驅動控制策略的研究[D].重慶理工大學,2012.
[6] 余志生.汽車理論[M].北京:機械工業(yè)出版社,2009.
Research on the driven control system of electric vehicle driven by two independent wheels
Gao Zhibin, Wang Dashan, Niu Hegong, Wang Pan
( Qingdao Technological University, Shandong Qingdao 266520 )
The paper takes electric vehicle driven by two independent wheels as the research object,discussed the drive control system of the vehicle.The system takes automobile stability as the control target,distribution of wheel drive torque based on yawing moment control. In the MATLAB,the simulation model of the vehicle driving control system is established,to show the validity of the control system is verified. The results show that tracking target parameters based on the yaw moment vehicle control system can effectively improve vehicle handling stability.
Driven by two independent wheels; Yawing moment; Fuzzy control
U469.7
A
1671-7988(2015)09-12-04
高志彬,副教授,就職于青島理工大學,研究方向為汽車電子和汽車動力學。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優(yōu)秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
